
Abstract
In this paper, we present a novel method to achieve collision-free formation control for multiple nonholonomic wheeled mobile robots. By utilizing the leader–follower strategy, an integrated controller that combines a sliding mode controller for formation control and a force function for obstacle avoidance is proposed. To address the common chattering issue associated with sliding mode control, a novel depletion model is developed, which constrains the controller input to vary smoothly within a small range and effectively eliminates chattering. Additionally, a dynamic-gain structure is introduced to reconcile the conflicting demands of formation control and obstacle avoidance, providing enhanced coordination between the two tasks. Simulation and experiments’ results are provided to illustrate the effectiveness of the proposed method.
Keywords
Introduction
With the improvement of the embedded computing and communication capabilities, the multi-agent systems (MASs) that possess good robustness, high fault tolerance, and strong scalability, could carry out complex tasks more flexibly and effectively (Sun et al., 2022; Wang et al., 2023a, 2023b). The formation control of multiple mobile robot systems has wide applications in both military and civilian fields (Hosseinzadeh et al., 2018; Li et al., 2022; Lin et al., 2018), such as target tracking, search and rescue, and patrol. In the formation control, multiple agents move toward a specific target or direction, while maintaining a predetermined geometric shape among each other and adapting to environmental constraints (Oh et al., 2015). To achieve this objective, various formation control strategies have been developed, including virtual-structure approach (Zhang et al., 2012), behavior-based control (Antonelli et al., 2009), and leader–follower strategy (Consolini et al., 2008; Dai et al., 2019; Zhao et al., 2022). Due to its simplicity and ease of implementation, the leader–follower strategy has received much attention (Liu et al., 2024b).
Formation control imposes high demands on the controller. The sliding mode control is a special type of variable structure control (Utkin et al., 1978), which has strong robustness against the external disturbances and the internal uncertainties of the system (Sabiha et al., 2022; Sun et al., 2021; Zheng et al., 2015). The trajectory tracking performance of nonholonomic wheeled mobile robots (NWMRs) may be affected by the disturbances and the internal uncertainties (Xie et al., 2022). Therefore, the sliding mode control is introduced into formation control (Chang et al., 2011; Damani et al., 2023; Elayaperumal et al., 2023; Fei et al., 2020; Li et al., 2018; Yang et al., 2023). For extremely complex environments, the formation tracking control of autonomous underwater vehicles with model parameter uncertainties and external disturbances was investigated, and the followers could track and guide the leader robot within a given stability time based on sliding mode control (Gao et al., 2020). In Yu et al. (2023), the neural adaptive sliding mode controllers were proposed for multiple unmanned aerial vehicles (UAVs), which could compensate for composite uncertainties to ensure good tracking performance. Despite its excellent characteristics, chattering is commonly present in sliding mode control (Norsahperi et al., 2020). In this paper, a sliding mode tracking controller for nonholonomic wheeled robots is designed, and a depletion model is constructed to solve the chattering problem commonly existing in the sliding mode controller.
Furthermore, the application of robot formation control in the obstacle environment remains challenging (Liu et al., 2024a). The artificial potential field (APF) method (Khatib, 1986) is a classic obstacle avoidance method for robots, which has good real-time performance and smooth obstacle avoidance trajectory and is widely used in path planning for mobile robots (Chen et al., 2016; Hao et al., 2022; Peng et al., 2023; Wu et al., 2023). The APF method was adopted in formation control of the multi-robot by designing the appropriate controller (Mu et al., 2020; Pan et al., 2021; Shou et al., 2022). By adopting an improved APF method, the formation obstacle avoidance method was proposed for multi-robot path planning and preventing collisions between machines based on the adaptive proportional–integral–derivative (PID) controller (Pan et al., 2019). In order to ensure collision-free formation of MASs, the APFs and time-varying topology were introduced to the original controller (Fei et al., 2023). Path-planning methods based on APF are also commonly used to address obstacle avoidance issues in robot formation (Tong et al., 2022). Different from most obstacle avoidance methods by adopting the pre-path-planning (Wang et al., 2017), this paper introduces a force function and a dynamic-gain structure to achieve obstacle avoidance in formation, which could effectively save computing resources and improve the formation efficiency of multi-robot systems.
Motivated by the aforementioned research, we propose an integrated collision-free formation control method based on sliding mode control and force function for NWMRs. The primary contributions are summarized as follows:
Based on the leader–follower strategy, a sliding mode tracking controller is designed for NWMRs. In order to address the chattering problem caused by abrupt changes in controller output due to large or rapidly changing inputs, a novel depletion model is constructed, which smoothly constrains the controller input within a small range and effectively eliminates the chattering issue.
In Wang et al. (2017), the obstacle avoidance is achieved through path -planning using the APF method, which requires each robot to complete its path planning independently. To relax this limitation, attractive force and repulsive force functions are constructed to address the obstacle avoidance problem, where the attractive and repulsive forces act as control inputs on the robot rather than being used for path planning.
In most previous results, the integrated controller adopts the sum of the formation control input and the obstacle avoidance control input. However, robots may deviate from the formation in order to avoid obstacles. Hence, a dynamic-gain structure is developed to adjust the formation control input and obstacle avoidance control input, which enables robots to have a certain autonomous -decision-making capability between maintaining formation and avoiding obstacles.
The structure of this article is as follows. In Section “Problem formulation,” the system models and the control objective are introduced. The main results are presented in Section “Main results.” The simulation and experiment results are provided in Section “Evaluation and experimental results.” The conclusion is drawn in Section “Conclusion.”
Problem formulation
Based on the leader–follower strategy, the formation control problem of the nonholonomic wheeled robots is described in this section.
System model
Consider a multi-mobile robots system with

where
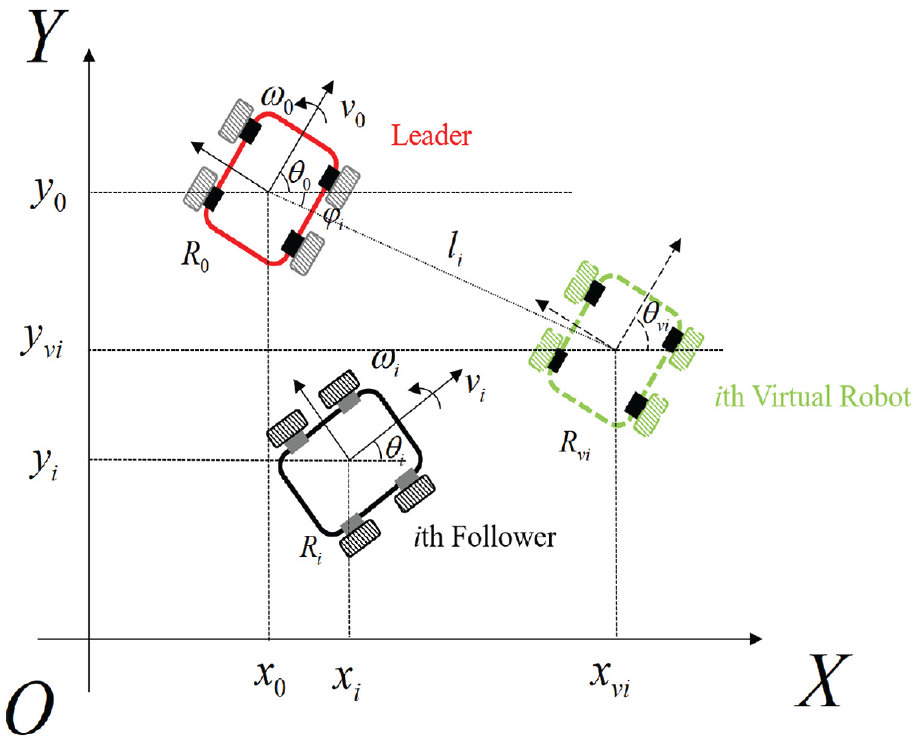
The leader–follower formation.
In order to achieve multi-robot formation, we adopt the leader–follower strategy. The trajectory of the leader is planned in advance by the upper computer, and followers are driven to follow the leader with a desired formation. The

where

Then, the tracking error

Combining (1) and (3), the time derivative of

Therefore, the tracking control problem is transformed into an origin stability problem in the error system (5).
Objective
The objective of our work is to devise a distributed controller for the error system (5) in an obstacle environment, such that
all the tracking errors
follower robots could autonomously avoid obstacles upon encounter and resume formation after obstacle avoidance, that is, the formation performance is resilient.
Main results
By combining the sliding mode controller and force function, the integrated controller is constructed in this paper, and the entire controller structure is shown in the Figure 2.
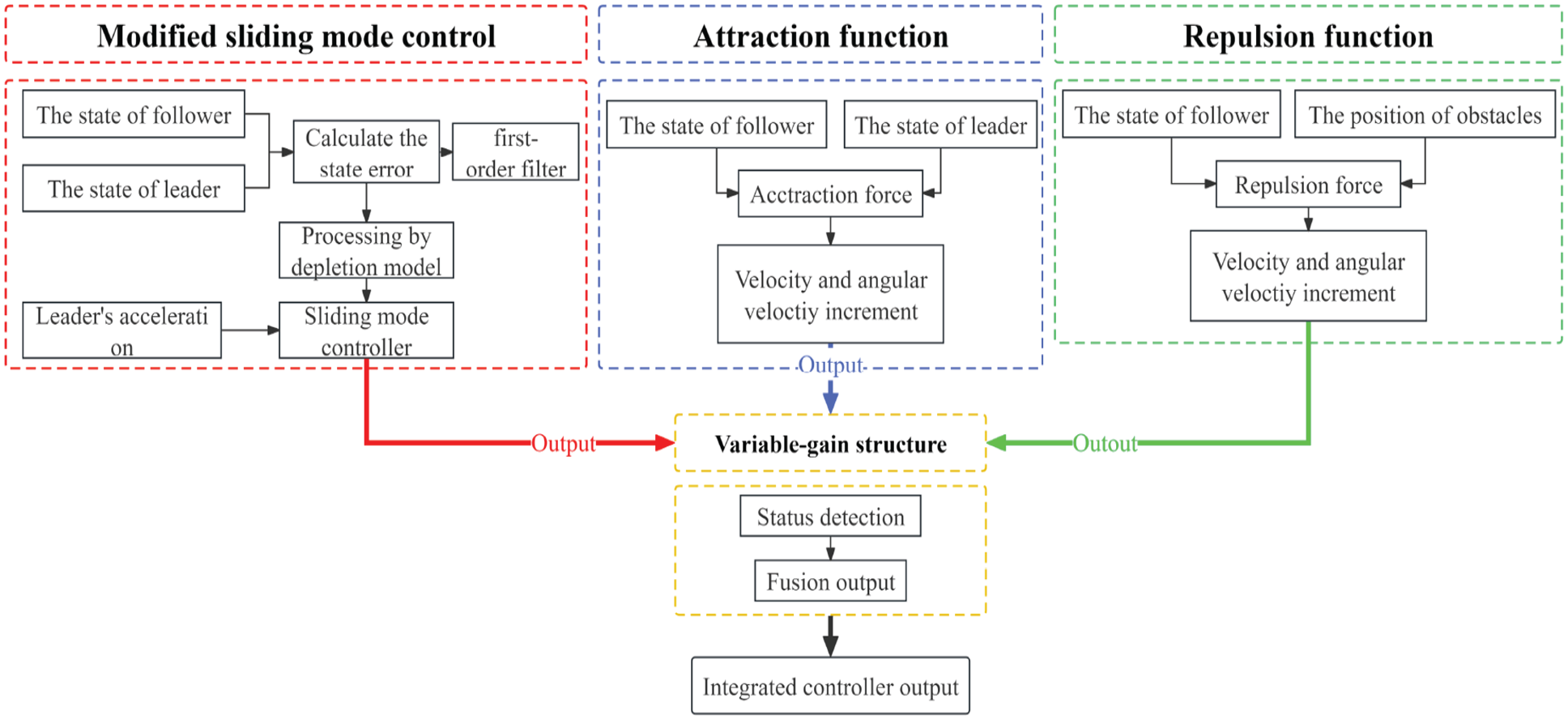
The integrated controller structure.
Design of sliding mode controller
In order to make the error system (5) converge to the origin, the sliding mode controller is designed in this section.
We adopt the backstepping method to construct the sliding mode surface as follows:

where
Then, in order to converge system states to the designed manifold


where
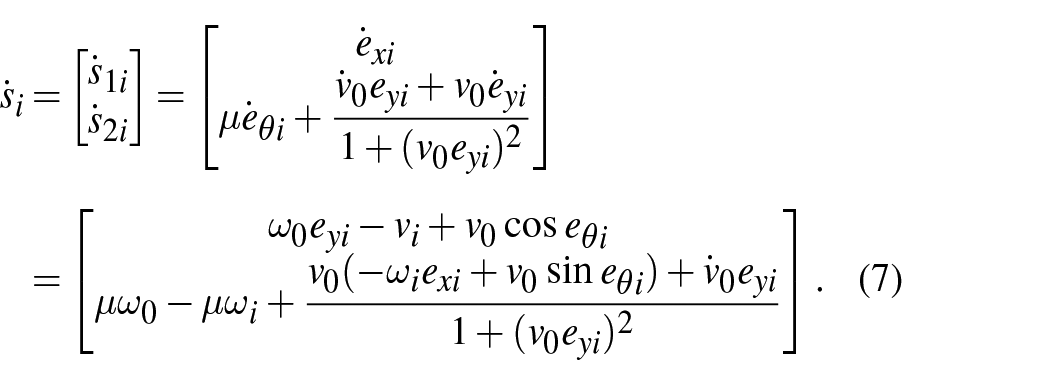
By setting

Combining (8), the derivative of
From Yu et al. (2005), it can be deduced that

The convergence of

From

Thus,
Depletion model
In order to solve the chattering, the following depletion model (15) is introduced to process the system input:

where



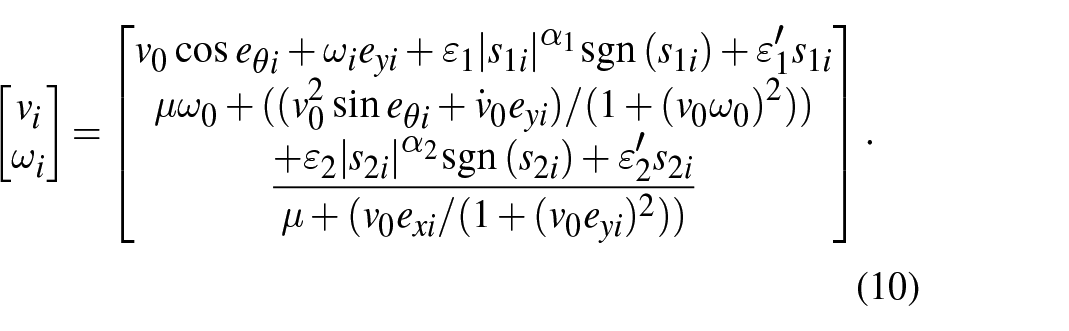
From (16) to (18), the modified sliding mode control law is proposed as
where
where
Formation obstacle avoidance
In order to achieve the formation task of realistic scenarios, the obstacle avoidance method combined with the sliding mode control law is given to form an integrated formation controller.
Inspired by the APF method,the obstacles exert a repulsive force on the follower, while the virtual robot exerts an attractive force on the corresponding follower. Under the resultant force, the robots could avoid the obstacles. The attractive force function (21) and repulsive force function (22) are constructed as follows:

where
As shown in Figure 3,
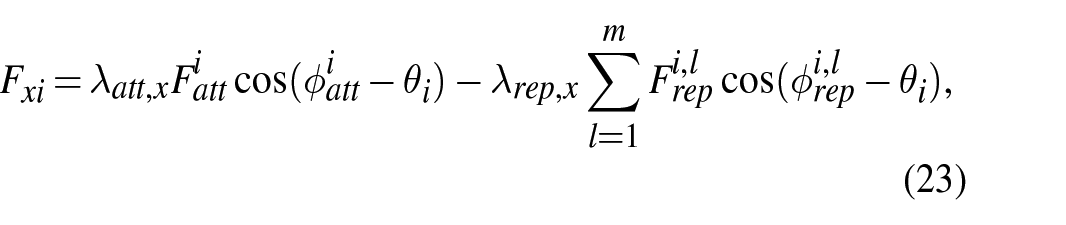
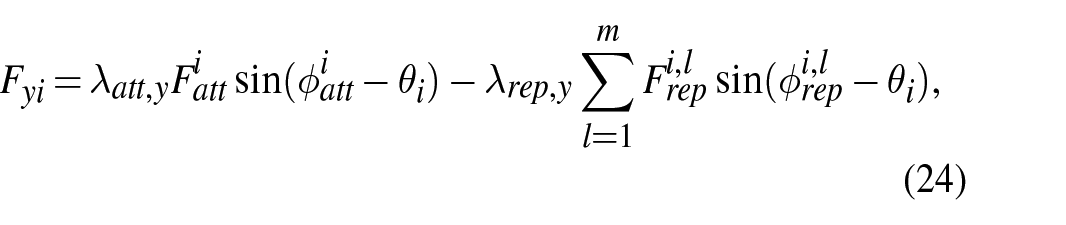
where

where
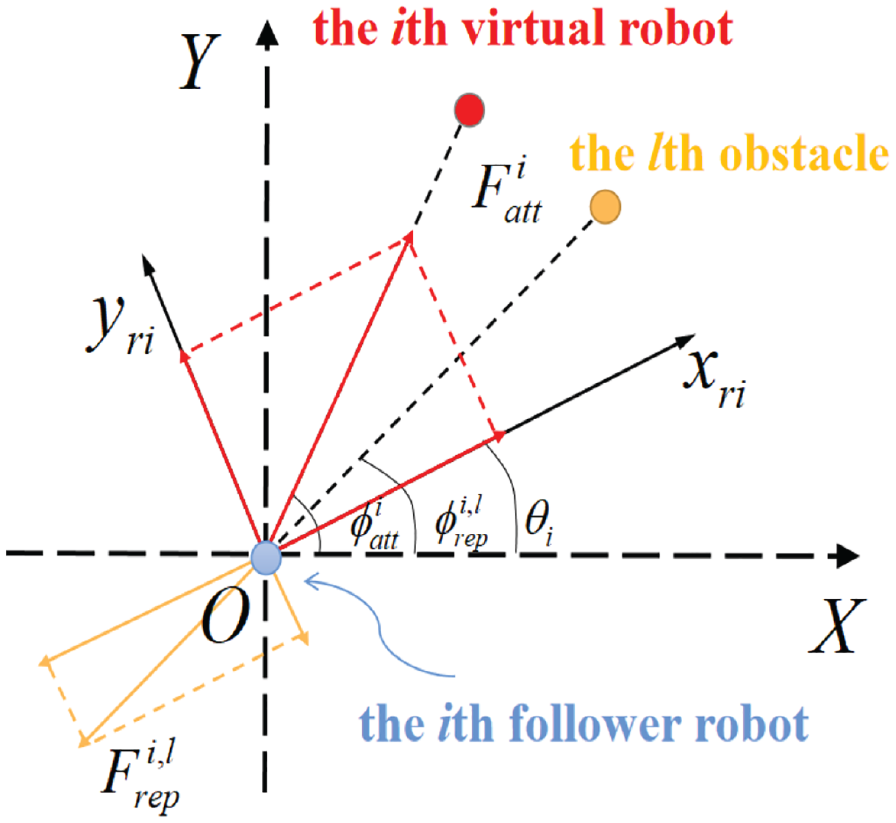
The decomposition of forces acting on the ith follower robot.
In order to coordinate formation and obstacle avoidance capabilities, we introduce a dynamic-gain structure as follows:
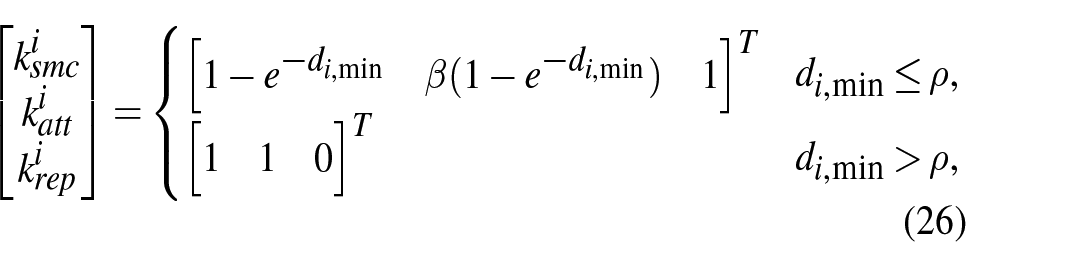
where
Otherwise, when
Hence, the dynamic-gain structure (26) enables the robots to make better autonomous decisions between maintaining formation and avoiding obstacles. Therefore, the integrated controller (27) in this paper is more reasonable than the controller in Pan et al. (2021), that is,i.e. the sum of the formation control input and the obstacle avoidance control input.
Evaluation and experimental results
The performance evaluation and experimental results of the proposed method are presented in this section to demonstrate its effectiveness. The MASs consisting of three robots are considered, and the communication topologies are shown in Figure 4.
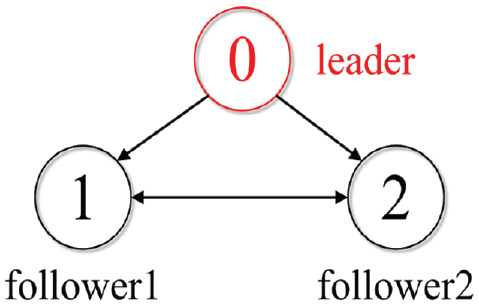
The communication topology.
Simulation
Firstly, the effectiveness of the proposed depletion model (15) will be demonstrated through simulation. The sliding mode controller parameters are set as follows:
The trajectories, tracking errors, and controller outputs of robots with (10) and (19) are shown in the left and right sides of Figure 5, respectively. By adopting (10), the controller output
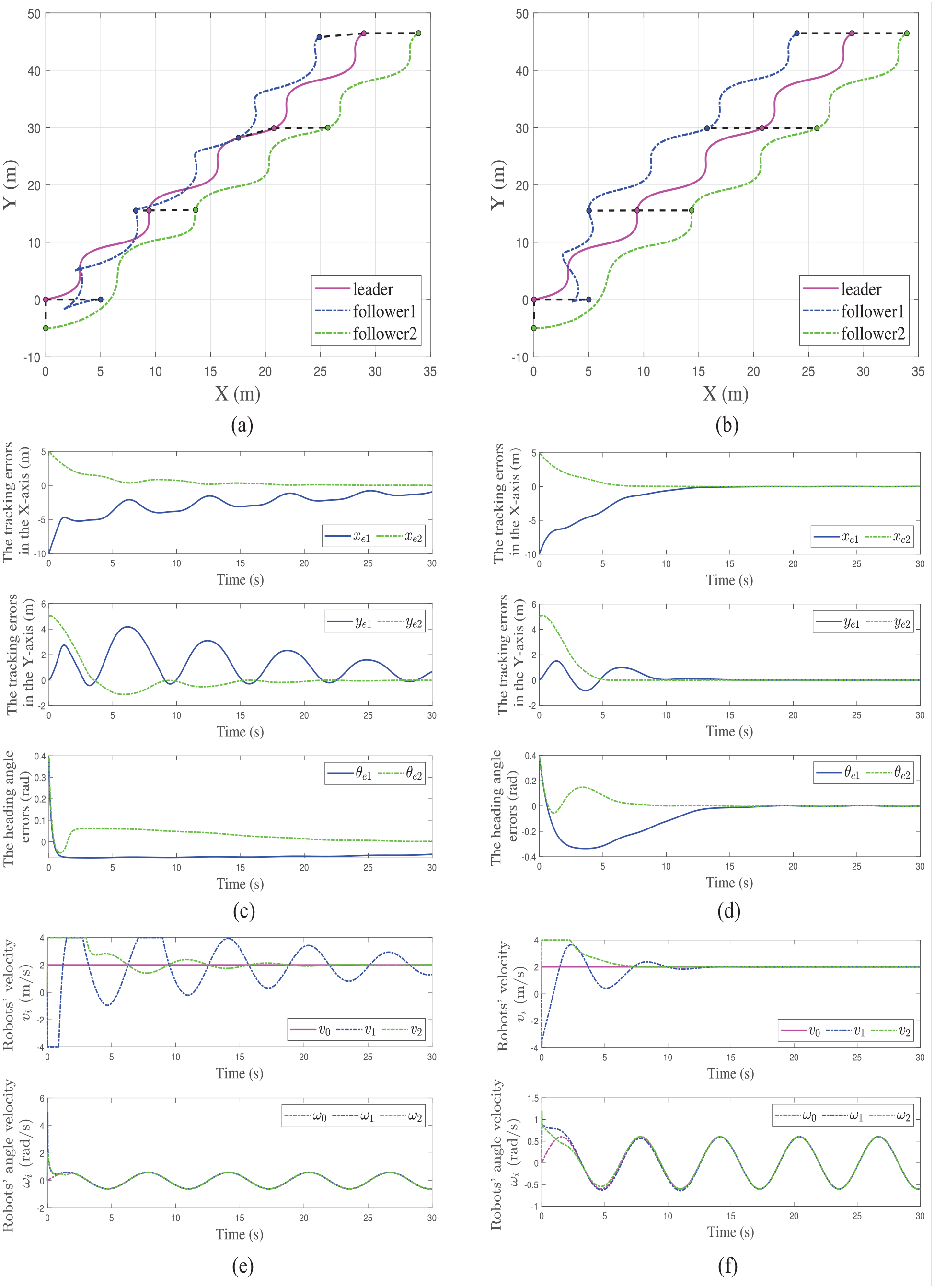
The simulation results with control law (10) (left) and with modified control law (19) (right): (a) the trajectories of robots with control law (10); (b) the trajectories of robots with modified control law (19); (c) the formation tracking error for each follower with control law (10); (d) the formation tracking error for each follower with control law (19); (e) the control input for each follower with control law (10); and (f) the control input for each follower with control law (19).
Experiment
To verify the proposed method in actual implementation, we will examine integrated controller (27) performance based on SCOUT MINI unmanned ground vehicles (UGVs) in obstacle environments.
The real formation experiments are carried out in an indoor obstacle environment. The diagram of the experimental system is illustrated in Figure 6. The four-wheeled UGVs SCOUT MINI (Zhang et al., 2023) is adopted as the experiment platforms. The leader’s trajectory and formation shape are preseted on a laptop (Intel Core i5, CPU@ 2.4 Hz equipped). The directed communication topology is imitated with a robot operating system (ROS Noteic). For the
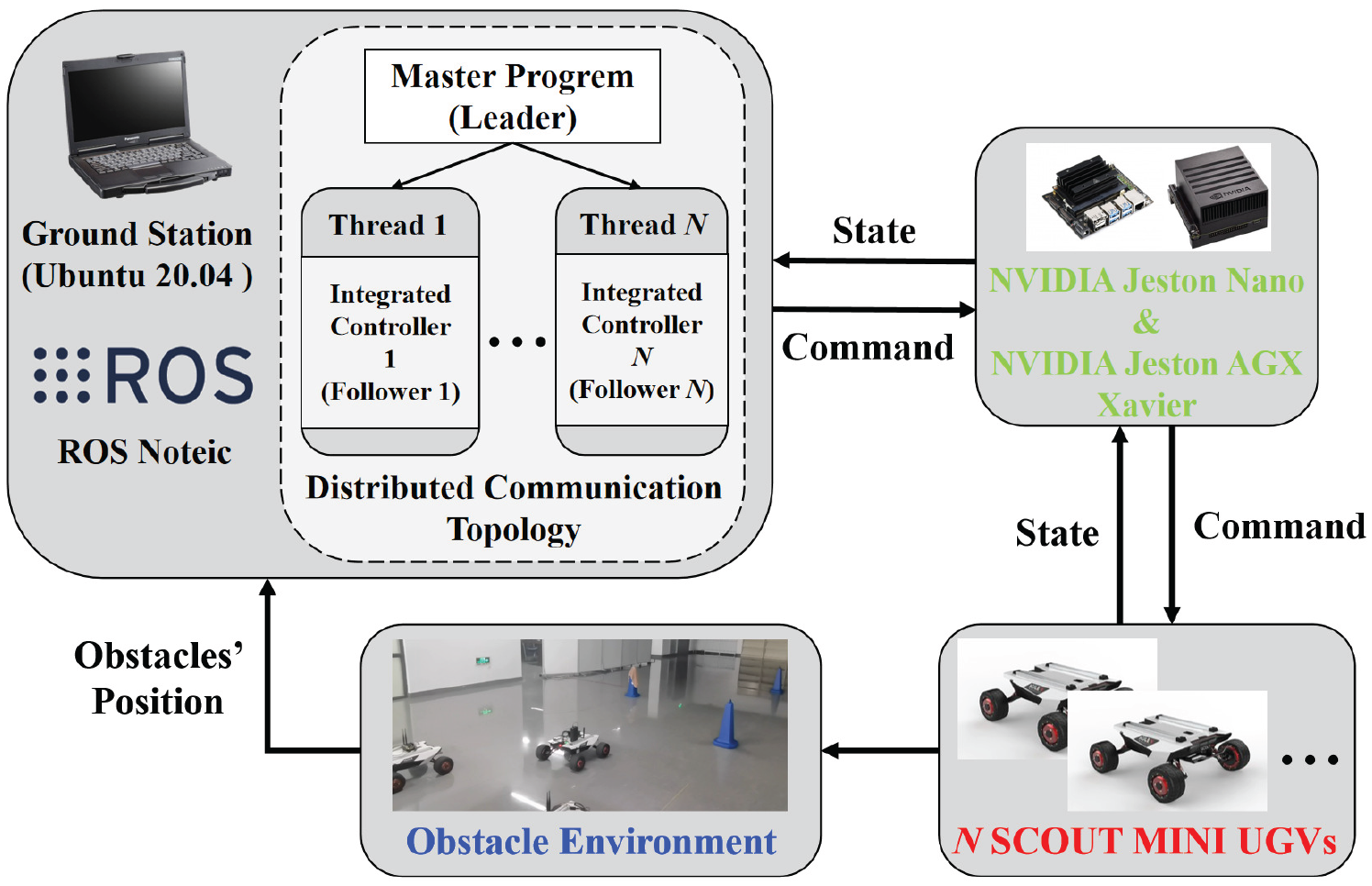
The diagram of experimental system.
The integrated controller parameters are set as follows:
The experiment results are displayed in Figure 7. It can be observed that UGVs can leave the formation to avoid obstacles and quickly return to the desired formation after obstacle avoidance is completed. Therefore, the integrated controller (27) is effective. The formation trajectories of obstacle avoidance experiments in different environments are shown in Figure 8, which further demonstrates the effectiveness and reliability of the proposed method.
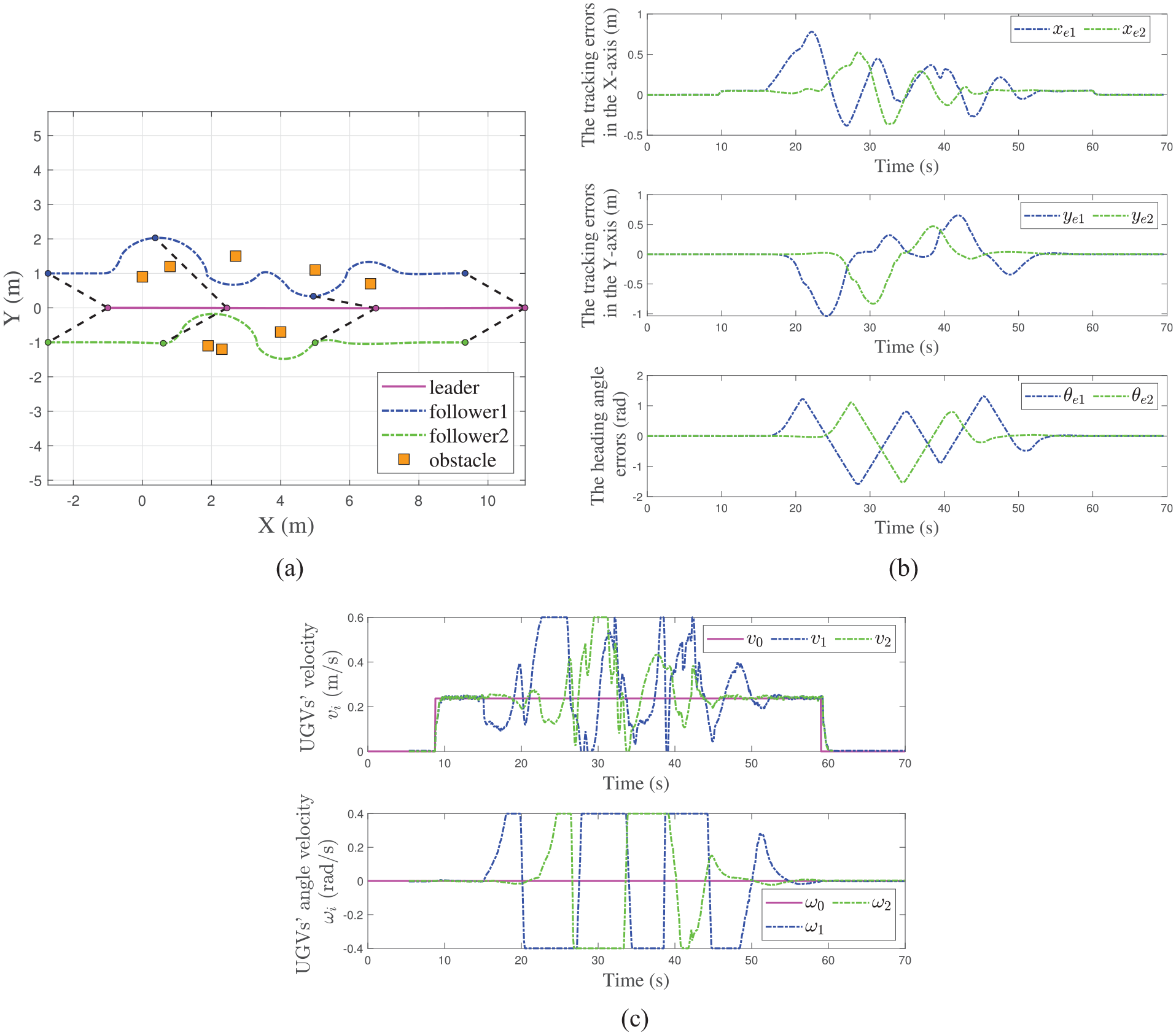
The experiment results in the obstacle environment with (27): (a) the trajectories of unmanned ground vehicles (UGVs) in the obstacle environment; (b) the formation tracking error for each follower; and (c) the velocities and angle velocities of UGVs.
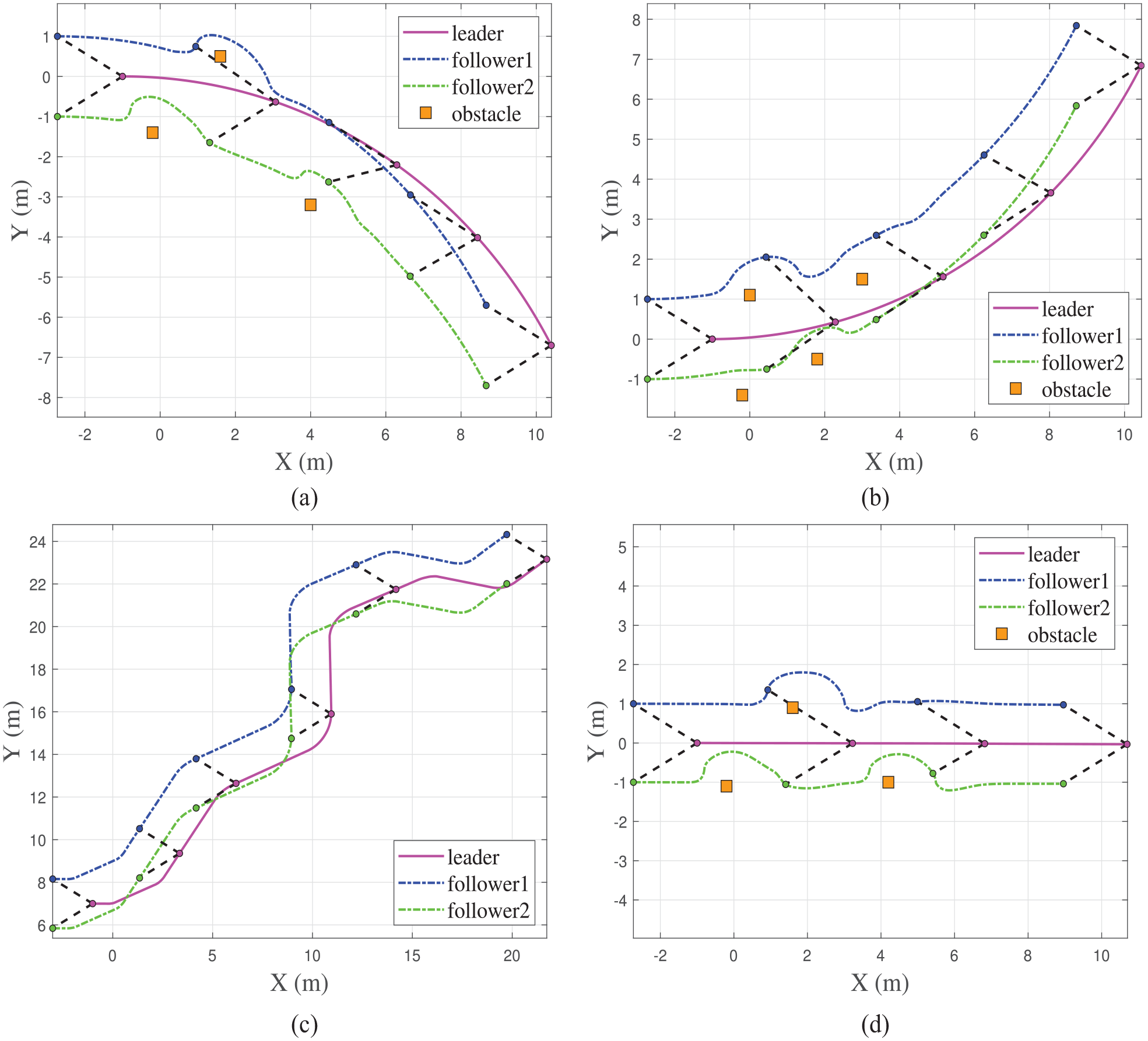
The formation trajectories in different obstacle environments: (a) Case I; (b) Case II; (c) Case III; and (d) Case IV.
Conclusion
In this paper, the formation obstacle avoidance problem has been investigated for multiple NWMRs. A novel integrated controller that combines a sliding mode controller and a force function is proposed, and a dynamic-gain structure is introduced to coordinate the outputs of the sliding mode controller and the force function. Then, the formation obstacle avoidance task is realized by the proposed integrated controller using minimal computational resources, which ensure good real-time performance. Simulation and experiment results demonstrate the effectiveness of the proposed collision-free formation control scheme. However, the formation approach in this paper only tracks the virtual robot’s trajectory, without employing distributed consensus theory in the controller design. Additionally, the designed controller does not account for uncertainties, such as unknown model parameters and external disturbances. The possible future work includes formation control for multiple NWMRs with unknown disturbances and cyber attacks.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work received financial support from the Science and Technology Small and Medium-sized Enterprise Innovation Capability Enhancement Project of Shandong Province (grant no. 2023TSGC0226), and the National Science and Technology Innovation Platform Open Project of China Academy of Railway Sciences (grant no. RITS2024KF01), and the Guangdong Basic and Applied Basic Research Foundation (grant nos. 2022A1515140126 and 2023A1515011172), and the Young and Middle-aged Science and Technology Innovation Talent of Shenyang (grant no. RC220485), and the Chunhui Plan Cooperative Project of Ministry of Education (grant no. HZKY20220424), and the Fundamental Research Funds for the Central Universities under grant no. N2426002.
Data availability statement
The data collected in this study are available from the corresponding author upon reasonable request.