This work shed light on the motion of a symmetric rigid body (gyro) about one of its principal axes in the presence of a Newtonian force field besides a gyro moment in which its second component equals null. It is assumed that the body center of mass is shifted slightly relative to the dynamic symmetry axis. The governing equations of motion are investigated taking into account some initial conditions. The desired solutions of these equations are achieved in framework of the small parameter method. The periodic solutions for the case of irrational frequencies are investigated. Euler’s angles have been used to interpret the motion at any time. The geometrical representations of the obtained solutions and the phase plane schemas of these solutions are announced during several plots. Discussion of the results is presented to reinforce the importance of the considered gyro moment and the Newtonian force field. The significance of this problem is due to the framework of its several applications in different industries such as airplanes, submarines, compasses, spaceships, and guided missiles.
The search for the analytical solutions of the rigid body problem about one of its fixed points is an important task in analytical mechanics. Generally, these kinds of problems required more complicated techniques because the governing system consists of six nonlinear differential equations in addition to three famous first integral.1,2 It is known that, in order to obtain the solutions of like systems exactly, we need an algebraic complementary fourth first integral. Many researchers focused their works to realize such integrals,3–8 whether in the case of gravitational force or in the presence of a Newtonian field or in the case of the motion under the action of a magnetic field or even under the effectiveness of a potential one. These trials require some restrictions on the center of mass and on the main moments of inertia.
The periodic solutions for the rotational motion of a rigid body under the influence of a Newtonian field of force were obtained in Ismail9 using Krylov-Bogoliubov-Mitropolski technique.10 The obtained solutions have singular points when the nature frequency equals integer numbers or its multiple inverse. Some of these singularities were treated in Ismail.11
In Amer et al.,12 the same previous technique is modified to obtain the required solutions for the governing system of motion for a heavy solid spinning about one of the main axes of ellipsoid of inertia with high angular velocity. The rotation of this body is considered under the effectiveness of the gyro moment when its first component vanishes. The obtained solutions have no singular points at all because the authors used another frequency which differs from the natural frequency by a small quantity.
The exact solutions for the rigid body motion in the presence of external torque are presented in Romano13 and extended in Romano14 when two principal moments of inertia are equal to each other and the body moves under a constant external moment. Several publications have investigated the approximate solutions for the rigid body problem.15–20 Longuski and colleagues15,16 obtained the analytical approximate solutions using asymptotic and series expansion when the torque is equal a constant and when varies with time. Also, the rotational motion of a body undergoes a constant torque which was investigated by Livneh and Wie.17 The solutions of this problem close to the equilibrium points undergo a Newtonian field of force are achieved in El-Sabaa.20
The method of small parameter10,21 is used to investigate a class of solutions for special cases in Demin and Kiselev.22,23 This advantage of the technique is used in Elfimov18 to search for the existence of periodic solutions for the motion of a rigid body. The author supposed that the center of mass is slightly shifted from a dynamically symmetric axis. This problem was treated in Amer19 when the body rotates under the action of nonzero components of the gyrostatic moment vector.
The task of this work is to investigate the rotational motion of a symmetric rigid body (gyro) under the effectiveness of a Newtonian field of force and undergo the gyrostatic moment vector in which its second component equals zero. The governing equations of motion are investigated after the imposition that the body center of mass is shifted slightly through a small quantity relative to the dynamical axis of symmetry in which this quantity is utilized to introduce a small parameter. The desired solutions of these equations are achieved applying the small parameter method of Poincaré, taking into account some certain initial conditions. The periodic solutions for the case of irrational frequencies are studied. These solutions are interpreted geometrically in framework of Euler’s angles to estimate the motion during any period of time. Interpretation and discussion of the results are presented to show the perfect effect of both the Newtonian field and the gyrostatic moment on the mentioned motion. Applications of this problem have a wide range in different industries, because the rigid body is considered as an appropriate model of numerous applications in life such as manipulators, spacecrafts, submarines, and compasses.
Description of the problem and the proposed method
Let O be a fixed point of a symmetric rigid body (gyro) about which the body rotates and takes place under the activity of a Newtonian field of force, arises from an attracting center subjected at point , and a gyrostatic moment acting about the axes of rotation. Bearing in mind that the second component vanishes and the other two ones are different from zero. Let OXYZ be a fixed frame, in which lies on the downward Z-axis at a distance and another one Oxyz, fixed in the body and moving with it in which its axes are directed along the main axes of the gyro at O (see Figure 1).
Symmetric rigid body diagram.
One of the important aspects is to obtain the equations of motion of this problem. Euler–Poisson’s equations provided us with these equations. Moreover, the governing equations of motion can be obtained from the basic equation of the angular momentum which states that the rate of change of the angular momentum with respect to time t of a rigid body equals to the moments of all external forces acting on it, and from the directional cosines of the Z-axis with respect to the principle axes. So, the governing equations of motion have the following form1
where represents the main moments of inertia, are the appropriate components of the body center of mass, are the components of angular velocity, denote the components of the unit vector along Z-axis direction into the axes of inertia, the over dots denote the derivatives with respect time t, M is the gyro’s mass, g is the gravitational acceleration, and , in which is the constant of the attracting center .
Moreover, it is predicted that the other equations of motion can be obtained from equation (1) by the cyclic change of the symbols , , and .
After some algebraic manipulations and with the aid of the previous equations, one obtains the three first integrals, namely, energy integral, area integral, and geometric ones in the following form1
where , and are the initial values of their corresponding variables.
Taking into consideration that the body is symmetric about one of its principal axes, the second component of gyrostatic moment equals null, and the center of mass is shifted slightly (to some extent) relative to the axis of dynamical symmetry. This small displacement has been used to introduce the small dimensionless parameter . Consequently, to visualize the motion, we consider that
in order to obtain the following dimensionless quantities
Inserting the previous assumptions and the substitutions (3) into the system of equations (1) and the first integrals (2), we obtain
and
In order to reduce system (4) to another appropriate one, and can be obtained from the third and first equations of (5) as
where
where and are the initial values of and respectively.
Now, using equations (6) and omitting and from system (4), we obtain another system consisting of four nonlinear first-order differential equations, and then use the following new substitutions19
to transform system (4) to the following more convenient form
where
It is worthwhile to note that with a suitable selection of , the division of the frequency over can be considered as a rational number. This elucidates that the solution of the generating system of system (9) is then periodic with period . Let us reformulate the problem that determines -periodic solutions of system (9) with a very small value of , which for would transform to a solution of period of system (9) at . So, let us consider , where is a function of that can be determined. The problem is now transformed to determine the periodic solutions with period to the following system
where
Differentiating system (11) with respect to T and using again system (11), one obtains another one which consists of four differential equations from second order. In view of the resulted equations, one can seek the desired periodic solutions in the form
besides the following initial conditions
Here, are the unperturbed terms in and we seek as functions of such that it equals zero when vanishes.
From the inspection of system (9), it is clear that the periodic solutions of this system, which correspond to the -periodic solutions of system (11), are of period which for reduces to the period of the generating system . We assume that . In harmony with the small parameter method, the initial conditions can be varied to correspond with the arbitrary constants of solutions of the generating system. We also vary to have periodic solutions for (13).
Substituting , and from (8) into (7), one gets and in terms of and .
Making use of equations (8) and (10), reformulate in short forms as follows
where
Under the present circumstances, eliminate the independent terms of in to obtain the following form
where represents a matrix of constant coefficients . Moreover, to obtain these coefficients, it is necessary to determine and . For this purpose, using the forms of , and equations (7) to obtain and . Consequently, one obtains easily (see Appendix 1).
Substituting from the desired solutions (13) into system (11), equating the coefficients of like powers of and then the coefficients can be determined by the following equations
in addition to the initial conditions . Here, are the known functions if is determined for .
For , substituting (12) into system of equations (17), equating the coefficients of equal powers of and then differentiating the resulting equations with respect to T, one obtains equations determining in the following form
where
Having , one gets the solutions of system of equations (18) directly in the following form
It is remarked in Malkin21 that for the solutions (13) to be -periodic, it is necessary and sufficient to realize the following periodicity conditions
where are considered as functions of , and . Equalities (24) that determine , and are not independent due to the existence of the first integral in system (11).18 Moreover, it is predicted that the third condition is a corollary of the remaining if . According to the statement in Arkhangelskii,24 it is convenient to look one of the or as a constant, and one of the as a function of that vanishes when .
Reducing equalities (24) by , and then equating the terms of zero powers of with zero, to yield the necessary periodicity conditions
It should be noted that if is equal to either of 2, 1/2, 1, or −1, the expressions of , and do not vanish and take the following forms
Let and satisfy system (26), consider Jacobi’s matrices of in terms of and calculate both of for , and in terms of with . The calculation of the second matrix does not include derivative with respect to . Then, one can set . Since , and appear in the solutions in the form of related sums, the considered matrices are the same and can be denoted by J. The solutions of (24) permit the next case for existence of the periodic solutions.
The case when is irrational
The goal of this section is to investigate the periodic solutions when is irrational. It is remarked that this case has periodic solutions if ( is arbitrary),18 and
are satisfied. The solutions of equalities (24) have series form of powers of for , and and vanish when tends to zero ( can be considered equal to zero). Under the present circumstances, the periodicity conditions become
Taking into account (28), the periodic solutions , and at become
with the frequency .
Making use of the second integral in (5) and conditions (14), we get
where are functions of , and that can be obtained easily.
On the use of equations (28) and (29), we obtain directly and . The calculations for reveal that it is of the order .
Making use of (8), (13), (19)–(22), and (28), one obtains
It is worthwhile to note that, when the attracting center R tends to infinity and , the gyroscopic motion studied by Sansaturio and Vigueras25 is obtained. Also, when R tends to infinity beside , the solution given in Elfimov18 is obtained. So, our solution is considered as a generalization of some previous works. Therefore, the present results are in a good agreement with the known previous results of Elfimov18 and Sansaturio and Vigueras.25
Geometrical interpretation
The scope of this section is to investigate the geometrical interpretation of motion in framework of Euler’s angles in terms of to determine the motion of the gyro at any instant. For this task, the expressions of Euler’s angles , and take the following forms11
where the over dot denotes the derivative with respect to time t. Substituting from the obtained solutions (32–35) into the previous equations (36), we get the Euler’s angles , and in the following form
Consequently, these formulas reveal that the previous attained expressions of Euler’s angles hinge on three arbitrary constants , and .
Simulation and results
The goal of this section is to investigate the graphical representations of the obtained solutions to show the variation of time t on the solutions p and q and to study the stability of these solutions during the motion. So, in order to investigate this purpose, we consider the following data of the gyro
Figures 2 and 3 show the graphical representations for the attained solution p with time t when the distance between the fixed point O and the attracting center (i.e. R) equals 800 m. In Figure 2, the first component of the gyrostatic moment equals and the value of the third component of the same moment equals . Conversely in Figure 3, changes from to through the value and .
Variation of the solution p via t at and when equals and .
Variation of the solution p via t at and when equals and .
A conclusion that may be written here is that when takes the values (i.e. increases) with the stationary values of R and , the standing waves with lower frequency are obtained as seen in Figure 2. However, when becomes stationary besides R with the variation in the values of , the traveling waves with higher frequency are produced as evident in Figure 3. It is important to note that the amplitudes of the waves increase and the number of oscillations remains unchanged with the increasing as shown in Figure 2. Moreover, one can observe from Figure 3 that the amplitudes and the number of waves increase with the increasing values of .
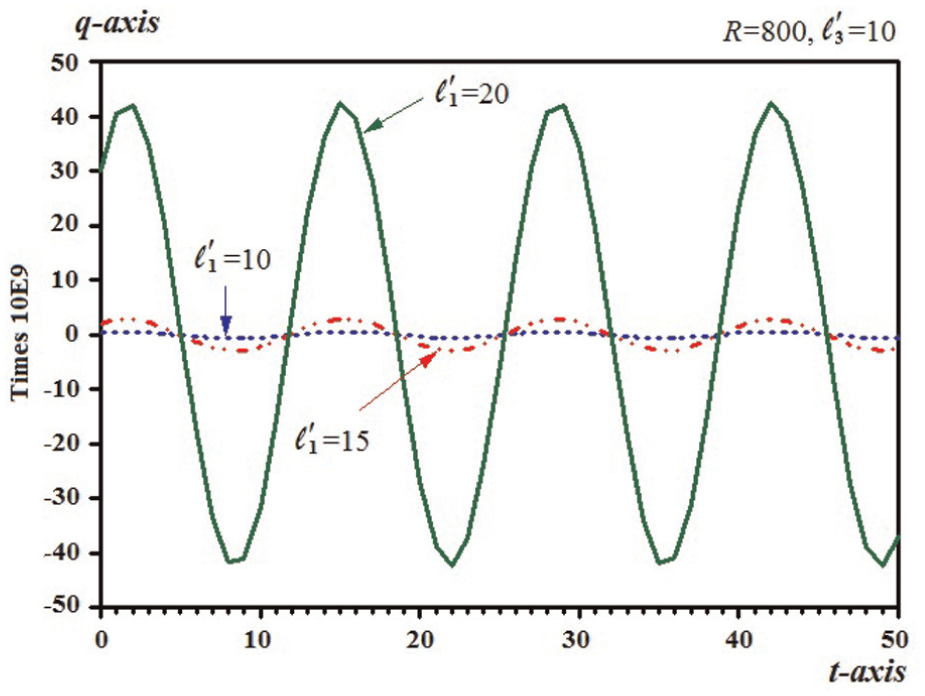
An inspection of Figures 4 and 5 shows the variation of the solution q against time t with the same value of R. In Figure 4, takes the values when becomes constant, that is, equal to . As indicated in Figure 5, is equal to and takes the values and .
Variation of the solution q via t at and when equals and .
Variation of the solution q via t at and when equals and .
When Figure 4 is generally compared with Figure 5 we observe that the amplitudes of the standing waves increase with the increasing values of (see Figure 4). On the other side, the number of traveling oscillations and the amplitude of the waves increase with the increasing as seen in Figure 5. This elucidates that the corresponding values of q increases which is in agreement with the increasing p as seen in these figures. In other words, this conclusion can be physically interpreted that there is an increasing of the velocity of the gyro and consequently the kinetic energy increases.
However, when the distance between the fixed point and the attracting center increases, rather different plots are drawn. Figures 6 and 7 represent the influence of increasing R on the solutions p when and , respectively. On the other side, Figures 8 and 9 sketch the influence of increasing R on the solutions q when and , respectively, with the same considered data of the other parameters in the previous figures.
Illustration of the variation of the solution p versus t at and when R equals 600, 800, and 1000 m.
Illustration of the variation of the solution p versus t at and when R equals 600, 800, and 1000 m.
Illustration of the variation of the solution q versus t at and when R equals 600, 800, and 1000 m.
Illustration of the variation of the solution q versus t at and when R equals 600, 800, and 1000 m.
An inspection of (Figures 6 and 8) and (Figures 7 and 9) shows that broadly speaking, when R increases and takes specifically the values 600, 800, and 1000 m, both the standing and progressive waves are obtained through three curves with shorter wavelength and higher frequency. Also, it is clear that both the number of oscillations and the amplitudes of the waves increases with the increasing distance R (see Figures 6 and 8). However, it is not difficult to conclude from Figures 7 and 9 that when R increases, the amplitude of the waves decreases and the number of ripples increases. This indicates the good effectiveness of the gyrostatic moment on the motion. The variation of the solutions between increasing and decreasing gives an indication of increasing or decreasing energy of the gyrostat which can be used in industrial applications.
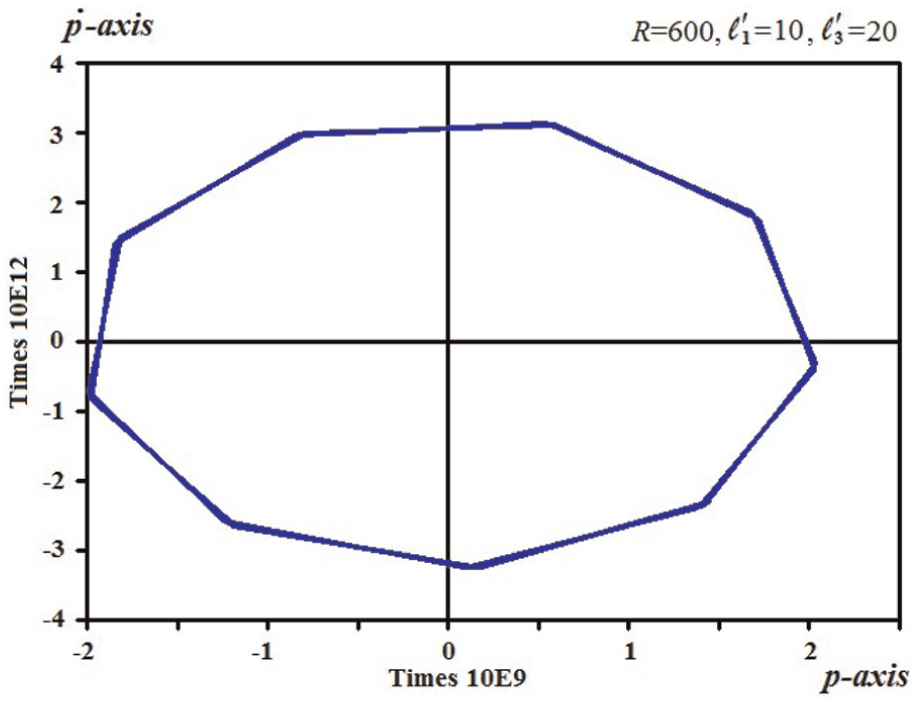
The most interesting case is to study the phase plane of the obtained solutions through some diagrams. These diagrams have been produced by drawing the solution against its first derivative. Some of these plots with different values of , and are given in Figures 10 and 11 for the solution p and in Figures 12 and 13 for the solution q. The phase plane plots give an indication about the system is free of chaos.
The phase plane diagram of the solution p when , and .
The phase plane diagram of the solution p when , and .
The phase plane plot of the solution q when , and .
The phase plane plot of the solution q when , and .
Conclusion
A conclusion that may be constructed here is that the small parameter method of Poincaré is applied to obtain the approximate analytic periodic solutions for the mentioned problem up to the fraction order 3/2 of the small parameter . The obtained results of this article are in good agreement with Elfimov18 (for the uniform field case, that is, and ) and with Sansaturio and Vigueras25 when R tends to infinity and . So, our periodic solutions (32–35) can be considered as a generalization of these works. The achieved solutions are anatomized geometrically with the aid of the Euler’s angles to portray the motion at any instant of time. The standing waves with larger wavelength having some nods are produced when the first component of the gyrostatic moment takes different values with the stationary values of other parameters. Moreover, if takes different values, with the constant values of other parameters, the traveling waves are produced with shorter wavelength besides increasing the amplitude of the waves. Consequently, the energy of the gyro increases, which has a significant impact in industrial applications. This is due to the variation of the gyrostatic moment components, which elucidates the importance of these components. The results also indicate that when the distance R between the fixed point and the attracting center increases, the progressive waves are obtained and the wavelength of these waves decreases. Then, the number of oscillations and the amplitudes increases or decreases leading to increasing or decreasing in the velocity of the gyro and therefore increasing or decreasing in the gyro energy occurred. It reinforces the importance of existence of the Newtonian force field and the change in the distance R. The good effects of the two components of the gyrostatic moment vector and the Newtonian force field, on the considered problem are obvious from the graphical representation. Some phase plane diagrams are plotted for the attained solutions.
Footnotes
Appendix 1
where
Appendix 2
Academic Editor: Yangmin Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
References
1.
LeimanisE.The general problem of the motion of coupled rigid bodies about a fixed point. Berlin: Springer, 1965.
2.
BeletskiiVV. New investigations of motion of an artificial satellite about its center of mass. In: MorandoB (ed.) Dynamics of satellites. Berlin; New York: Springer, 1969, pp.194–206.
3.
KharlamovaEI.About the motion of a heavy rigid body with a fixed point in a central Newtonian field of force. Izv Sibirsk Otd Akad Nauk SSSR1959; 6: 7–17.
4.
ArkhangelskiiIA.On the algebraic integrals in the problem of motion of a rigid body in a Newtonian field of force. J Appl Math Mech1963; 27: 247–254.
5.
YehiaHM.A new integrable problem in the dynamics of rigid bodies. Mech Res Commun1998; 25: 381–383.
6.
YehiaHM.On certain integrable motions of a rigid body acted upon by gravity and magnetic fields. Int J Nonlinear Mech2001; 36: 1173–1175.
7.
BurovAA.First integral in the problem of motion of a heavy rigid body about a fixed point under internal constraint. J Appl Math Mech2005; 69: 195–198.
8.
YehiaHM.New solvable problems in the dynamics of a rigid body about a fixed point in a potential field. Mech Res Commun2014; 57: 44–48.
9.
IsmailAI.On the application of Krylov-Bogoliubov-Mitropolski technique for treating the motion about a fixed point of a fast spinning heavy solid. ZFW1996; 20: 205–208.
IsmailAI.Treating a singular case for a motion of a rigid body in a Newtonian field of force. Arch Mech1997; 49: 1091–1101.
12.
AmerTSIsmailAIAmerWS.Application of the Krylov-Bogoliubov-Mitropolski technique for a rotating heavy solid under the influence of a gyrostatic moment. J Aero Eng2012; 25: 421–430.
13.
RomanoM.Exact analytic solution for the rotation of a rigid body having spherical ellipsoid of inertia and subjected to a constant torque. Celest Mech Dyn Astr2008; 100: 181–189.
14.
RomanoM.Exact analytic solutions for the rotation of an axially symmetric rigid body subjected to a constant torque. Celest Mech Dyn Astr2008; 101: 375–390.
15.
LonguskiJM.Real solutions for the attitude motion of a self-excited rigid body. Acta Astronaut1991; 25: 131–139.
16.
LonguskiJMTsiotrasP.Analytic solution of the large angle problem in rigid body attitude dynamics. J Astronaut Sci1995; 43: 25–46.
17.
LivnehRWieB.New results for an asymmetric rigid body with constant body-fixed torques. J Guid Contr Dynam1997; 20: 873–881.
18.
ElfimovVS.Existence of periodic solutions of equations of motion of a solid body similar to the Lagrange gyroscope. J Appl Math Mech1978; 42: 251–258.
19.
AmerTS.On the motion of a gyrostat similar to Lagrange’s gyroscope under the influence of a gyrostatic moment vector. Nonlinear Dynam2008; 54: 249–262.
20.
El-SabaaFM.About the periodic solutions of a rigid body in a central Newtonian field. Celest Mech Dyn Astr1993; 55: 323–330.
21.
MalkinIG.Some problems in the theory of nonlinear oscillations (AEC-tr-3766). Oak Ridge, TN: U.S. Atomic Energy Commission, Technical Information Service, 1959.
22.
DeminVGKiselevFI.On periodic motions of a rigid body in a central Newtonian field. J Appl Math Mech1974; 38: 201–204.
23.
DeminVGKiselevFI.A new class of periodic motion of a rigid body with one fixed point in a Newtonian force field. Dokl Akad Nauk SSSR1974; 214: 270–272.
24.
ArkhangelskiiIA.Periodic solutions of quasilinear autonomous systems which have first integrals. J Appl Math Mech1963; 27: 551–557.
25.
SansaturioMEViguerasA.Translatory-rotatory motion of a gyrostat in a Newtonian force field. Celestial Mech1988; 41: 297–311.