
Abstract
This article provides systematic analysis and controller design methods for dynamic tracking performance of servo mechanisms associated with practical systems. Discrete general composite nonlinear feedback, as a fundamental controller, will be proposed to yield a good transient performance. Particularly, in the servo systems, there also exist unmodeled disturbances which may lead to tracking errors. A novel repetitive control scheme based on disturbance observer configuration is incorporated into the controller to counteract this unexpected effect. Furthermore, to deal with any periodic signal of variable frequency, a fractional-order repetitive control scheme based on disturbance observer strategy is proposed. The stability of the overall closed-loop system is guaranteed via frequency domain analysis. Three controllers, that is, the proportional–derivative controller with zero-phase error tracking controller scheme and the conventional disturbance observer, the integral backstepping controller, and the compound discrete general composite nonlinear feedback controller with fractional-order repetitive control scheme based on disturbance observer are compared. To demonstrate the dynamic tracking performance of the proposed control strategy, comparative experiments are conducted.
Keywords
Introduction
Dynamic tracking has become one of the most significant performances of servo controlling systems. This indispensable servo technique is used in a wide variety of high-performance mechatronic systems, including a typical hard disk drive, 1 a nanopositioning stage, 2 an XY-table positioning mechanism, 3 and a hydraulic servo system. 4 Over the past decades, the existing researches are focused on the design of feedforward controller to improve the dynamic performance of servo systems. 5 Instead of altering the stability, a feedforward controller provides the overall system with specific frequency tracking characteristics. In addition, a closed-loop controller is essential to guarantee the stability of the system. As an effective feedforward design approach, zero-phase error tracking controller (ZPETC) counteracts the closed-loop poles and the cancellable zeros of the control plant to turn the gain into the unit circle at low frequencies, and at the same time, eliminates phase error induced by non-cancellable zeros at all frequencies. 6 To ensure the anticipated performance of ZPETC, it is indispensable to acquire the precise model of the plant system. However, servo mechanisms may have a large extent of nonlinear uncertainties such as nonlinear friction and the large change of payload. Therefore, the tracking performance of ZPETC may be deteriorated by parameter perturbations and external disturbances.
Improving transient performance plays a crucial role in tracking dynamic external signals. Compared to conventional approaches, an intelligent nonlinear control technique, the so-called composite nonlinear feedback (CNF) control, is capable of performing track following with much better result. The CNF control, which is rooted in the article of Lin et al., 7 consists of a linear feedback law and a nonlinear feedback law. The linear feedback part is designed to yield a closed-loop system with a small damping ratio for a quick response. The nonlinear feedback law, on the other hand, is supposed to increase the damping ratio of the closed-loop system as the system output approaches the target reference. This transformation of system can reduce the overshoot caused by the linear part. Chen et al. 8 developed the CNF control technique for more general linear systems with input saturation. In the most previous forms of the CNF control technique, the target reference has always been assumed to be a step signal. In particular, Cheng et al. 9 adopted a reference generator which produces more general signals to supplement the CNF control technique. Thus, it can yield a good performance for tracking general non-step references. Moreover, in the current digital control systems, a controller designed in continuous-time domain eventually has to be discretized for implementation. It seems more efficient to design controllers directly in the discrete-time domain whenever possible. However, the existing studies hardly focus on tracking more general reference signals via CNF control strategy for a class of discrete-time systems.
Friction, as the main source of torque disturbance, occurs unavoidably in direct-driving servo mechanical systems. Thus, there is a wide recognition that in order to achieve better tracking performance, it is essential to design compensatory components which can inhibit the effect of frictional disturbance. The conventional disturbance observer (DOB) becomes one of most effective ways to restrain the internal and external disturbance,10,11 which will enhance the rigidity of servo mechanism eventually. However, due to the low-pass Q-Filter, the compensations of DOB usually result in magnitude distortions and phase lags when confronted with periodic inputs. Therefore, with regard to the dynamic tracking, the conventional DOB fails to compensate for specific disturbances.
However, providing that these disturbances, especially friction, have periodic and repetitive characteristics, then the compensation schemes become much easier to design. Actually, all state variables as well as disturbances in direct current (DC) servo mechanisms have the same repetitive period as that of repetitive external command, and then, the stated assumption becomes reasonable. As a consequence, repetitive control (RC) is very effective to attenuate these periodic disturbances. Distinguished by its high performance as well as the simple design and implementation criteria, RC improves the periodic tracking performance12,13 by implementing
Unfortunately, the period of the disturbance or reference (
In this article, by borrowing ideas from general CNF and RC based on DOB structure and integrating them with some assumptions, a new compound controller is proposed. It can adapt to arbitrary frequency signals for a high-accuracy flight simulator system driven by DC motors. To verify the high performance of the proposed controller, extensive comparative experimental results have been obtained from the motion control of a DC motor. The distinctive characteristics of this work are as follows:
Unlike the general CNF designed in continuous-time domain, 9 the general CNF based on discrete-time domain which is more practical is proposed to yield good performance in tracking dynamic signal. And the explicit design procedure is given in the following.
The RDOB strategy was first proposed by Chen and Tomizuka. 14 It differs from the control scheme, 18 which just combines the conventional DOB and RC controller separately (both the phase lag problem of DOB and undesired gain amplifications of RC may occur in reality). The novelty of RDOB is the flexible structure of RC presented in DOB configuration. However, in the existing literatures, the order N of RDOB has to be an integer, which limits the implementation of RDOB in practical engineering. In this article, the proposed fractional RDOB can effectively overcome this adverse limitation.
This article is organized as follows. Problem formulation and dynamic models are presented in section “Introduction.” Section “Problem formulation” gives the discrete general composite nonlinear feedback (DGCNF) controller design procedure and the new structure of FRDOB, and the stability analysis is also presented in this section. Experimental setup and comparative results are presented in section “Compound control scheme.” Section “Conclusion” contains the conclusions.
Problem formulation
A flight simulator, as being a kind of servo mechanism with high accuracy in position tracking, has been widely used in modern engineering system. As shown in Figure 1, a complex flight motion simulator is currently composed of an orthogonal outer axis frame, a middle-axis frame which is horizontal to the outer axis, and an inner-axis frame supported by the middle-axis frame. The inner axis is driven by a DC motor that is fixed onto the center of the middle frame. In practice, in order to achieve dynamic tracking performance, both the outer- and middle-axis frames have to be designed largely enough to be consistent with more powerful motors. Whereas, the inner axis frames can not be manufactured large enough for the reason that the middle-axis frames fail to endure overweight load. In consequence, the inner-axis frame, with the less powerful motor but the greater force of friction, has trouble behaving well in frequency tracking. Considerations should be given priority to the inner-axis frame.

Architecture of a three-axis flight simulator.
The architecture of the inner-axis frame is described by Figure 2. It is a current-controlled permanent-magnet DC motor with an analog amplified driver.
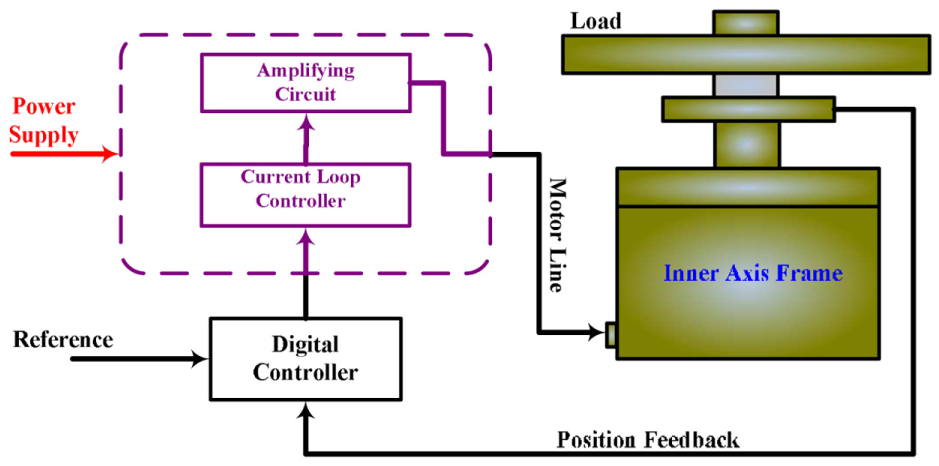
Architecture of the inner-axis frame.
The equation of dynamic plant model in the inner-axis frame is described as 19

where

where
At the same time, being ignored of unstructured uncertainties, the nominal model of the plant can be expressed as follows

where J and Bp could be obtained approximately by open-loop system identification. 20 But as for d, the precise modeling of disturbance is challenging and difficult. 21 To eliminate the effects of disturbance and achieve highly precise motion control, significant efforts have been devoted to compensation strategy.
Given the approximate second-order plant, our aim is to synthesize a control input u to make the state vector x track the dynamic signal as precisely as possible in spite of parameter uncertainties or unstructured nonlinear uncertainties.
Compound control scheme
Fundamental feedback controller design
In order to achieve the fundamental servo performance and robustness, a feedback controller has to be designed. Instead of using conventional proportional–integral–derivative (PID) or Sliding Mode Control scheme, a unique variable structure control strategy DGCNF is adopted to yield a good performance for the second-order servo model mentioned above. By altering the damping ratio of the overall closed-loop system corresponding to the error, the proposed controller can perform well in quick response and succeed to reduce overshoot as well. It is a necessary characteristic for tracking dynamic signal. The proposed DGCNF is consisted of an auxiliary reference generator and a discrete CNF control scheme.
Specifically, a typical discrete second-order servo model is characterized by

where

with
(A, B) is stabilizable.
(A, B, C) is invertible and has no invariant zeros at
The reference generator, based on equation (4), is constructed to generate any sinusoidal signal such as

where
Next, we design a linear control law for the auxiliary system as follows

where
The auxiliary system (6) and the linear control law (7) are combined to form the final reference generator as follows

The reference generator (8) can generate an arbitrary type of sine signal
Then, let

This equation will be used in the design of the DGCNF control law. The following design procedure will be carried out in three steps similar to Chen et al. 8
Step 1: Design a linear feedback law

In this step, F is designed by two main principles. First, the stability of the overall system must be guaranteed, and then, the closed-loop poles should be placed to have a dominating pair with a small damping ratio. It will in turn yield a fast rise time in the closed-loop system response. This procedure corresponds with the conventional proportional–derivative (PD) control design.
Step 2: Design a nonlinear feedback law
Furthermore, as

The nonlinear feedback portion of the DGCNF control law

where
Step 3: The linear feedback control law and nonlinear feedback portion derived in the previous steps are now combined to form a DGCNF control law

The DGCNF control law comprising the reference generator (8) and the modified enhanced CNF control law (13) will drive system output y to track arbitrary reference r asymptotically. The proof will be discussed in the end of this section.
Modified repetitive controller design
As mentioned above, the design of DGCNF assumes that there is no disturbance in the model. When the given system does have disturbances, the system output under DGCNF control generally cannot track the sinusoidal reference precisely. In the case of practical servo mechanism, there are always some disturbances, such as friction and bias torques. In this section, a newly developed repetitive strategy RDOB is adopted to compensate or counteract disturbance.
As shown in Figure 3, the ingenious feature of RDOB is that the novel repetitive configuration based on DOB aims at maintaining

Block diagram of the RDOB scheme.

Block diagram of the DOB scheme.
An infinite impulse response (IIR)

where
To explore the proposed scheme more thoroughly, the block diagram can be transformed into Figure 5.
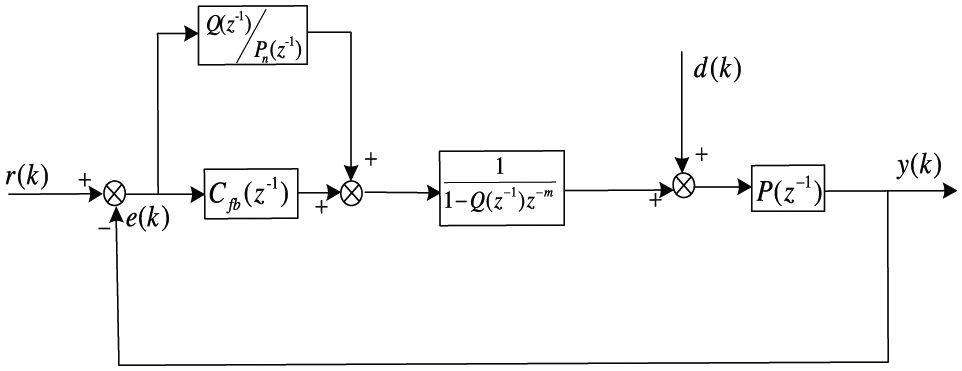
Equivalent structure of Figure 3.
In forward channel of the diagram, there exists

Therefore, under the specific frequency,

where

Moreover, Lagrange interpolation is one of the easiest ways to design a fractional-order delay filter. The coefficient of equation (17) for the assumed filter only consumes a small number of additions and multiplications. Therefore, fractional-order delay filter based on Lagrange interpolation can not only be easily implemented in real-time applications but also offer high approximation accuracy in most cases.
In this work, with the consideration of computational complexity and approximate precision, n is equaled to 3. Then, equation (18) is obtained as follows

Moreover, from equations (14) and (18), the final form of

Combining equations (15) and (18) yields

To investigate the performance of

Magnitude responses of

Magnitude responses of
As shown above,
Furthermore, as the FRDOB produces high gain at specific frequencies, it may amplify the mismatch between the actual

The practically implemented

where
Stability and robust stability
To prove the convergence of DGCNF, we can combine the previous demonstration.9,24 The process of proof is essentially the same as conventional CNF. The DGCNF controller output (13) will drive system-controlled output
The expected DGCNF controller output can be express as

Furthermore, equation (23) can be rewritten as

where
On observation, we can regard the DGCNF control law (24) as a compound algorithm composed of a novel variable PD strategy and a feedforward controller that can improve tracking performance to some extent. Performing the block diagram transformations in Figure 3, we obtain an ultimate form of the overall system in Figure 8.

Block diagram of the proposed scheme.
From Figure 8, the closed-loop transfer function from

where the feedforward controller does not affect the stability. And the characteristic polynomial of the closed-loop transfer function can be obtained as

Basically, the overall closed-loop stability can be assured by checking whether the roots of the characteristics equation (26) lie within the unit circle. However, the approach of frequency domain analysis may be more efficient.
Equation (26) can be rewritten as

In equation (27),

Robust stability can also be analyzed by applying Small Gain Theorem when there exists perturbation
By computing the sensitivity function
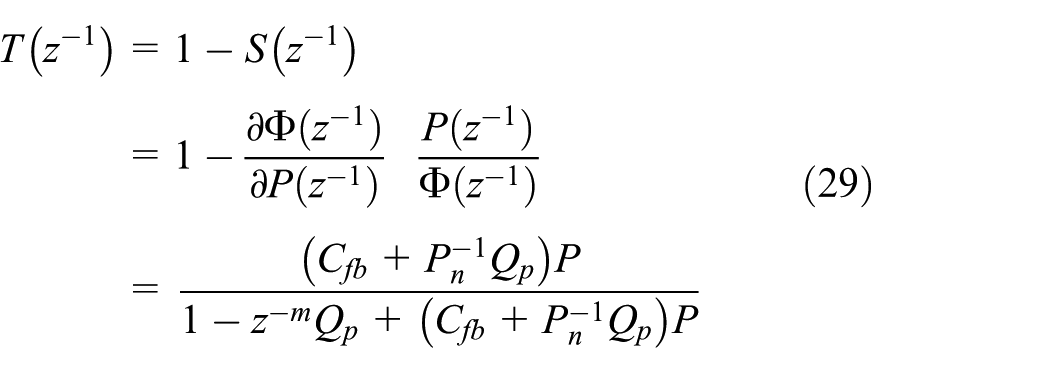
The robust stability condition can be achieved as the following condition is satisfied

A factual example of stability and robust stability analysis will be provided in Figures 11 and 12.
Experimental validation
Experimental setup
To demonstrate the applicability of the proposed method, an actual flight simulator system is employed as the test platform, which is shown in Figure 9. It consists of an inner-axis rotary actuator, a digital control system, and a DC pulse-width-modulated (PWM) amplifier.

Test platform.
The rotary sensor of the device uses the encoder of Heidenhain ECN125 whose accuracy is about
System identification
Using the method of frequency domain identification, the nominal model can be identified as

The distinctions of frequency characteristics between the actual plant and the nominal model are shown in Figure 10.
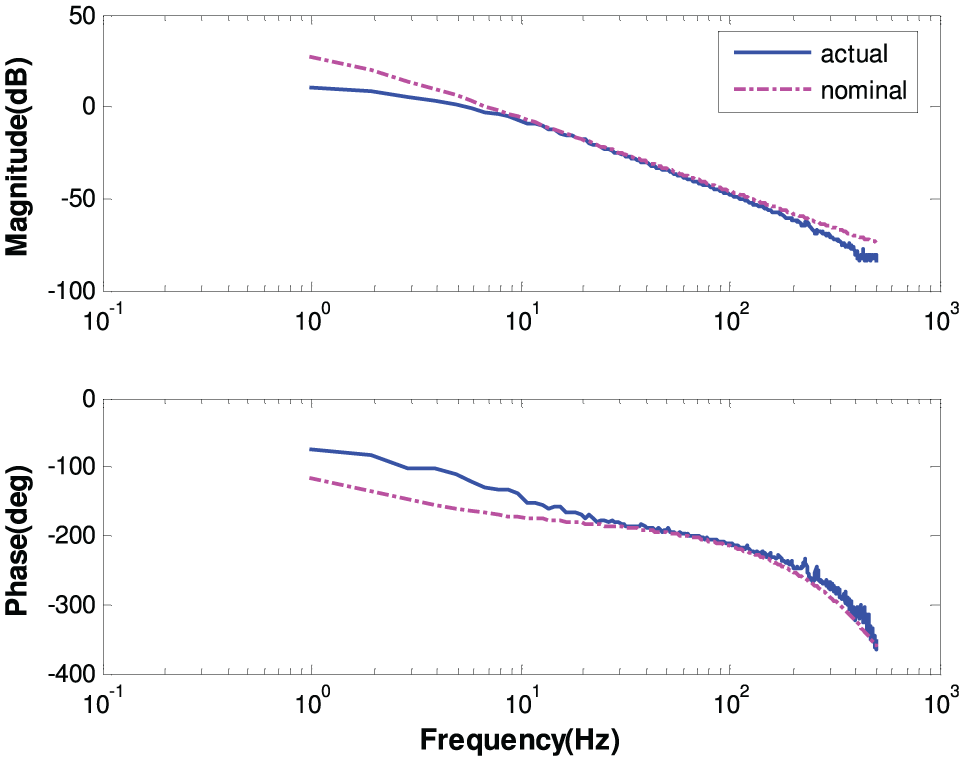
Frequency characteristics between the actual plant and the nominal model.

(a) Stability and (b) robust stability when the external signal at 5 Hz.

(a) Stability and (b) robust stability when the external signal at 11 Hz.
From Figure 10, there are extreme mismatches in amplitude–frequency and phase–frequency characteristics at both low frequency and high frequency. These uncertainties will definitely cause difficulties in achieving desired control performance.
Design of controllers
The following three controllers are compared:
PD + DOB + ZPETC: This compound control strategy is commonly used in servo system. It consists of three components, a PD feedback controller, a DOB as the compensation of friction, and a ZPETC as the feedforward controller. The details of this control structure can be found.
26
At the end, the parameters are set as
Integral backstepping: As a nonlinear controller, backstepping control with integral function can improve the system tracking response and bandwidth in some degree. The design procedure of this control scheme can be found,
27
and the parameters are set as
FRDOB + DGCNF: The overall structure of the proposed algorithm is depicted in Figure 8. And according to Figure 8, the procedure of the algorithm is established as follows:

where
Experimental results
The three controllers are first tested for two specified sinusoidal trajectories in 5 and 11 Hz, that is, the tracking command signals are employed as
The compared tracking errors of the three controllers are shown in Figure 13. It shows that the proposed FRDOB + DGCNF controller performs extremely better than PD + DOB + ZPETC controller and integral backstepping controller in terms of tracking accuracy at both 5 and 11 Hz: the maximum tracking errors decrease to 0.000568 with the help of FRDOB + DGCNF. The precision raises two orders of magnitude in the proposed schemes.
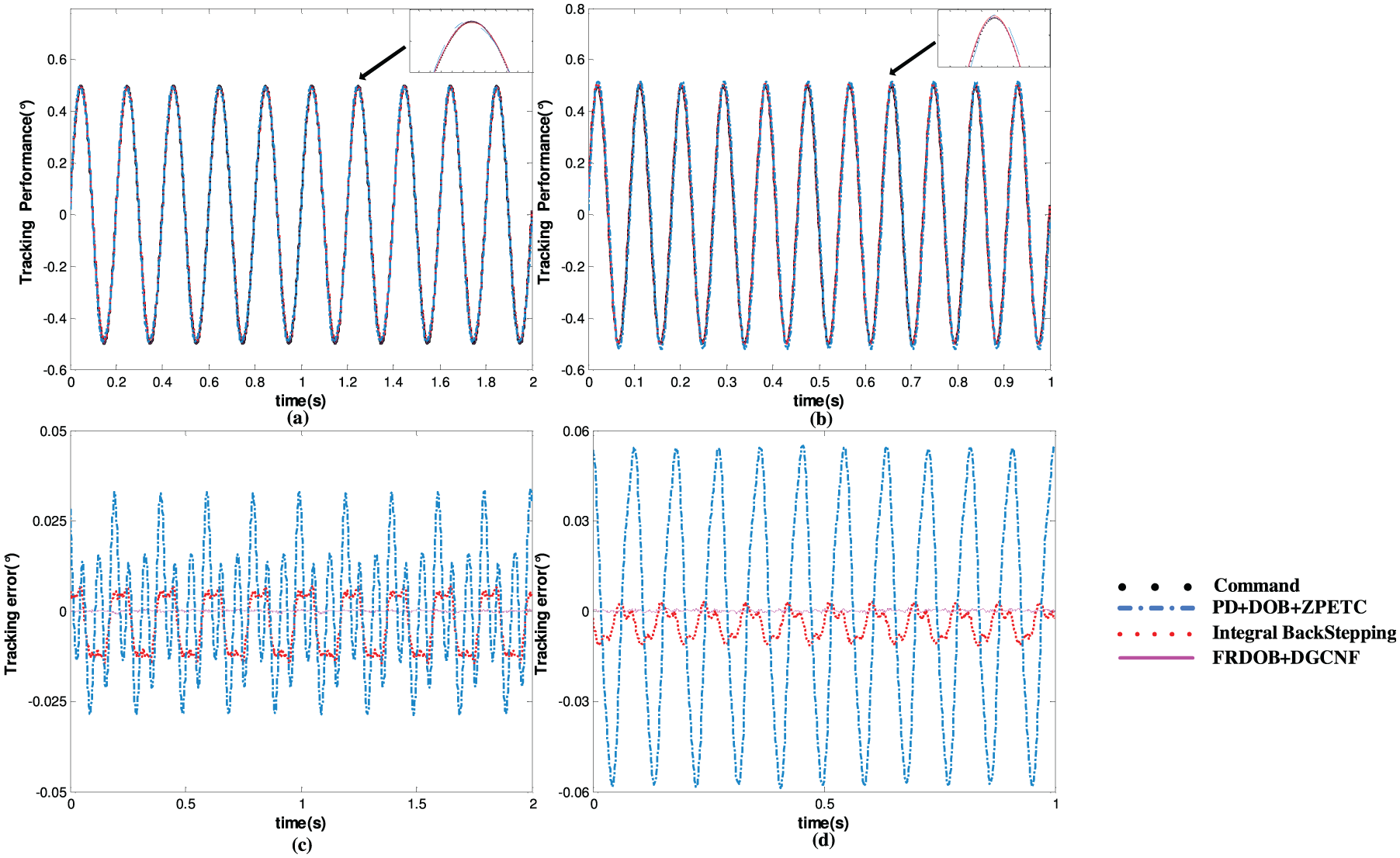
Control performance of the three control strategies: (a) 5 Hz and (b) 11 Hz.
To further show the robustness of the proposed strategy contrast to the previous methods, an unbalanced payload is installed on the inner axis. The condition is shown in Figure 14; the payload is about 6.6 pounds.
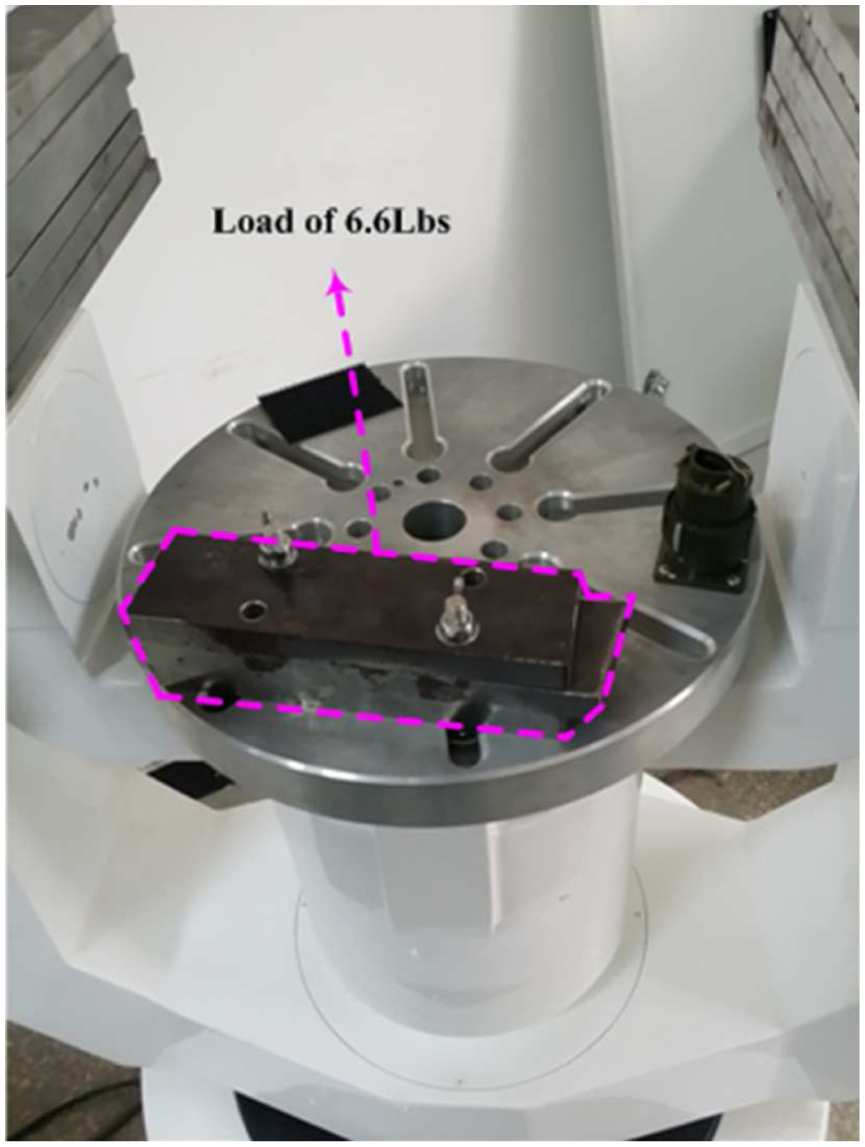
Inner axis is installed with an unbalanced payload.
The comparative performance is illustrated in Figure 15. In the case of extra payload, the tracking error of the proposed FRDOB + DGCNF controller can be limited within a small level. It is also found in Figure 16(e) and (f), regardless of the additional payload, the proposed FRDOB + DGCNF scheme remains almost unchanged in tracking dynamic signal at 5 and 11 Hz. Particularly, with the increase in the signal frequency, the errors of those two control schemes increase obviously.
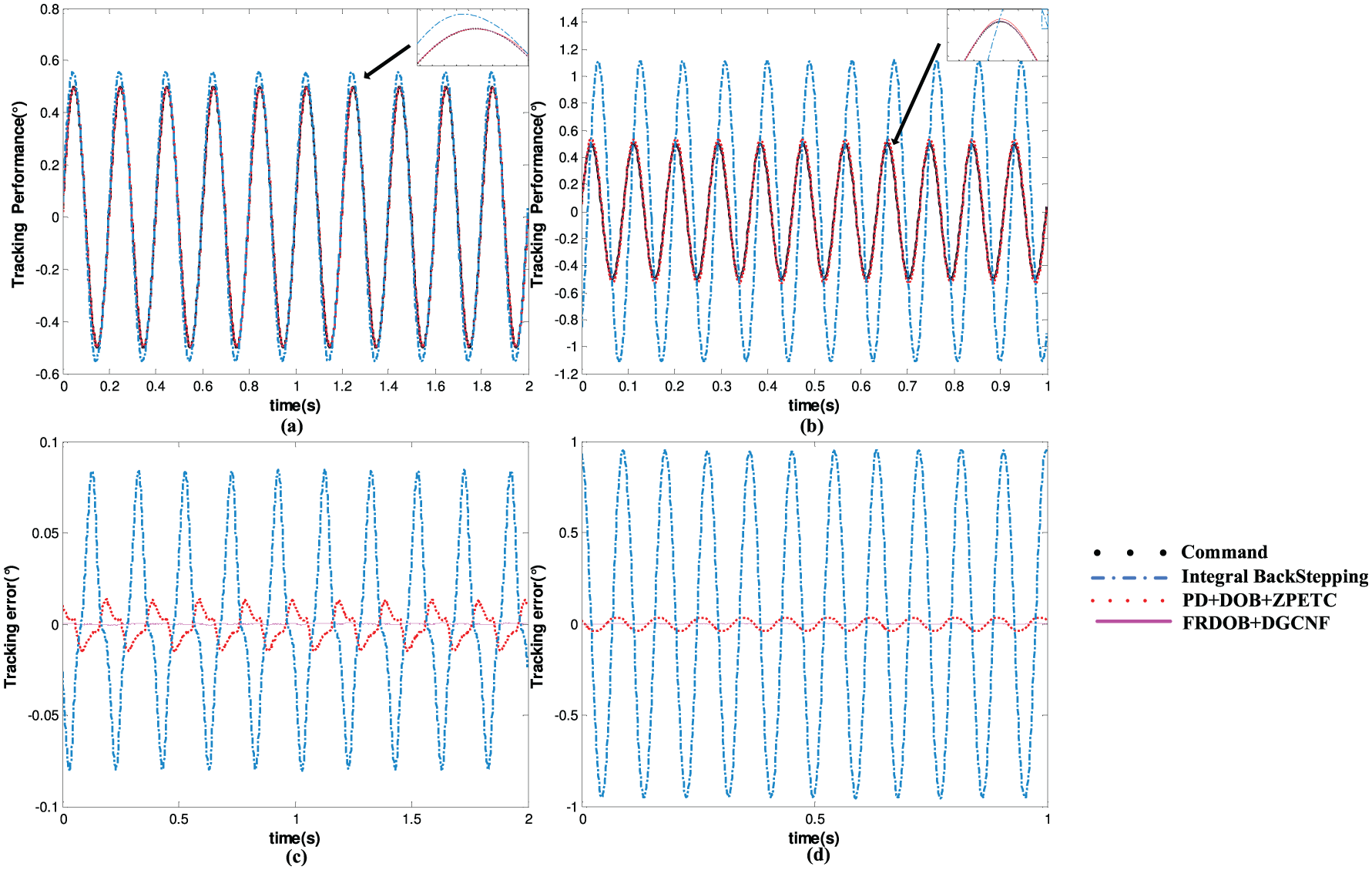
Control performance of the three control strategies with payload: (a) 5 Hz and (b) 11 Hz.

Comparison of tracking error with and without the payload: (a), (c), and (e) 5 Hz and (b), (d), and (f) 11 Hz.
The strong robustness of the proposed scheme can be explained by two primary factors: first, DGCNF scheme is essentially a PID mode algorithm; therefore, it is unsusceptible to the uncertainties of the model. Concentrating on the input and output, it contributes to diminish error. Second, the filter
In addition, the tracking performance of the proposed control scheme is compared with the pre-existing RDOB 3 to demonstrate the effectiveness of the fractional filter. When the external signal is 11 Hz, the order of N in equation (14) is fractional (1000/11). The comparative performance is illustrated in Figure 17. Due to the inexact fractional order, the conventional RDOB fails to compensate the periodical error or disturbance in appropriate discrete-time point. However, by numerical approximation with fractional order, the proposed FRDOB can eliminate the mismatch to a great extent.
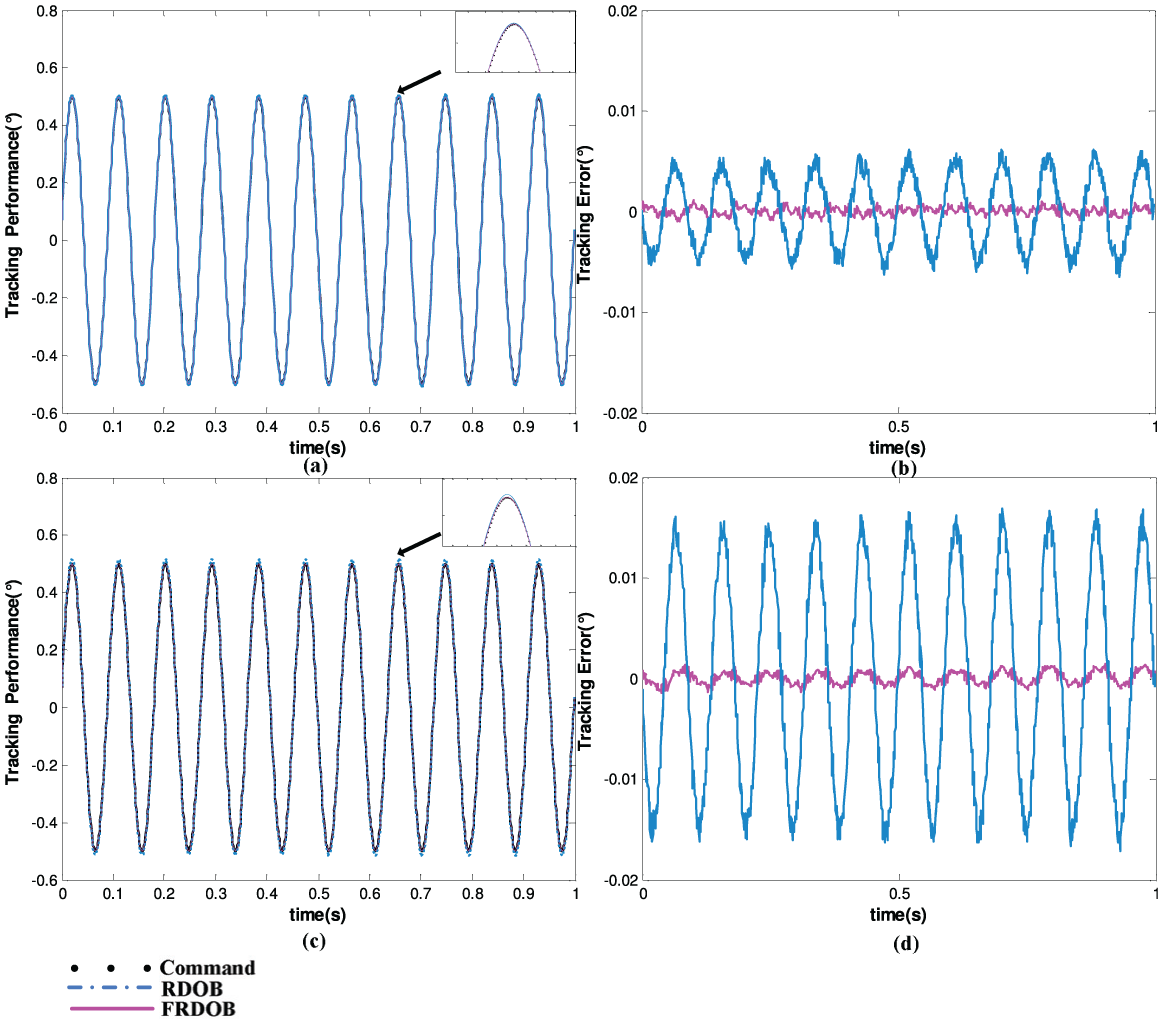
Comparison of tracking performance of FRDOB and RDOB: (a and b) with payload and (c and d) without payload.
Conclusion
In this article, a DGCNF combined with repetitive controller based on DOB form is proposed for dynamic tracking servo system. The developed controller has the property of improving transient performance without too much overshoot which mainly derives from CNF technique. The FRDOB, with the fractional delay filter, has an advanced improvement of rejecting any periodic disturbance or tracking arbitrary repetitive external signal. The stability as well as robustness of this controller is guaranteed via frequency domain analysis. The illustrative experiments demonstrate the effectiveness of the proposed controller. The performance limitations of traditional PD + DOB + ZPETC and integral backstepping in servo systems are experimentally investigated, while the proposed controller could overcome these limitations and improve the dynamic tracking performance effectively.
Footnotes
Academic Editor: Anand Thite
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by the grants of National Natural Science Foundation of China (No. 61563041) and Inner Mongolia Natural Science Foundation (No. 2015MS0603).