
Abstract
This article investigates the finite-time dynamical tracking for autonomous underwater vehicles by introducing an impulsive communication scheme. More precisely, the communication of the autonomous underwater vehicles is conducted by the prescribed impulsive instants, which is more applicable for the underwater communication. Based on finite-time control theory and impulsive control theory, the tracking controller for each autonomous underwater vehicle is designed and sufficient conditions are developed for achieving the dynamical tracking cooperation. In the end, a simulation example is given to demonstrate the effectiveness and advantage of the proposed approach.
Introduction
With the fast development of computer and intelligence science, the autonomous underwater vehicles have received a lot of attention due to their wide engineering applications, such as sea investigation, environmental monitoring, and localization.1–5 Recently, cooperation control for autonomous underwater vehicles is designed to achieve complex underwater missions. Compared with a single autonomous underwater vehicle, cooperation control can obtain advantages in increasing the mission robustness and decreasing the cost. As a result, there have been many research works in tracking problems of autonomous underwater vehicles,6–8 which means that all the autonomous underwater vehicles can finally converge for tracking.
Note that for the control issues of multiple autonomous underwater vehicles, most existing literatures focus on the control design, which are mainly based on continuous-time assumptions. However, it should be pointed out that the continuous-time underwater communication model is not practical for the multiple autonomous underwater vehicles due to underwater communication limitations and would lead to design conservatism in the real-world applications.9–13 It is well known that an effective underwater communication scheme is the impulsive communication by underwater acoustic devices.14,15 Unfortunately, the impulsive communication method would increase the difficulty of the analysis and synthesis of control designs.
However, finite-time stability is becoming a hot research area due to its practical background. Different from traditional asymptotical stability with infinite time, finite-time stability can achieve the stability within a given time interval such that it is more applicable for real-world control problems.16–19 As a result, many remarkable results addressed the finite-time control problems can be found in the literature and references therein.20–23 Although there are some encouraging results for finite-time converging problems, the finite-time tracking cooperation problem of autonomous underwater vehicles still remains open and challenging.
Till now, there is little concern on the finite-time dynamical tracking cooperation of autonomous underwater vehicles with impulsive communication scheme, which motivates us for this article. In this study, we address the dynamical tracking cooperation for a group of leader and follower autonomous underwater vehicles under directed information exchange topology, which means that all the followers can track the leader in a prescribed finite time. Compared with the existing literature, the main contributions of our article can be summarized as twofold: (1) a novel finite-time dynamical tracking cooperation strategy for autonomous underwater vehicles with impulsive communication is introduced. (2) By developing an impulsive information exchange framework, tracking controllers are associated with impulse time sequences. Based on finite-time stability theory and impulsive system theory, tracking criteria are derived for ensuring that dynamical tracking cooperation can be accomplished over the finite-time interval. With the designed controllers, not only the communication scheme can be more practical but also the communication resources can be saved in comparison with most continuous-time communication approaches in the open papers.
The rest of our article is organized as follows. We first introduce the model of multiple autonomous underwater vehicles and formulate the tracking problem. Then, the main theoretical analysis is presented. Next, we provide numerical simulation results to show the effectiveness and the benefit of our design scheme. Finally, concluding remarks are drawn and future prospects of research are given.
Notation:
Preliminaries and problem formulation
Model of multiple autonomous underwater vehicles
Consider a group of

where



where





The reference frames of autonomous underwater vehicle.
In order to achieve dynamical tracking, a directed graph
Before proceeding, the following lemmas are introduced.
Lemma 1
If
Lemma 2
Consider the following system 26


Given two positive real numbers

Control objective
The control aim is to develop the tracking controllers for multiple autonomous underwater vehicles (equation (1)) so that in a finite-time interval


Main results
In this section, the impulsive communication scheme is first established. Then, the tracking controllers are designed based on the obtained results.
Define an impulsive sequence in
By defining

Consequently, the tracking controller for each autonomous underwater vehicle can be designed as


where
Define

where


Without loss of generality, assume that
Based on the designed control input, the following theorem is established.
Theorem 1
The dynamical tracking of the multiple autonomous underwater vehicles with



where


Proof
By Lemma 1, since
Construct the following Lyapunov function

where


The Dini derivative of
For

Then, one obtains

Consequently, we have

Then, there exists a constant

which yields

Next, for
Then, there exists a constant

if equation (21) holds.
For

which implies that

For
where
For

Repeating the same process, we have the following inequality

Furthermore, one has

such that if equations (21) and (22) hold, it can be obtained that

which means that system (17) is finite-time stable with respect to
Remark 1
The proposed finite-time impulsive tracking control method is more practical than the continuous-time cases since the underwater communication constrains are considered.
Remark 2
The developed control method can also be applied to switching communication topologies. Define a finite set of graphs
Numerical example
In the following section, we provide the simulation results to demonstrate the above results.
Example 1
Consider a group of five autonomous underwater vehicles with the same structure and parameters as

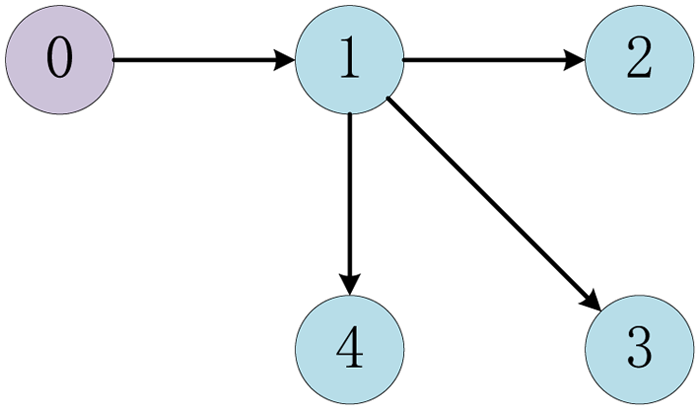
The communication topology.
The initial conditions are chosen as follows

The parameters are set as
It can be obtained by Theorem 1 that

Then, let

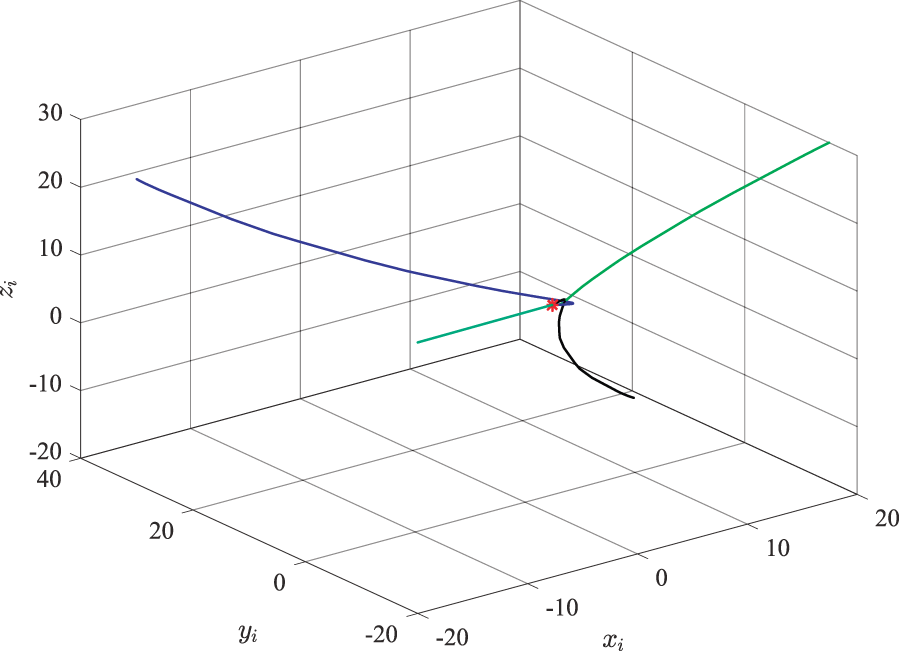
The generalized positions.

The generalized linear velocities.
Example 2
Another example is given with different structure and parameters as

The parameters are set as
The generalized positions.

The generalized linear velocities.
Example 3
Moreover, in order to show the advantages of our proposed impulsive communication scheme, the comparison between impulsive communication and continuous-time communication strategies is given. By choosing the same parameters in Example 1, the positions and the velocities of the tracking procedure with continuous-time communication strategy can be seen from Figures 7 and 8, respectively. It can be found that the proposed impulsive communication does not affect the tracking trajectory much compared with the continuous-time communication but is more practical and applicable for the underwater communication applications.

The generalized positions.

The generalized linear velocities.
Conclusion and discussions
We study the finite-time dynamical tracking of multiple autonomous underwater vehicles by developing an impulsive information exchange strategy. Based on the results of model conversion, the finite-time tracking conditions are derived. Furthermore, by constructing the Lyapunov function, we establish the sufficient conditions and design the distributed controllers for the leader and follower autonomous underwater vehicles. We present an illustrative example to show the efficiency of our findings. The developed results can be extended to the case with transmission delays in the information exchanges in the future.
Footnotes
Acknowledgements
The authors thank the editor and reviewers for their valuable suggestions which improved the paper.
Academic Editor: Zheng Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds for the Central Universities under Grant FRF-TP-15-115A1.