
Abstract
Motion control is an essential part of industrial machinery and manufacturing systems. In this article, the adaptive fuzzy controller is proposed for precision trajectory tracking control in biaxial X-Y motion stage system. The theoretical analyses of direct fuzzy control which is insensitive to parameter uncertainties and external load disturbances are derived to demonstrate the feasibility to track the reference trajectories. The Lyapunov stability theorem has been used to testify the asymptotic stability of the whole system, and all the signals are bounded in the closed-loop system. The intelligent position controller combines the merits of the adaptive fuzzy control with robust characteristics and learning ability for periodic command tracking of a servo drive mechanism. The simulation and experimental results on square, triangle, star, and circle reference contours are presented to show that the proposed controller indeed accomplishes the better tracking performances with regard to model uncertainties. It is observed that the convergence of parameters and tracking errors can be faster and smaller compared with the conventional adaptive fuzzy control in terms of average tracking error and tracking error standard deviation.
Keywords
Introduction
Design and control of multi-axis motion systems have become a vitally important part in modern industry applications.1–9 Precise contour control for the X-Y stage mechanism has attracted much attention in many areas, such as work feeder of computer numerical control (CNC) lathe, CNC milling or drill press machines, and the work table of laser cutting and painting. Due to high stiffness and resolution properties, ball-screw architectures are usually employed in linear table which is broadly used in industry automation equipment, semiconductor manufacturing processes, and pharmaceutical machines. In general, X-Y stage is composed of X-axis and Y-axis motion mechanisms, in which each motion axis is driven by individual actuator such as DC and AC servomotor through high precision ball-screw module. There often exist several kinds of disturbance sources in this architecture, such as nonlinear friction, unmodeled dynamics, load disturbance, and coupled interference, and these will affect the precision and tracking performance of the controlled system.
The contour tracking system techniques can be classified as zero-phase error tracking control (ZPETC) methods,2,3
The sliding-mode control techniques for X-Y table of the CNC machine and nonlinear systems are presented in Lin et al.,
9
Wang et al.,
15
Hsueh and Su,
16
and Ahmed et al.
17
The adaptive fuzzy sliding approximation system
17
is proposed to consider the nth-order single-input and single-output (SISO) nonlinear systems. An adaptive law containing an approximate error feedback scheme is utilized, and its stability is also proved via Lyapunov theorems. The recurrent neural network (RNN) integral sliding-mode control system
18
based on a computed-torque design is developed to track various reference contours. This robust system management controller (SMC) is presented to deal with the uncertainty terms, while the RNN structure can eliminate the disadvantage of high-frequency chattering phenomenon for systems. With regard to the intelligent control methods, neural networks and fuzzy logic systems have been widely employed to the various control systems and mechatronic servo systems.15,19–24 Wang4,5 had proposed stable direct and indirect adaptive fuzzy controllers based on Lyapunov synthesis approach for SISO nonlinear systems. Yin and Lee
20
proposed a fuzzy model reference adaptive controller (MRAC) for the system with unknown parameters. Both the tracking error and the prediction error are combined, and the fuzzy MRAC provides more adaptation power than a traditional adaptive control solely based on either tracking or prediction error. Hsueh and Su
16
proposed a direct adaptive fuzzy control design with the use of the compensative controller. Based on the finite
The aim of this research is to design an intelligent controller that ensures to have a smaller trajectory tracking error. The single-axis dynamics of the servo system will be considered, and the corresponding model included the terms of a lumped uncertainty with parameter variations, external disturbances, and friction effect. This mechanism is actuated by a permanent magnet synchronous motor (PMSM) and controlled using an adaptive direct fuzzy system in this study. To alleviate the effect of unmodeled dynamics and external disturbance in X-Y stage, an output feedback control law and an update law are derived for online tuning the weighting factors of the fuzzy method. Using strictly positive-real Lyapunov theory, the stability of the closed-loop system compensated by the fuzzy control can be verified. The overall adaptive scheme guarantees that all signals involved are bounded, and the output of the closed-loop system asymptotically tracks the desired X-Y plane contour trajectory. It is shown that the tracking trajectory errors of the X-Y stage can converge smoothly and fast than the conventional adaptive fuzzy control methods.
This article is organized as follows: The dynamic model of X-Y stage and fuzzy logic scheme are introduced in section “System model of biaxial motion system.” The direct adaptive fuzzy controller design is described in section “Direct adaptive fuzzy control method.” Section “Proposed direct fuzzy control method” presents the proposed adaptive fuzzy control structure for the various contour tracking performances. Section “Simulation and experimental results” provides the simulation results. Finally, a brief conclusion is given in section “Conclusion.”
System model of biaxial motion system
Stage dynamic model
The typical mathematical modeling of the PMSM7–9,18,26 in the synchronously rotating rotor reference frames can be derived in the following. The stator voltage equations in the d-q reference frame can be represented as follows


with

The developed torque of motor is given as
Based on realization of field-oriented control, the developed electromagnetic thrust force is given by

where

where

where

with
In practical application, the actual system model changes when the drive system operates under different circumstances. The mechanical dynamics in equation (8) with parameter variations, disturbance load, and unpredictable uncertainties will be considered as

with
Fuzzy controller structure
Adaptive fuzzy systems combine adaptive control theory and fuzzy systems cooperated with training algorithms used to adjust the parameters according to numerical input or output data. Many attractive features of fuzzy systems are presented such as ability of real-time learning, universal function approximation, and the identification of input and output for unknown systems. The proposed fuzzy system with a static system mapping from

where

where

where

where

The fuzzy system above can be proven in Lemma 1 to be a universal approximation in our controller design.
Lemma 1 4
Supposed that the input universe of discourse U is a compact set in

It is said that the fuzzy system with product inference engine, singleton fuzzier, Gaussian membership function, and center-average defuzzier is universal approximator. It can be used as an adaptive fuzzy controller for nonlinear motion stage system.
Direct adaptive fuzzy control method
In this section, a conventional direct adaptive fuzzy controller is described. A second-order dynamic system is represented by the following form


where x is the position variable of stage;


with



The optimal control law can be defined as follows

where

where


So, the closed-loop dynamic equation can be rewritten in vector form as follows

with


Since matrix

where

with
Consider the continuous differentiable Lyapunov function

where
The last one row of

where matrix
Proposed direct fuzzy control method
Fuzzy control has been widely applied in many practical engineering applications since it uses as a mean of capturing the human knowledge and experiences. An adaptive fuzzy system with the online learning characteristic is developed to compensate for the finite approximation errors and system dynamic uncertainties. Figure 1 shows the block diagram of our proposed direct fuzzy controller for a single-axis dynamic system. This adaptive learning method using the tracking errors and sliding-mode variables are adopted to implement the fuzzy-based controller. Consider a second-order dynamic system of single-axis feed drive mechanism which is given as


where D is the external disturbance and

with

where

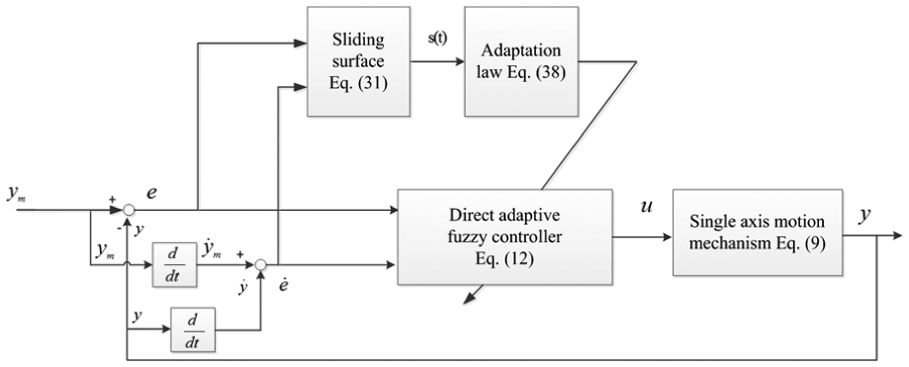
Block diagram of the proposed direct fuzzy controller for single-axis motion stage
Substituting equation (35) into equation (32) and by some mathematical rearrangement, the following can be obtained

Define the optimal parameters

where

The approximation error is bounded, that is

with
The adaptation law can be chosen as follows

where

with

with
where the parameter

The time derivative of Lyapunov function of V is given as

Appendix 1 gives a detailed derivation of the function
Simulation and experimental results
This section presents simulation and experimental results of our proposed algorithm to demonstrate the tracking capabilities under different contours. The direct adaptive fuzzy controller is presented to verify the performances of smaller tracking error and the robustness to disturbance uncertainties. The system parameters and friction models of X-Y table are listed in Table 1. Two types of control methods are compared, and those are (a) the conventional direct fuzzy method and (b) the proposed direct fuzzy method. The controller parameters and fuzzy membership functions are listed in Table 2. Let the initial state
Simulation parameters of dynamic model and friction model.

Adaptive fuzzy controller parameters.

Performance index and contour planning
In this section, the effectiveness of the proposed adaptive fuzzy control method is examined to confirm the tracking characteristics. Two indexes 7 are employed to demonstrate the motion performances. They are the average tracking error and tracking error standard deviation. They are defined as follows:
1. Average tracking error

with
2. Tracking error standard deviation
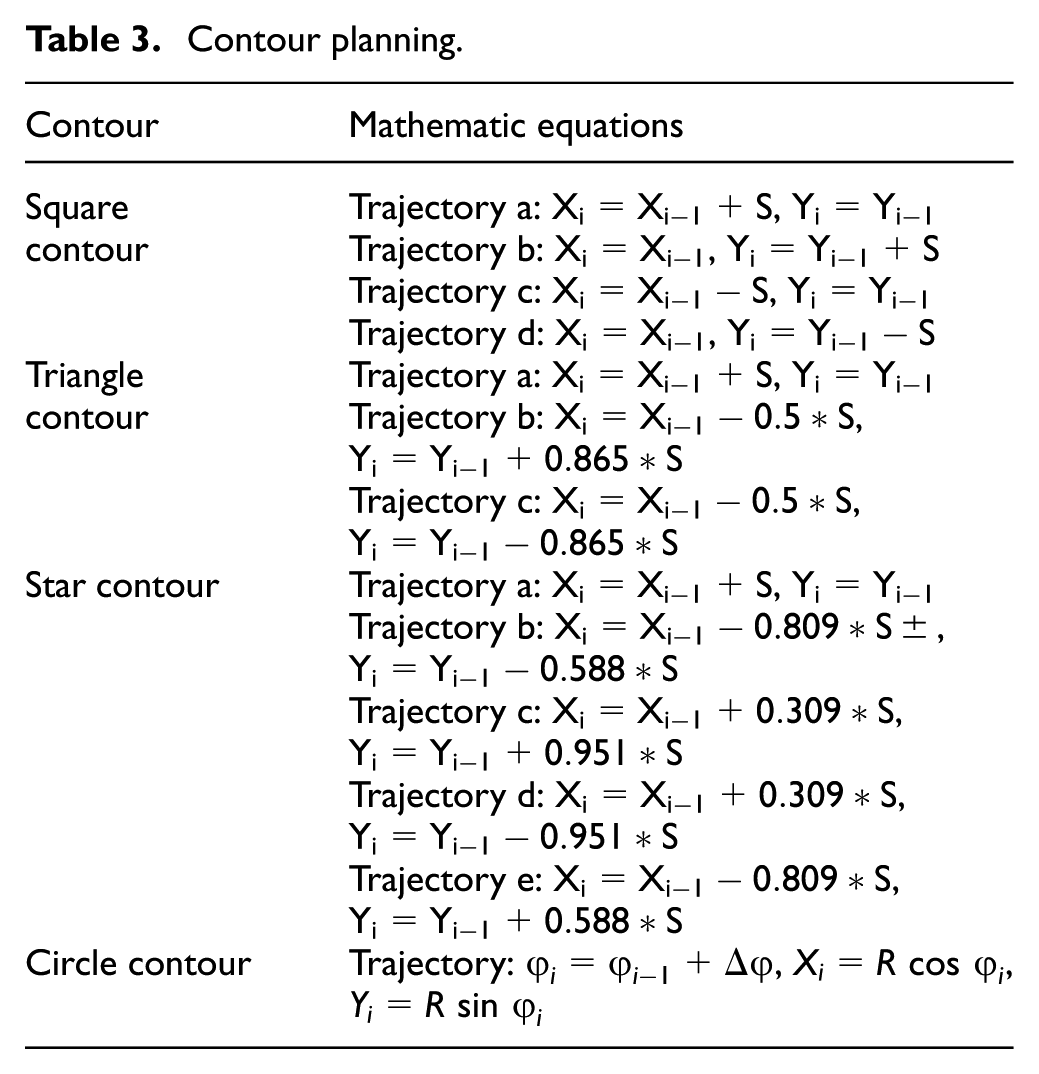
The average tracking error, maximum tracking error, and tracking error standard deviation are usually used in contour performance comparison. In this research, four kinds of contours are involved to evaluate the performance of the proposed fuzzy biaxial motion control system. The motion commands of the X-axis and Y-axis are always designed individually, and the various contour planning are described in the following equations. A total of four reference contours are designed and shown in Figure 2. The mathematic equations are given in Table 3. In this contour planning,

Two-dimensional reference trajectories: (a) square contour, (b) triangle contour, (c) star contour, and (d) circle contour.
Contour planning.
Contour tracking performances
In this section, the simulation results with the conventional fuzzy method and the proposed method are conducted and compared to verify the tracking performances. Figure 3 shows the tracking results corresponding to the square trajectory case in the X-axis and Y-axis, respectively. A reference square contour of 10 mm width is applied for two-dimensional motion validations. The simulation results of the position response, tracking error, force command, and motion trajectory are depicted in Figure 3(a)–(g). It demonstrates that the proposed direct fuzzy control method is effective for trajectory tracking performances. On average, the average tracking error is 41.452 µm, and the tracking error standard deviation is 2.491 µm. In the second case, a triangle contour of 10 mm side length is considered and shown in Figure 4. The start point of position is set at (0, 0). Our proposed scheme also performs well in triangle displacement response, tracking error, force command, and trajectory, as shown in Figure 4(a)–(g). The transient response provides the robustness fact of the direct fuzzy controller under parameter variations and external disturbances. On average, the average tracking error is 39.646 µm, and the tracking error standard deviation is 2.468 µm in the triangle tracking case.

Two-dimensional displace response for the square contour tracking: (a) X-axis position tracking response, (b) Y-axis position tracking response, (c) X-axis position tracking error, (d) Y-axis position tracking error, (e) X-axis force command, (f) Y-axis force command, and (g) square contour tracking trajectory.

Two-dimensional displace response for the triangle contour tracking: (a) X-axis position tracking response, (b) Y-axis position tracking response, (c) X-axis position tracking error, (d) Y-axis position tracking error, (e) X-axis force command, (f) Y-axis force command, and (g) triangle contour tracking trajectory.
The third practical application is the star trajectory. A reference star contour of 10 mm side length is illustrated in Figure 5. It shows that the trajectory response is very smooth, and the steady-state error reduces significantly during the tracking process for direct drive biaxial X-Y system. On average, the average tracking error is 38.980 µm, and the tracking error standard deviation is 3.593 µm in the star contour case. Furthermore, the reference circle contour of 20 mm diameter is shown in Figure 6. It can be observed that the displacement error can be reduced significantly within 1 s. Figure 6(b) shows the Y-axis tracking response, and its plant model is different from X-axis one. It can be seen that the tracking error can be substantially improved, and the error is diminished within 2 s. In the beginning, trajectory route has deviated from the path of the reference. The adaptive fuzzy control architecture can accomplish the better tracking performance, and the trajectory error converges at steady state. On average, the average tracking error of is 20.164 µm, and the standard deviation of error is 4.395 µm.
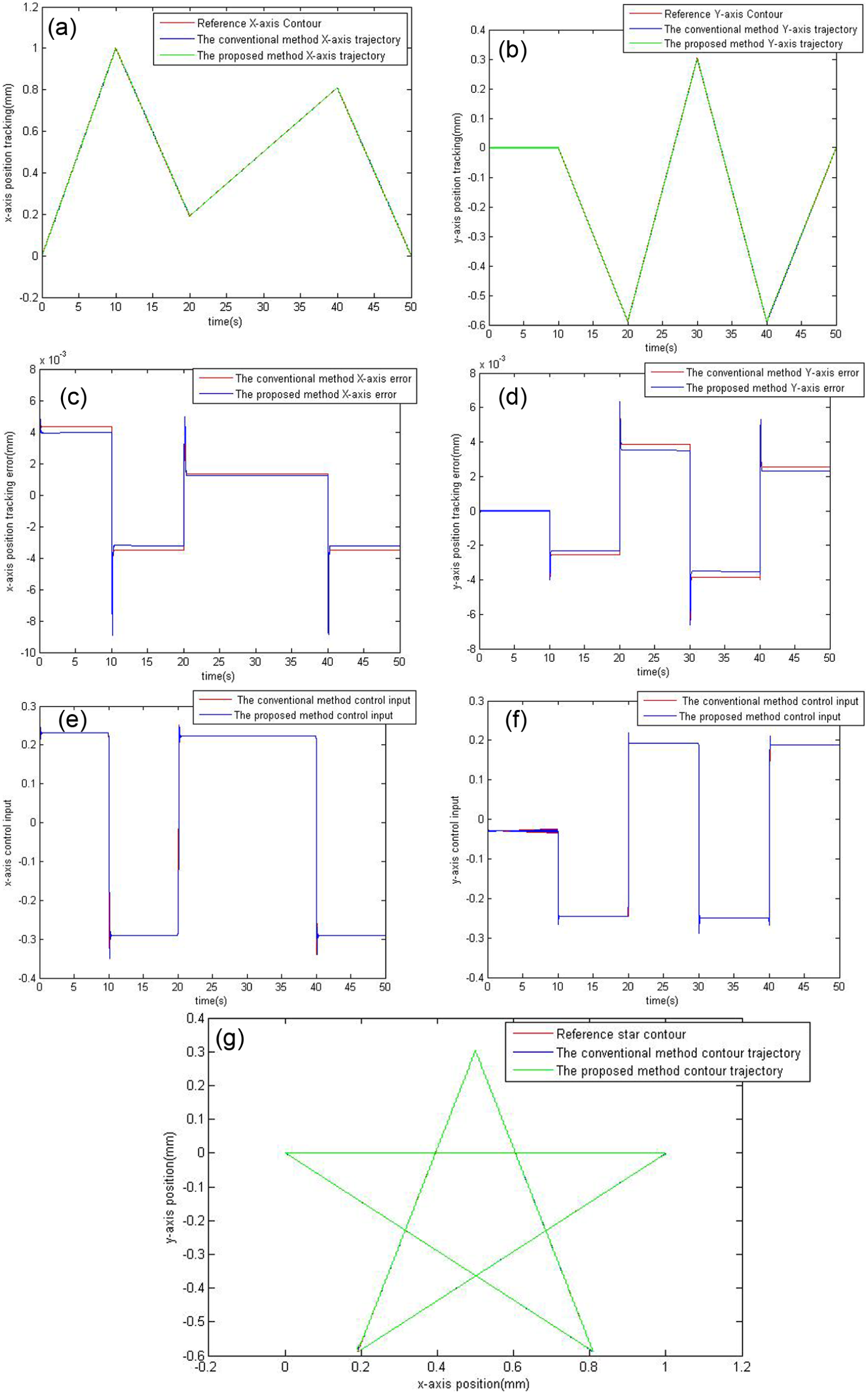
Two-dimensional displace response for the star contour tracking: (a) X-axis position tracking response, (b)Y-axis position tracking response, (c) X-axis position tracking error, (d) Y-axis position tracking error, (e) X-axis force command, (f) Y-axis force command, and (g) star contour tracking trajectory.

Two-dimensional displace response for the circle contour tracking: (a) X-axis position tracking response, (b) Y-axis position tracking response, (c) X-axis position tracking error, (d) Y-axis position tracking error, (e) X-axis force command, (f) Y-axis force command, and (g) circle contour tracking trajectory.
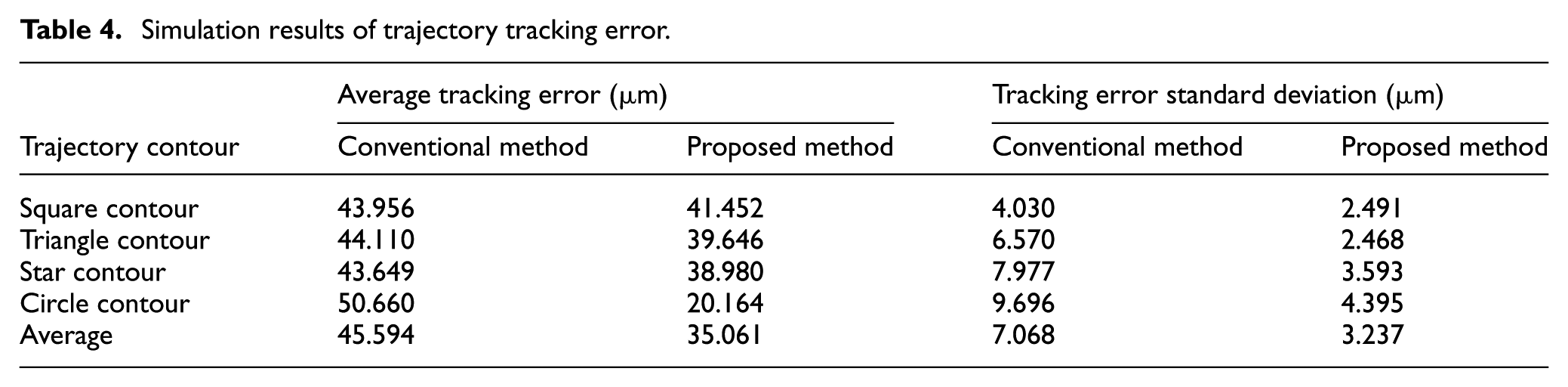
Table 4 shows the tracking error values of our proposed method compared with the traditional direct fuzzy method. It can easily find that the proposed adaptive fuzzy control system has the least average and standard deviation of tracking error and is more suitable to control the X-Y table under the occurrence of uncertainties at various reference trajectories. One can find that our method achieves the better accuracy performances in terms of 23.1% improvement for average tracking error and 54.2% improvement for tracking error standard deviation compared to the conventional one. In summary, we can conclude that the proposed direct fuzzy approach allows the desired tracking performances to be attained and also ensure the robustness of the closed-loop system.
Simulation results of trajectory tracking error.
Experimental results
To verify the proposed control structure, the X-Y stage with ball-screw system driven by AC servo motors is shown in Figure 7. The optical shaft encoder is used to measure the position information, and the resolution of the encoders is set to 1 µm. Our system is designed using a PC-based controller with sampling rate of 1 kHz. The PC includes an analog-to-digital (AD) or digital-to-analog (DA) card with multichannels of analog-to-digital converter (ADC) and a motion control card. The stage has 260-mm travel for the X-axis and 350-mm travel for the Y-axis.

Experimental control stage system.
The circle contour of 100 mm diameter is tested in our experiments. The resulting contouring trajectory using the proposed method is shown in Figure 8, and the corresponding position tracking response for each axis is presented in Figure 8(a) and (b). It can be seen that the tracking error can be substantially reduced, and the error is diminished quickly. The adaptive fuzzy control architecture can accomplish the better tracking performance, and the trajectory error converges at steady state. On average, the average tracking error is 51.087 µm, and the standard deviation of error is 27.163 µm. Table 5 presents the tracking error values of our proposed method compared with the traditional direct fuzzy method in our experimental test. The proposed system can provide the smaller average and standard deviation of tracking error compared to the conventional one. It is found that our method achieves the better accuracy performances in terms of 22.137 µm for average tracking error and 12.99 µm for tracking error standard deviation for the four kinds of contour trajectories. The experimental results show that our approach can achieve a feasible solution to the contour control in stage system.
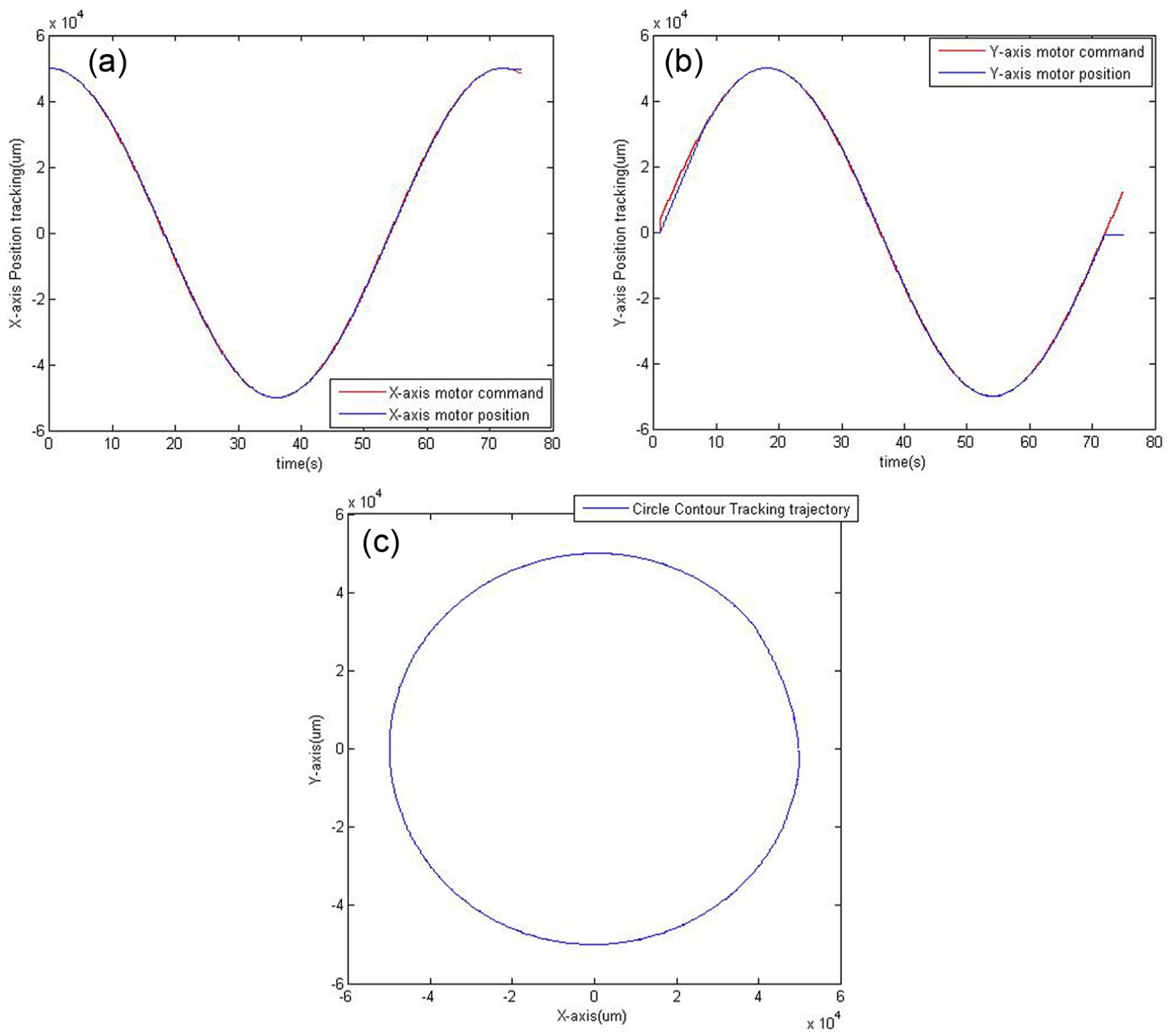
Experimental results of two-dimensional displace response for the circle contour tracking: (a) X-axis position tracking response, (b) Y-axis position tracking response, and (c) circle contour trajectory.
Experimental results of trajectory tracking error.

Conclusion
This article presents the adaptive fuzzy strategy with online training algorithm used for the precision motion control of X-Y stage. The nonlinear friction effect and external disturbance behavior are included in the dynamic system model. Based on the Lyapunov theorem, the adaptive laws of fuzzy coefficients can be obtained and utilized for contour application. The effectiveness of the proposed control system is illustrated by tracking of four motion trajectories, namely, (a) square contour, (b) triangle contour, (c) star contour, and (d) circle contour. The stability of the closed-loop direct drive X-Y system is guaranteed, and all control signals utilized are bounded. To validate the tracking performances, the control results obtained using our method are compared with the traditional direct fuzzy control structure under different contour conditions. The adaptive control scheme significantly reduces the contour error due to the friction and external disturbance, and it can achieve 23.1% and 54.2% improvement for average tracking error and tracking error standard deviation, respectively. The simulation and experimental investigations indicate that the proposed adaptive fuzzy controller can indeed perform well in precision control of X-Y stage system.
Footnotes
Appendix 1
Consider the Lyapunov function candidate
The time derivative of Lyapunov function of V is given as
Then, we have that
To guarantee equation (47) is >0, the feasible sets of
or
After some mathematical manipulation, the feasible region is expressed as
The set
The Lyapunov function
Integrate the function relative to time. Accordingly, it becomes
Because parameter
Acknowledgements
The authors would like to thank the Ministry of Science and Technology of the Republic of China, Taiwan, for financially supporting this research.
Academic Editor: Stephen D Prior
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The Ministry of Science and Technology of the Republic of China, Taiwan, financially supported this research under Contract No. MOST 103-2221-E-224-020- and MOST 104-2622-E-224-016-CC3.