
Abstract
In order to improve the control performance of the global sliding mode control method, a fast global sliding mode control method is proposed to accelerate the response of the system by changing the exponential decay function in the sliding surface as an exponential bilateral decay function which can make the dynamic sliding mode surface evolve into the linear sliding mode surface in the finite time. The exponential reaching law is used to design the control law, and Lyapunov stability theory is used to prove the stability of the system. The control method proposed in this article can be applied to control the uncertain nonlinear system. Simulation results show that the method has faster response rate than the conventional global sliding mode control method. The method can be used to control the quad-rotor unmanned helicopter, and its good practicability can be verified.
Keywords
Introduction
Control problem of nonlinear system is a hot issue which has been received more attention.1,2 Some conventional control methods are hard to control the nonlinear system with uncertainties.3–5 Uncertainties in the control system can be caused by the structured uncertainties and external disturbances. 6 Therefore, some improved advanced control methods are proposed to resolve these isuues.7–10 Among them, the sliding mode control (SMC) is widely used in the nonlinear system because of its simple physical implementation and good robustness to the uncertainties of the internal parameters as well as the external disturbances. 11 The dynamic response process of the conventional SMC is composed of two parts: the sliding mode and the reaching mode. However, the robustness to the uncertainties of both internal parameters and external disturbance exists only in the stage of the sliding mode. That is, the whole control process is not global robustness.
The global sliding mode controller can cancel the reaching mode, reduce the chatting, and overcome the disturbance and the time delay.12,13 Therefore, a global sliding mode control (GSMC) is proposed and successfully applied in the brushless direct current (DC) motor servo system in Lu and Chen. 14 Furthermore, for the second-order time-varying system, an improved GSMC which can drive the system states along the minimum time trajectory within the input torque limit is proposed in Choi et al. 15 A type of integral sliding surface is also introduced to design a global robust controller in Yang et al. 16 Furthermore, discrete GSMC is also applied in many fields, such as switching DC–DC converter and missile electromechanical actuator system.17–19 Above all, GSMC can cancel the reaching mode by designing a nonlinear dynamic sliding mode surface. In this way, the system can enter into the sliding mode at the beginning. Based on the advantages of the GSMC, it has a good application prospect in many fields such as the flight simulators, rotating antenna, motor servo systems, as well as the missile electromechanical actuator.20–23
Generally, the sliding mode surface equation of the GSMC is a dynamic sliding mode surface which is composed of two parts: the linear sliding mode surface and the nonlinear function. The nonlinear function is generally designed as the exponential decay function. Theoretically, when the time t is infinite, that is, when the nonlinear function decays to zero, the dynamic sliding mode surface can evolve into the linear sliding mode surface. Although the evolution speed of the sliding mode surface can be changed by adjusting the exponential decay parameters, the trajectory of the system cannot be guaranteed to reach the linear sliding mode in the finite time. For this, a fast global sliding mode control (FGSMC) is proposed in this article. The method can ensure that the sliding mode surface equation can evolve into the linear sliding mode surface in the finite time. In this way, the response rate of the system can be further improved.
In section “Improved FGSMC,” an improved FGSMC method is given, and the stability of the system is analyzed. In section “Simulation analysis,” the simulation analysis of the proposed method is given. In section “Application instance,” an application instance on the quad-rotor unmanned helicopter controlled by the proposed method is given. A brief conclusion is given in section “Conclusion.”
Improved FGSMC
System model
A nth-order uncertain nonlinear system is described as
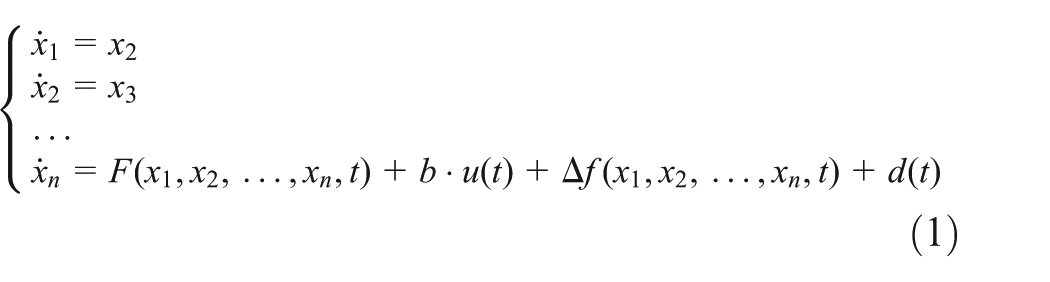
where [x1, x2, …, xn]T is the state vector of the system, F(x1, x2, …xn, t) is a nonlinear known function, b is a known constant, b ≠ 0, u is the control law to be designed, Δf(x1, x2, …, xn, t) represents the model uncertainty, and d(t) is the external interference. The upper and lower boundaries of the sum of the uncertainty are Dmax and Dmin, that is

The errors are defined as
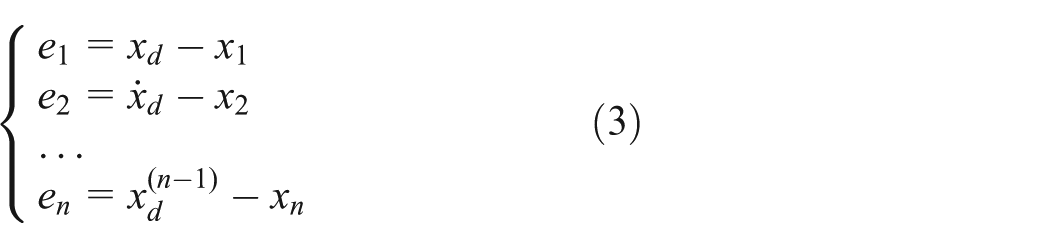
where xd is the desired signal. A suitable u(t) should be designed to make the system track the desired signal.
Improved dynamic sliding mode surface
For the system above, a global sliding mode surface is usually designed as

where the coefficient ci satisfies the Hurwitz conditions, and the function H(t) satisfies the following three conditions: 14
When t → ∞, H(t) → 0;
H(t) has the first-order derivative.
Therefore, H(t) is usually designed as a monotonic exponential decay function as follows

Thus, the global sliding mode surface can be described as

From equation (6), s(0) = 0. That is, any initial state of the system can remain on the sliding mode surface. Therefore, the reaching mode in the SMC is canceled. However, when H(t) ≠ 0, the sliding mode surface designed by equation (6) cannot directly go through the origin. Although the evolution speed of the sliding mode surface can be accelerated by adjusting the parameter k, the sliding mode surface cannot go through the origin in the finite time.
In order to accelerate evolution of the dynamic sliding mode surface, an improved dynamic sliding mode surface can be designed by changing the form of the function H(t). Suppose that the dynamic sliding mode surface evolves into the linear sliding mode surface at the finite given time tz, then the function H(t) can be designed as

It is easy to be proved that the function H(t) above satisfies the first condition in Lu and Chen. 14 That is, when t = 0, H(t) = H(0). For the second condition in Lu and Chen, 14 when t ≥ tz, H(0) = 0. Therefore, the function H(t) in equation (7) can have faster decay rate than the function in equation (5).
Furthermore, in order to make H(t) have the first-order derivative at t = tz, the left derivative must be equal to the right derivative at t = tz, that is

According to equation (7), the left derivative of H(t) can be calculated as

Thus, the constraint condition of the parameters can be described as

According to equation (10), when the parameters α1, α2, α, and C are selected, the evolution time tz can be determined by the numerical method. Thus, the function H(t) also satisfies the third condition in Lu and Chen. 14
For instance, set C = 0.5, α1 = 150, α2 = 100, and α = 10. From equation (7), H(t)/H(0) is shown in Figure 1. Thus, H(t) has a fast convergent rate. Therefore, the improved dynamic sliding mode surface can also rapidly evolved into the linear sliding mode surface at the time tz, which can accelerate the dynamic response of the system.

H(t)/H(0).
The function curve

The value which makes the function
FGSMC law
The reaching law is designed as

where ε > 0, which indicates that the rate of the system reaching the switching surface s = 0, and the exponential reaching term, −qs, can guarantee that the system state can tend to the sliding mode with a large rate when s is bigger.
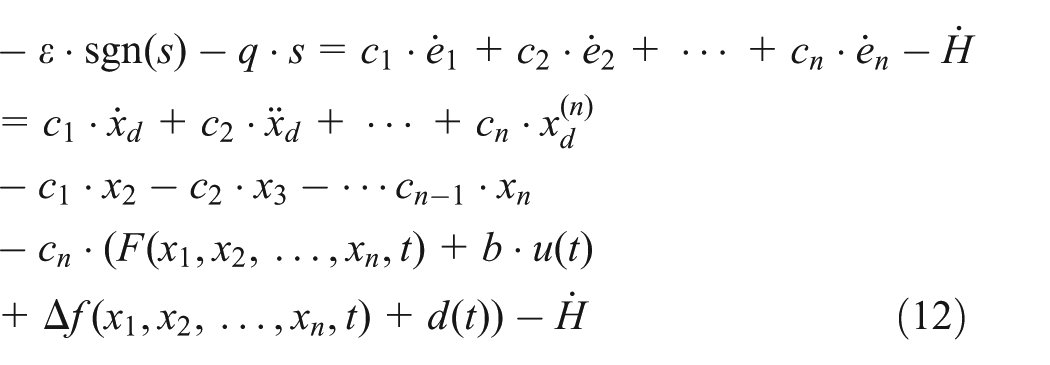
According to equations (4) and (11)
Accordingly, the control law u(t) can be designed as

Because the term [Δf(x1, x2, …, xn, t) + d(t)] is uncertainty, in order to ensure the reliability of the control law, the control law is designed as
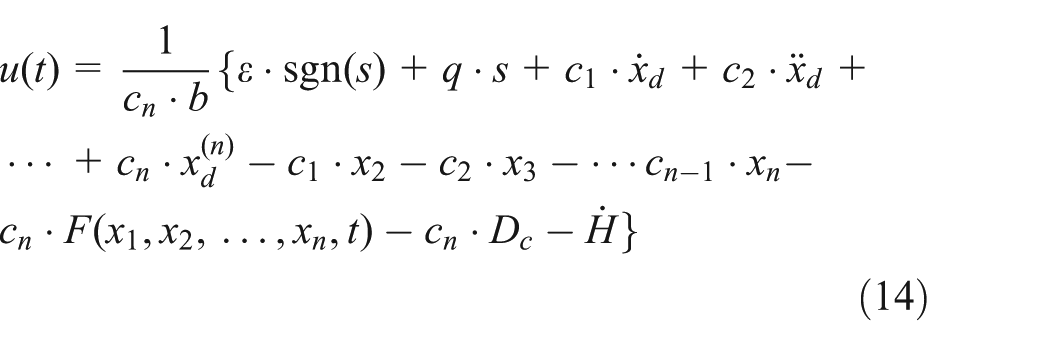
where Dc is the boundary of the uncertainty



Analyzing the stability
Choose the Lyapunov function as

The derivative of the Lyapunov function can be calculated as

when s > 0

when s < 0

Therefore, the stability of the system can be proved.
Thus, it can be seen that the improved FGSMC can not only keep the merits of the original GSMC that the reaching mode can be canceled but also have a faster dynamic response.
Simulation analysis
Some simulation experiments are performed by GSMC and FGSMC to verify the feasibility of the method proposed in this article. A two-order uncertain nonlinear system is given as follows

where b = 133, d(t) = 10 sin(πt), the desired signal is set as xd = sin7t, and the initial state is set as [x1(0), x2(0)]T = [−0.15, 0.15]T.
In the simulation experiments, the parameters of the sliding mode surface are set as c1 = 15 and c2 = 1. The parameters in the reaching law are set as ε = 0.5 and q = 10. The parameters in H(t) are set as k = 150, α1 = 150, α2 = 100, and α = 10. The value tz can be resolved as tz = 0.011 s by the numerical method.
GSMC and FGSMC are separately used to control the system in equation (22), and their position and speed tracking results are shown in Figures 3 and 4.

Tracking result obtained by GSMC: (a) position tracking and (b) speed tracking.

Tracking result obtained by FGSMC: (a) position tracking and (b) speed tracking.
The comparison results of the two methods above are shown in Figure 5.

The comparison results of the two methods: (a) position tracking, (b) speed tracking, and (c) the control input.
In Figures 3–5, the solid line represents the given desired signal, and the dashed line and the dot dashed line represent the tracking results obtained by the GSMC and the FGSMC, respectively.
According to the tracking results above, it can be seen clearly that the convergence time of the improved FGSMC method proposed in this article can be reduced. That is, compared with the GSMC method, the dynamic sliding mode surface of fast global sliding model control method can quickly evolve into the linear sliding mode surface in the finite time. Therefore, the improved FGSMC method has a faster response rate.
Application instance
A quad-rotor unmanned helicopter is a high-order, nonlinear, strong-coupling complex system. A simplified structure model of the quad-rotor unmanned helicopter is described in Figure 6.

Simplified quad-rotor unmanned helicopter model.
According to Zheng and Xiong, 22 the simplified dynamic model of the quad-rotor unmanned helicopter can be described as

where (x, y, z) denotes the position of the center of the gravity of the quad-rotor unmanned helicopter. θ, φ, and ψ are the roll angle, the pitch angle, and the yaw angle, respectively. ui represents the control law; l is the distance between the center of the rotor and the geometric center of the aircraft; Ix, Iy, and Iz are the inertias; m is the weight of the craft; g is the acceleration of gravity; and Ki is the resistance coefficient. The terms in equation (23) with the resistance coefficients are the frictional drag items which are uncertain. Therefore, there are some uncertainties in the model in equation (23), and FGSMC can be applied to control the system above.
The parameters of the quad-rotor unmanned helicopter are m = 1.4 kg, g = 9.8 kg/m2, l = 0.2 m, Ix = 0.03 kg m2,Iy = 0.03 kg m2,Iz = 0.04 kg m2,xd = 2,yd = 1, zd = 3, ψd = 0.01, K1 = K2 = K3 = 0.01 N s/m, K4 = K5 = K6 = 0.012 N s/m, and the boundary of the uncertainty D = 0.1. The parameters of the sliding mode surface are set as c1 = 1, c2 = 1, ε = 0.5, and q = 1. The parameters in H(t) are set as k = 150, α1 = 150, α2 = 140, and α = 10.
The above methods of GSMC and FGSMC are used to control the states of the quad-rotor unmanned helicopter and their simulation results are shown in Figure 7.
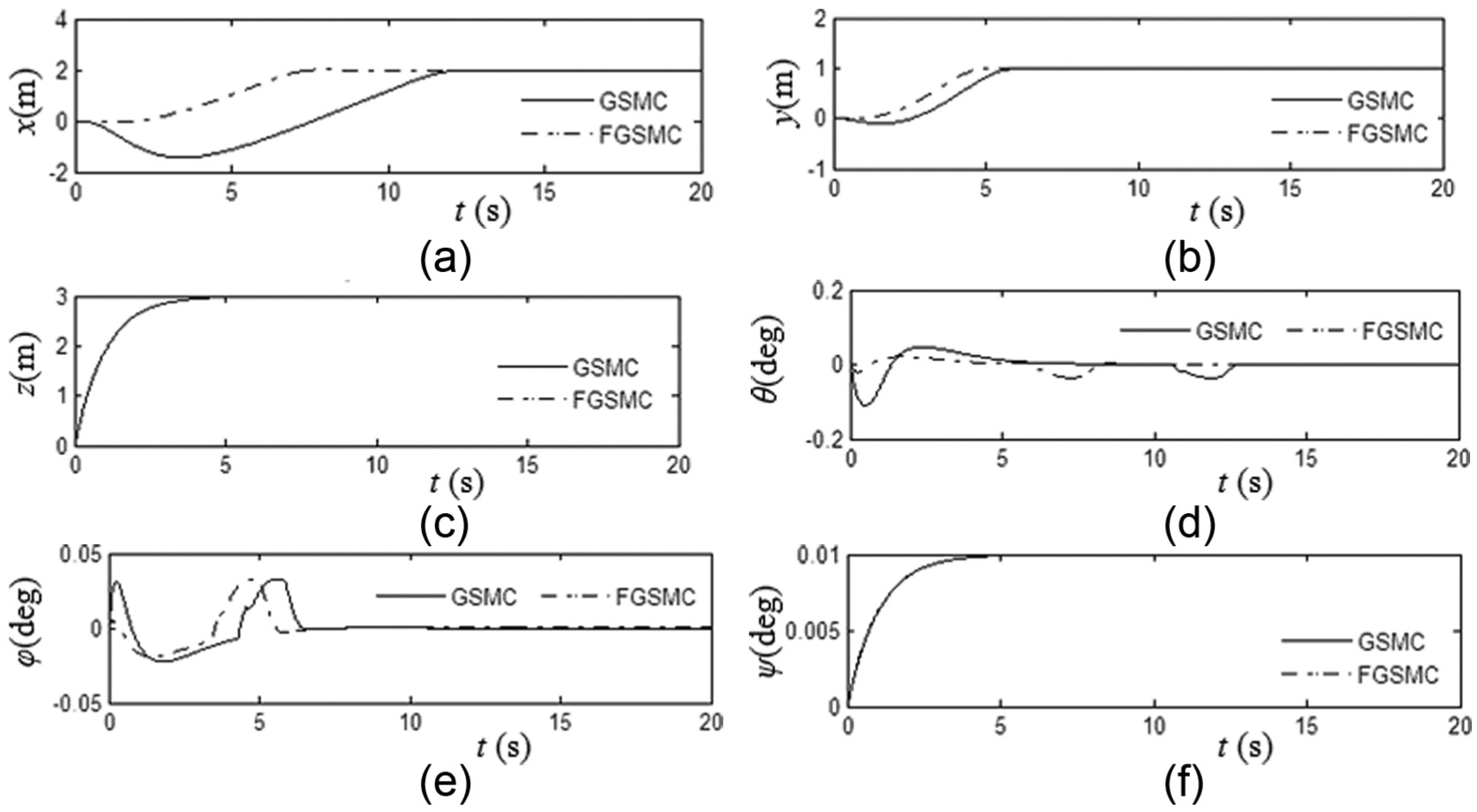
Comparison of two methods: (a) the control result of the position x, (b) the control result of the position y, (c) the control result of the position z, (d) the control result of the roll angle, (e) the control result of the pitch angle, and (f) the control result of the yaw angle.
The control inputs of GSMC and FGSMC are shown in Figures 8 and 9, respectively.

The control inputs of GSMC: (a) the control input u1, (b) the control input u2, (c) the control input u3, and (d) the control input u4.

The control inputs of FGSMC: (a) the control input u1, (b) the control input u2, (c) the control input u3, and (d) the control input u4.
The dashed line and the dot dashed line represent the control results of GSMC and FGSMC, respectively. From Figures7 to 9, it can be clearly seen that FGSMC has a faster response rate than GSMC because the dynamic sliding mode surface can quickly evolve into the linear sliding mode surface in the finite time.
Conclusion
In this article, a new FGSMC method is proposed. The exponential decay function in the sliding surface is changed as an exponential bilateral decay function which can make the dynamic sliding mode surface evolve into the linear sliding mode surface in the finite time. The method can be applied to control the uncertain nonlinear system, for instance, the quad-rotor unmanned helicopter. Simulation results show that the FGSMC method has faster response rate than the conventional GSMC method.
Footnotes
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Tianjin Research Program of Application Foundation and Advanced Technology (14JCYBJC18900) and the National Natural Science Foundation of China (61203302).