
Abstract
This paper proposes an alternative optimal fuzzy high-gain observer design scheme. The structure of the proposed observer is represented by the Takagi-Sugeno fuzzy model and has the integrator of the estimation error. It improves the performance of a high-gain observer and makes the observer robust against noisy measurements, uncertainties and parameter perturbation. The proposed observer adopts the
1. Introduction
Over the past few decades, observer design has been a very active field and has turned out to be much more difficult than control problems, since states are partially or fully unavailable in many practical control problems; the state variables are not accessible for direct connection or, sensing devices or transducers are not available or very expensive. In such cases, observer based control schemes should be designed to generate estimates of states. Much research on observer design for nonlinear systems has been carried out based on fuzzy models. In the structure of fuzzy models, the Takagi–Sugeno (T–S) fuzzy model is widely accepted as a powerful tool for the design and analysis of fuzzy control systems [1–6].
The T–S fuzzy model expresses a highly nonlinear functional relation in spite of a small number of implications of fuzzy IF–THEN rules [7, 8]. The T–S fuzzy model approximates a nonlinear system with the combination of several linear systems [8]. The benefit of using the T–S fuzzy model is its mathematical simplicity of analysis. Fuzzy systems are supposed to work in situations where there is a large uncertainty or unknown variation in plant parameters and structures. Generally, the basic objective of adaptive scheme is to maintain consistent performance of a system in the presence of these uncertainties. Therefore, advanced fuzzy systems should be adaptive. Adaptive schemes for nonlinear systems that incorporate fuzzy systems have been enormously popular [6, 9–13].
The technique, known as a high-gain observer, is to design the observer gain to make the observer robust against model uncertainties in nonlinear functions [14]. Hence, it works for a wide class of nonlinear systems. However, high gains may excite hidden dynamics and amplify measurement noise: large oscillations in the transient response and sensitivity to measurement noise. Thus, a high-gain observer could not be applicable in practice. In order to overcome such a problem, several researchers have successfully designed sliding-mode approaches to construct observers that are highly robust with respect to noise in the input of the system. However, it turns out that the corresponding stability analysis cannot be directly applied to situations that present output noise. Therefore, it is still a challenge for the control system community to suggest a manageable technique to analyse the stability of identification error generated by sliding-mode type observers whose structure is obtained by differential-algebra techniques [15, 16].
The author earlier proposed a robust adaptive fuzzy high-gain observer (RAFHGO) [17]. It is assumed that their states are unavailable and their parameters are unknown. The structure of the proposed observer is given based on the T–S fuzzy model. An indirect adaptive law is derived to estimate the unknown parameters and the stability analysis of the proposed observer is accomplished by the Lyapunov approach and fuzzy approximation error. The proposed observer improves the robustness of the existing high-gain observer against noisy measurements, uncertainties and parameter perturbation.
The goal of the previous research was to improve the performance speed of fuzzy observers. Therefore, it was designed based on a high-gain observer design technique. In general, the high-gain observer design technique enhances the transient response speed and diminishes the effect of uncertainties. Regarding its side-effects, however, high gains can excite the large oscillation in the transient response and increase the sensitivity to measurement noise. The difference between the initial value of an original system and that of the observer leads to a peaking phenomenon, which can be regarded as a constant type disturbance. RAFHGO overcame these side effects by adopting an integral control technique since the integral control technique ensures asymptotic regulation under all parameter perturbations and does not destroy the stability of the closed-loop system [18]. Hence, RAFHGO encompassed enhancements such as a fast transient response and insensitivity against the constant type disturbance.
However, there still remain several problems to be considered in RAFHGO. First, only the constant type of disturbance is attenuated by RAFHGO, while disturbance is a random signal in practice. Secondly, the fuzzy modelling step has to be performed repeatedly to minimize fuzzy approximation errors. Due to these problems, RAFHGO is restricted within a narrow bound in terms of robustness and requires a long calculation time.
In this paper, the optimal fuzzy high-gain observer (OFHGO) is proposed as an advanced version of RAFHGO to overcome the aforementioned problems. OFHGO adopts the
The rest of this paper is organized as follows. In the Section 2, the T-S fuzzy system is reviewed and RAFHGO is introduced briefly. The proposed observer OFHGO is designed in Section 3 and Section 4 presents a convergence analysis of OFHGO. Comparative simulation results with RAFHGO are illustrated to demonstrate the effectiveness of OFHGO in Section 5. Finally, the paper is concluded in Section 6.
2. Preliminary
This section reviews RAFHGO, as introduced in earlier work [17]. It achieves a fast transient response and insensitivity to constant disturbances. T-S fuzzy modelling was used to represent the system. In the observer structure, a high-gain observer design technique and an integral control technique were added.
2.1. State-space Representation and T-S Fuzzy Modelling
The state space representation of the system can be described as follows:
where
Because the functions

where
The nonlinear system (1) can be expressed with the T-S fuzzy model form as follows:
The objective of RAFHGO is to improve the speed performance of fuzzy observers. For this purpose, the T-S fuzzy model is used to represent the structure of RAFHGO and the high-gain observer design technique and integral control technique are used in the observer structure.
2.2. RAFHGO Design
RAFHGO has the following observer structure, which includes the high gain observer design technique and the integral control technique.
Structure



where

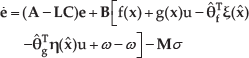
Error dynamics
The observation error is defined as:

The error dynamic equation can then be obtained as (8) and (9) by substituting (3) and (4) into (7):


The best approximations of


Using


where
By the state transition

where
RAFHGO enhances the error convergence speed and diminishes the effect of the model uncertainties of fuzzy observers. In addition, it reduces the sensitivity to measurement noise and the gap between the initial value of the original system and that of the proposed observer. However, RAFHGO is only able to overcome a constant type of disturbance, such as the aforementioned gap, even when the disturbance is a random signal in practice. Furthermore, a fuzzy modelling step has to be performed repeatedly in order to obtain the minimum fuzzy approximation error. This can cause RAFHGO to require a long calculation time. These problems have prevented RAFHGO from being used in practical systems. As a solution, OFHGO is proposed in this paper. The design method of OFHGO will be presented in the next section.
3. OFHGO Design
As an advanced version of RAFHGO, OFHGO adopts the
The structure of OFHGO is expressed as follows.
3.1. OFHGO Structure



where
The main point in this step is to add the auxiliary input v to the observer structure, which works to attenuate external disturbances. The error dynamic equation is as shown below.
3.2. Error Dynamics


According to


By the state transformation adopted for (12), (19) and (20) can be expressed as follows:
Where
4. Convergence Analysis
This section presents the convergence analysis of OFHGO based on Lyapunov stability theory. To accelerate the parameter convergence process, an adaptive projection algorithm is used. In addition, both a Riccati-like equation and the stability theory

then the matrix
Here,

for all
The convergence analysis is given in

and adaptive law as:
if
if

if

if

and an auxiliary control input as:

where the following notations apply:
V: positive definite and radially unbounded function
This adaptive law and V guarantee the asymptotic stability of

By substituting (21) and
Using (24), (25), (26), (27) and (28),

Integrating the above inequality from t to T yields:

Hence,
5. Simulation
OFHGO is applied to the synchronization of an unknown nonlinear system and the superior performance of OFHGO is emphasized in a comparison with RAFHGO. A Duffing forced-oscillation system is considered as the unknown nonlinear system. We start by representing the system using the T-S fuzzy model. In this regard, the techniques described in [7] are employed to construct fuzzy models for the Duffing system. In the following paragraphs, the system with the control input term is represented in the T-S fuzzy model framework.
<Duffing Forced-Oscillation Model [7]>

Assume that
where
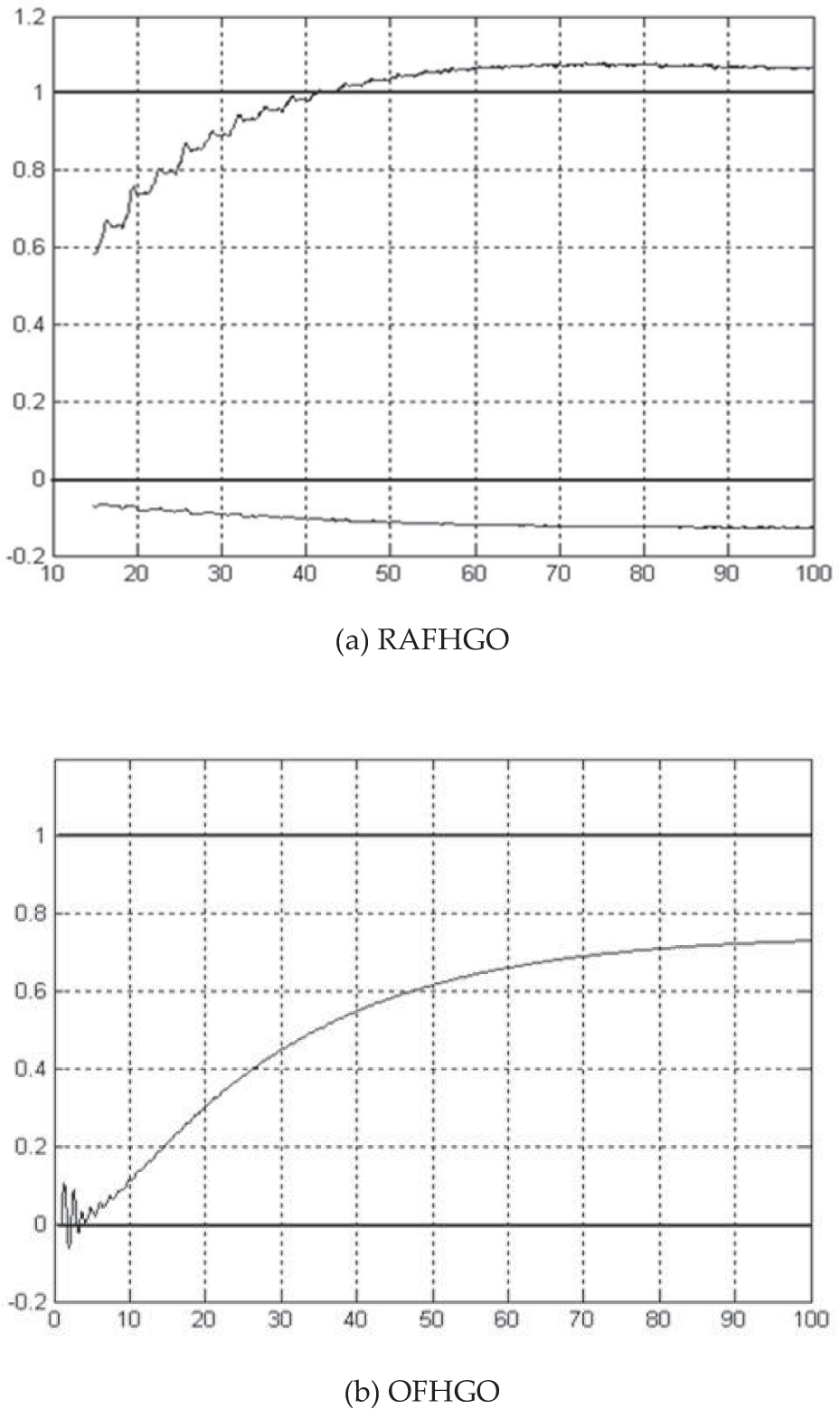
Figure 1 and Figure 2 show the parameter adaptation performance. It is clear that OFHGO is more robust against parameter perturbations than RAFHGO. The parameter perturbation of OFHGO is significantly reduced.
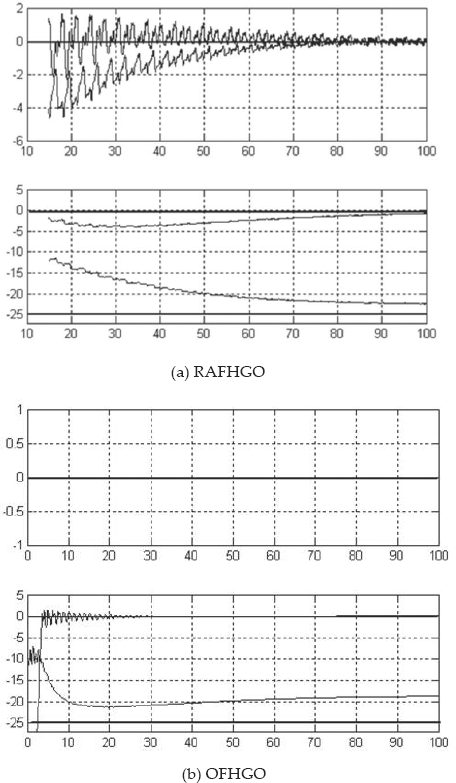
Comparison result of parameter adaptation
Comparison result of parameter adaptation
Figures 1 and 2 indicate the performance comparison result between RAFHGO and OFHGO. As it is readily recognized, all results of RAFHGO do not show its parameter adaptation status within 10 seconds, whereas OFHGO almost finishes estimating original parameters in 10 seconds.
In order to prove the robustness of OFHGO against disturbances, the disturbance signal illustrated in Figure 3, which is a Gaussian distributed random signal with a mean of 0 and variance of 1, is used.

Disturbance signal
Figure 4 depicts the synchronization results using both RAFHGO and OFHGO. It seems that both observers accomplish the state estimation (synchronization) successfully. However, although there was a Gaussian distributed random signal with a variance of 1, the magnitude of RAFHGO is bigger than 2. This means that RAFHGO cannot handle time varying disturbance and only captures the effect of the disturbance. On the other hand, OFHGO overcomes it and there is no change of magnitude. Secondly, even though the value of the observation error is too small to determine which method has better performance, in the time period from 0 seconds to 20 seconds, during which OFHGO finishes estimating the original states, RAFHGO continues to search for the original states. This demonstrates that OFHGO enhances the speed performance.

The synchronization result
6. Conclusion
This paper proposed an optimal fuzzy high-gain observer as an advanced version of RAFHGO to overcome the weaknesses of RAFHGO. Robustness against various types of disturbances was achieved through the use of the
Footnotes
7. Acknowledgments
This work was supported by the GRRC program of Gyeonggi province.
[(GRRC HANKYONG 2011-B01), Development of Transport Equipment for Smart Distribution Center].