
Abstract
The traditional complex mode theory is substantially improved. By means of the conjugacy of the complex characteristic value and vector, the formulae to compute the accuracy solution to the time-domain dynamic response for a symmetrical system with generalized linear viscous damping are established. Based on the formulation constructed, the truncation of the complex mode superposition is investigated. By employing the complex mode expansion of the system flexibility matrix discovered in this work, an accelerating method for the complex mode superposition after truncation is proposed. According to such improved complex mode theory, the system dynamical parameters, for example, the natural frequency and the complex vibration shape, are all the functions with respect to the mass, stiffness, and damping. However, the influence of the damping on the natural frequency may always be relatively slight. The numerical simulating investigation shows that the precise dynamic response can be obtained simply and conveniently in line with the formulae established. Meanwhile, the truncating and accelerating methods are effective for both the narrow or wide band external excitation and can provide the approximate solution to the dynamic response with better precision even when the frequency of the excitation is higher. Under certain conditions, the accelerating approach can be used to boost the accuracy of the truncated response.
Keywords
Introduction
Generally speaking, if the damping of a symmetrical multi-degree-of-freedom system is generalized linear viscous, the dynamic response of the system commonly needs to be worked out by means of the complex mode method in time domain. The reason essentially is that the damping matrix of such a system cannot be represented as the linear combination of its mass and stiffness matrices.
In the late 1950s, the study on the complex mode theory started from the work of Foss
1
on the state space approach to solve the dynamic response of a damped linear system. Afterward, Schmitz
2
developed the thought of Foss and preliminarily constructed the fundamental formulation for the complex mode theory. Nevertheless, he did not provide any numerical example. In the methods proposed by Foss and Schmitz, the n governing differential equations of motion of second order should be transformed to the
After coming into 1980s, Li 5 studied the relation between the complex and real modes. Meanwhile, the complex mode method was included in some monographs6–8 and textbooks9,10 for postgraduate students on mechanical vibration. In addition, the idea of the complex mode has been embedded into the component mode synthesis successfully. 11 On the other hand, the complex mode theory has been applied in the experimental modal testing widely.12,13
All these seem to show that the complex mode science has been mature. However, in the opinion of the author, it is not so at all. The deficiency mainly exists at least in three aspects. First, the quadratic eigenvalue problem generally cannot be solved using full-blown commercial computing software easily and directly. Second, the arithmetic of real number inextricably commingles with complex operation and this often results in an outcome with bad precision. Third, unlike the status of the real mode, the truncation and acceleration of the complex mode superposition have not been studied until recently. Unfortunately, in the past decade or so, there is almost no progress in such fields from the perspective of the literature in the mainstream journals.
In this work, the traditional complex mode theory is ameliorated considerably. The complex eigenvalue and eigenvector are proposed to be obtained by means of solving the generalized characteristic value problem in respect of the augmented matrices, which are the partitioned matrices made up to by the mass, stiffness, and damping matrices of the system. Hence, the trouble to solve the quadratic eigenvalue problem in the traditional complex mode theory can be kept away completely. In accordance with the classical complex mode philosophy, the dynamical response is generally attained by virtue of the integration transformation technique after knowing the complex characteristic value and vector. In the methodology suggested, the response is directly attained in time domain by making use of the artifice to separate the real and imaginary parts. Clearly, the new approach is more simple and convenient. On the basis of the orthogonal relation between the complex modes, the system flexibility matrix can be expanded as the superimposing summation of the complex modes. On the strength of this, the truncation and acceleration of the complex mode superposition are discussed in detail. An accelerating technique is put forward for the complex mode superposition after truncation. In addition, the utilization of the trick to separate the real and imaginary parts leads up to the avoidance of the mixture of the real and complex operations. This obviously is beneficial to improve the computing precision of the dynamical response.
Improved complex mode theory
Complex eigenvalue and complex mode of vibration
The governing differential equation of motion for a N-degree-of-freedom linear system can be represented as follows

whose initial conditions are

where
Equation (1) may be transformed into the state equation for the system as below

where
Letting

where
Letting

Because both
By taking advantage of the determinant computing approach for the partitioned matrix,
15
the determinant value of the matrix

Thereby the matrix

where
Apparently the characteristic polynomial of the real square matrix
where
Provided the system in question does not have repeated complex proper value, it is easy to build the orthogonal relation between two different state complex mode vectors from equation (5), which can be expressed as

Under the condition of no repeated complex proper value,
With the aid of equation (9), both the matrices

where
By right of equations (5) and (9), the relationship among

In order to ensure the stability of the system vibration, the real part of
Owing to the conjugacy of the

where
Furthermore, corresponding to the natural frequency

Equation (13) shows that, under the condition of the generalized viscous damping, the oscillation of the system can always pertain to the under-damped case in general.
On the basis of

where
The complex mode vector

where

where
After substituting equation (16) into the expression of

where
On the other hand, from equation (15), it is easy to procure

where
It is not difficult to understand that the intrinsic dynamical characteristics of the system, including the natural frequency and the complex mode, are all the functions regarding the mass, stiffness, and damping in accordance with the improved complex mode theory established here. Nonetheless, the situation in the real mode theory is far from this. There the intrinsic dynamical characteristics solely are functions regarding the mass and stiffness because the damping matrix always is dealt with to be the linear combination of the mass and stiffness matrices in terms of the Rayleigh assumption. From such a perspective, the improved complex mode theory proposed in this study is more impeccable and rigorous.
Treatment of initial condition
With the help of equation (10), letting

As already stated, the state complex vibration shape matrix,

In view of equations (2) and (20), the initial condition in respect of equation (19) can be established as below

where
Accurate solution to dynamic response
Equation (19) is a linear non-homogeneous ordinary differential equation of first order with regard to

After the coordinate transformation, the accurate solution of equation (1) can be acquired from equation (22) and the result is

From equation (23), making use of equation (18) and taking into account the conjugacy, the total response of the system in time domain can be represented as
where

where
As shown by equation (24), the total dynamic response of the system consists of two parts. One is,
After transformation, the integral in equation (24) may have the roughly same form with the Duhamel integral, that is, the convolution integral, 17 in the real mode theory. Consequently, these integrals in equation (24) can be called the generalized Duhamel integral, which can be expressed as
In such integrals,
Resorting to the preceding concept of the generalized Duhamel integral, the representation of the total dynamic response can further be reduced to

Generally speaking, it is simpler to obtain the time-domain response for a symmetrical system directly from equation (27) because it need not be with the aid of the integral transformation. 18 Concurrently, the number of the equation essentially is not increased, nor is the quadratic eigenvalue problem required to be solved.
Truncation of complex mode superposition and related acceleration method
Truncation of complex modes superposition
At heart, the approach to obtain the response from equation (27) should pertain to the superposition of the complex modes in time domain. By employing such an approach, the accurate response can be worked out. However, if the number of the degree of freedom is relatively large, the preceding approach to search for accurate solution may be difficult or inconvenient to be implemented at least to some degree. To handle this challenge, one way is to truncate the summation of the complex modes in equation (27) and the outcome truncated can be represented as

where
In fact, equation (28) can be viewed as the truncation of the complex mode superposition, which can merely present an approximate solution to the dynamic response. However, the relevant computing workload is sure to be notably slighter. Given this, the investigation on how to truncate the complex mode superposition rationally is of great significance.
The truncation of the real mode superposition, covering the corresponding accelerating method, has been discussed in detail in the literature.9,19 Nevertheless, the truncation of the complex mode superposition and the related accelerating method have never been reported until nowadays as far as the author has known.
Acceleration of complex mode superposition after truncation
So as to enhance the accuracy of the truncated approximate solution, the accelerating method of the complex mode superposition after truncation needs to be discovered. For this, the complex mode expansion of the flexibility matrix of the system ought to be established in advance.
From equation (10), the inverse matrix of the matrix

By comparing with the counterparts of the partitioned matrices on both sides of equation (29), the following equivalence relations can be constructed as
where
It is assumed that the initial condition is zero and the external excitation is simple harmonic, that is,

On the basis of equation (8), the relationship between the state vector,

such that the relationship between
If both the complex vibration shape matrix

Substituting equation (31) into equation (33) yields an approximate solution to the response under the zero initial condition. By right of the complex mode expansion of the flexibility matrix in equation (30), the result acquired can be simplified to

From equations (17) and (18), it is possible to have
where
In terms of the conjugacy, from equation (35), it is easy to obtain

Substituting equation (36) into equation (34) and making utilization of equation (28), an accelerated approximate solution to the response after the truncation during the complex mode superposition can be attained as

where

Equation (37) is the computing formula for the approximate dynamic response by adopting the accelerating method of the complex mode superposition after truncation. In comparison to equation (28),
Numerical example investigation
The main goal of this section is to research the characteristics of the truncation and acceleration of the complex mode superposition via the numerical examples. To this end, a 5-degree-of-freedom system, as shown in Figure 1, is taken into consideration. The mass, stiffness, and damping matrices of the system are


in which

Physical structure of the system in question.
After solving eigenvalue problem equation (7), the natural frequencies of the system can be obtained, which are listed in Table 1. For the sake of contrast, the natural frequencies without damping are listed in the same table as well, which are attained by means of the real mode method. Table 1 shows that, strictly speaking, the damping effect makes the lower order natural frequencies rising while makes the higher order natural frequencies decreasing. However, the influence of the damping on the natural frequency is rather limited.
Natural frequencies of the system.

Because of the pair-wise conjugacy among the 10 complex modes, only 5 complex modes among them are given in Table 2. The subscripts reflect the corresponding relation between the complex mode and the related inherent frequency. In addition, the complex modal damping ratios are tabulated in Table 2.
Complex modes and complex modal damping ratios of the system.

Hereinafter two cases of the external excitation are studied: the simple harmonic excitation and the slope step excitation.
Simple harmonic external excitation
In this case, the external excitation is

where
Substituting equation (41) into equation (27), the response of the system caused by the simple harmonic external excitation can be worked out as

where in accordance with the formulae in equation (24),


On the other hand, the generalized Duhamel integrals can thus be reduced and the integral outcomes acquired in equation (42) are denoted by


where
The initial condition is presumed to be

Taking advantage of the expressions of
Then, the response caused by the initial condition,

Accurate response curves under simple harmonic excitation
From equations (45) and (46), it is easy to make clear that the full response contains three parts: the damped vibration aroused by the initial condition, the damped vibration triggered by the external excitation, and the simple harmonic vibration under the same frequency with the simple harmonic excitation. Evidently the first two parts are both the attenuation vibration and the last one is the steady-state vibration caused by the external excitation. In consequence, only the third part vibration, namely, the steady-state simple harmonic vibration, can be reserved after an enough long time. Figure 2 reflects such characteristics definitely.
As an example for the lower frequency and narrow band external excitation, the frequency of the simple harmonic external excitation is selected to be
The truncated and accelerated responses,

Curves of
As manifested in Figure 3, if the external excitation mostly covers the low-frequency ingredient, truncating the complex vibration shape superposition at the lower order mode may give rise to a good approximate solution. Moreover, the precision of the truncated approximate solution can be further improved with the aid of the accelerating method given in equation (37). In fact, the remarkable difference between the precise response and the proximate response, including the truncated response and the accelerated response after truncation, may invariably take place at the peaks of the response curve as demonstrated in Figure 3.
Now investigate another instance with the higher frequency and narrow band external excitation, in which

Curves of

Curves of

Curves of
In Figure 4, the red and blue lines are almost coincident with each other. In Figure 6, the two lines are well coincident in most of the time except a short period of time at the beginning. In Figure 5, the two lines coincide slightly worse. Plainly, even under the circumstance of the high-frequency external excitation with narrow bandwidth, if the truncation is placed at the high-order mode, the precision of the truncated response may still be satisfactory. Meanwhile, if the truncation takes place at the higher order complex mode, the acceleration after the truncation may lose its own significance.
From equations (45) and (46), it is uncomplicated to know

such that
Slope step external excitation
The expression of the slope step external excitation can be expressed as

where

Graph of the slope step function
With the aid of equation (68) in Appendix 2, the amplitude spectrum of the slope step function,
where
From equation (27), the response caused by the slope step external excitation over the time interval

where by right of equations (76) and (79) in Appendix 2, it is undemanding to have


where
Similarly, the response caused by the slope step external excitation over the time interval

where with the aid of equations (71) and (75) in Appendix 2, it is possible to attain

If presuming that
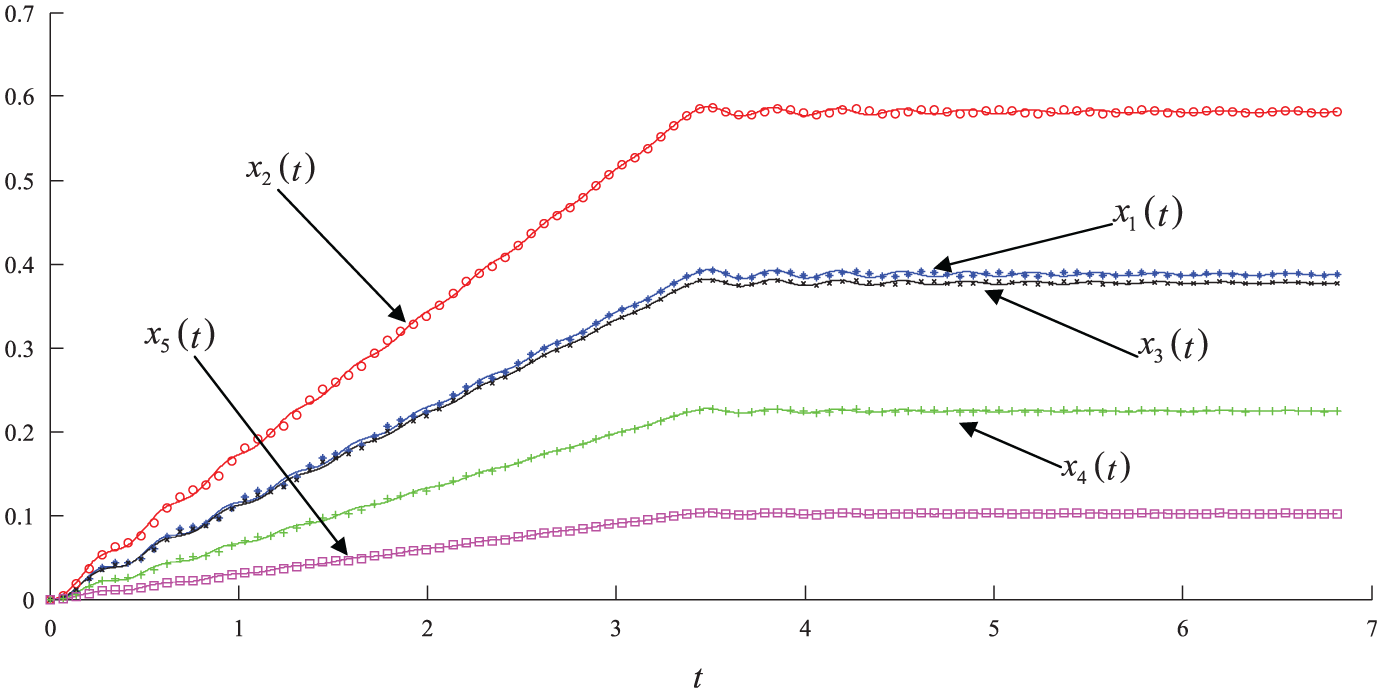
Response curves under slope step external excitation.
Equations (52) and (55) state clearly that the total dynamic response,
Here, the truncating and accelerating characteristics of the responses of the masses 1 and 3 are selected to be the instances for investigation. The images of
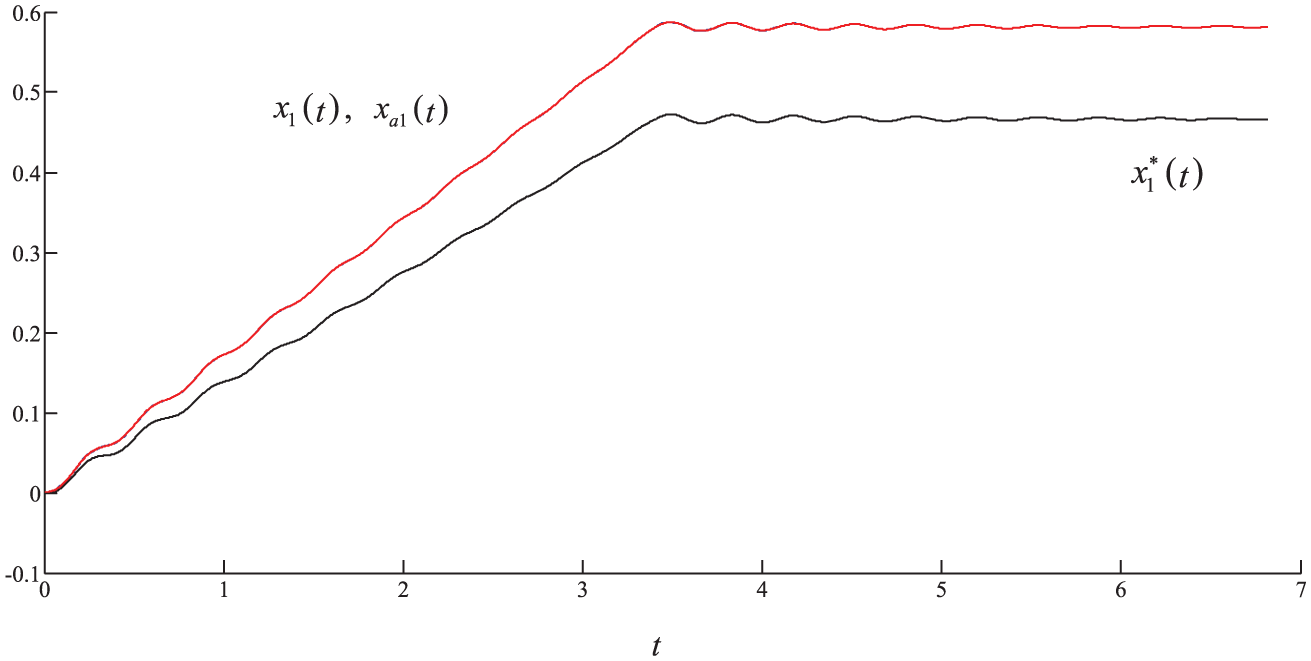
Graphs of
In Figure 10, the graphs of

Graphs of
Although the slope step excitation belongs to the broadband excitation, its leading energy chiefly distributes over the lower frequency ingredient as shown by the expression of its spectrum, that is, equation (51). Therefore, the truncation and acceleration can give rise to a nice proximate solution for the dynamical response like the case of the low-frequency excitation even if the truncation occurs at the lower order complex mode.
Conclusion
For a symmetrical system with general linear viscous damping, a method to solve its accurate dynamic response is proposed. In essence, the method is an improvement of the traditional complex mode technique. In the process of employing such an approach, the number of the differential equations to be solved need not be increased actually although the concept of state equation is quoted. Meanwhile, solving quadratic characteristic value problem is not required. In addition, by reason of taking advantage of the conjugacy of the complex characteristic value and vector, the complex operation is avoided completely. In comparison with the integration transformation method, the improved complex mode method suggested is more simple and convenient because it pertains to the time-domain method essentially and the integration transformation is not needed.
The truncation approach of the complex mode superposition is proposed and investigated using the improved complex mode theory established. The complex mode expansion of the flexibility matrix of the system and some other important and basic relations are discovered. Based on these, an accelerating method of the complex mode superposition after truncation is put forward.
For the low-frequency excitation with narrow band, only keeping the lower order modes during the superposition and accelerating the truncated solution can generally give a good approximate solution to the dynamic response. Under such circumstance, the accelerated solution after truncation is always more accurate than the pure truncated one.
With regard to the high-frequency excitation with narrow band, the higher order modes should usually be reserved in the superposition to guarantee the accuracy of the truncated solution. Under such a condition, the acceleration after truncation may not be necessary.
As to the broadband excitation, if the superimposition only comprises the complex modes of the lower orders, a nice approximate solution to the dynamical response can also be obtained in general. Furthermore, the acceleration after the truncation can be utilized to enhance the precision of the truncated solution.
Footnotes
Appendix 1
Appendix 2
Academic Editor: Elsa de Sa Caetano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research work in this paper was fully supported by National Natural Science Foundation of China under Grant No. 51475083, New Century Excellent Talents Project by Education Ministry of China under Grant No. NCET-13-0116, National Key Basic Research Development Plan of China (the 973 Program) under Grant No. 2014CB046303, and Excellent Talents Support Program in Institutions of Higher Learning in Liaoning Province China under Grant No. LJQ2013027.