
Abstract
Due to the complexities existing in the electric load simulator, this article develops a high-performance nonlinear adaptive controller to improve the torque tracking performance of the electric load simulator, which mainly consists of an adaptive fuzzy self-recurrent wavelet neural network controller with variable structure (VSFSWC) and a complementary controller. The VSFSWC is clearly and easily used for real-time systems and greatly improves the convergence rate and control precision. The complementary controller is designed to eliminate the effect of the approximation error between the proposed neural network controller and the ideal feedback controller without chattering phenomena. Moreover, adaptive learning laws are derived to guarantee the system stability in the sense of the Lyapunov theory. Finally, the hardware-in-the-loop simulations are carried out to verify the feasibility and effectiveness of the proposed algorithms in different working styles.
Keywords
Introduction
The electric load simulator (ELS) is a crucial equipment in the hardware-in-the-loop (HIL) experiments, widely used in the gun, aerospace, and marine engineering,1–3 which is designed to generate the torque to simulate the dynamic loads acting on the actuator system and greatly accelerates the development of the research and product of the actuator system. The ELS of steering engines is commonly studied, which is different from the ELS for the gun control. The former is designed to simulate resisting torque, such as the air and water resistance, the latter is used to simulate the resisting and inertia torque. Apart from the same resisting torque, the inertia torque is also time variable, which can be effectively simulated comparatively, because the variations of the barrel angle and the number of the shells can be computed. In a word, the nonlinearities and uncertainties are playing great negative effects on the performance of the ELS, like the coupling of the torque motor and the load motor, the friction and backlash.4,5 Therefore, how to improve the ELS torque tracking performance has become a research hotspot recently. The ordinary methods adopt the feed-forward compensation using the actuator’s position and velocity signals,6,7 or the dual-loop scheme, 8 but the constructed model cannot wholly describe the friction and backlash nonlinearities, especially the approximation precision shows worse in the practical working conditions, so intelligent controllers with nonlinear characteristics and high precisions have been proposed to substitute the mechanism model.
The feed-forward neural networks (NN) with amazing learning ability, parallel computation, and remarkable generalization ability are widely applied to approximate the nonlinear and uncertain system, but they also have the drawbacks of the local minimum and low convergence rate.9,10 In order to solve these problems, the activation functions and the learning structures of the NN must be selected appropriately, which keep the model with the high computation efficiency and short training time. The wavelet functions with the advantages of time–frequency localization are incorporated into the NN, and the constructed wavelet neural networks (WNN) are widely applied to the engineering research area as the function approximation and signal processing.11,12 Considering the sudden changes and the external disturbance of the ELS, the self-recurrent WNN (SW) with storing the previous data is adopted to maintain the system stability.13,14 Meantime, considering the Takagi–Sugeno–Kang (TSK) fuzzy model with SW has generated a new network named fuzzy SW (FSW), which does well in enhancing the function approximation accuracy and generalization ability. 15 However, it is hard to determine the learning structure of the FSW because of the trade-off between the learning performance and the number of neurons. If the number of neurons chosen is too large, the computation loading may be too heavy for the practical applications although the learning performance is very good. To avoid this problem, many structure learning algorithms are proposed for the adaption of the NN,16,17 and the number of neurons can be adjusted dynamically by the significant index or rules. In practical control applications, it is impatient duty to have a systematic method of ensuring the stability of the overall system. Recently, many NN methods are introduced based on the Lyapunov stability theory,16–19 but what we need to resolve and focus on is the determination of the assumptions and adaptive learning laws. With the above-mentioned motivations, the radial basis function (RBF) NN with a self-recurrent and variable structure (VS) not only guarantees the stability of the control system, 19 but also does not need the constrained conditions and knowledge of the controlled system.20,21 In order to further decrease the approximation error, many compensation methods are proposed aiming at eliminating the external disturbances, which reduce the approximation error and improve the control precision.22,23
In this article, the proposed VSFSWC and complementary controller (CC) is a novel control structure, which comprises the merits of the fuzzy, self-recurrent, VS, WNN, and compensation method for the ELS system. The VSFSWC used as a main controller is online estimating the dynamic system, and the CC dispels the effect of the approximation error existing in the ELS system. Furthermore, the VS learning algorithm effectively decreases the computation loading, and the adaptive learning laws based on the Lyapunov theory are developed to tune the parameters of the WNN. Not only the fast convergence of the torque tracking error can be achieved but also the system stability can be guaranteed. Finally, the proposed control algorithms are comparatively applied to the HIL simulation system for the ELS, and the experimental results show that the proposed VSFSWC and CC can achieve a favorable control performance.
Problem statement and ideal backstepping controller design
Problem statement
Consider the characteristics of the ELS system which are described as the nth order nonlinear equation in the following24,25

where
Ideal backstepping controller design
The control objective is to find a control law so that the state
Step 1. The tracking error is defined as follows

Then, a stabilization function is as follows

where
Step 2. The second control input


where

Step


where
Step n. An error


where

Step

where

Step

Then the derivative of

Since

Because

In addition, since
Adaptive complementary fuzzy self-recurrent WNN controller design
Self-recurrent WNN
The structure of the self-recurrent WNN controller (SWC) is shown in Figure 1, which is comprised of an input layer, wavelet layer, and output layer. The input of the input layer is
Layer 1—Input layer: No function is performed in this layer; the node only transmits input values to layer 2.
Layer 2—Wavelet layer: In this layer, each activation function can be represented 27

where a and b are the dilation and translation parameters, respectively, which are self-learning based on the following adaptive laws. The Mexican hat mother wavelet function is defined as follows

where
where m is the number of the neurons.
Layer 3—Output layer: With the self-recurrent rules, the output of the SWC is as follows 14

where

Structure of the fuzzy self-recurrent WNN.
Fuzzy self-recurrent WNN
In comparison with the Mamdani, the fuzzy logic systems (FLS), and the TSK, the TSK model is more useful for the application of real-time operations. However, the TSK cannot wholly reflect the characteristics of the ELS system with limited rules; the SWC is incorporated into the TSK model to improve the control rapidity and accuracy. A typical fuzzy WNN for approximating the nonlinear function can be depicted by the linguistic rule. 11
If

where

In summary, the output of the fuzzy self-recurrent WNN controller (FSWC) can be obtained

where
Considering the universal function approximation property of the FSWC, there exists an expansion of (25) so that it can uniformly approximate the ideal backstepping controller28,29

where

where

where

where

Substituting equation (28) into equation (29) yields

where
VS learning algorithm
Considering the trade-off between the computation loading and the learning performance, an online VS learning algorithm is proposed to determine whether or not to add and prune the number of the neurons. The output of the SWC is represented as the index to add a neuron

where

where

where the initial value setting of
Stability analysis
The developed VSFSWC and CC is shown in Figure 2, which is composed of a VSFSWC and a CC. The controller output is given as follows 31

where the output of VSFSWC

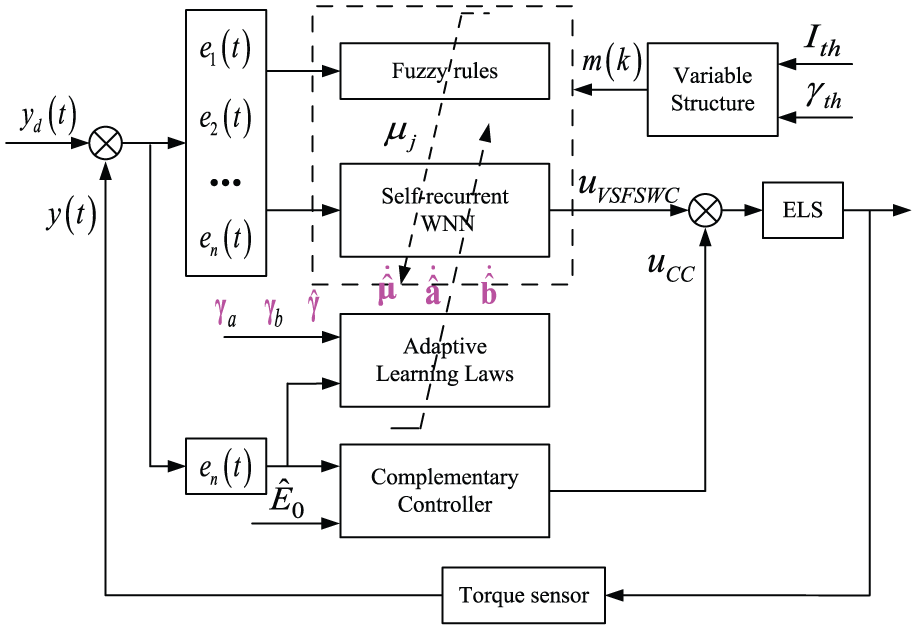
Block diagram of the VSFSWC and CC.
Then substituting equation (32) into equation (37), the equation (38) can be obtained as follows

In this article, the CC is designed as follows

where
In order to guarantee the system stability, the Lyapunov function candidate is given as follows

where

The adaptive learning laws of the VSFSWC and CC are given in the following so that the convergence of the proposed algorithm is guaranteed



Then taking advantage of equations (39) and (41), we can obtain the following

For achieving

Then equation (44) can be rewritten as

As a result, similar to the discussion in the above section, the asymptotical stability of the proposed control system can be guaranteed in the sense of the Lyapunov theory.
Simulation
In this section, the proposed control algorithms are applied to validate the feasibility and effectiveness, and the reference commands with different algorithms are applied to the HIL simulation platform for the ELS as shown in Figure 3, which are evaluated by the root mean square error of the output torque. The host control computer with the proposed algorithm to achieve torque tracking control of the ELS mainly analyzes and calculates the feedback torque of the torque sensor, the compensation torque of inertia disks, and the actual torque required. The signal conditioning center is mainly used for processing signals from the sensors and the configuration settings needed for the hardware switches. According to the output of the host control computer, the output of drive provides the appropriate current to drive the torque motor. The torque sensor is used to collect the output of the torque motor, which is fed back to the host control computer to form the closed-loop control for the loading torque. The function of the resolver is to gathering the angle position of the gear reducer, which can be used to calculate the real-time command torque for the torque motor. The function of the angular velocity sensor is to gathering the angular velocity of the gear reducer to provide more actual values for the identification methods and the control strategies. The angular acceleration sensor collects the angular acceleration at the end of the gear reducer to compute the inertia moment produced by the inertia disks. The number of inertia disks depends on the actual demand of the gun control system, which provides various rotational inertia values to simulate the inertia torque. The following simulations are carried out in an Inter core i5 CPU with 3.2 GHz rate, 4 GB RAM, and 64-bit operating system. The parameters of the actual gun system are as follows: the rotary inertia of the turret is 7000 kg m2, the total friction torque
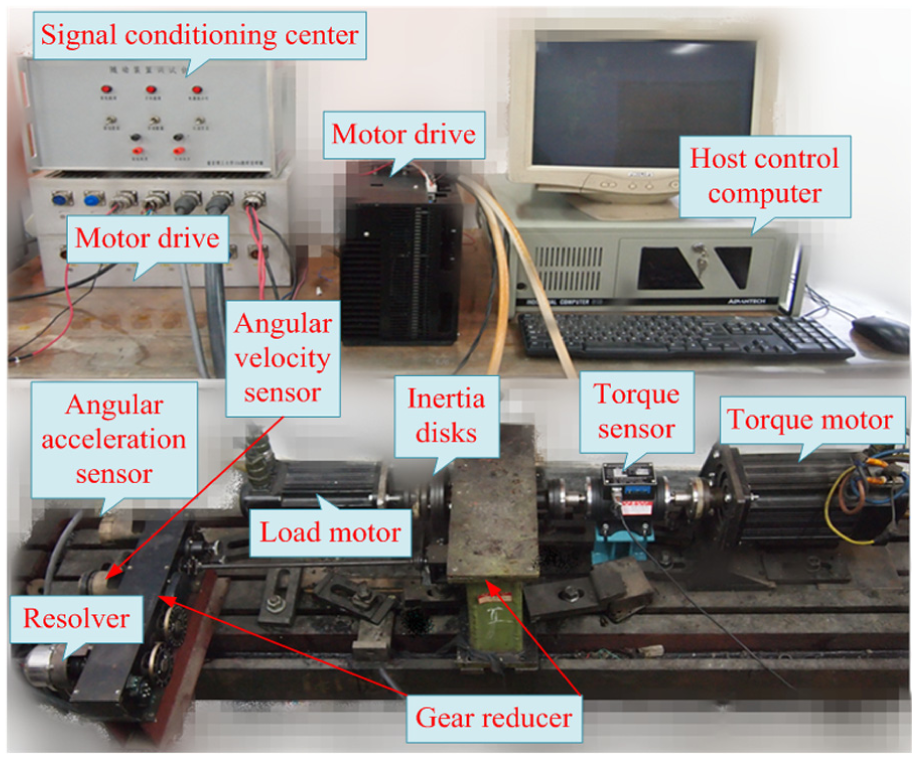
Components of the ELS.
Parameters of the torque motor.

Step response with external disturbance
In order to evaluate the proposed algorithms, such as SWC, FSWC, FSWC and CC, VSFSWC, and VSFSWC and CC, the step response with external disturbances is applied to the ELS when the load motor is blocked as shown in Figure 4. When the amplitude of the reference command is selected as 10 N, the VSFSWC and CC shows the best performance among all the proposed algorithms, which reaches the steady state in only 96 ms. Although there always exists torque tracking errors using the SWC, FSWC, and VSFSWC, the VSFSWC with smallest torque errors can meet the control requirements. When the CC is introduced into the FSWC and VSFSWC, the torque tracking errors are decreased effectively. An external disturbance is exerted to the ELS at the moment of 180 ms, the similar conclusion above is obtained, which further verifies the rapidity and stability to some extent.
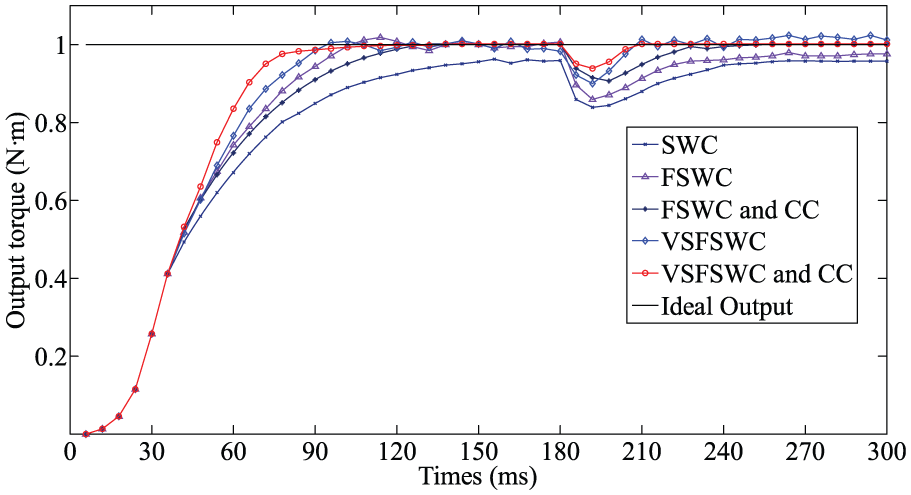
Step response of the proposed algorithms.
Static loading
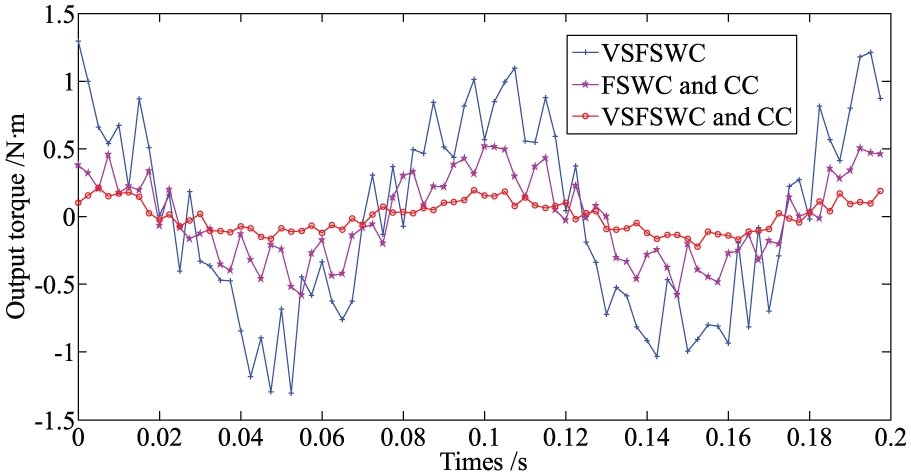
In order to analyze the influences of the load motor, the torque motor is working in the stationary state when the load motor is working in the amplitude of 1 rad and different frequencies, such as 1, 5, and 10 Hz. The control requirement of the load motor is 0.8 mil (1 rad = 954.93 mil). The VSFSWC, FSWC and CC, and VSFSWC and CC algorithms are carried out to show the existing extraneous torques in Figures 5–7. The results indicate that the output of extraneous torque is increasing when the frequencies become bigger, especially the bigger output are happening at the moment of changing the rotary direction of the load motor. The maximum and mean absolute values of the output torque are described in detail in Table 2, which further show that the VSFSWC and CC algorithm has great superiority than the VSFSWC and FSWC and CC. The mean tracking errors of the load motor meet the gun control system requirements, which have nothing to do with the torque motor and the control algorithms when the torque motor works in the stationary state, although the load motor works in different frequencies.

1 Hz extraneous torques.

5 Hz extraneous torques.
10 Hz extraneous torques.
Values of the output extraneous torque and track error.
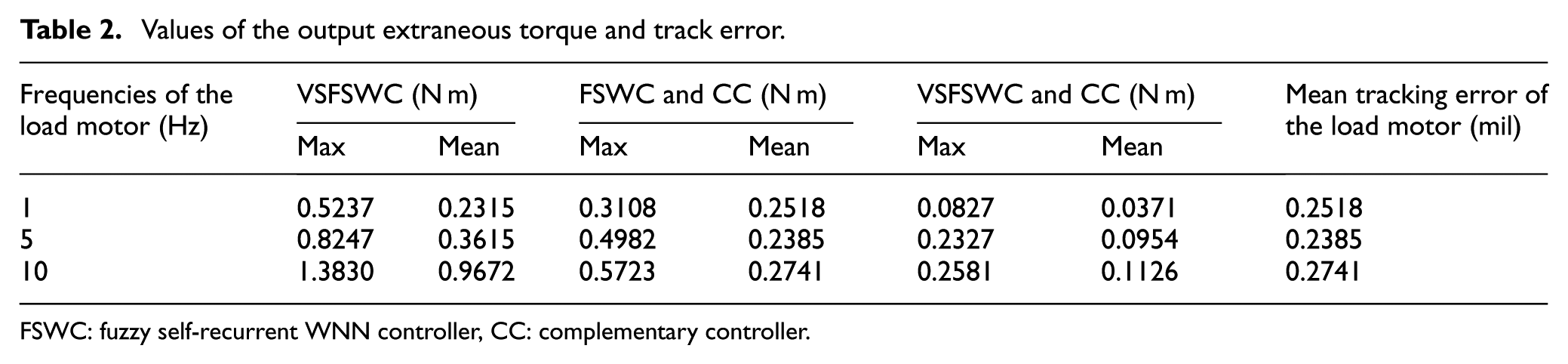
FSWC: fuzzy self-recurrent WNN controller, CC: complementary controller.
Dynamic loading
To validate the torque tracking performance with the load motor’s position disturbance, the torque motor is working in different amplitudes and frequencies when the load motor is working in the motion
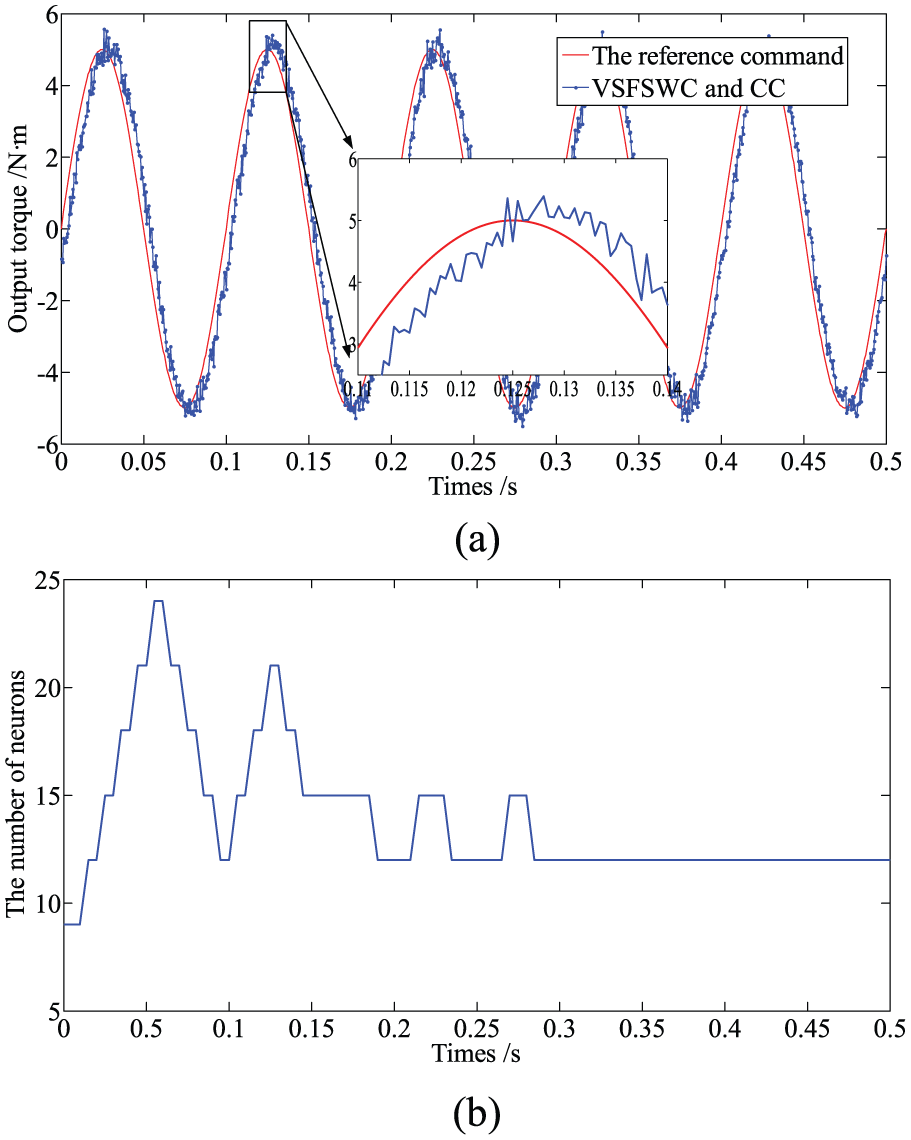
Sinusoidal tracking with
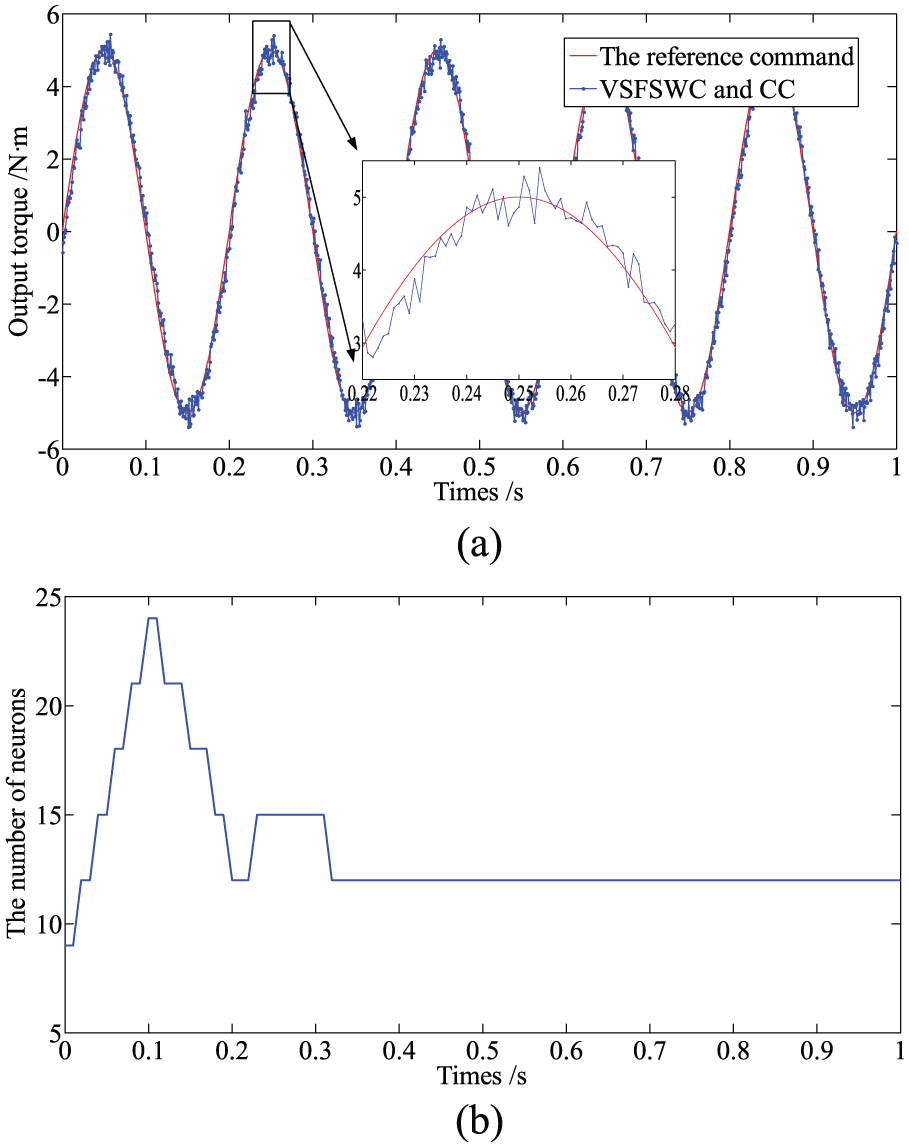
Sinusoidal tracking with
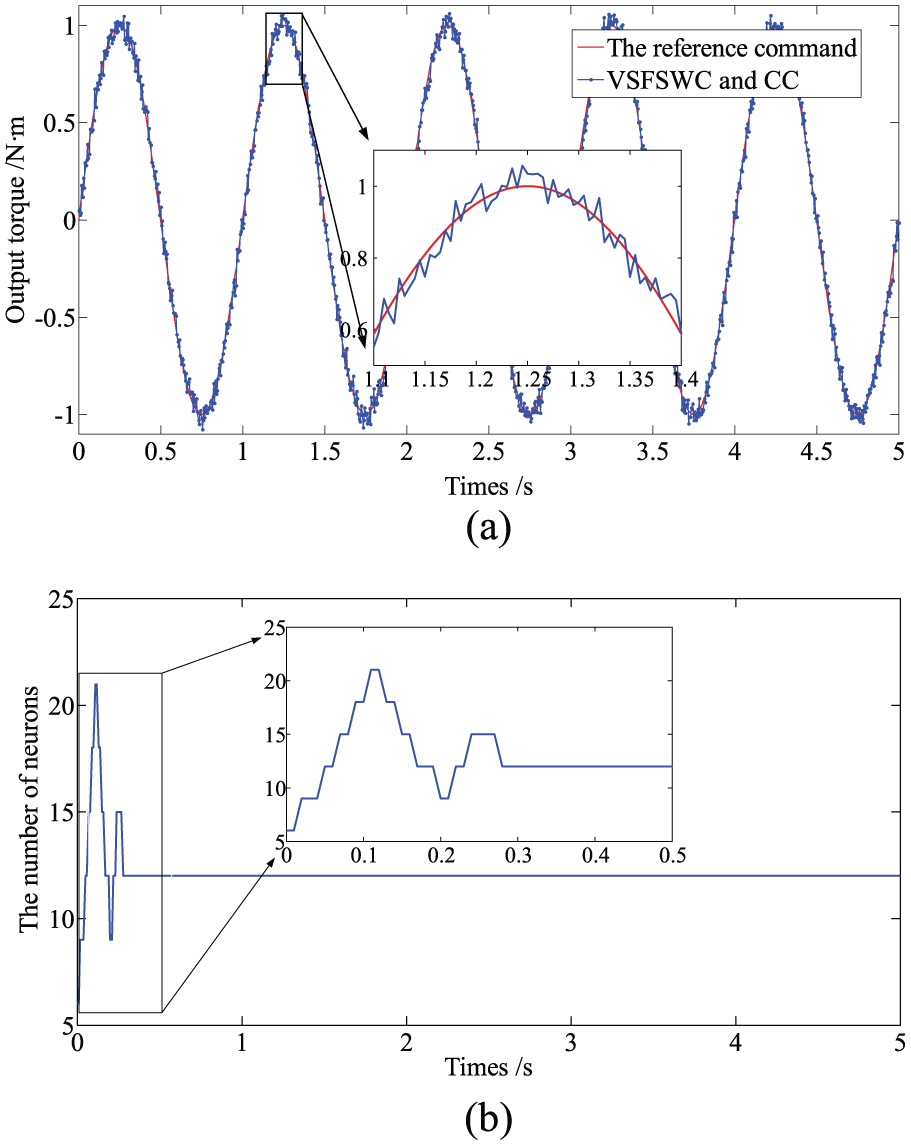
Sinusoidal tracking with

Sinusoidal tracking with

Sinusoidal tracking with
Comparison of different reference commands and mean tracking errors.

In Table 3, the mean tracking errors of the load motor meet system control requirements. However, the smaller the reference command amplitudes of the torque motor and the higher the reference command frequencies of the torque motor (within certain limits), the worse the control performance of the torque motor and the bigger the mean tracking errors of the load motor. In addition, the figures about the number of neurons further show that the better the control performance, the less the neuron number. However, what we need to remind is that the control performance is relatively worse when the direction of the torque motor is changed, which plays a negative effect on the overall performance and need to be further studied in the future.
Different connection stiffnesses
In order to further evaluate the proposed algorithms, we change the connection stiffnesses of the ELS system by different couplings and torque sensor. The different connection stiffnesses play effects on the ELS in Figure 13;

Bode comparison with increasing
From Figure 13, the frequency characteristic curve is shown when the connection stiffness is increased by five multiples. The system shear frequency is increasing and the phase characteristic tends to be steep when the connection stiffness is improved, which also broadens the system bandwidth. However, the bigger resonance peak happens when the system bandwidth is over-extended, which leads to the system instability. Therefore, aiming at different connection stiffness, the proposed VSFSWC and CC is applied to the ELS when the torque motor is working in the motion
Comparison of different connection stiffnesses.

Robustness performance
The robustness performance is evaluated by changing the number of inertia disks and the frequencies of the load motor with the proposed VSFSWC and CC algorithms when the torque motor is kept working in the stationary state. From Table 5, it is clear that the number of inertia disks has no specific relationship to do with the control performance, but with the same parameters of the above controller, there inertia disks show better control performance. When the frequencies of the load motor are becoming bigger, the control performance is relatively worse. However, all the experimental results meet the gun control system requirements, which further show that the proposed controller takes advantages of the robustness and application performance.
Comparison of robustness performance.

Conclusion
In this article, the VSFSWC and CC is proposed to address the complexities in the ELS, which is composed of two terms, one is used to construct equivalent nonlinearities and uncertainties, the other is designed to eliminate the effect of the approximation error. Moreover, in combination with ideal backstepping controller, the adaptive learning laws are introduced to guarantee the control system stability in the sense of the Lyapunov theory. Finally, extensive comparative simulations and experiments prove that the ability of suppressing the negative influence of the extraneous torque and improving the dynamic torque tracking performance is significantly promoted. In future works, the authors intend to further study the effect of changing the direction of the torque motor.
Footnotes
Academic Editor: Yaguo Lei
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.