
Abstract
The aim of this study is to achieve the trajectory-tracking control of an autonomous underwater vehicle (AUV) in the presence of random system uncertainties and external current disturbances. A comprehensive model of an AUV is developed based on its kinematic and dynamic models. By means of appropriate transformations, a new system dynamic equation with arguments of positions and orientations is obtained for the controller design. Here, a proposed finite-time robust tracking control (FTRTC) based on a nonlinear sliding surface constructed using the tracking error which leads not only to trajectory-tracking of the AUV system with a finite-time convergence, but also a high level of robust performance. The stability of the overall system is assured via the Lyapunov stability criteria. Computer simulations conducted using the developed controller demonstrates the feasibility and effectiveness of the proposed FTRTC. Moreover, the simulation results showed that the proposed control scheme resulted in a high level of robustness of the closed-loop control system.
Keywords
Introduction
The underwater autonomous vehicles (AUVs) research and development has been in the rise for the past two decades due to increase in their utility and the advances made in many related fields, such as underwater robotics, artificial intelligence, and control. AUVs have become more compact and can carry fast computers, cameras, sonars, etc. which enabled them to carry out mission too hazardous and costly to be carried out by humans. AUVs are currently being used in many applications such as route surveillance, reconnaissance, inspection of underwater pipelines, 1 search an exploration, etc. For a successful execution of the aforementioned missions, trajectory-tracking control of AUVs is a basic and essential function in these types of applications. The performance of AUVs in the field depends on three interrelated research topics: vehicle architecture, dynamic and control of the vehicle, and perception and computer hardware. The focus in this paper is on the robust control of an AUV with finite-time convergence. Different approaches have been proposed in the literatures dealing with the control of AUVs including adaptive control,2–6 fuzzy control,7,8 back-stepping control,9,10 model predictive control,11,12 and finite-time extended state observer based sliding-mode control. 13 In the following paragraphs, some representative research findings on the control of AUVs will be discussed.
A constrained self-tuning controller (CSTC) was developed in Rout and Subudhi 14 to track desired waypoints of an AUV using line of sight guidance law. The equations of motion of the AUV were established using a Nonlinear Auto-Regressive Moving Average eXogenous (NARMAX) model where the parameters are updated by a recursive extended least square algorithm. The proposed algorithm was validated through computer simulations and it was concluded that the proposed control scheme was indeed effective in controlling the AUV. A different approach was proposed in Caharija et al. 15 where a 2- and 3-D integral line-of-sight (ILOS) guidance technique was developed for path following tasks of an underactuated AUV in the presence of constant irrotational ocean currents. Results from simulations and experiments validated the effectiveness of the proposed method. Peng et al. 16 proposed a path-following control scheme including guidance and control loops for an underactuated AUV subject to velocity and input constraints. Simulation results illustrated the effectiveness of the proposed method. A hand position point as output for a control strategy based on the input-output feedback linearization method was presented in Paliotta et al. 17 The presented strategy was able to deal with external disturbances and was proven to have global exponential stability. Recently, artificial intelligence (AI) has become a very hot topic of research and its application has propagated to many engineering fields including the control of AUVs. A deep interactive reinforcement learning technique to learn from both human and environmental rewards was proposed by Zhang et al. 18 for path following of an AUV. Experimental results showed that the AUV can converge faster than when using a deep Q-network (DQN) learner from only environmental reward. Furthermore, many other researchers developed finite-time convergence control techniques and readily available in the literature. For example, Ali et al. 13 developed finite-time extended state observer-based nonsingular fast terminal sliding-mode controllers for an AUV system. Similarly, Liang et al. 6 developed a finite-time velocity-observed based adaptive output-feedback tracking controller and validated the design with numerical simulations. Both of the aforementioned techniques led to fast convergence and prescribed performance.
The review of the related literature shows that the AUV system is complicated by large external current disturbances and high number of degrees of freedom; therefore, the challenge of any control technique is obtaining an accurate, practical, and mathematically usefully control design model of the AUV system. Usually, a less accurate control design model is obtained whose shortcomings are compensated for using a suitable robust control design technique. Therefore, it is proposed here to design the finite-time robust tracking control (FTRTC) to control the AUV system. To the best of our knowledge, the application of this kind of control scheme to an AUV system is novel and its efficiency will be demonstrated in the work presented here. A FTRTC with a high level of robustness is used to control the AUV subject to random uncertainties and external current disturbances to achieve finite-time convergence tracking performance. At first, a nonlinear sliding surface is designed so that the tracking error possesses finite-time convergence. The controller is designed based on new system dynamics equations after appropriate transformation based on the AUV’s kinematic and dynamic equations. Finally, the stability and robustness of the closed-loop performances are respectively validated via Lyapunov stability criteria and computer simulations. The main contributions of the work presented here are as follows: (1) Develop a comprehensive AUV model for the control design technique delineated in this manuscript; (2) Transform the system’s equation based on a combination and fusion of the kinematic and dynamic equations to obtain a control design model; (3) Design a finite-time robust trajectory tracking controller to mitigate the effect of the modeling uncertainties and external current disturbances; (4) Demonstrate the stability of the closed-loop system and validate the results through numerical simulations; (5) Provide discussions for the results for the closed-loop system performance and demonstrate the extent of its robustness, finite-time tracking performance, and possible applicability to other analogous nonlinear systems.
The rest of the paper is organized as follows: In Section 2, a mathematical model of an AUV and the problem formulation are given. The finite-time robust tracking control design is described in Section 3. The simulation results and discussions are presented in Section 4. Finally, some conclusions are made in Section 5.
Modeling of an autonomous underwater vehicle and problem formulation
A typical AUV system has six DOFs including three coordinate positions and three orientations in space. Moreover, the dynamic model comprises hydrodynamic features as well as uncertainties due to un-modeled dynamics which make the control design model highly nonlinear and very complex. In this section, general kinematic and dynamic models of an AUV are derived to study the viability of the proposed control scheme.
Kinematic model
The two coordinate frame systems of the AUV are illustrated in Figure 1: the inertial frame system


An AUV coordinate system.
where

where

Dynamic model
The dynamic model of the AUV can be expressed in a compact vector form 16 as:

where

where


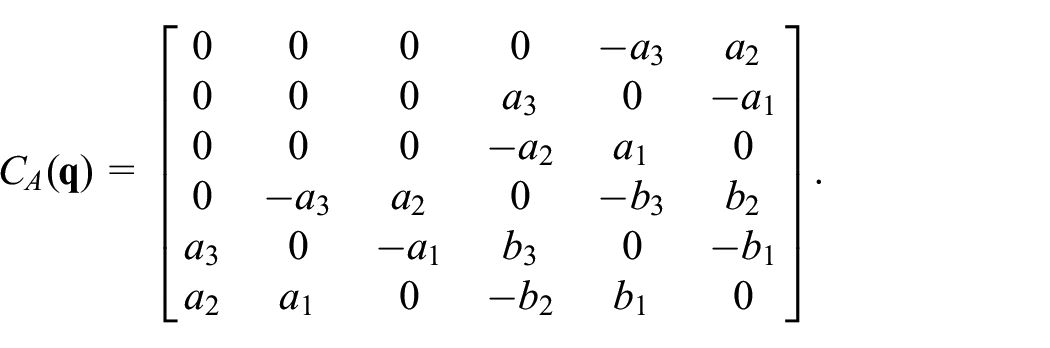
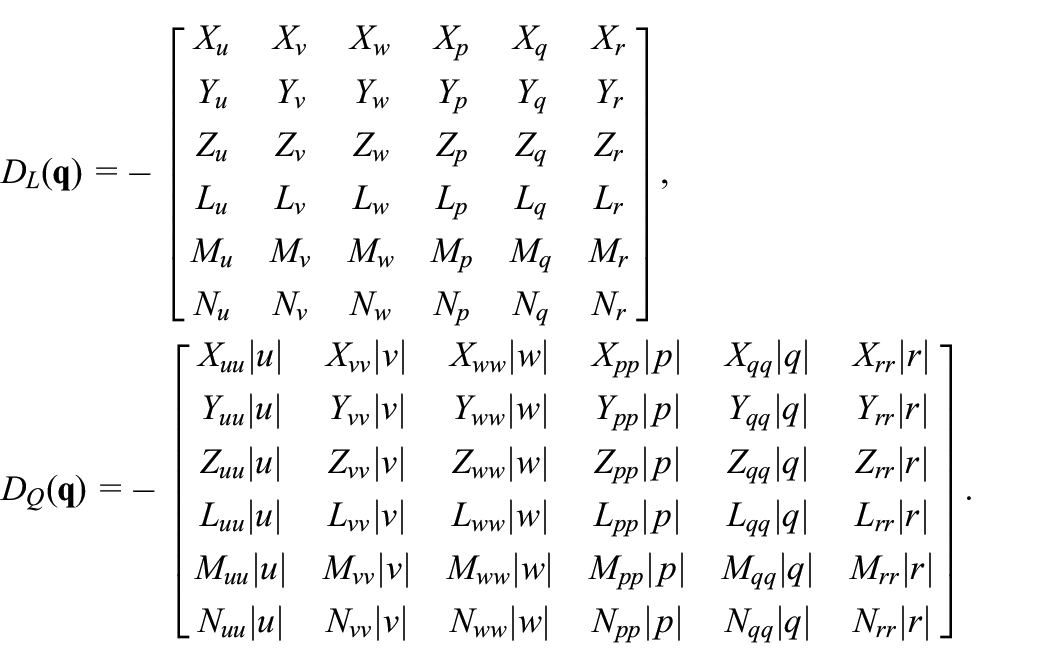
where


with
where


where
and

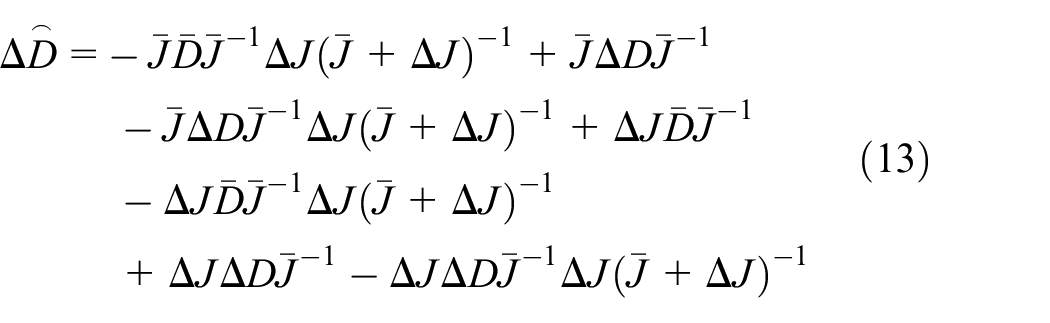
The nomenclature for the symbols of the entries in the above-mentioned matrices is described in the Supplemental Appendix. It is worth noting that the off-diagonal terms of the drag matrices are neglected because the hydrodynamic coupling is insignificant at low speeds and typically the buoyancy is trimmed so that it is approximately equal to the gravitational force. 13 To reflect a true situation of the AUV system and test the robustness of the proposed design, the system matrices are modified to include uncertainties as follows:

where
Overall system model and problem formulation
In this section, the control design model will be developed using the kinematic equations and developed in the previous section. Therefore, given the generalized coordinates vectors

Its derivative with respect to time becomes

Knowing that

Replace the expressions of

where
where







The control problem is to design a robust tracking control input

Overall control block diagram of an uncertain AUV.
Finite-time robust tracking controller design
In this section, the design process for the FTRTC will be described and applied the AUV system. First, let us define the concept of finite time convergence using the following

where
Next, the proposed FTRTC is designed to achieve the finite-time trajectory-tracking of the AUV system. To begin with, a nonlinear sliding surface is designed as

where

Based on the designed nonlinear sliding surface (17), the control input

where
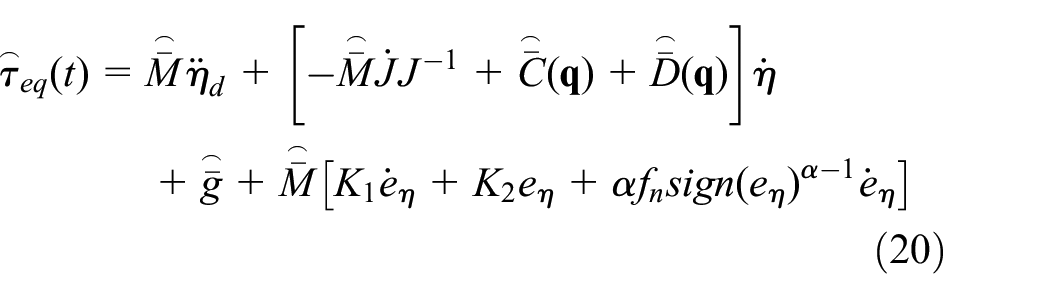

where

where
Simulations and discussions
To evaluate the performance and verify the robustness of the proposed control technique, simulations for a planned trajectory-tracking of an AUV in the presence of random uncertainties and external current disturbances are performed. In the simulations, the physical parameters of an AUV are taken from Steinke
19
and shown in Supplemental Table 1. The initial position and orientation of the AUV are taken as

Tracking response of the AUV subject to external current disturbances and without random uncertainties (the AUV moved from the water surface to a depth of 1.5m).
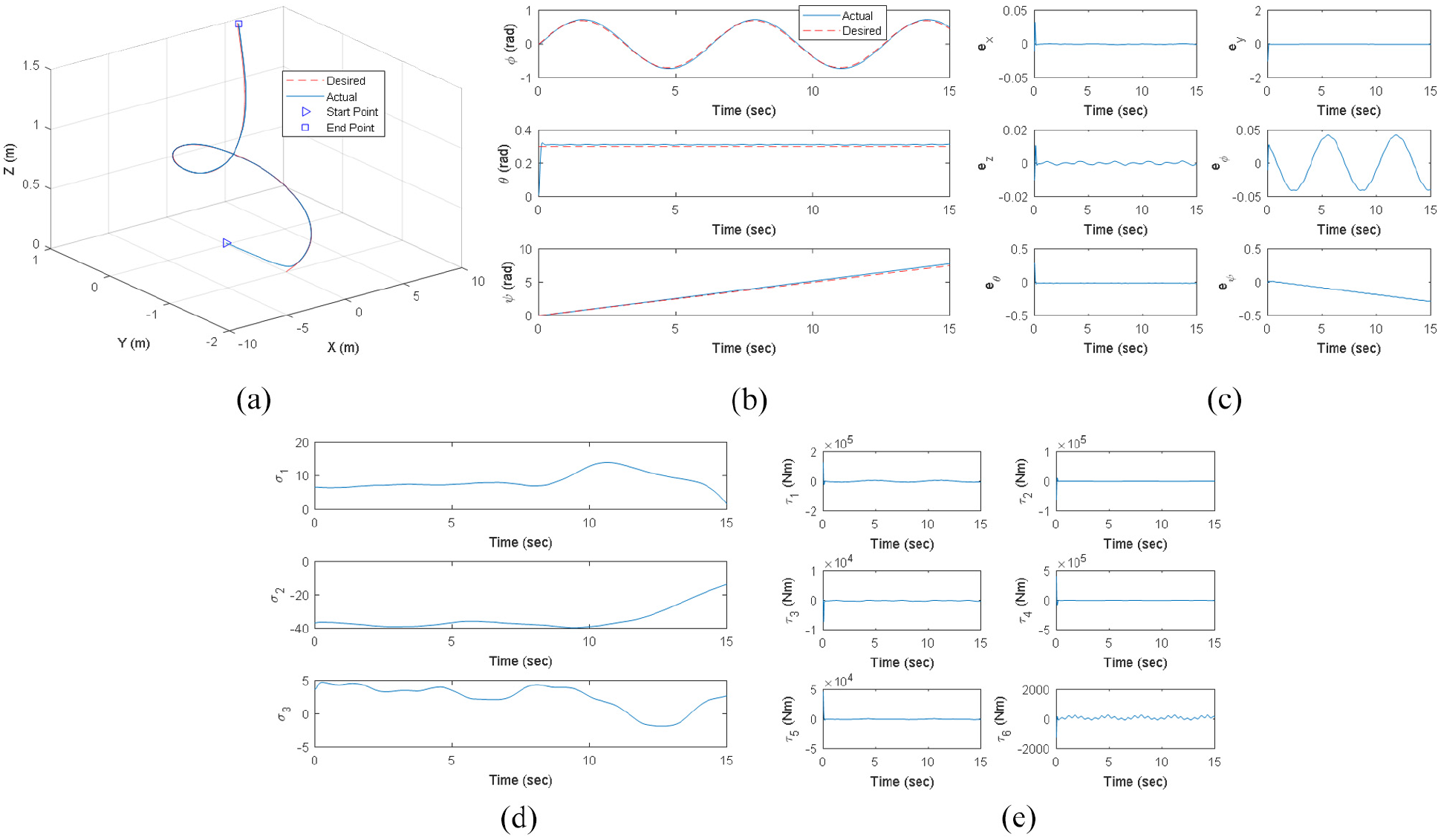
Responses of the AUV under continued current disturbances and a maximum 30% random uncertainty of system functions.
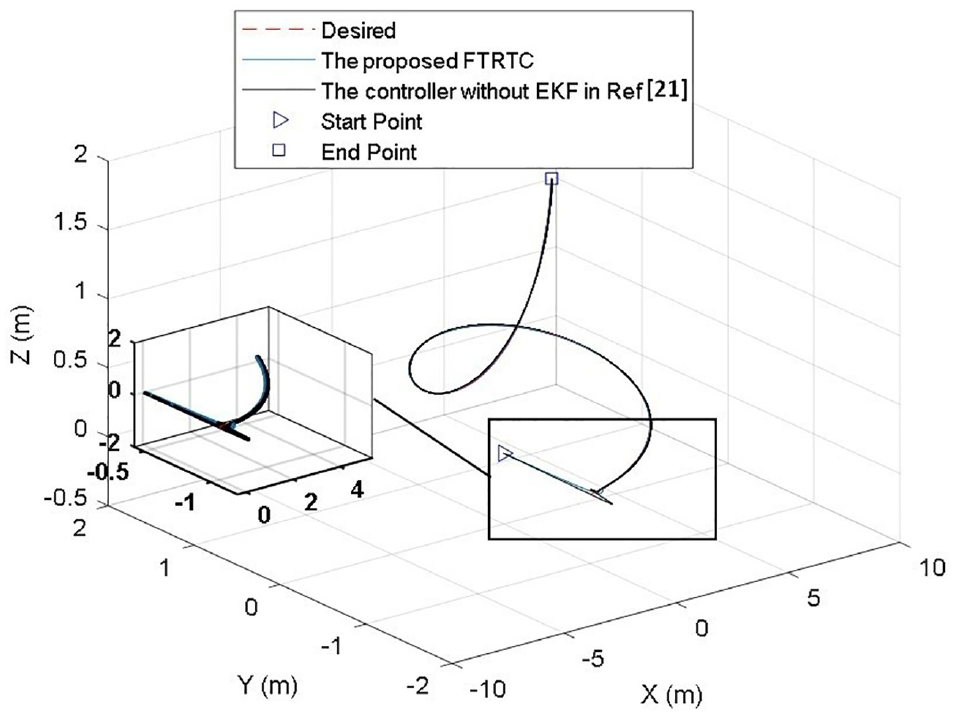
Tracking response comparison between the performance of the proposed FTRTC and the controller without EKF in. 21
Even though, there are similarities between the proposed controller and the ones described in Karkoub et al. 20 and Wu and Karkoub 21 ; there are significant differences among them which make the FTRTC suitable for the AUV system. First, the proposed FTRTC is based on the transformed AUV system only; however, those in Karkoub et al. 20 and Wu and Karkoub 21 are based on a hierarchical architecture which requires the control of a virtual input signal derived from the kinematic model. Second, the proposed sliding surface is nonlinear with a fractional-order term which has been proven to possess finite-time convergence. 22 This is extremely important point in real time applications to lessen the chances for performance degradation.
Conclusions
The work presented here deals with the control of an AUV system using a novel robust control technique known as finite-time robust tracking control (FTRTC). A comprehensive system model combining the kinematics and dynamics of an AUV is first developed and used in the design of FTRTC. The control design model is obtained through fusion of the kinematic model into the system dynamic equations of the AUV through appropriate transformations. Subsequently, an FTRTC scheme is designed based on a nonlinear sliding surface constructed using the tracking error system model. The overall system stability was demonstrated via Lyapunov stability criteria and it was shown through computer simulations that the proposed robust control scheme leads to successful trajectory-tracking by the closed-loop system. Moreover, it was shown that the FTRTC demonstrates a high level of robustness even in the presence of 30% random uncertainty in system parameters and external current disturbances.
Supplemental Material
sj-pdf-1-ade-10.1177_16878140211053429 – Supplemental material for Finite-time robust tracking control of an autonomous underwater vehicle in the presence of uncertainties and external current disturbances
Supplemental material, sj-pdf-1-ade-10.1177_16878140211053429 for Finite-time robust tracking control of an autonomous underwater vehicle in the presence of uncertainties and external current disturbances by Hsiu-Ming Wu and Mansour Karkoub in Advances in Mechanical Engineering
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The corresponding author would like to thank the financial support from Ministry of Science and Technology of Taiwan, R. O. C. with Grant No. MOST 110-2221-E-027-085.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.