
Abstract
In this article, an adaptive particle swarm optimization wavelet neural network with double sliding modes controller is proposed to address the complex nonlinearities and uncertainties in the electric load simulator. The adaptive double sliding modes–particle swarm optimization wavelet neural network algorithm with the self-learning structures and parameters is designed as a torque tracking controller, in which a number of hidden nodes are added and pruned by the structure learning algorithm, and the parameters are online adjusted by the adaptive particle swarm optimization at the same time. Moreover, one conventional sliding mode is introduced to track the time-varying reference command, and the other complementary sliding mode is adopted to attenuate the effect of the approximation error. Furthermore, the relative parameters should comply with some estimation laws on the basis of the Lyapunov theory used to guarantee the system stability. Finally, the simulation experiments are carried out on the hardware-in-the-loop platform for the electric load simulator, the performance of the adaptive double sliding modes–particle swarm optimization wavelet neural network with structure learning is verified compared with some similar control methods. In addition, different amplitudes and frequencies of the reference commands are introduced to further evaluate the effectiveness and robustness of the proposed algorithms.
Keywords
Introduction
The load simulator is designed for the guns, aircrafts, and ships,1–3 which is also a key equipment in the hardware-in-the-loop simulation (HILS) for the test and simulation. Traditional researchers in load simulators always focus on the optimization of control parameters,4,5 and the control strategies show poor performance when the control objectives or working conditions are changed. Due to the complex nonlinearities and uncertainties, especially like backlash, friction, and coupling between the load motor and the torque motor, many intelligent algorithms are investigated for load simulators to improve the tracking performance and robustness.6–10 Although many of the mentioned works above are focused on the electro-hydraulic load simulators (EHLS) usually applied to the heavy loading, there are many similar characteristics between the EHLS and the electric load simulator (ELS). 1
Among different nonlinear control techniques, methods based on the neural network (NN) have been growing into a popular research topic in recent years.11–13 Considering the local search ability and low convergence rate, the wavelet neural network (WNN) with the merits of time domain and frequency domain search and approximation has been widely applied to the nonlinear control.14,15 However, the methods above can only represent models with limited accuracy, so there remains approximation errors between the practical system and the constructed model.1,7 In order to solve this problem, several stability analyses combined with the sliding mode control (SMC) are proposed to guarantee the system stability in the sense of Lyapunov theory.2,8,15,16 Although the SMC has great fast response and transient control performance against the disturbances, it suffers from large chattering phenomena. Therefore, many compensation methods have been proposed to eliminate the external disturbance effect.17–20 A saturated modification of traditional projection-based adaptation laws is proposed to eliminate the chattering phenomena, which also guarantees the system stability in the sense of the Lyapunov theory. 20 However, many parameters cannot be exactly obtained, which are always changing in the practical working conditions, such as the friction and backlash. Since the parameters of real nonlinear systems are time variable, the structure and parameter selection has played great effects on the control performance.15,16,21,22 In view of parameter uncertainties, chattering phenomena, and computation complexities, the structure of the WNN should be adaptive to guarantee the computation efficiency.15,16 The structure learning (SL) algorithm can online adjust the hidden nodes to reduce the computation loading and improve the control performance. Meanwhile, the particle swarm optimization (PSO) is used to adjust the parameters of the WNN, which speeds up the convergence rate and decreases the oscillations of the SMC.23,24
This article puts forward an adaptive particle swarm optimization wavelet neural network (PSOWNN) with double sliding modes (2S) controller, which can also vary its hidden nodes of the WNN dynamically to keep the prescribed approximation accuracy with a simple computation. Moreover, the WNN is designed to online estimate the system dynamics, the parameters of which are adjusted by the adaptive PSO. Furthermore, to speed up the convergence speed and guarantee the stability, an analytical method with 2S on the basis of Lyapunov theory is proposed to determine the dynamical learning rates and estimation laws. Finally, the simulation experiments are carried out to evaluate the performance and robustness of the proposed adaptive double sliding modes–particle swarm optimization wavelet neural network (2S-PSOWNN) with SL controller.
Problem statement
In order to evaluate the static and dynamic performance of the gun control system (GCS) in advance, the ELS is designed to simulate the time-varying loading, especially the inertia loading and external disturbances, which is mainly composed of a host control computer, a signal conditioning center, a torque motor, a motor drive, a torque sensor, a resolver, an angular velocity sensor, an angular acceleration sensor, inertia disks and a gear reducer, and so on, as shown in Figure 1. The host control computer with the proposed algorithm to achieve torque tracking control of the ELS mainly analyzes and calculates the feedback torque of the torque sensor, the compensation torque of inertia disks, and the actual torque required. The signal conditioning center is mainly used for processing signals from the sensors and the configuration settings needed for the hardware switches. According to the output of the host control computer, the output of drive provides the appropriate current to drive the torque motor. The torque sensor is used to collect the output of the torque motor, which is fed back to the host control computer to form the closed-loop control for the loading torque. The function of the resolver is gathering the angle position of the gear reducer, which can be used to calculate the real-time command torque for the torque motor. The function of the angular velocity sensor is gathering the angular velocity of the gear reducer to provide more actual values for the identification methods and the control strategies. The angular acceleration sensor collects the angular acceleration at the end of the gear reducer to compute the inertia moment produced by the inertia disks. The number of inertia disks depends on the actual demand of the GCS, which provides various rotational inertia values to simulate the inertia torque. The position of the load motor is a strong disturbance for the torque motor. At the same time, the motion of the torque motor is also a strong disturbance for the load motor, so the ELS exists inherent coupling and interacting. In addition, the friction and backlash also play a negative impact on the ELS, which show strong nonlinearities and uncertainties at the low speed and shaft direction variation. Common control strategies cannot guarantee the system torque tracking with high control performance, and the exact model also cannot be established. 6 Therefore, considering the complexity of the ELS system that can be simply modeled by the following equation

where

Structure of the electrical load simulator.
Design of adaptive 2S-PSOWNN with SL
Although the ideal controller can asymptomatically stabilize the system, some time-varying variables cannot be obtained exactly, like the external disturbance

where

Structure of the adaptive 2S-PSOWNN with SL controller.
WNN
The structure of the WNN controller is shown in Figure 3, which consists of an input layer, a hidden layer, and an output layer. The signal propagation and activation function in each layer are introduced as follows:
1. Input layer. No function is performed in this layer. Each node in this layer only transmits input variables e and
2. Hidden layer. In this layer, each activation function can be represented as follows 25

where a and b are the dilation and translation parameters, respectively. The Mexican hat mother wavelet function is defined as follows

where

where
3. Output layer. According to a sum method, the output is obtained as follows

where

Structure of the WNN.
The final output vector of the WNN is defined as


where


where
Adaptive PSO
In order to improve the computation efficiency, the adaptive PSO algorithm is designed to adjust the parameters of the WNN. The position and speed of particles are always updated by tracking the individual and global extremums in the solution space, and initial values of the particle position and speed are usually given in the start stage. The parameters of the WNN needed to be adjusted are the optimized objects of the adaptive PSO. A relative equation is defined as follows
where

where
1. Compute the Euclidean distance between every particle and other particles

2. Define the evolutionary factor when the distance of the global optimum particle is named as

The states of particle swarms are effectively evaluated with the constructed evolutionary factors, and the learning factors are adjusted in the range


If

SL algorithm
Determining the number of hidden nodes is an important issue because of the trade-off between the computation loading and learning performance. In order to attack this problem, a simple SL algorithm is introduced. The activation intensity and output errors are used as the judgment rules. If the maximum output of the activation function is less than specific threshold, then a number of hidden nodes need to be added. The relative norm is defined as


where


where
To avoid the number of hidden nodes growing unboundedly, an algorithm for pruning the hidden nodes is necessary to prevent the heavy computation loading, and a significant index based on the activation function is determined for the importance of the

where
Stability analysis
The control objective is to find a control method so that the state trajectory

where

If the system parameters in equation (1) are known, there exists an ideal feedback controller as follows14,30

Considering the existing errors caused by the external disturbances, the other complementary sliding mode is defined as follows 15

Therefore, the sum

Main theorem
Considering the ELS system represented by equation (1) and the WNN designed as equations (9) and (10), where






Proof
The Lyapunov function is given by

where

where

Substituting the parameter estimation laws (equations (31)–(34)) into equation (37) yields

Since
Simulation
In order to demonstrate the applicability and effectiveness of the adaptive 2S-PSOWNN with SL controller, the reference commands with different algorithms are applied to the simulation platform for the ELS, as shown in Figure 1, which are evaluated by the root mean square error (RMSE) of the output torque. The following simulations are carried out in an Intel Core i5 CPU with 3.2 GHz rate, 4 GB RAM and 64-bit operating system. The parameters of the actual gun control system are as follows: the rotary inertia of the turret is 7000 kg m2, the total friction torque
Parameters of the torque motor.

Convergence analysis
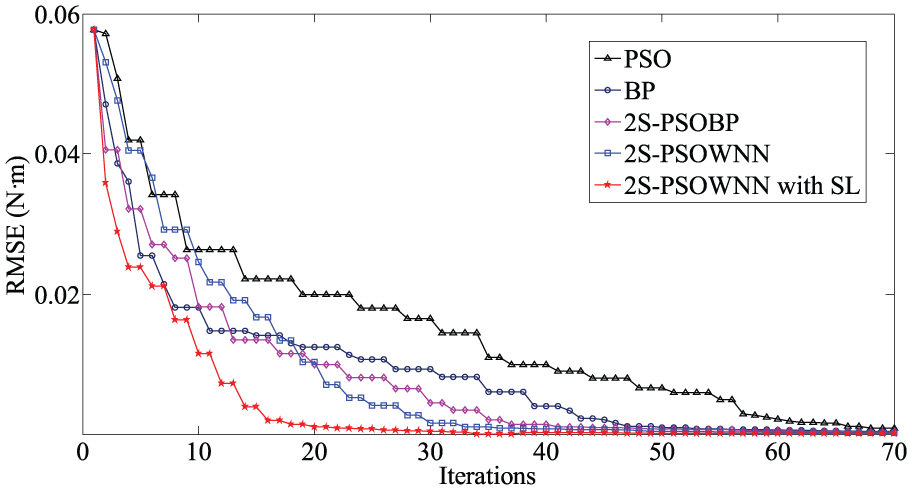
Taking the real-time characteristics of the ELS system into consideration, the high computation efficiency and the great convergence rate must be guaranteed. Figure 4 depicts the RMSE profiles for all the five different methods (PSO, backpropagation (BP), double sliding modes–particle swarm optimization with backpropagation (2S-PSOBP), 2S-PSOWNN, and 2S-PSOWNN with SL). 33 It is clear that the adaptive 2S-PSOWNN with SL meets the control precision about 22 iterations quickly when the required RMSE is set 0.001 N m. The worst convergence iterations are even 68, which is relatively not suitable for the ELS system.
Number of iterations.
Step response
The step response with the external disturbance of the adaptive 2S-PSOWNN and 2S-PSOWNN with SL is evaluated in Figure 5, which further shows the rapidity and stability of the proposed algorithms in the ELS. From the simulation results, it is clear that the adaptive PSOWNN with SL controller meets the requirements in 63 ms when the amplitude of the reference command is 10 N m. However, the adaptive 2S-PSOWNN controller achieves the goal which is 25 ms later than the former above. At the time of 145 ms, an external disturbance is exerted to the ELS system, and the latter performs worser than the former, which proves that the addition of SL algorithm improves the robustness of the control system to some extent.
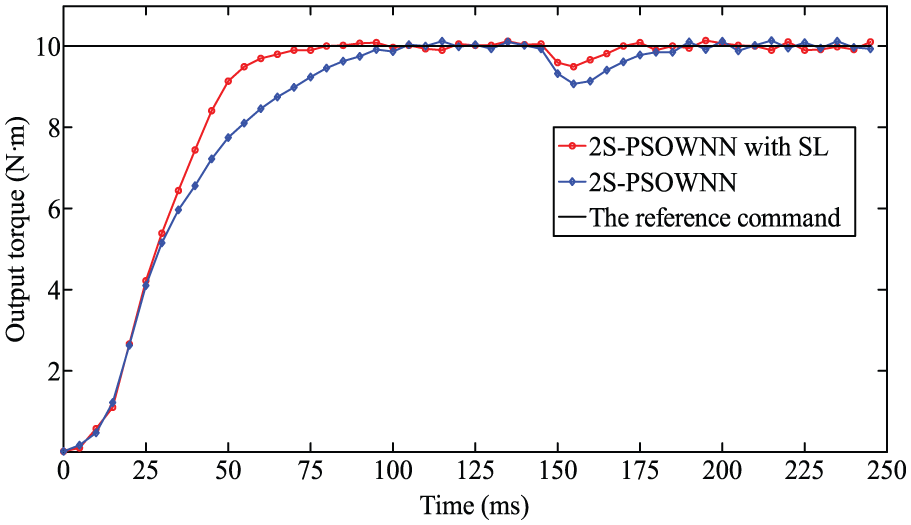
Comparison of step response with the external disturbance.
Sinusoidal tracking
In order to simulate the complexities existing in the practical GCS, the sinusoidal motions of the torque motor are taken as the reference command when the load motor is working in the different working styles. First, the output torque of the adaptive 2S-PSOWNN and 2S-PSOWNN with SL controller is shown in Figure 6 with the reference command

Sinusoidal tracking at the static loading.
Then, considering the time-varying position of the load motor and further analyzing the stability and precision of the desired outputs with different frequencies and amplitudes, the reference commands of the torque motor are selected as

Sinusoidal motion of the load motor.

Sinusoidal tracking with
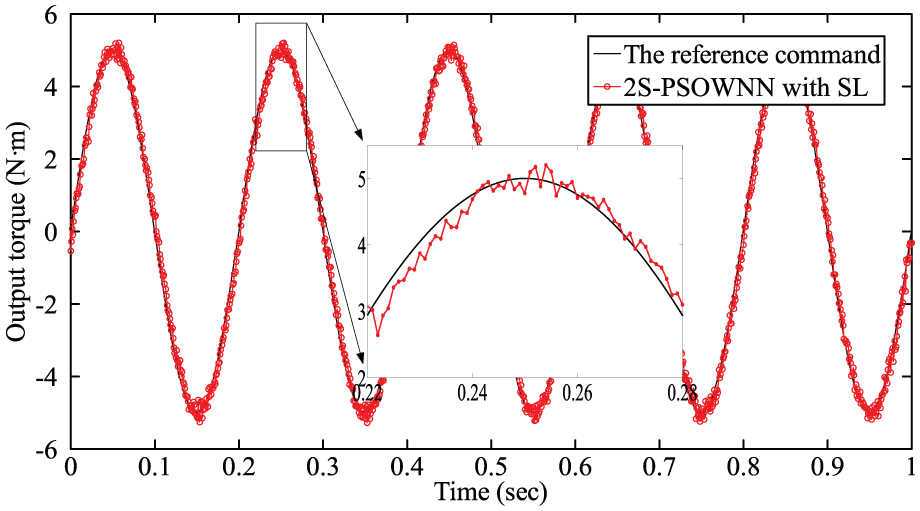
Sinusoidal tracking with

Sinusoidal tracking with
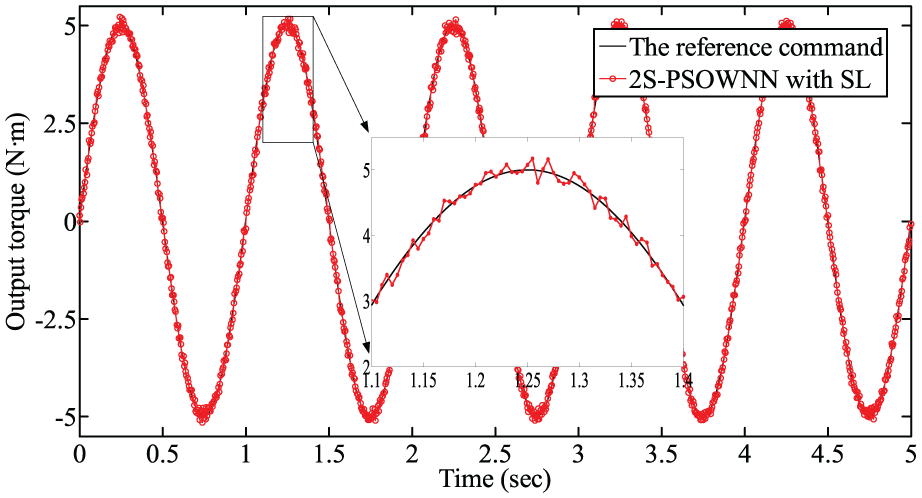
Sinusoidal tracking with

Sinusoidal tracking with
Dynamic experiment results of the sinusoidal tracking.

From Table 2, the experiment results indicate that the amplitudes and frequencies of the reference commands play great effects on the performance of the ELS system, but the proposed algorithm wholly meets the control requirements. In combination with the time-varying position of the load motor, the controller shows better characteristics when the load motor is working in the static state. When the load motor is set in the sinusoidal motion, the bigger amplitude and the lower frequency of the reference commands are superior to the smaller amplitude and the higher frequency. However, what we need to remind is that the control effectiveness is relatively poorer when the direction of the torque motor is changed, which may be influenced by the friction and backlash and needs to be further studied in the future.
Conclusion
In this article, an adaptive 2S-PSOWNN with SL algorithm is proposed and applied to the ELS system. The parameters of the WNN are online tuned by the adaptive PSO, and the SL algorithm is adopted to add and prune the number of hidden nodes to improve the computation efficiency. 2S not only enhance the approximation accuracy but also guarantee the stability in the sense of Lyapunov theory. The simulation results show that the proposed controller has superior performance and great robustness in many ways.
Footnotes
Acknowledgements
The authors would like to express their gratitude to all anonymous reviewers for their valuable comments.
Academic Editor: Yaguo Lei
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science Foundation of China under grant no. 51305205.