
Abstract
In order to realize the nonlinear dynamic decoupling control of a 5-degree-of-freedom bearingless induction motor which consists of a 3-degree-of-freedom magnetic bearing and a 2-degree-of-freedom bearingless induction motor, a decoupling control strategy based on least squares support vector machine inverse is proposed. First, on the basis of introducing the structure of 5-degree-of-freedom bearingless induction motor, the mathematical model is derived. At the same time, the reversibility of the mathematical model is analyzed. Second, the inverse model of 5-degree-of-freedom bearingless induction motor is identified using the regress capability for high-dimensional nonlinear least squares support vector machine within limited samples. In addition, the particle swarm optimization algorithm is used to optimize parameters of the least squares support vector machine, which improves the fitting and predictive precision of the model. Third, combining the least squares support vector machine inverse model with the original system constitutes the pseudo linear system and then proportional–integral–derivative closed-loop controllers are designed to realize the compound control for the 5-degree-of-freedom bearingless induction motor system. The dynamic decoupling control among the radial and axial displacements, speed, and flux linkage is achieved. The simulation and preliminary experiment results all verify the effectiveness of the proposed control strategy.
Keywords
Introduction
Bearingless induction motor (BIM), with the characteristics of magnetic bearing and traditional induction motor, has the advantages of nonabrasion, nonlubrication, simple structure, high mechanical strength, reliable and robust, low cogging torque ripple, and wide range of weak magnetic. It can realize the unsupported operation in high or ultra high speed. It has a broad application prospect in the field of special electrical transmission/driver, such as high-speed turbo molecular pump, high-speed and high-precision numerical control machine tool, high-speed centrifugal, agricultural robots, flywheel energy storage, and so on.1–5
At present, the research on BIM is mainly concentrated on the 2-degree-of-freedom (DOF) BIM, which is a kind of 2-DOF radial levitation system.6–9 Using a conventional self-aligning ball bearing supporting one end of the rotating shaft, 2-DOF BIM can only carry out the radial levitation experiment, and the axial levitation movement experiment cannot be realized. Therefore, this motor does not realize the complete nonbearingless. Instead of the conventional self-aligning ball bearing, the 3-DOF radial–axial hybrid magnetic bearing (RAHMB)10–12 is used in the 5-DOF BIM and the suspension control in axial DOF, and another two radial DOFs on the end of the shaft are carried out, which realizes the complete suspension control of the shaft. Therefore, it has important scientific significance and practical application value to research the 5-DOF BIM.
With complex electromagnetic relationship, 5-DOF BIM is a multi-variable, nonlinear, strong coupling time-varying system. Strong coupling exists not only between the motor torque subsystem and the rotor flux subsystem but also between radial and axial suspension force subsystems. Thus, the nonlinear dynamic decoupling control for 5-DOF BIM is necessary to realize the stable suspension of rotor and achieve stepless speed regulation under different working conditions. With the clear physical conception and simple mathematical deduction, the inverse system method has become one of the effective ways to achieve decoupling of bearingless motor system. On one hand, it provides people a comprehensive understanding of the control theory of bearingless motor system. On the other hand, it provides good theoretical basis for advanced and practical control strategy. But the inverse system model is hard to accurately obtain in engineering practice.13–15 Using the nonlinear approximation ability of neural network, neural network inverse system method can identify BIM inverse model and solve the tough problem of obtaining the accurate inverse system model, but the neural network’s own defects (local minimum, complex computation, over learning, structure type choice over relying on experience, etc.) limit the further application of the neural network inverse system method.12,16,17 Support vector machine (SVM) inverse method is a kind of nonlinear control strategy by combining the inverse system theory with SVM. Using the SVM as a general identification model of inverse system and the vector relative order of the known system, it can obtain SVM α-order inverse system through the right training. The least squares support vector machine (LSSVM) that was proposed by Suykens and Vandewalle is an extension of SVM, which turns the inequality constraints of the SVM into equality constraints and only needs to solve a linear equation. In addition, using the learning rules of structural risk minimization, the LSSVM has overcome the defects of the learning rule of empirical risk minimization of neural network. 18 It has the advantages of stable topology structure, fast training speed, and small sample learning ability, without the problems of local minimum and dimension disaster. It has been widely used in identification and control of linear or nonlinear system in recent years.19–21
Taking the 5-DOF BIM as the research object, combining the regression ability of nonlinear function of the LSSVM and the linear decoupling characteristics of traditional analysis inverse system method, this article proposes the least squares support vector machine inverse (LSSVMI) decoupling control strategy of 5-DOF BIM. On the basis of introducing the structure and working principle of 5-DOF BIM, this article analyzes the existence of 5-DOF BIM inverse system. At the same time, the LSSVM is used to identify the inverse model of 5-DOF BIM. The particle swarm optimization (PSO) algorithm is adopted to acquire the optimization parameter of LSSVM22–26 which improves the fitting and forecast precision of the inverse model. Taking the LSSVMI model as the feed-forward controller of the original system and the proportional–integral–derivative (PID) controller as a feedback controller, the compound control for the 5-DOF BIM is conducted, which realizes the dynamic nonlinear decoupling control between speed, flux, axial displacement, and radial displacement. Finally, the simulation and the preliminary experiments verify the correctness and effectiveness of the proposed control strategy.
Basic structure and mathematics model of 5-DOF BIM
The 5-DOF BIM consists of the units of 3-DOF RAHMB and 2-DOF BIM. Due to the 3-DOF RAHMB replacing the conventional self-aligning ball bearing, the 5-DOF BIM implements the suspension control of an axial DOF and the other two radial DOFs on the end of the shaft. Consequently, the rotor has been effectively suspended in five DOF positions and realizes the completely bearingless of the BIM. The structure diagram of 5-DOF BIM is shown in Figure 1.
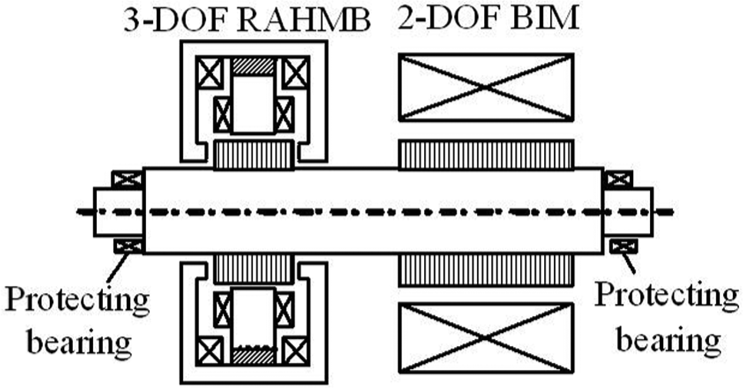
Structure diagram and physical diagram of 5-DOF BIM.
The structure diagram of 3-DOF RAHMB is shown in Figure 2. The 3-DOF RAHMB consists of radial control coil, 3-pole radial stator, axial control coil, axial stator, permanent magnet, and rotor. The permanent magnet is made from the rare earth permanent magnet material NdFeB, and the iron core of radial stator is composed of stacked silicon steel sheet. For the 3-DOF RAHMB, the radial adopts alternating current (AC) excitation and the axial adopts direct current (DC) excitation, and the radial magnetized permanent magnet provides the bias flux of the axial–radial. Therefore, with the characteristics of permanent magnet bias and AC excitation, the 3-DOF RAHMB has the advantages of compact structure, high efficiency, flexible control, low cost, low loss, and so on.

Structure diagram of 3-DOF RAHMB.
When the 3-DOF RAHMB works, the three coils (A, B, and C) of 3-pole radial stator are evenly distributed along the circumference by 120°. The two radial DOFs are controlled by adjusting the compound rotating magnetic field produced by the three-phase AC in the three coils, and the single axial DOF is controlled by the two axial coils in the axial stator. When the 3-DOF RAHMB is suspended steadily, the static biased magnetic field generated by the permanent magnet makes the rotor in the reference balance position.
Mathematical model of 3-DOF RAHMB radial–axial suspension force
Using the subscript l expresses the related variables of 3-DOF RAHMB; xl, yl, and zl represent the displacement in radial x and y and axial z of the rotor of 3-DOF RAHMB, respectively; ilx, ily, and ilz represent the corresponding control current of the radial x and y and axial z, respectively. According to the equivalent magnetic circuit method and virtual displacement theorem, the radial–axial levitation force of the 3-DOF RAHMB can be shown as follows 8

where Flx, Fly, and Flz are the suspension forces of radial x and y and axial z, respectively; kxy and kixy are the radial force/the displacement stiffness and displacement force/the current stiffness of 3-DOF RAHMB, respectively; and kz and kiz are the axial force/the displacement stiffness and displacement force/the current stiffness of 3-DOF RAHMB, respectively; the specific equations can be shown as follows

where Fm is the magnetic motive force of permanent magnet; µ0 is the permeability of vacuum; Nr and Nz are the turns of the radial and axial control coil, respectively; Sr and Sa are the magnetic pole areas of radial and axial, respectively; and δr and δa are the air-gap lengths of radial and axial, respectively.
Mathematical model of 2-DOF BIM
BIM is a new type of motor which breaks through the traditional motor theory of keeping the balance of air-gap magnetic field to produce electromagnetic torque. Using the structure similarity between the magnetic bearing and motor stator, BIM is formed by embedding another radial levitation force windings based on the existing windings in the stator of ordinary induction motor. Through adjusting the current in the radial levitation force windings, the symmetry of air-gap magnetic field is destroyed and thus produces torque and suspension force so as to realize the suspension and rotation functions.
Using the subscript r expresses the related variables of 2-DOF BIM. The virtual displacement method is adopted to deduct the radial suspension model of 2-DOF BIM. The inductance matrix [L] is shown as follows 2

where the torque winding self-induction L1s and suspension force winding self-induction L2s are constants; xr and yr are the radial displacements in the directions of x and y of the 2-DOF BIM rotor, respectively; and M is the mutual inductance of the two sets of winding. According to the relationship of energy conversion, the equation of magnetic energy storage by 2-DOF BIM can be written as follows

where the current matrix is
Substituting formula (3) into formula (4), the following can be obtained

According to the virtual displacement principle, the suspension force model of the 2-DOF BIM is as follows 21

The electromagnetic torque Te of 2-DOF BIM in the synchronous rotating coordinate d–q can be shown as follows 1

where P1 is the number of pole-pairs of torque winding; Tr is a constant of rotor time; Lm1r is the mutual inductance between torque winding and rotor; and ψdr and ψqr are the components of rotor flux in d–q-axis, respectively.
Mathematical model of 5-DOF BIM
Figure 3 shows the stress analysis diagram of rigid rotor for the 5-DOF BIM. In this diagram, the coordinate origin o represents the center of mass; x, y, and z are the coordinate axes of the rotor; m is the mass of the rotor; ω is the angular velocity of rotor; J is the rotational inertia; TL is the load torque; and flx, fly, flz, frx, and fry are the outside disturbances in the xl, yl, zl, xr, and yr directions, respectively. The equations of motion of the system can be obtained from the rotor dynamics theory as follows


Rotor stress analysis diagram.
The state variables are selected as follows

The input variables are as follows

The output variables are as follows

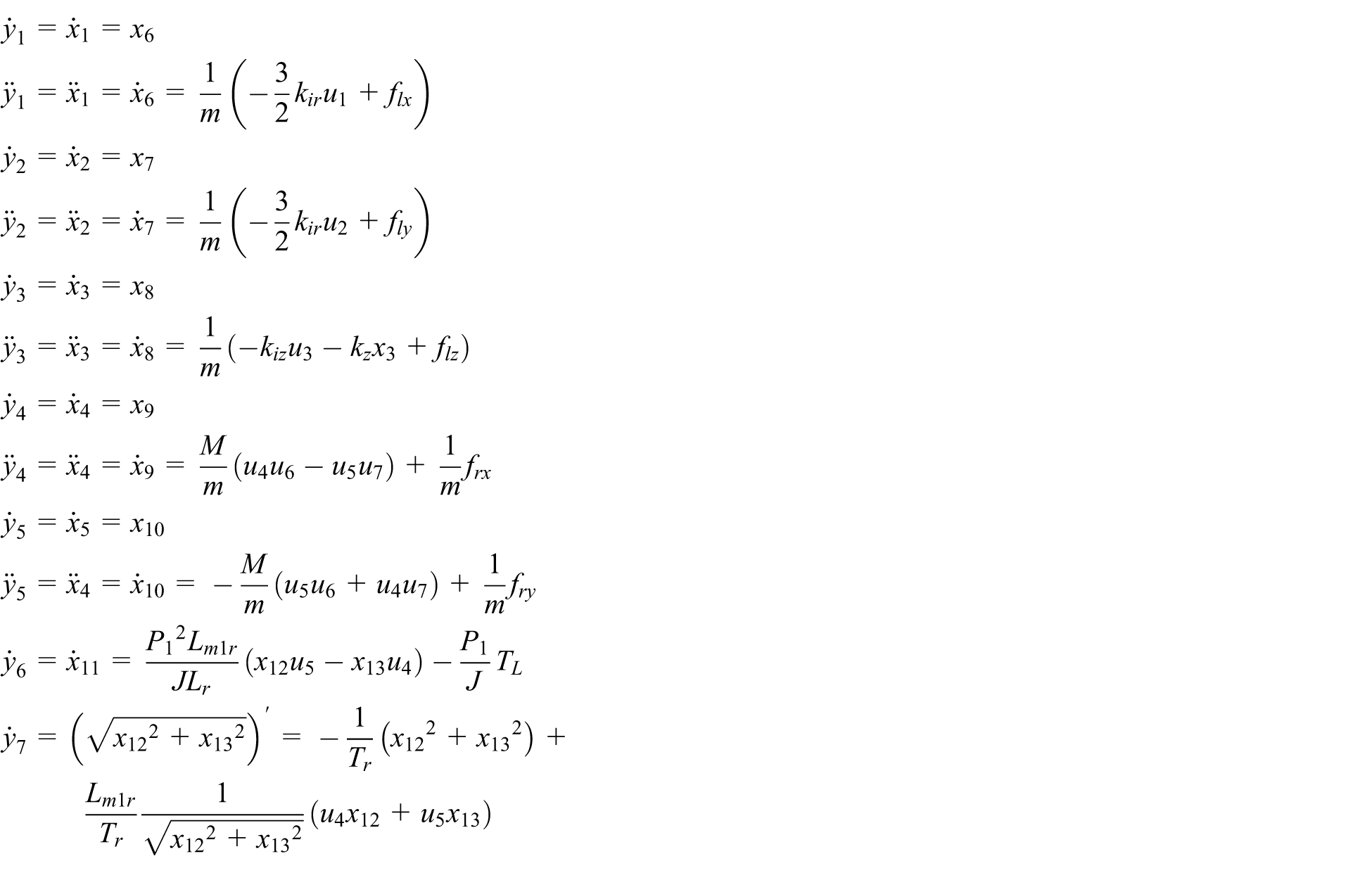
Substituting equations (1), (6), (7), and (9–11) into equation (8), the 13-order state equation of the system can be acquired as follows

Reversibility analysis of 5-DOF BIM
To analyze the reversibility of 5-DOF BIM, it needs to keep differentiating the output with respect to time until the input variable exists in the equation. From equation (12), the following equations are obtained
The Jacobian matrix is as follows

A(x) is nonsingular, rank[
LSSVMI decoupling control of 5-DOF BIM
Identification principle of LSSVM
The identification principle of LSSVM is known that the regress of unknown functions can be realized by selecting a function y(

where γ and εi are the relaxation factors of the regularization parameter and the insensitive loss function, respectively. From the Lagrange function of (15), it can be known that the optimization problems of the expression (14) can be solved as follows

where ai is the Lagrange multiplier. According to the optimal conditions of Karush–Kuhn–Tucker, by calculating the partial derivatives of Lagrange function, the answers of optimization problems are shown as follows

where K(xi, yj) is the kernel function which satisfies the Mercer condition. This article chooses the radial basis function (RBF) kernel function as the following form

where σ is the width of the kernel. From formula (16), a and b can be obtained, and from formula (15) ω can be obtained. The fitted equation of (xi, yi) can be obtained as follows

Parameter optimization of LSSVM model
This article uses the PSO algorithm to optimize the kernel width of LSSVM and the regularization parameters. The PSO algorithm is a kind of swarm intelligence optimization technique, which was proposed by Kennedy and Eberhart 24 in 1995. Assuming that a group consists of m particles in the D dimension, the ith dimension is expressed as follows

where


where r1 and r2 are the random numbers in (0, 1); c1 and c2 are the learning factors; and
The sample mean square deviation eRMSE can be built such as equation (22), which is the performance evaluation index of LSSVM and the objective function of the PSO algorithm

where yi and
Implementation procedure
Data sample collection. Through the closed-loop PID control of 5-DOF BIM, the training data samples can be obtained. According to the physical operation area of 5-DOF BIM, the given random excitation signals of the speed, flux, and rotor position can be set to collect the response of the real-time system. The training samples of the 5-DOF BIM inverse model are {
LSSVM training. According to the input and output sample data of the LSSVM, the LSSVM is trained, and the 5-DOF BIM inverse model is established. What is more, the PSO algorithm is adopted to optimize the kernel width σ and the regularization parameters γ, so as to make the output value of LSSVM approach to the expectations.
Implementation of LSSVM control. Adding the integrator (S−1) to the trained LSSVM builds the LSSVMI of 5-DOF BIM, which is used as the feed-forward controller in front of the original system. The pseudo linear system consists of LSSVMI and the original system; of which, the input and output are linear decoupling. The pseudo linear system is equivalent to seven decoupling integral linear subsystems. They are five-position second-order integral subsystems, a speed first-order integral subsystem, and a magnetic first-order integral subsystem, respectively. The corresponding transfer functions are Glx(S) = S−2, Gly(S) = S−2, Glz(S) = S−2, Grx(S) = S−2, Gry(S) = S−2, Gω(S) = S−1, and Gψ(S) = S−1. In order to obtain the excellent static and dynamic performances of 5-DOF BIM, the closed-loop controller is designed for pseudo linear subsystems. In this article, the feedback controller is the PID controller with differential limit and integral separation links. Figure 4 shows the LSSVMI decoupling control block diagram of 5-DOF BIM system.
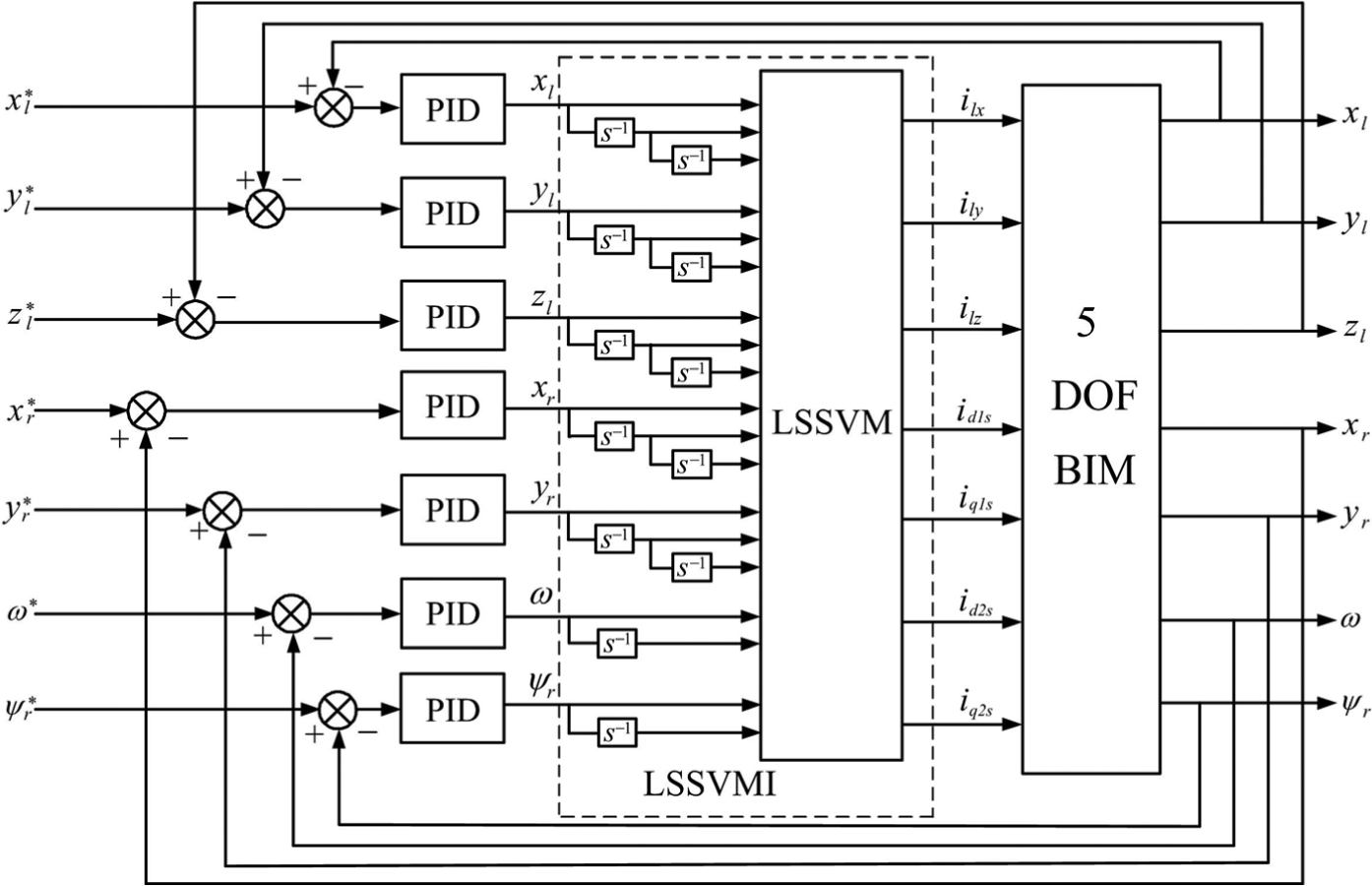
Decoupling control block diagram of the 5-DOF BIM.
Simulation and experimental research
Parameters of prototype
The parameters of 3-DOF RAHMB are shown in Table 1 and the parameters of 2-DOF BIM are shown in Table 2.
Parameters of 3-DOF RAHMB.

Parameters of 2-DOF BIM.

Simulation analysis
The simulation parameters of PSO are as follows: m = 60, D = 2, c1 = c2 = 2, the number of termination iterations is k = 300, and the attenuation of

In order to test and verify the effectiveness of the LSSVMI model, the inverse model of 5-DOF BIM is built based on the classic SVM and PSO-LSSVM, respectively. Comparing the εRMSE with the εMAXE in the 400 groups of the selected test data, the results are shown in Table 3. It shows that the 5-DOF BIM inverse model built by the PSO-LSSVM has better fitting ability and prediction precision.
Comparison of the two kinds of model prediction effect.
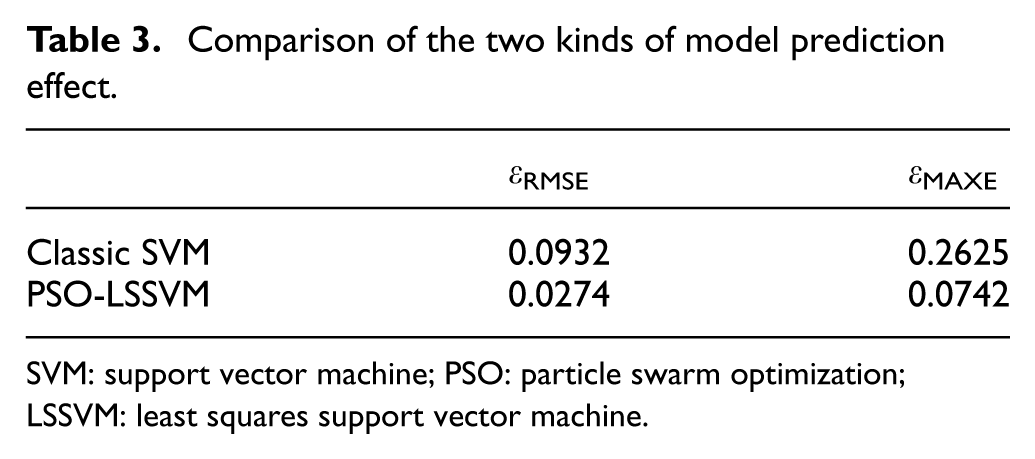
SVM: support vector machine; PSO: particle swarm optimization; LSSVM: least squares support vector machine.
When the rotor of 5-DOF BIM is in the stationary state, xr = xl = x and yr = yl = y. Figure 5 shows the centroid trajectory of the 5-DOF BIM rotor without load. Assuming the rotor initial displacement value is x = −0.1 mm, y = −0.1 mm. From Figure 5, it can be seen that the rotor centroid trajectory is smooth in the process of rotor floating, and the trajectory can approach to the equilibrium point (0, 0) quickly. It realizes the stable suspension at the equilibrium point. At the same time, the coupling of each DOF is small. The system has good dynamic and static performance.

Trajectory of the rotor centroid.
In order to verify the decoupling effect of LSSVMI, the system given values change at different time. Figure 6 shows the decoupling effect of speed, flux, and radial displacement in the x-axis of the 5-DOF BIM. Figure 6(a) shows the speed characteristic curve of 5-DOF BIM; Figure 6(b) shows the flux characteristic curve of 5-DOF BIM; Figure 6(c) shows the characteristic curve of radial displacement in the x-axis of 5-DOF BIM. When t = 0.06 s, the flux drops suddenly from 0.8 to 0.4 Wb; when t = 0.1 s, the speed increases suddenly from 3000 to 6000 r/min; when t = 0.12 s, the radial displacement in the x-axis decreases suddenly from 0.18 to 0.12 mm. It can be seen from Figure 6 that the curve response is rapid, the overshoot is small, and one input only affects its own output. Therefore, this system implements the decoupling between speed, flux, and displacement.
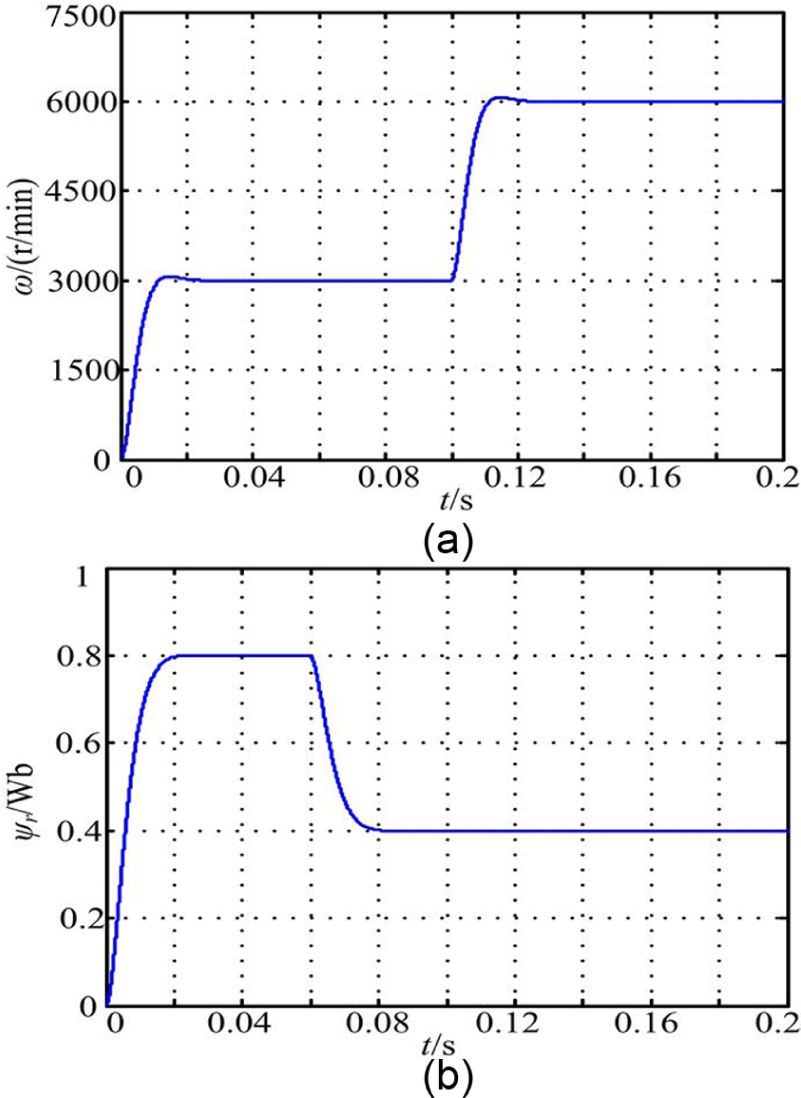
Decoupling effect curve between (a) speed, (b) flux, and (c) x direction displacement.
Figure 7 shows the decoupling effect between x, y, and z direction displacements of 5-DOF BIM. When t = 0.06 s, the displacement in the y direction increases suddenly from 0.05 to 0.15 mm; when t = 0.11 s, the displacement in the x direction changes suddenly from 0.2 to 0.1 mm. The decoupling control result is shown in Figure 7(a). From Figure 7(a), it can be known that one input only affects its own output in the x and y directions; when t = 0.04 s, the displacement in the z direction changes suddenly from 0.175 to 0.125 mm; when t = 0.08 s, the displacement in the x direction changes suddenly from 0.05 to 0.13 mm; the decoupling control result is shown in Figure 7(b). From Figure 7(b), it can be found that one input only affects one output in the x and z directions. Therefore, the system realizes the good decoupling control performance for displacement in the x, y, and z directions.

Decoupling effect curve between (a) x and y direction displacement and (b) x and z direction displacement.
Experimental analysis
In order to further verify the effectiveness of the LSSVMI decoupling control strategy, the digital control experiment platform is established with a 2-DOF BIM based on the TMS320F28335. In this experiment, the eddy current displacement sensor is used to measure the displacement of x and y directions, and the incremental photoelectric encoder is used to measure the speed. In addition, the commonly current speed observer is used to observe the rotor flux. The LSSVMI control algorithm is realized by the TMS320F28335. The experimental results are shown in Figure 8.
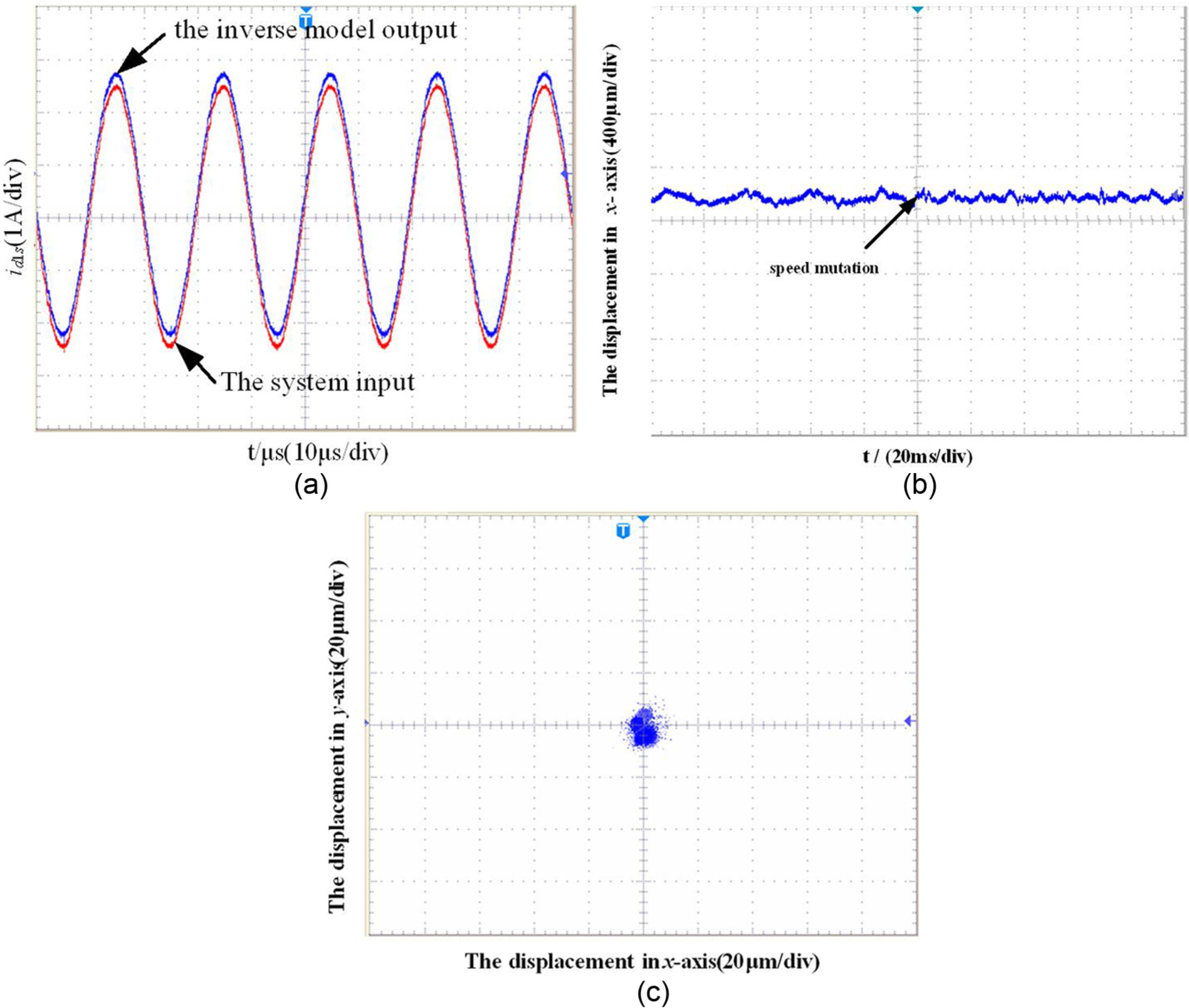
Experimental results: (a) the system input and LSSVMI model output, (b) x direction displacement under speed mutation, and (c) the rotor centroid trajectory.
Figure 8(a) shows the input current id1s of system and the corresponding output model current based on LSSVMI. It can be seen from Figure 8(a) that the LSSVMI model has good regress for the input of system, which means that the LSSVMI model optimized by the PSO optimization algorithm has higher fitting and forecasting precision. Figure 8(b) shows the waveform of the displacement in the x direction when the speed suddenly increases from 1200 to 2400 r/min. When the motor speed increases suddenly, the radial vibration amplitude of rotor at the center equilibrium position keeps steadiness, and the peak–peak value is <40 µm. It implements the dynamic decoupling between the speed and the radial displacement. Figure 8(c) shows the waveform of rotor centroid trajectory when the speed is 2400 r/min. The rotor centroid trajectory distributes at the intersection point of x- and y-axes (around the center of equilibrium position). The maximum values of the centroid displacement in the x- and y-axes are 16 and 20 µm, respectively. The motor is in a stable suspension state. From Figure 8(a)–(c), it can be known that using the new decoupling control strategy, the rotor realizes the steady and dynamic suspended operations, and the performance of decoupling control is good.
Conclusion
In order to achieve the high-performance control of 5-DOF BIM, the LSSVM inverse control strategy based on the PSO optimization algorithm is proposed to research the nonlinear decoupling control, and the conclusions are as follows:
The nonlinear decoupling control of 5-DOF BIM system is realized successfully by LSSVMI decoupling control strategy, and the simulation results illustrate that the system has excellent dynamic and static performances, and it has strong robustness to the model errors.
In order to identify the inverse system model better by LSSVM, the PSO algorithm is applied to optimize the LSSVM parameters. The simulation and preliminary experiments show that the inverse model has a higher fitting and predicted precision.
Limited by the experiment conditions, the experiment research is carried out on the digital control experiment platform with a 2-DOF BIM. It realizes a dynamic decoupling control between the speed and displacement and verifies the effectiveness of the proposed control strategy, which also, creates solid foundation for the next step to achieve the experiment research based on the LSSVMI 5-DOF BIM.
Footnotes
Academic Editor: José Tenreiro Machado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under projects 51475214, 61104016, and 51305170; the China Postdoctoral Science Foundation–funded project under project 2015T80508; the Natural Science Foundation of Jiangsu Province of China under projects BK20130515, BK20141301, and BK20150524; the Professional Research Foundation for Advanced Talents of Jiangsu University under projects BK20150524 and 14JDG076; Six Categories Talent Peak of Jiangsu Province under projects ZBZZ-017 and 2015-XNYQC-003; and the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).