
Abstract
The three-axis attitude tracking manoeuvre and vibration suppression of a flexible spacecraft in the presence of external disturbances are investigated in this paper. The spacecraft consists of a rigid hub and two flexible appendages. The Euler–Bernoulli beam theory is used to model the flexible parts. The attitude dynamic equations of motion are derived using the law of conservation of angular momentum, and the flexural equations are derived. The attitude of the spacecraft is represented using the quaternion parameters. The controller is designed based on the super-twisting sliding mode control. The sliding surfaces are introduced and the global asymptotic stability of the flexible spacecraft on the sliding surfaces is assured via Lyapunov method. The control law is designed such that the sliding condition is satisfied and the system reaches the sliding surfaces in finite time. The simulation results verify the performance of the controller in the presence of bounded disturbances, sensor noises and abrupt changes in parameters.
Introduction
Attitude dynamics and control of a flexible spacecraft is one of the most widely studied areas in the past three decades, and it has received so much attention. The attitude manoeuvre of a flexible spacecraft can excite flexible modes due to highly nonlinear dynamic coupling between elastic and rigid parts. Thus, neglecting the flexibility in modelling and control design may result in the instability of the overall system.
A survey of research in this area has been published by Meirovitch et al. 1 Among numerous control strategies developed for attitude stabilization and control, variable structure control attracts attention owing to its property of insensitivity.2–4 In Shahravi et al., 2 adaptive sliding mode control with hybrid sliding surface (HSS) is used to minimize the effects of uncertainties and disturbances. For the attitude stabilization of networked flexible spacecraft during large angle slew manoeuvre, a novel type of adaptive fuzzy sliding mode control (AFSMC) method for solving the dynamic model with network-induced delay is proposed in Dong et al. 4 Gupta 5 extends the linear–quadratic–Gaussian method for feedback control design. This method includes frequency shaped weighting matrices in the quadratic cost functions. In the presence of parameter uncertainty, adaptive control systems have been designed in Bennett et al. 6 and Singh and De Araujo. 7 A wide range of approaches have been proposed for using piezoelectric material to control the vibration of flexible structures, such as strain rate feedback (SRF) control. 8 , 9 Finally, in Hossein Nejad et al., 10 we stabilized a flexible spacecraft using adaptive-sliding mode control technique, but that controller could not perfectly track and also, chattering of sliding was a problem.
Our contributions in this paper are in two aspects: dynamic model and control. In the field of flexible satellite control, many works have been done, as discussed below. The combination of the sliding mode control and the fuzzy method in Dong et al. 4 is proposed to stabilize a flexible spacecraft with uncertainties. In this paper, the dynamic of the flexible spacecraft is considered very simple. Also, the coupled nonlinear dynamic between the rigid and flexible module of the spacecraft is estimated with the fuzzy method.
In Hu et al., 11 assuming all state variables are limited and using the slide mode control, only the asymptotic stability of the attitude dynamics of the spacecraft is shown and the vibration suppuration of the flexible components is not shown in this work.
Attitude Recovery of a flexible spacecraft is done by Tafazoli. 12 In order to retrieve the attitude and eliminate the vibrations of the panels, a nonlinear controller is designed based on input–output feedback linearization.
Singh 13 uses an input–output feedback linearization to stabilize the attitude of a flexible spacecraft. In this paper, the attitude of the spacecraft is considered as the system’s output, and the attitude control is asymptotically stable. In Tafazoli 12 and Singh, 13 none of them have stability analysis.
In the field of controlling the attitude of the flexible spacecraft, some researchers utilize additional actuators that are installed on flexible panels to eliminate unwanted vibrations.14–16 In addition to complexity, this method requires the use of high-tech actuators and more energy consumption.
Also, in some other work, one-axis attitude control is considered. However, the generalization of one-axis attitude control to three-axis attitude is not always easily feasible.17–19 Qu and Gao 17 uses the sliding mode method to control the one-axis attitude of a flexible spacecraft. In Singh and Zhang, 18 a one-axis stabilization is done using the adaptive output feedback control. Cai and Lim 19 uses the optimal control to stabilize one-axis attitude manoeuvring of a flexible spacecraft.
Due to the strong nonlinear coupling between the dynamics and flexible parts of the spacecraft, often some nonlinear term of system dynamic to simplify are neglected.20–22 In Hu, 20 the vibration of the flexible components is limited, and the simplified dynamic of the flexible spacecraft is stabilized by adaptive back-stepping control. In Šiljak, 21 the simplified dynamics of a flexible spacecraft is stabilized in several steps using active and passive methods. In order to stabilize the attitude of a flexible spacecraft and suppress the vibration of panels, an adaptive controller is designed to robust against limited disturbances and parametric uncertainties. 22 In this paper, the simplified dynamic is used too.
The dynamic model of our problem consists of three-axis attitude manoeuvring with double-direction vibrations of flexible panels (bending in two directions). In this paper, coupling the vibration of the panels with the attitude dynamic of the rigid hub and the resulting partial differential equation (PDE) equations converts to the matrix format (open loop model) to design control. Indeed, the open loop model is achieved without any simplification.
In Souza and Souza, 23 TayyebTaher and Majid Esmaeilzadeh 24 and Ji and Liu, 25 the single attitude control with single-direction vibration of panels are considered. Also, Huo et al.’s 26 and Cao et al.’s 27 three-axis attitude control of a flexible satellite is controlled with the single-direction bending for the panels, but as previously stated in this article, three-axis attitude control with double-direction vibration of the panels are modelled without simplification.
Innovation in this point is the perfect tracking of the attitude parameters and the suppression of the double-direction vibration of the panels simultaneously. Also, the robustness of the designed controller has been studied in terms of parameter change, noise and disturbance. At the reaching phase, considering the use of the vector norm in the controller, the robustness against the match perturbation such as the actuators disturbance (15% relate to normal) and unmatched perturbation including the vibrations of the panels, the sensor noise (15%) and an abrupt change of parameters is achieved with the saturation limitation.
Also, the saturation function with super-twisting approach are used to reduce chattering. As a result, the controller is capable of perfect tracking and eliminating vibrations within 30 s by considering the saturation limits of the actuators.
Finally, although in this paper, the perfect tracking of the attitude control was considered, but compared with Kaviani Rad et al. 28 and Cao et al. 29 which were just stabilization problem in the set-point manoeuvre, reducing chattering, increasing the controller’s robustness against disturbances, noise, and abrupt change of the parameters are achieved by defining the appropriate boundary layer and using super-twisting concepts.
In this paper, a super-twisting sliding mode control is developed to achieve perfect tracking for the attitude of a flexible spacecraft and simultaneously suppress the excited vibration of its appendages. Our proposed method enables attitude tracking in the presence of bounded disturbances and parameter uncertainty without chattering. As can be seen in Figure 1, the flexible spacecraft consists of a rigid hub and two flexible appendages. It is assumed that the attitude motion excites the two flexible appendages anti-symmetrically and does not change the position of the centre of spacecraft mass. The Euler–Bernoulli beam theory is used to model the flexible appendages. The deflections are small. Hence, the linear elastic theory can be used. The equations of motion are expressed in the body-fixed reference frame whose origin is located at the centre of spacecraft mass and its x-axis is along the longitudinal direction of the appendages (as shown in Figure 1).
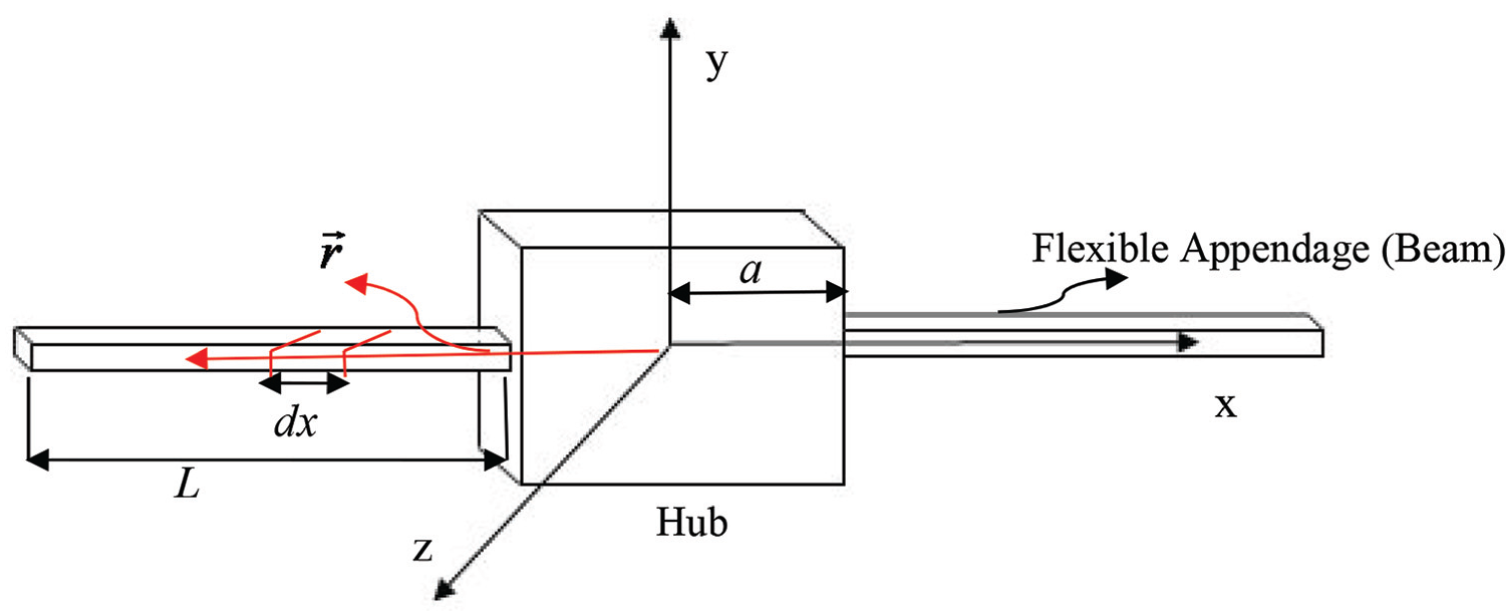
The scheme of a flexible spacecraft.
In this paper, the vibrations of the panels are considered in two directions (y, z). The stiffness and the mass matrices are derived from modal analysis and complex integral relationships.
To design the controller, there is no simplification for the dynamic model of the flexible spacecraft. Indeed, the dynamic model of the flexible spacecraft used in this paper is more complicated than similar tasks. Our main contribution include the following. At first, a proper hyper-surface is designed and its asymptotic stability is proved by the Lyapunov method during slipping.
At the reaching phase, considering the use of the vector norm in the controller, the robustness against the match perturbation such as the actuators disturbance (15% relate to normal) and unmatched perturbation including the vibrations of the panels, the sensor noise (15%) and an abrupt change of parameters is achieved with the saturation limitation.
Also, the saturation function with super-twisting approach are used to reduce chattering. As a result, the controller is capable of perfect tracking and eliminating vibrations within 30 s by considering the saturation limits of the actuators.
This paper is organized as follows. In the section ‘Mathematical model of the flexible spacecraft’, attitude dynamics and flexural equations of the system are derived in a suitable form for control purposes. The attitude of the spacecraft is represented using the quaternion parameters. The controller design procedure is introduced in the section ‘Controller design’ and the stability of the closed loop system is proved via Lyapunov method. Section ‘Simulation results’ gives the simulation results of the proposed control approach. Finally, the paper is completed with some concluding comments.
Mathematical model of the flexible spacecraft
Attitude dynamic equations
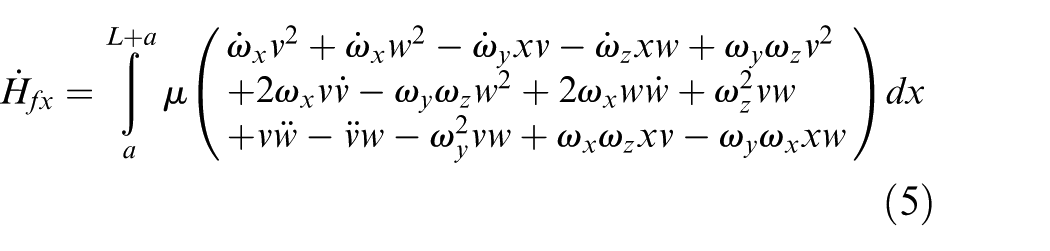
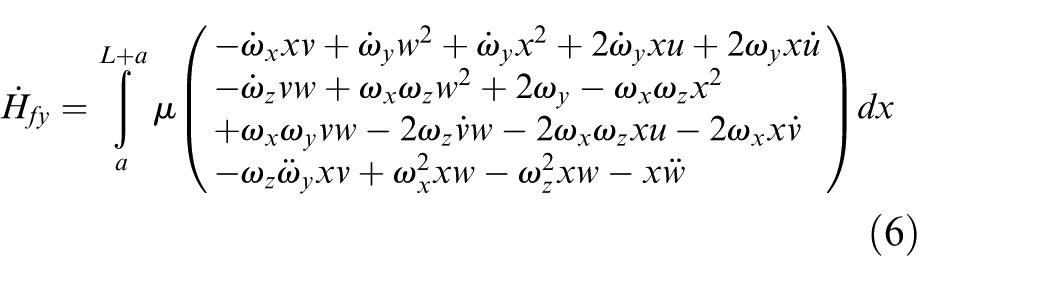
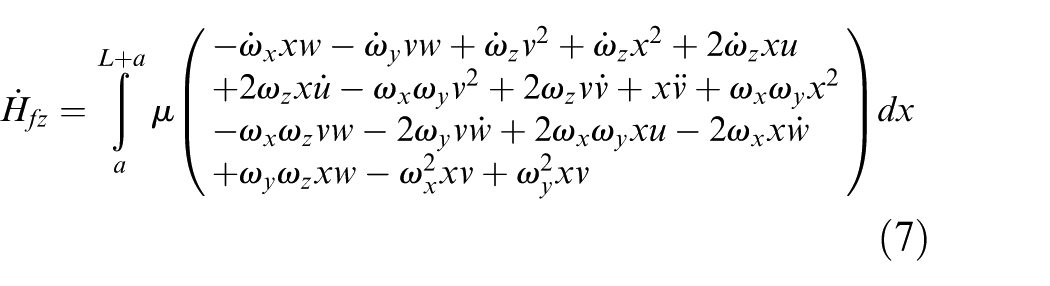
The attitude dynamics of the spacecraft shown in Figure 1 is derived using the following equation 30 , 31



where

L is the length of each appendage,


where
x, a and L are shown in the Figure 1.
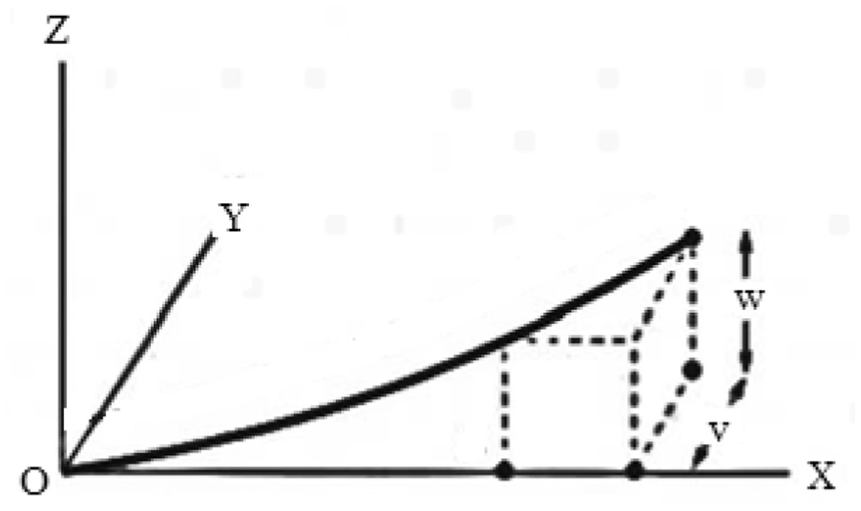
The deflection of flexible panels (v, w) related to the XYZ coordinate.
Due to the flexibility of the panels, these deflections have an infinite number of modes. v and w were discretized as indicated in equations (8) and (9). Indeed, v and w have been written as a product of a time function
Now, equations (5)–(7) are modified based on equations (8) and (9) as below
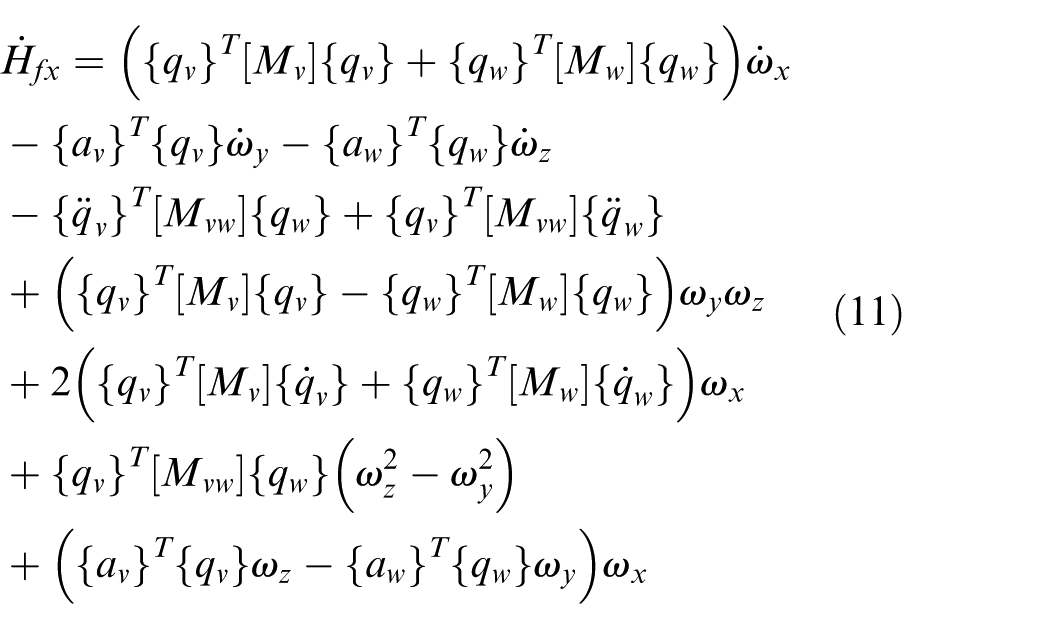
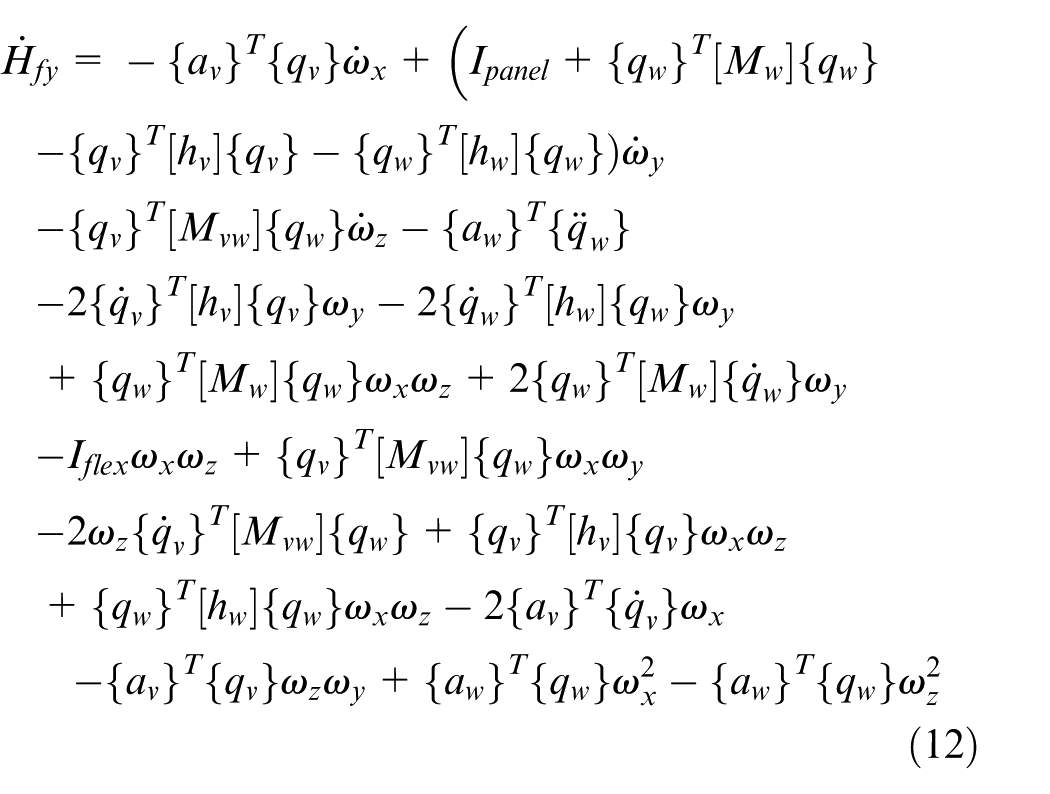
Therefore, equation (1) can be written in the compact form based on equations (11)–(13) as follow
where
Attitude kinematics
The spacecraft attitude with respect to the inertial frame is represented by the quaternions. 33 A set of kinematic equations describe the rate of change of the attitude parameters due to the dynamics of the spacecraft
Controller design
The control objective is to find
Attitude error
Denoting
The conversion from the quaternions to Euler angles is shown in the following
The rate of change of

where

Sliding surfaces
The sliding surfaces can be defined as

Stability of the sliding surfaces
The following Lyapunov function candidate is proposed to ensure if the controller forces the spacecraft to stay on the sliding surfaces,

Since
Therefore,

Then

Assuming the system is on the sliding surfaces,

According to equation (24),
Super-twisting sliding mode control law
The derivative of sliding surfaces are determined as below
with
where to simplify,
The sliding mode control law is proposed below
where

In equation (33),
According to equations (15) and (33),
where
Stability proof
The following positive definite Lyapunov function is proposed to prove that the system reaches the sliding surfaces in finite time

Differentiating

Using equation (31),
In the above equation,
Simplifying the above equation using equation (35),

It is clear that
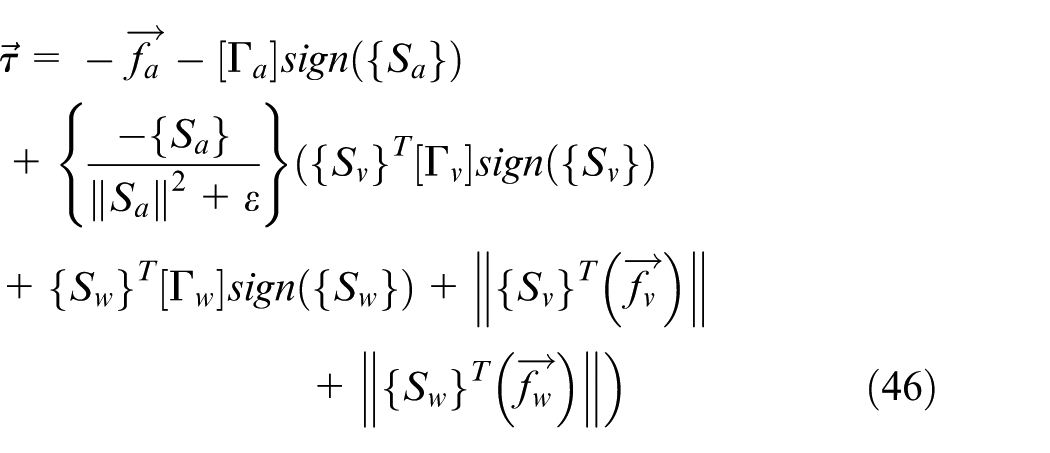
Therefore, the modified super-twisting sliding mode control based on equations (42)–(44) and equation (33) is obtained as below
Simulation results
Results of super-twisting sliding mode control
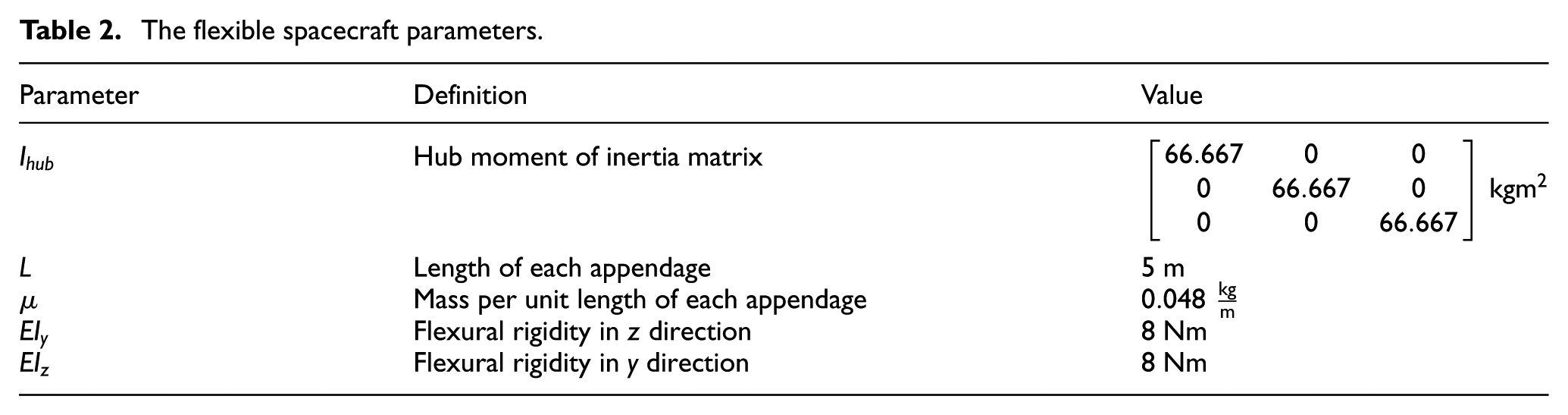
In this section, the control scheme proposed in equations (35) and (45) is simulated for three-axis attitude tracking manoeuvre of a flexible spacecraft. The values of the spacecraft parameters are as follows.
Attitude tracking control
Figures (3)–(11) are the simulation results of the super-twisting sliding mode controller in the attitude tracking manoeuvre. The tracking manoeuver in simulations is considered to do imaging and sun-pointing missions. Therefore, the variations of the attitude parameters are defined in such a way that the total possible space of the quaternion is included and global asymptotic stability of the controller is shown. The controller parameters are shown in the Table 1. These parameters are designed based on trial and error. First, the values of parameters are considered as unit and then changed with trial and error in order to obtain the appropriate controller quality.
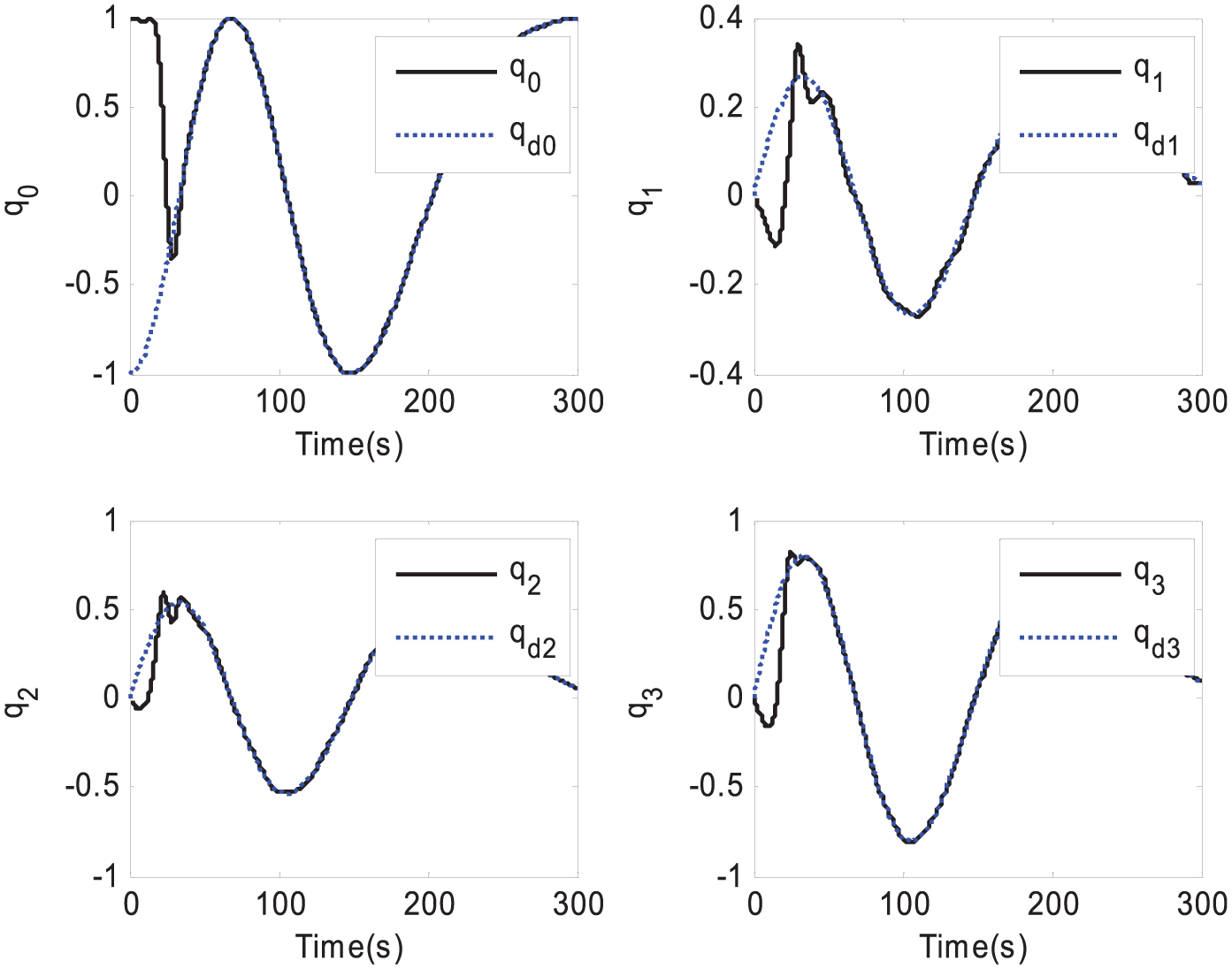
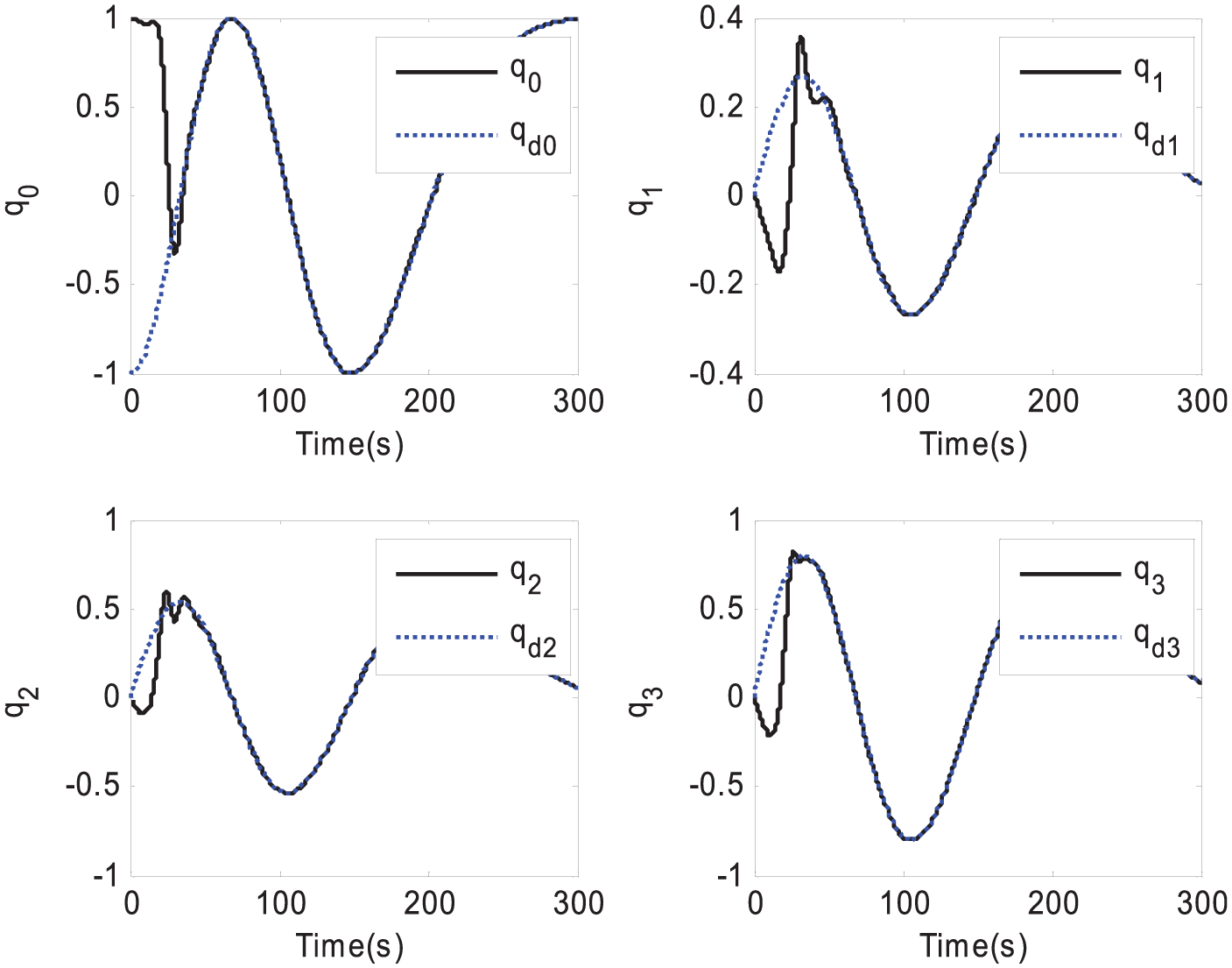
Attitude quaternion parameters and their desired path with saturation assumption for actuators.
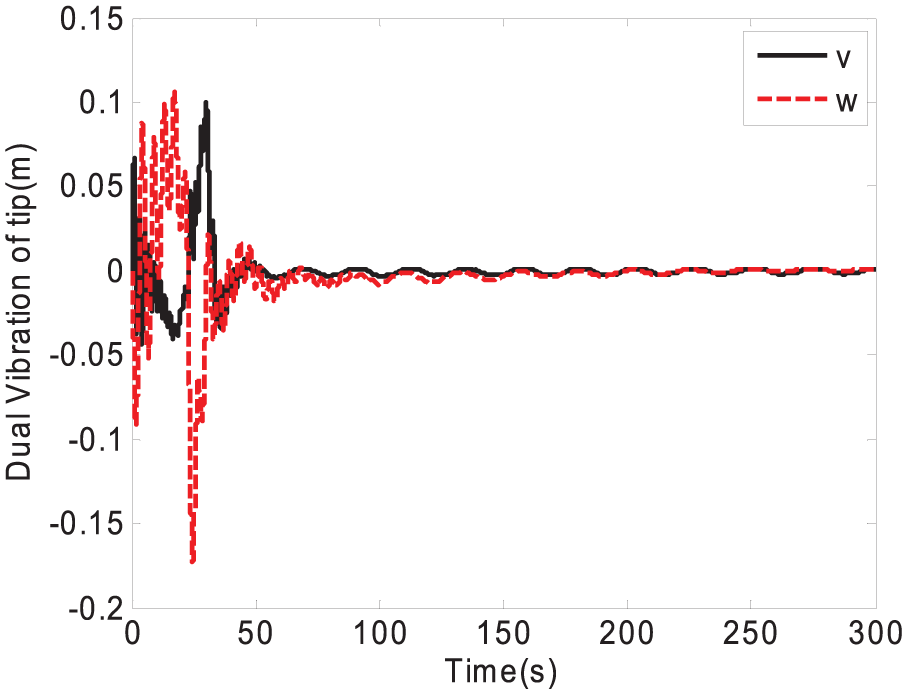
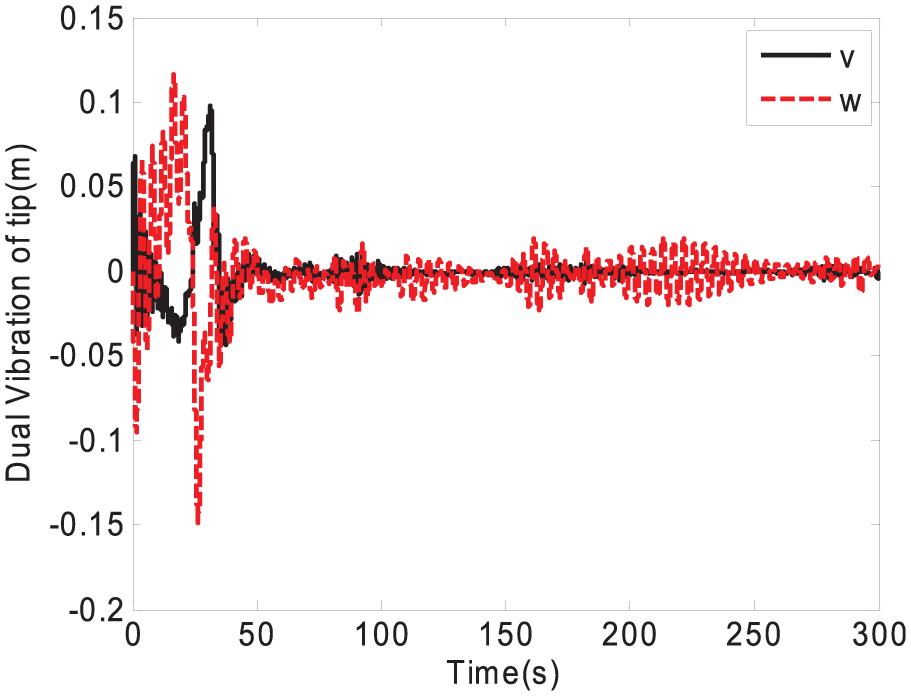
Flexural displacements at tip with saturation assumption for actuators.

Attitude quaternion parameters and their desired path with saturation and disturbance.
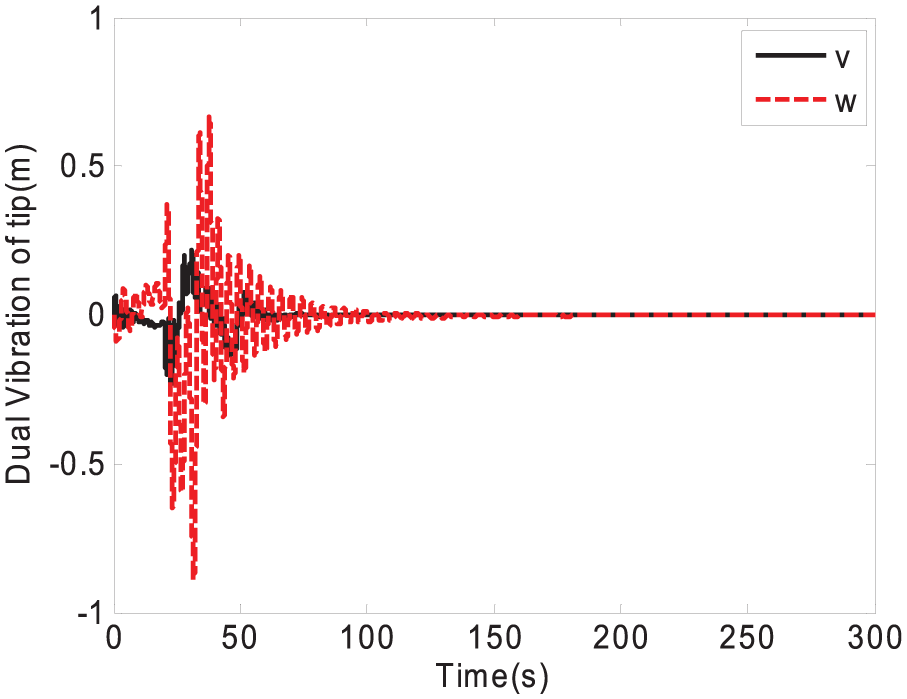
Flexural displacements at tip with saturation and disturbance.
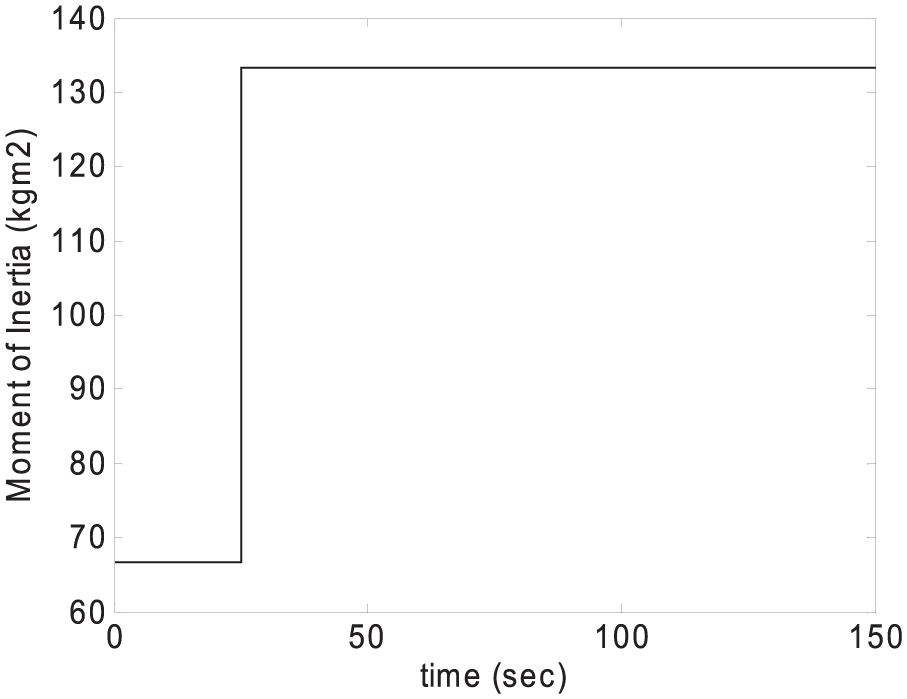
Abrupt change in moment of inertia.
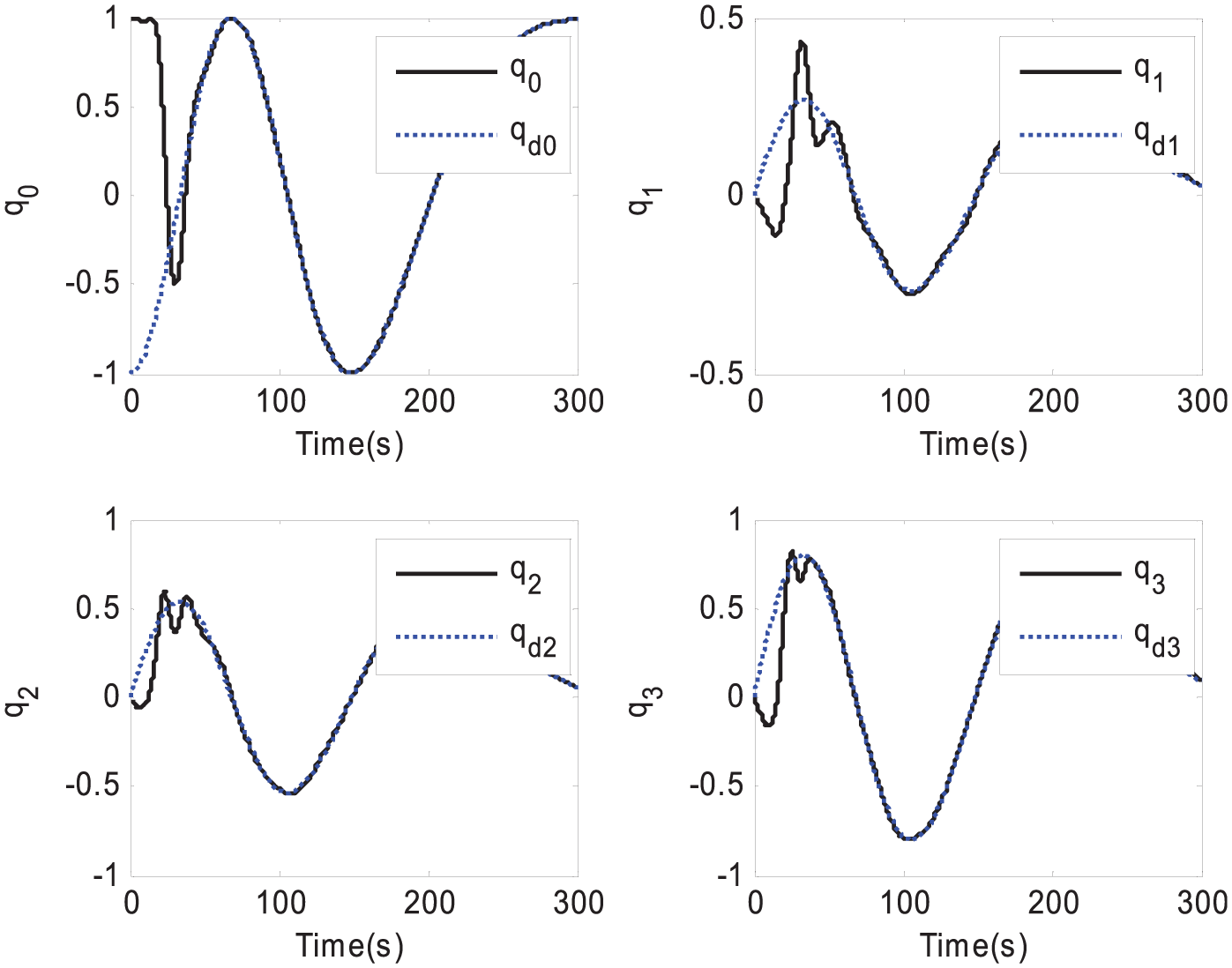
Attitude quaternion parameters and their desired path with saturation and parameter change.
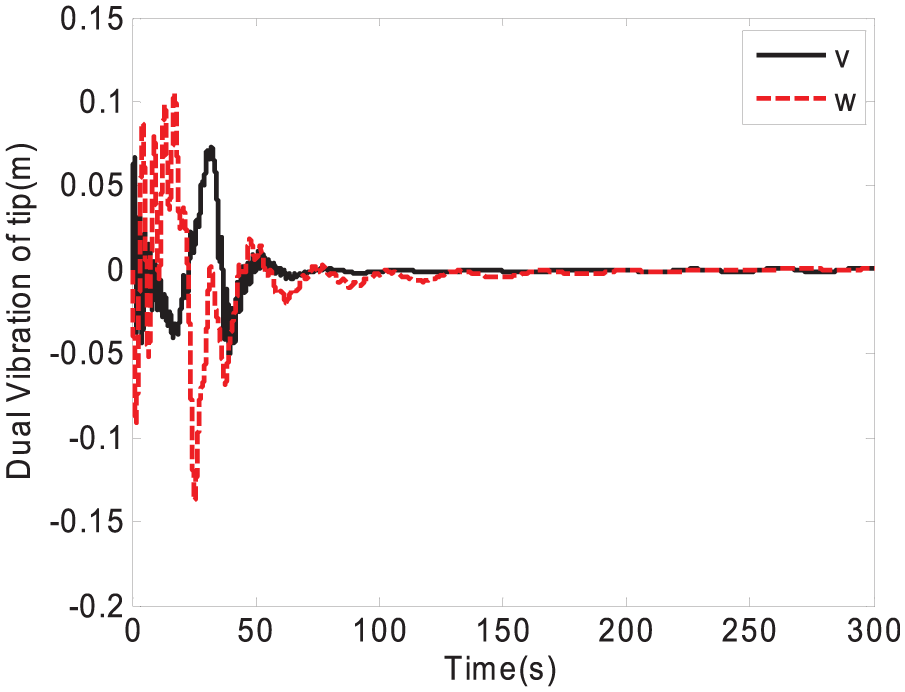
Flexural displacements at tip path with saturation and parameter change.
Attitude quaternion parameters and their desired path with saturation and noise.
Flexural displacements at tip with saturation and noise.
The controller parameters.

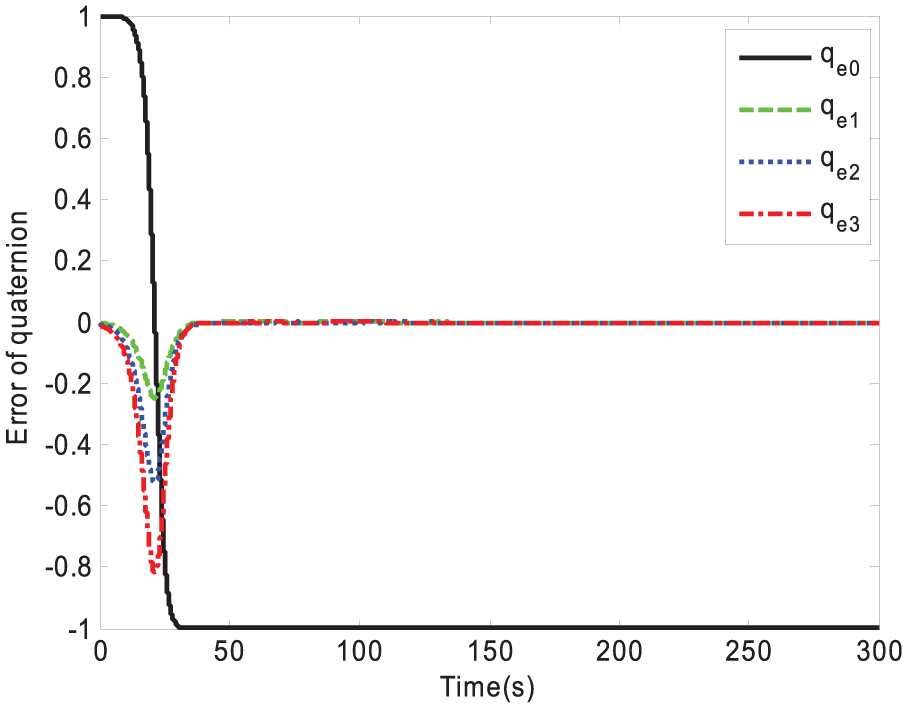
In these simulations, we considered saturation level for actuators. The value of saturation is 100 Nm for each actuator. Also for each transverse displacement, two assumed modes are considered. As can be seen in Figure 3 after about 30 s, the quaternion attitude of the spacecraft tracks its desired value with high precision.
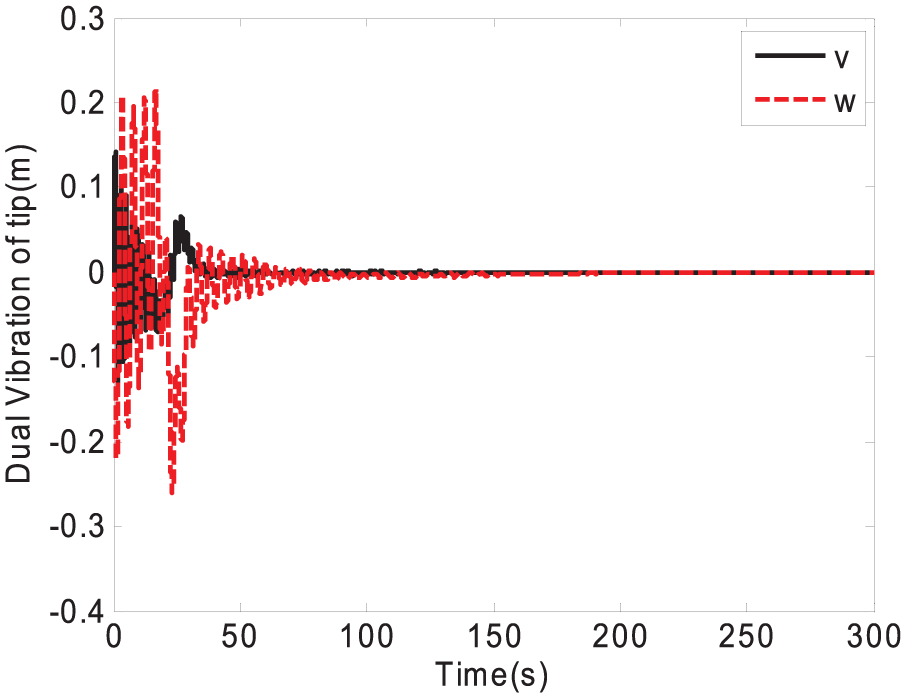
Moreover, according to Figure 4, the flexural displacements are simultaneously damped. The transient behaviour of the flexural displacements is highly influenced by the speed of convergence of the attitude error. Therefore, a trade-off between these two factors must be performed to avoid too much vibration in the transient response of the system.
Attitude tracking control in the presence of disturbances
In this subsection, the robustness of the super-twisting sliding mode controller to external disturbances is examined. Here, the disturbance is a matched perturbation that indicates the deviation of the actuators compared with their nominal conditions. The disturbances (in torques) are the random oscillating functions with a maximum range of 15% deviation from the nominal.
Figures 5 and 6 are showing performance of super-twisting sliding mode control in the presence of disturbances (15%) and actuator saturation.
According to these two figures, the system performance is suitable even in the presence of disturbance with high amplitude and high frequency.
Attitude tracking control in the presence of abrupt changes in parameters
In this subsection, the robustness of the controller to abrupt changes in parameters is discussed.
The changing of parameters that are a mismatched perturbation can be the uncertain, the classic change or the abrupt change. In order to evaluate the controller’s robustness in the pessimistic scenario, the parameters change are considered abruptly. This can happen when a portion of the flexible panel is removed from the spacecraft during the mission.
Figure 7 shows the abrupt change applied to the hub moments of inertia.
Figures 8 and 9 show the performance of the system in the presence of sudden changes in parameters and compares it with the response of the system with constant parameters. As can be seen, the performance of the system is the same in both cases except an instant jump in the response at 60 s.
Attitude tracking control in the presence of sensor noises
In this subsection, the performance of the controller with sensor noise is shown. The type of noise is white noise. The noise power is about 15% of the generalized coordinates.
Figures 10 and 11 show the response of the controller in the presence of the sensors noises. As can be seen, controller acts properly.
Compared results between the super-twisting and traditional sliding mode control
In this section, the performance between the designed super-twisting sliding mode control in this paper and traditional sliding mode control is compared. The values of the spacecraft parameters and the controller parameters are shown in the Tables 1 and 2. Also, similar to the previous description in the section ‘Controller design’, the traditional sliding mode control is considered as following form
The flexible spacecraft parameters.
In order to compare the performance of two control approaches, the simulation results of the quaternion errors, the flexural displacements at tip and the control input are shown below.
Simulation results at attitude tracking manoeuvring with saturation consideration
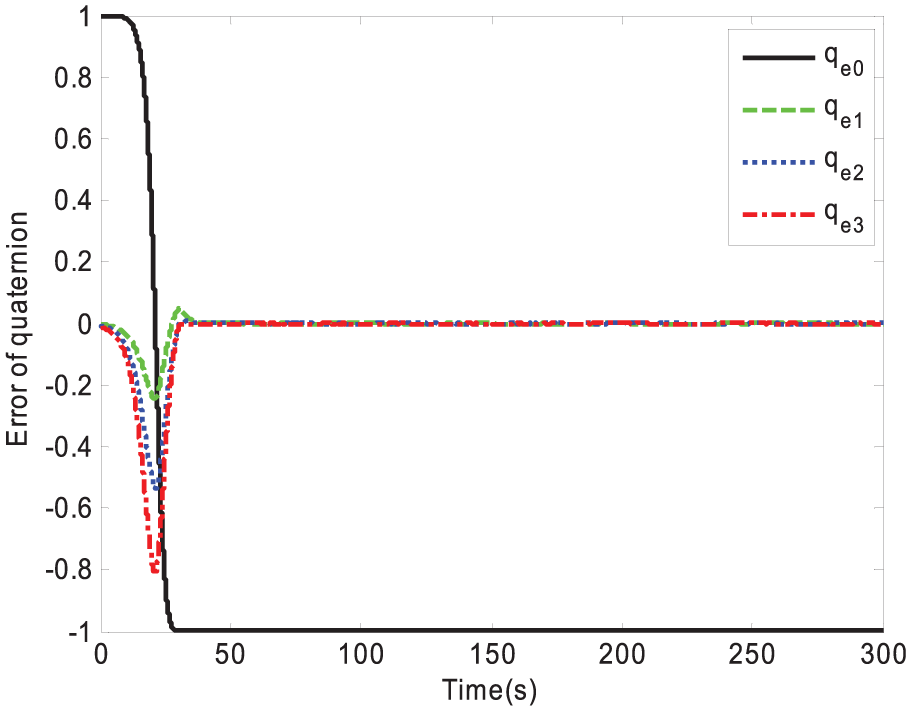
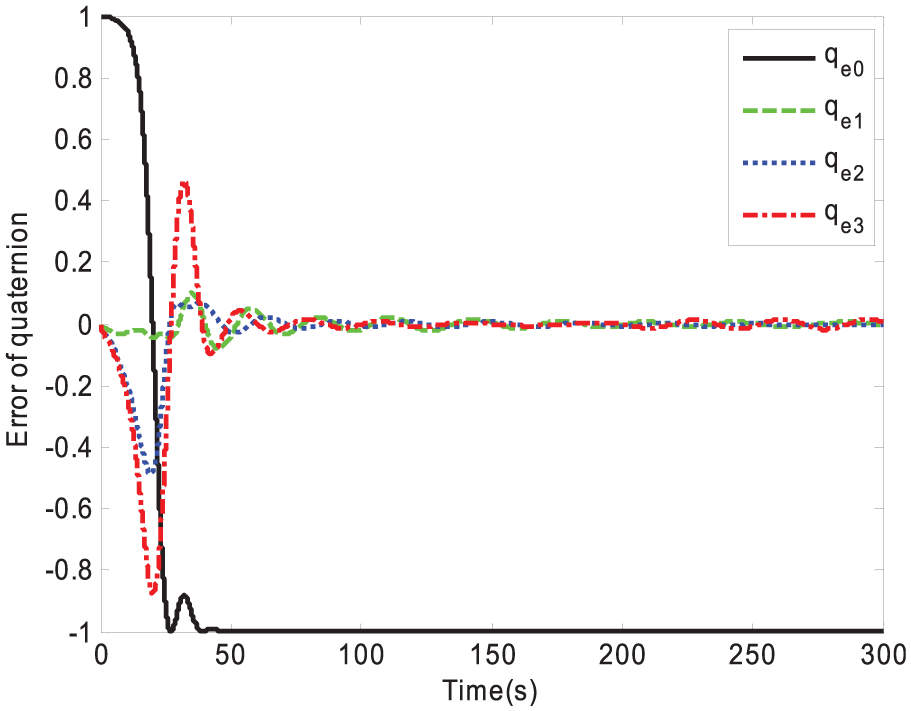
In this subsection, the value of saturation level is 100 Nm for each actuator. Also for each transverse displacement, two assumed modes are considered. As can be seen in Figures 12 and 13 after about 50 s, the quaternion errors of the spacecraft tracks its desired value. Although the traditional control has perfect tracking with higher precision, Figures 4 and 14 show that the super-twisting control suppresses the flexural displacement at faster rate with lower amplitude.
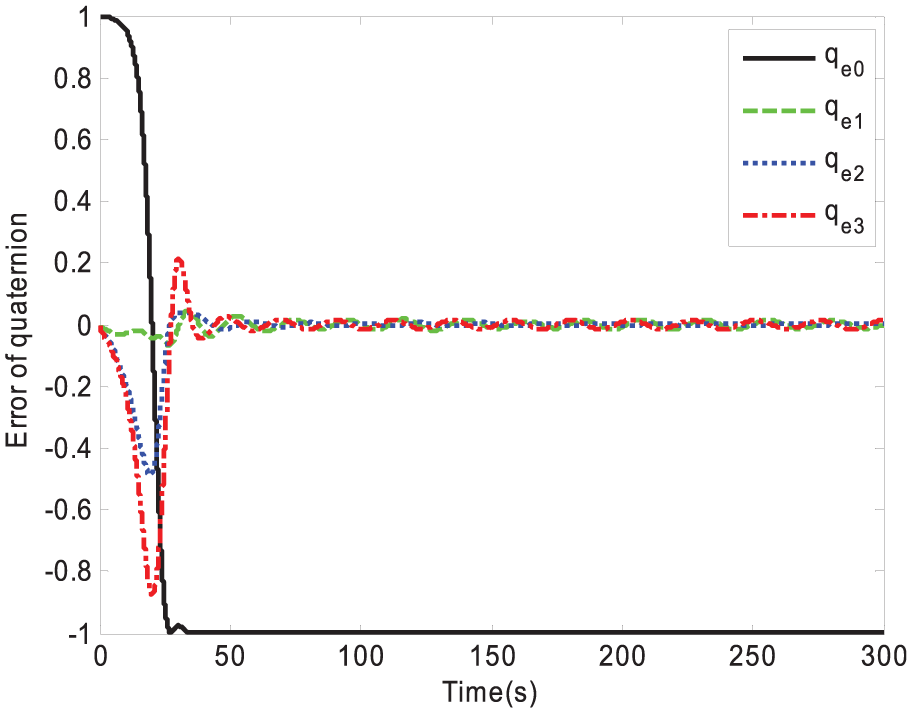
Attitude quaternion errors with saturation assumption for super-twisting approach.
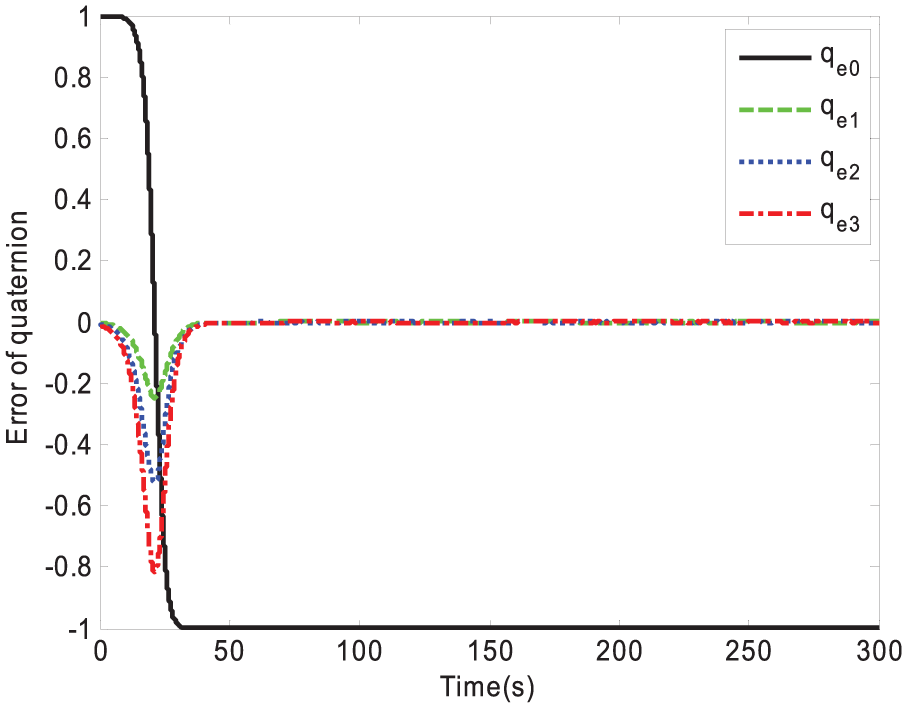
Attitude quaternion errors with saturation assumption for traditional approach.
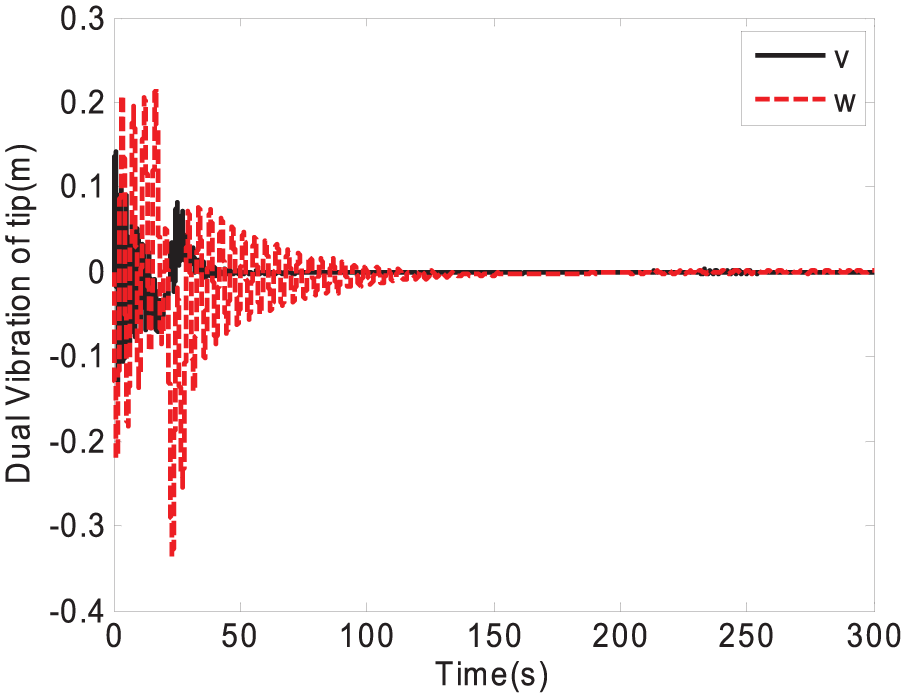
Flexural displacements at tip with saturation assumption for traditional approach.
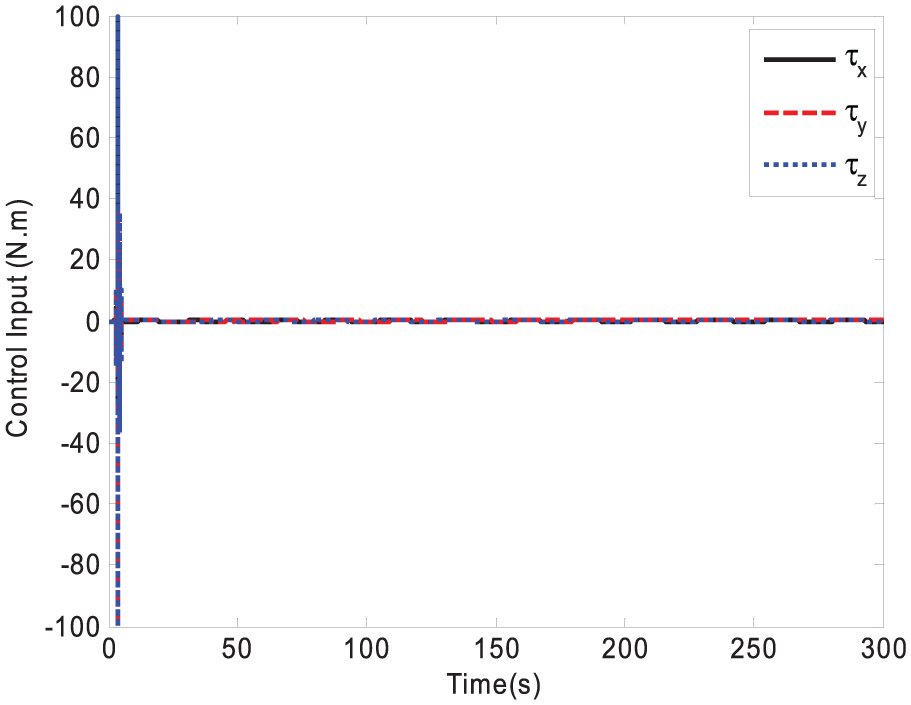
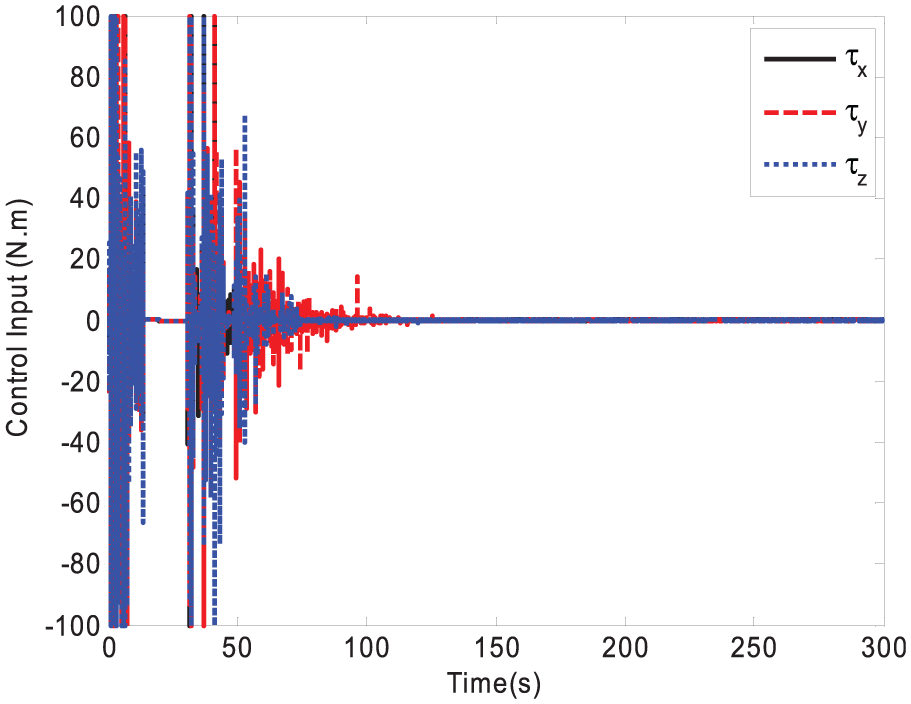
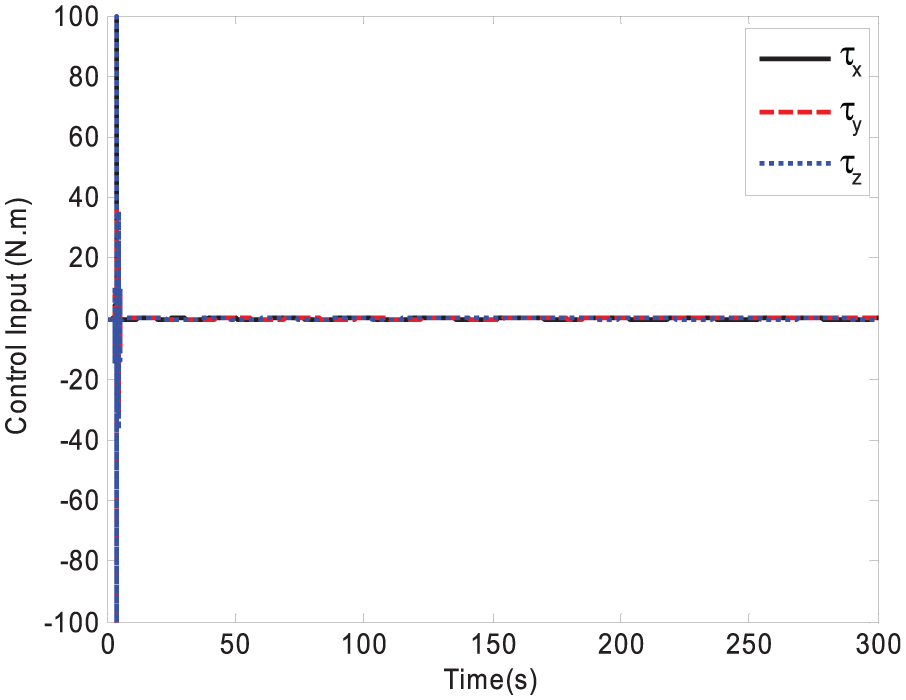
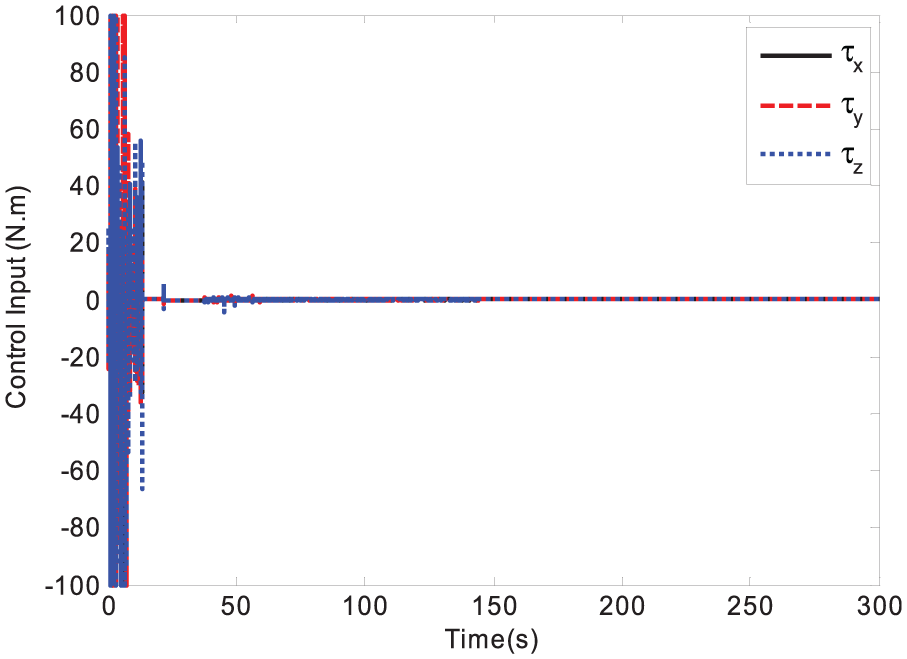
Moreover, according to Figures 15 and 16, the input control of the traditional approach has more chattering. Due to the actuator limitations, we know that the chattering is a dominant factor to compromise between the traditional and the super-twisting control.
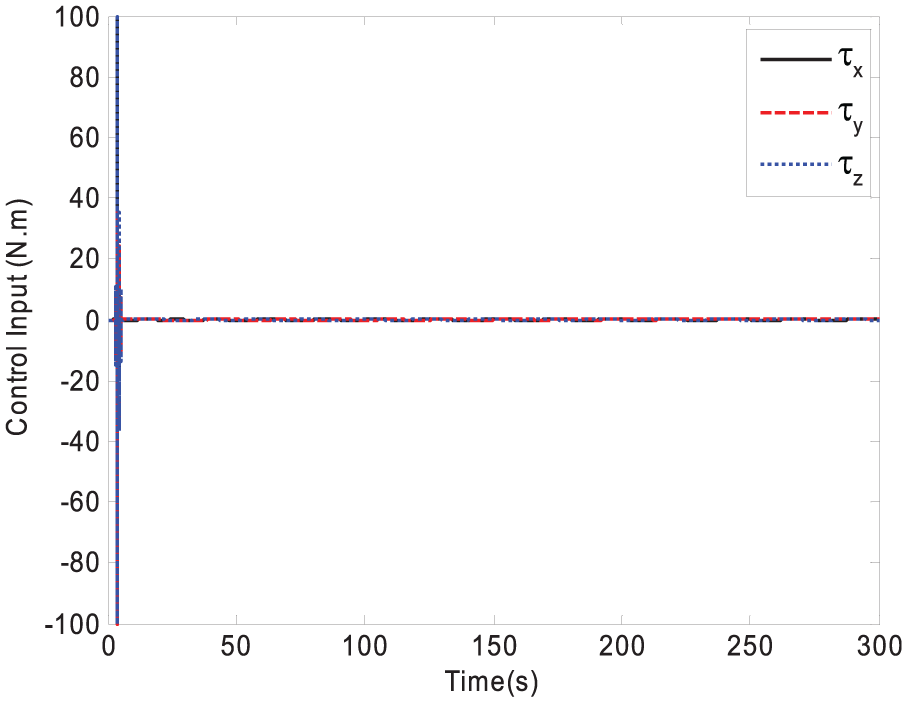
Control input with saturation assumption for super-twisting approach.
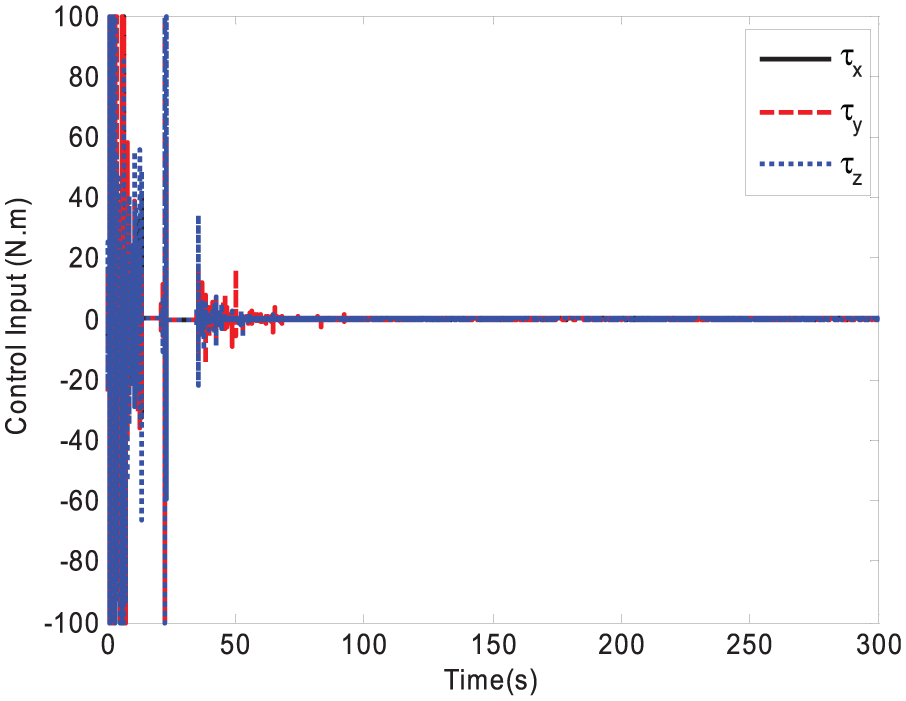
Control input with saturation assumption for traditional approach.
Simulation results at attitude tracking manoeuvring in the presence of disturbances
In the following, the performances of the super-twisting and the traditional sliding mode controller to external disturbances (15%) and actuator saturation are examined.
Figures 17 and 18 show that the traditional control has perfect tracking with higher precision. Figures 6 and 19 show that the super-twisting control suppresses the flexural displacement at faster rate with lower amplitude. Also, according to Figures 20 and 21, the input control of the traditional approach has more chattering.
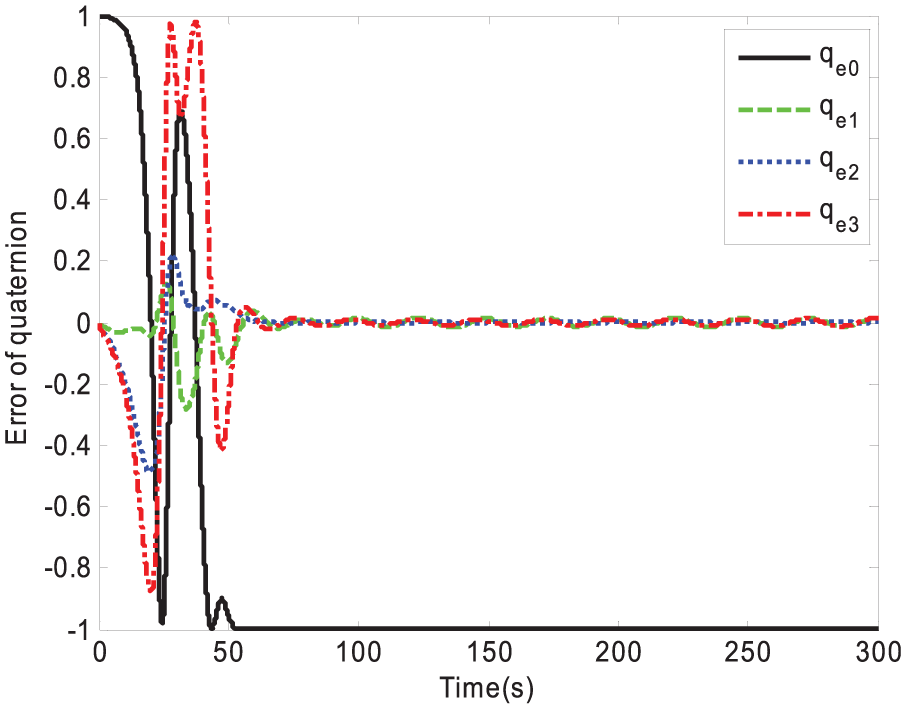
Attitude quaternion errors for super-twisting approach with saturation and disturbance.
Attitude quaternion errors for traditional approach with saturation and disturbance.
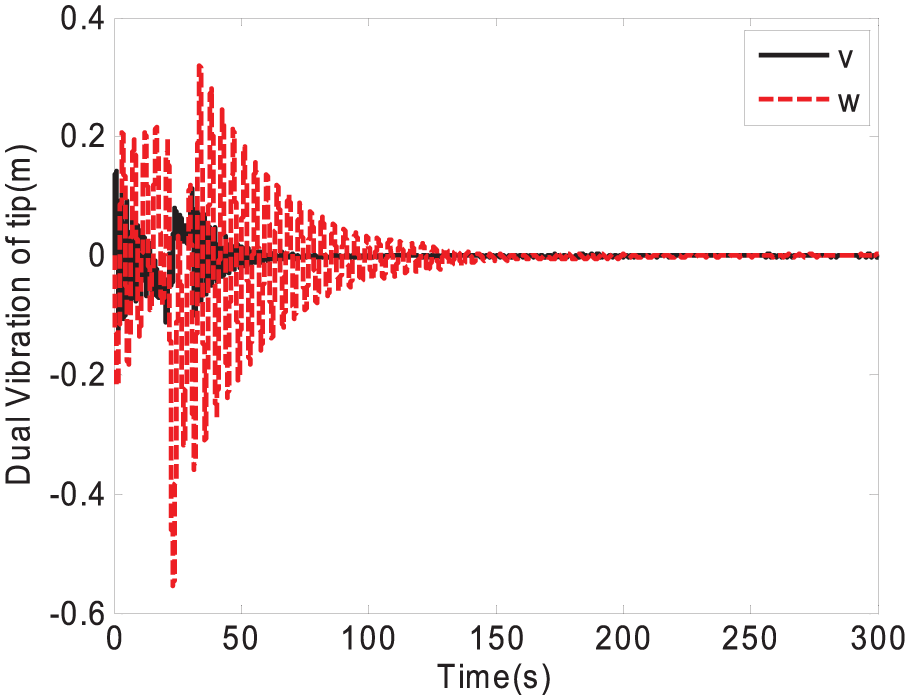
Flexural displacements at tip for traditional approach with saturation and disturbance.
Control input for super-twisting approach with saturation and disturbance.
Control input for traditional approach with saturation and disturbance.
Attitude tracking control in the presence of abrupt changes in parameters
Figures 22–26 are showing performance of the super-twisting and the traditional sliding mode control in the presence of parameters change and actuator saturation. Figures 22 and 24 show that the traditional control has perfect tracking with higher precision. Figures 9 and 25 show that the super-twisting control suppresses the flexural displacement at faster rate with lower amplitude. Also, according to Figures 23 and 26, the input control of the traditional approach has more chattering.
Attitude quaternion errors for super-twisting approach with saturation and parameter change.
Control input for super-twisting approach with saturation and parameter change.
Attitude quaternion errors for traditional approach with saturation and parameter change.
Flexural displacements at tip for traditional approach with saturation and parameter change.
Control input for traditional approach with saturation and parameter change.
Attitude tracking control in the presence of sensor noises
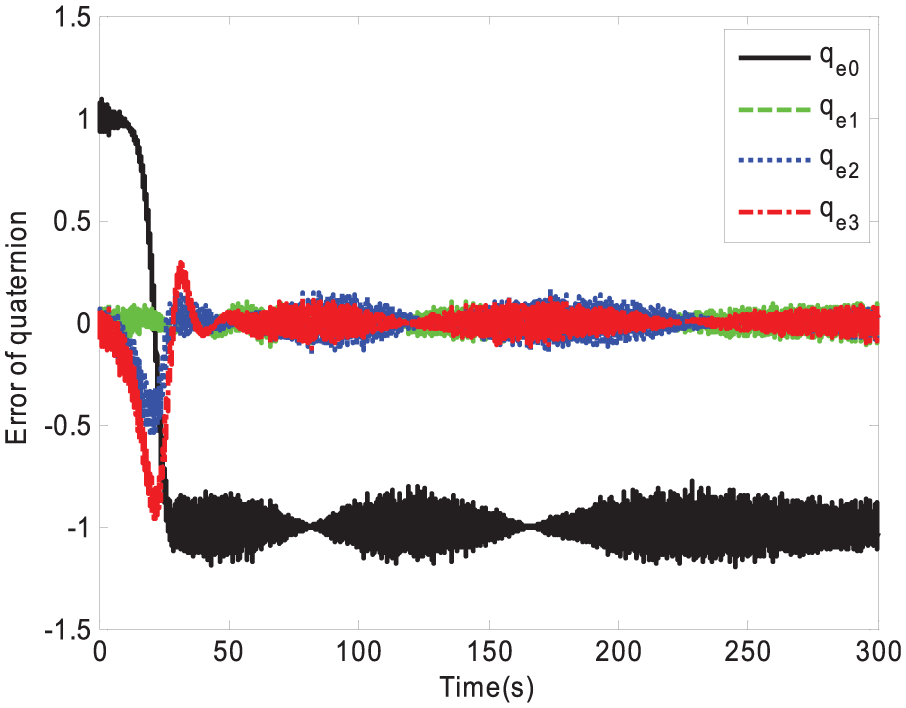
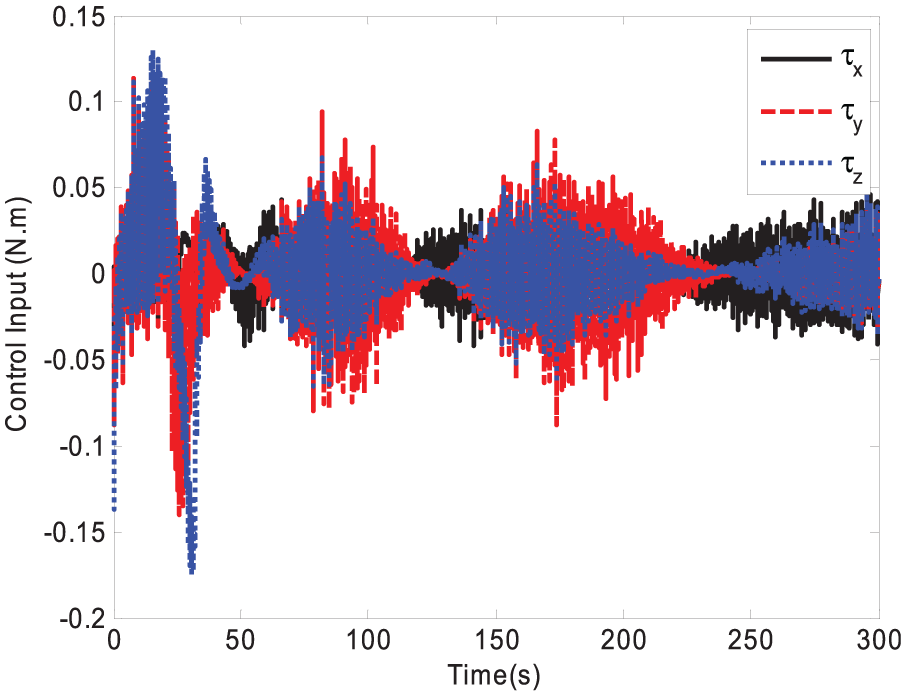
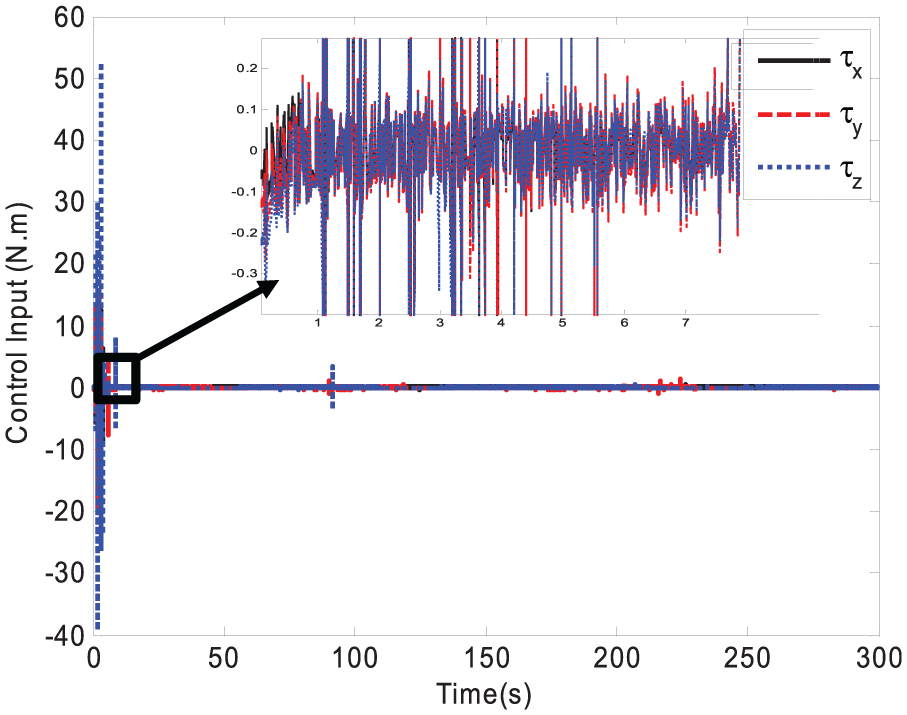
In this subsection, Figures 27–31 are showing performance of the super-twisting and the traditional sliding mode control in the presence of sensor noises and actuator saturation. The traditional control has perfect tracking with higher precision based on Figures 27 and 29. Figures 11 and 30 show that the super-twisting control suppresses the flexural displacement at faster rate with lower amplitude. Also, according to Figures 28 and 31, the input control of the traditional approach has a much higher amplitude and chattering than super-twisting control. In fact, its amplitude is about 500 times.
Attitude quaternion errors for super-twisting approach with saturation and noise.
Control input for super-twisting approach with saturation and noise.
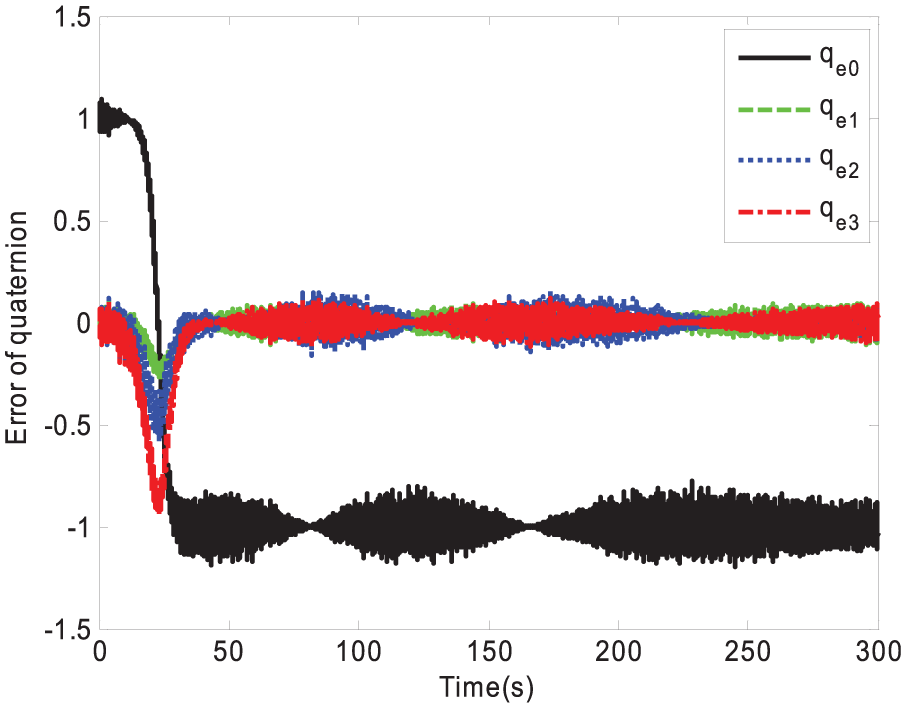
Attitude quaternion errors for traditional approach with saturation and noise.
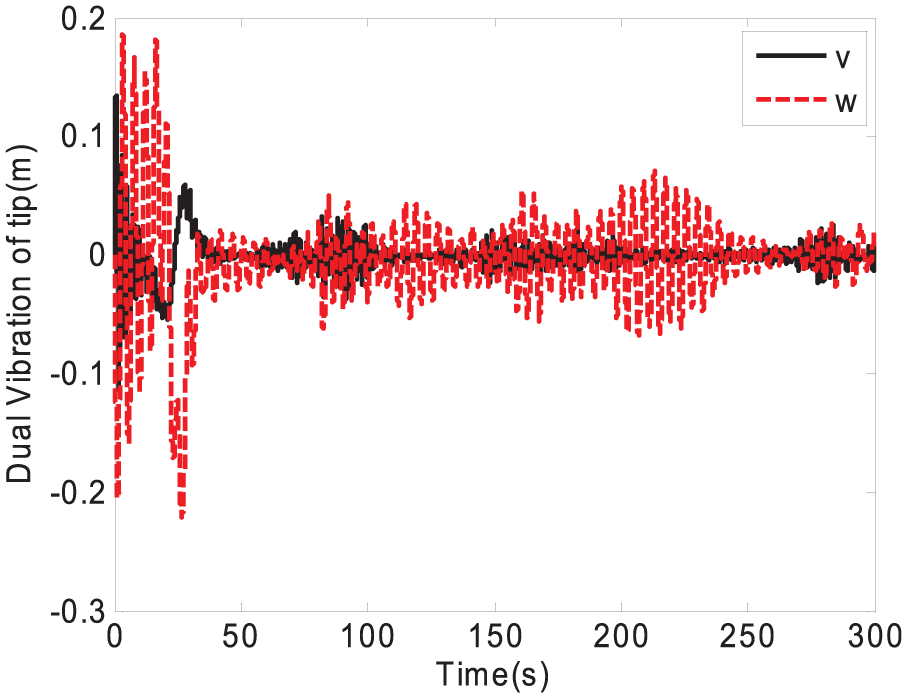
Flexural displacements at tip for traditional approach with saturation and noise.
Control input for traditional approach with saturation and noise.
Conclusion
A super-twisting sliding mode control technique was proposed to control attitude of a flexible spacecraft. The system parameters were assumed to be known. The sliding surfaces were introduced and their asymptotic stability was proved via Lyapunov method. The control law was designed such that the system reaches the sliding surfaces in finite time. The simulation results showed the validity of the proposed method. It was observed that the attitude tracking error converges to
Footnotes
Appendix 1
Elements of integral matrices.
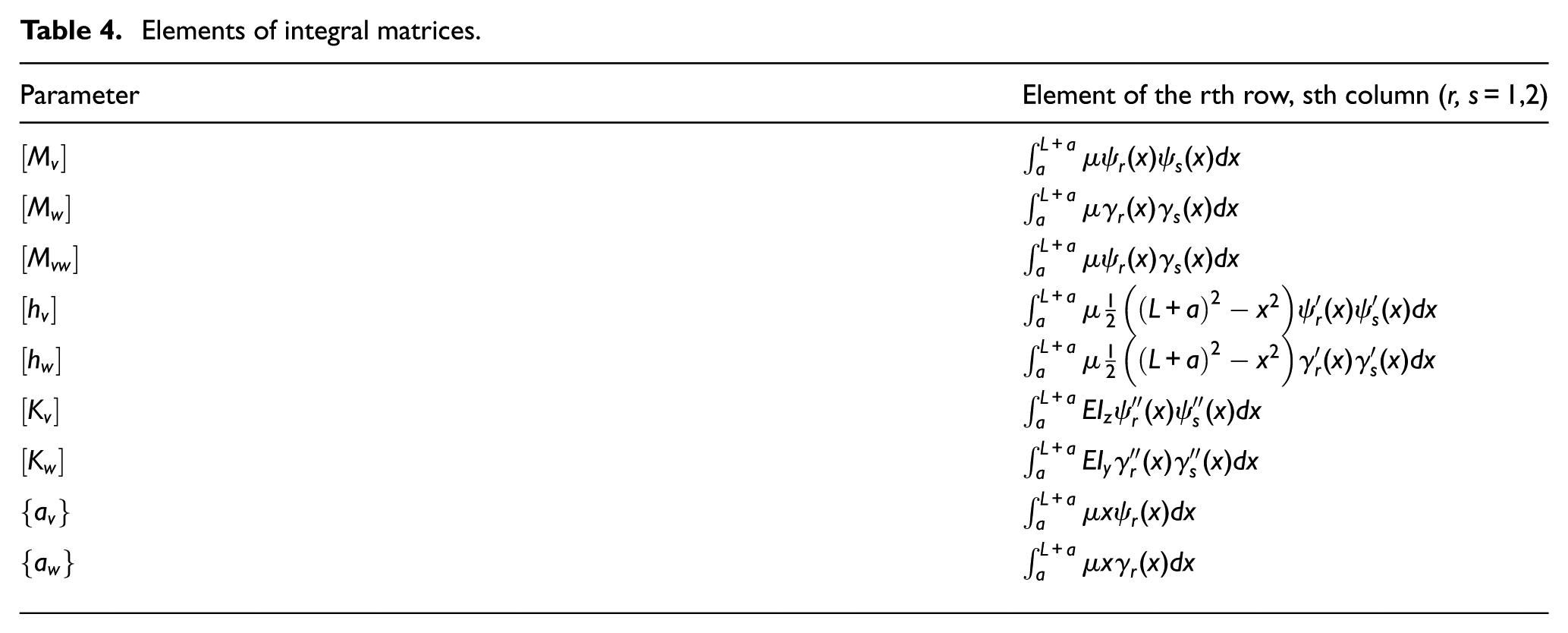
| Parameter | Element of the rth row, sth column (r, s = 1,2) |
|---|---|
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.