
Abstract
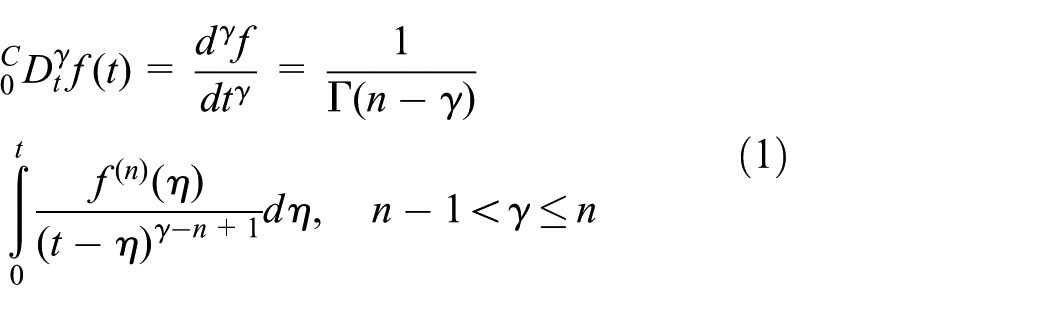
In this article, we obtain the viscous damping coefficient β theoretically and experimentally in the spring–mass–viscodamper system. The calculation is performed to obtain the quasi-period τ. The influence of the viscosity of the fluid and the damping coefficient is analyzed using three fluids, water, edible oil, and gasoline engine oil SAE 10W-40. These processes exhibit temporal fractality and non-local behaviors. Our general non-local damping model incorporates fractional derivatives of Caputo type in the range
Keywords
Introduction
In recent years, the representation of physical models based on non-integer order derivative has attracted a considerable interest due to the fact that these models can describe memory and the hereditary properties of various materials and processes.1–6 For example, fractional derivatives have been used successfully to model viscoelastic behavior of materials, 7 frequency-dependent damping behavior,8–14 viscoelastic single-mass systems, 15 and viscoelasticity and anomalous diffusion.16–19 Also, they are used in modeling of chemical processes, control theory, electromagnetism, thermodynamics, and many other problems in physics, engineering, and the various works cited therein.20–23
The spring–mass–viscodamper system is a dynamic system that provides a stage of minimal complexity to essentially study all the phenomena of mechanical vibrations. In this context, some researches concerning classical mechanics introduced fractional-order derivatives, for example, Kutay and Ozaktas 24 investigated the relationship of the Fourier transform of fractional order to harmonic oscillation. Ryabov and Puzenko 25 studied the fractional oscillator engaging the Riemann–Liouville fractional derivative. Caputo 26 studied the classic second-order differential equation of the damped oscillator; using this model, the author quantifies the response and the decaying oscillations of a seismograph; applying the fractional calculus (FC) approach, this model introduces the mathematical memory operator represented by the fractional-order derivative in order to model realistically the response curve of more complex instruments. Stanislavsky 27 dealt with generalization of the mechanical oscillator using fractional derivatives. Naber 28 found the analytical solution of the damped oscillator fractional equation using the Caputo derivative. The analytical solution of fractional systems mass–spring and spring–damper system formed using Mittag-Leffler function was analyzed in Gómez-Aguilar et al. 29
Based on this system, movements of structures in an earthquake can be studied.30–32 It is the basis for studying more complex dynamics, for example, floating structures could be an offshore floating structure or floating wind turbine;33,34 for all these cases, it is necessary to determine the coefficient of viscous damping. 32 FC has been used successfully to model applications in many branches of engineering, particularly for the design of rail pads, the dynamic analysis was conducted examining a spring–damper–mass system. 35 In this article, we are interested in applying FC for evaluating the damping coefficient β, in the fractional underdamped oscillator. The article is organized as follows: in section “Basic tools,” we give basic tools of FC; in section “The fractional damping model,” we present the fractional damping model. Then we present in section “Experimental setup” the experimental setup, and finally section “Conclusion” presents the conclusions.
Basic tools
Consider the space
where
Mittag-Leffler function has caused extensive interest among physicists due to its vast potential of applications describing realistic physical systems with memory and delay. A two-parametric function of the Mittag-Leffler type is defined by the series expansion as 3

In general, z is a complex quantity. When




The Laplace transform for the Mittag-Leffler function is given as

Then, the inverse Laplace transform has the form

From this expression, we have

The fractional damping model
The spring–mass–viscodamper system considered in this article is shown in Figure 1

Mechanical oscillator considered; m is the mass, the viscous damping coefficient is β, and the spring constant is k.
Equation (10) corresponding to the mechanical system

In previous studies of the fractional mass–spring–viscodamper system, the authors did not consider the physical dimensionality of the solutions. An alternative procedure for constructing fractional differential equation was reported in Gómez-Aguilar et al. 29 and successfully applied in Gómez-Aguilar and colleagues.37,38 In this context, to keep the dimensionality of the fractional differential equation, a new parameter σ was introduced in the following way

and

where γ represents the order of the fractional temporal operator and σ has the dimension of seconds; this auxiliary parameter is associated with the temporal components in the system (these components change the time constant of the system).
29
Ertik et al.
39
used the Planck time,

where the mass is m, the viscous damping coefficient is β, and the spring constant is k.
Equation (13) may be written as follows

where

The solution of equation (14) is

where
For the classical case

Experimental setup
First, consider the influence of the viscosity of the water; Figure 2 shows the system used. For this system, the mass m, measured in kilograms, is considered as the sum of the weight of the mass, denoted by

Mechanical oscillator used in the laboratory.
The spring constant k is measured (N/m); it is determined by measuring the elongation produced by the weight of the mass m. In view of Hooke’s law, only mass
The viscous damping coefficient β (measured in N s/m) is a theoretical parameter able to explain the energy dissipation due to friction that slows motion. It is not an actual physical parameter as the mass m and k spring constant, which can be accessed with a simple measurement.
The methodology followed to find an approximate value is described. In order to make time for which the mass passes through its equilibrium, we have attached a thin cardboard of negligible weight in the center of mass (whose shape is cylindrical). With the help of a timer, a piece of cardboard with dimensions of width 5 mm, length 5 cm, and thickness 1 mm and a laser measure the time it takes to move the mass break even; since the beginning of the experiment until it became indistinguishable to our measuring instruments, we take the time when the laser had an impact on the cardboard. The laser is placed in front of the mass–spring–damper system so that the laser beam formed an angle of 90° to the imaginary vertical line where the movement of the mass happens. The beam of light fell directly on the cardboard when the mass was at rest; see Figure 2.
Here, we show how we determined the viscous damping coefficient for water-based buffer, and for the other two, based on edible oil and motor oil, we did the same. For the first experiment (using water-based damper), Table 1 shows the different times for which the mass passes through its equilibrium.
Different times for which the mass passes through its equilibrium using the water-based damper.

In these times, we will calculate the quasi-period τ, while the mass takes to achieve two consecutive peaks (either maximum or minimum). For this, we consider the average of the consecutive differences in the time it takes to go through its mass equilibrium point; that is to say

The standard deviation of this measure is

with

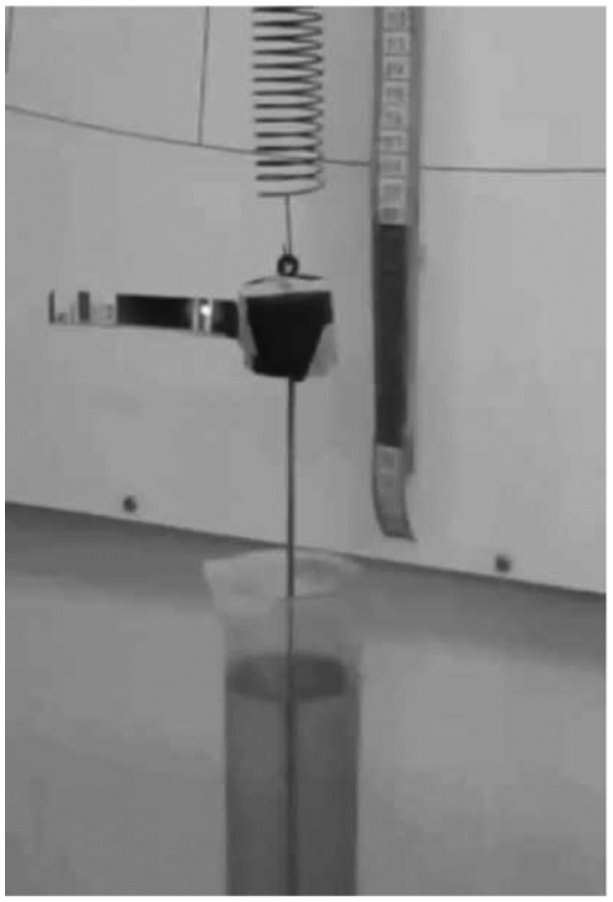
Mass–spring–viscodamper system used in this experiment.
In the fractional case, from equation (16) we have

where

For obtaining β, we have

where
Function Mittag-Leffler shape

where ν is an integer. The problem is finding the coefficients
The solution to the above equation is
Hilfer and Seybold
40
studied the inverse Mittag-Leffler function

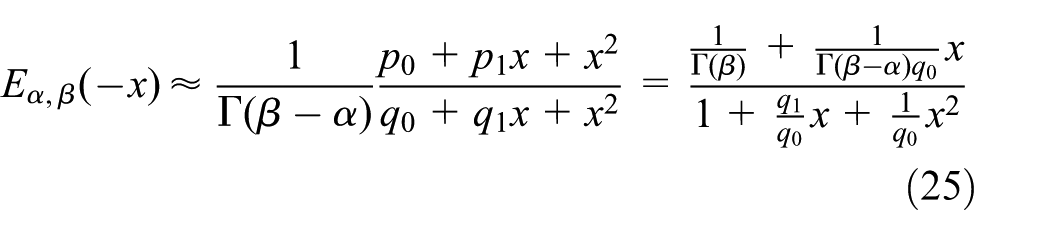
The global Padé approximation44–46 of the generalized Mittag-Leffler function

where
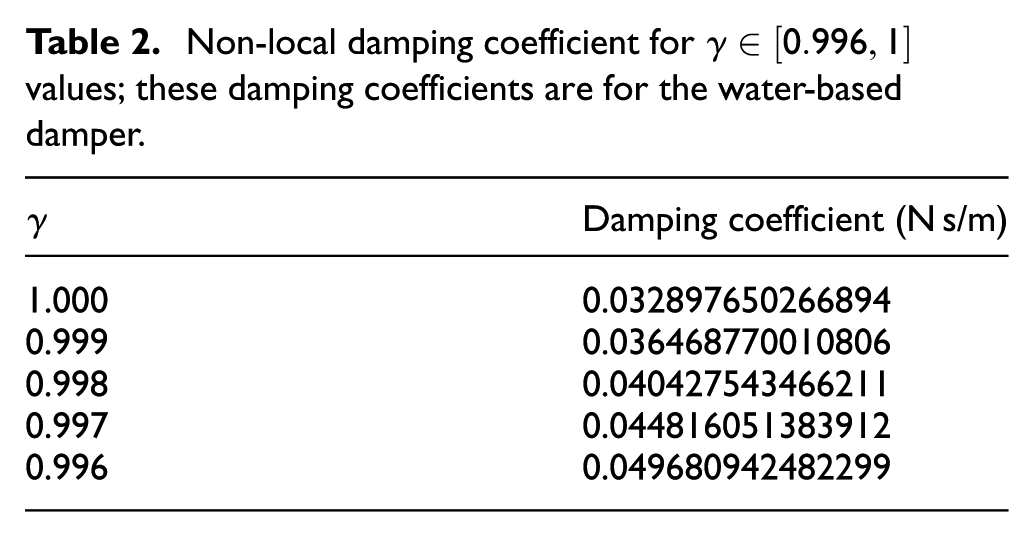
Table 2 shows the non-local damping coefficient defined by different values of γ.
Non-local damping coefficient for
In the classical case, considering
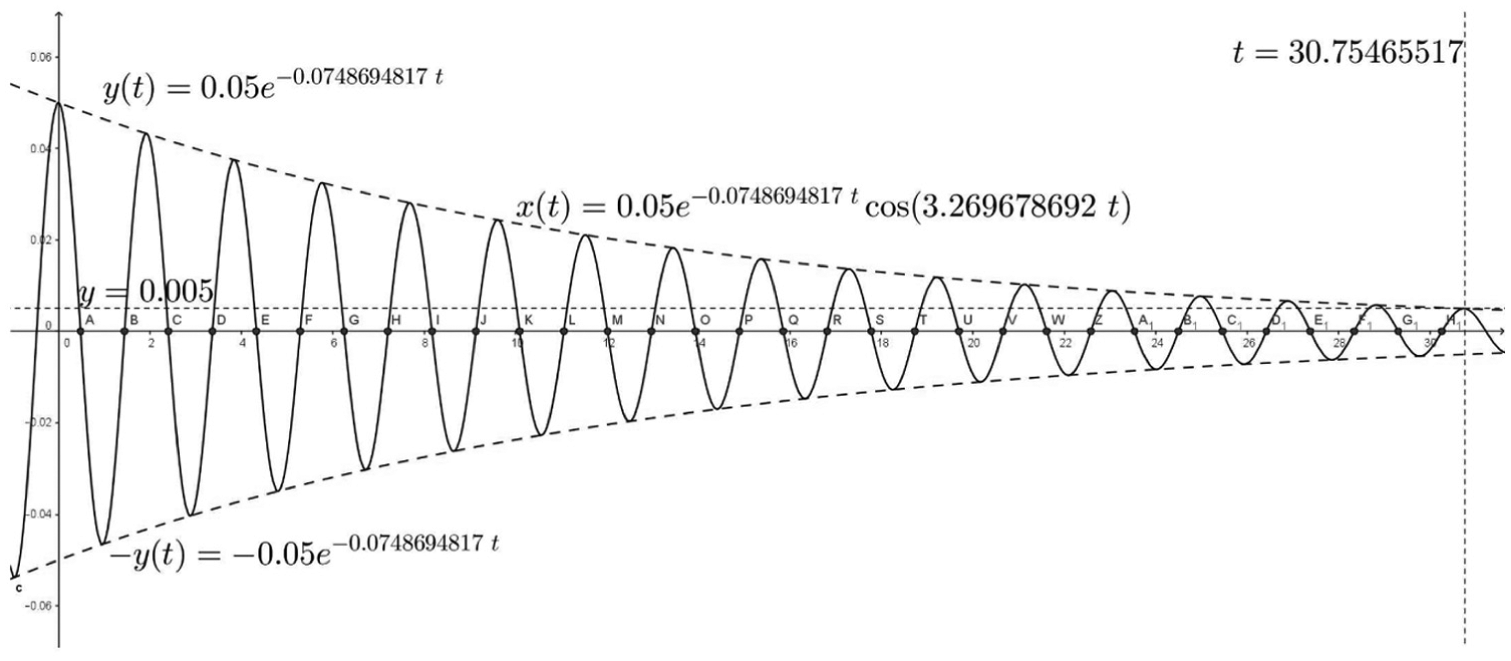
Graphical displacement of
The graph of
Roots of

Figure 5(a)–(d) shows different solutions of equation (16) for the classical case

Graphical displacement of
Now they are going to consider the results of studying a pair of oil-based buffers, one edible (sunflower oil) and one with gasoline engine oil (SAE 10W-40). Declining oil reserves worldwide have brought to the field of research on the physical properties of vegetable oils as lubricants for being renewable and have a high rate biodegradability. 47 The times measured for edible oil damper are shown in Table 4.
Times when the mass passes through its equilibrium point for the shock of edible oil.

With the times in Table 4,

The standard deviation of this measure is

Considering
Non-local damping coefficient for

In the classical case, considering

Roots of numerical simulation for

Figure 7(a)–(d) shows different solutions of equation (16) for the classical case

Graphical displacement of
The times measured for which the mass passes through the equilibrium point with oil motor–based damper are shown in Table 7.
Times for which the mass passes through its equilibrium using the damper with motor oil.

With the times in Table 7,

The standard deviation of this measure is

Considering
Non-local damping coefficient for

In the classical case, considering

Graphical mass displacement of
This graph has six cuts with the horizontal axis; these values are listed in Table 9. While our experience in the laboratory with the spring–mass–viscodamper system, we studied only system that crossed five times; see Table 7; this is because the quasi-period average employee came from measurements that we made during the experiment. This approach is sufficient for the purposes of this investigation.
Roots of numerical simulation for

Figure 9(a)–(d) shows different solutions of equation (16) for the classical case

Graphical displacement of
Conclusion
In this work, we obtain the viscous damping coefficient β theoretically and experimentally in the spring–mass–viscodamper system. The influence of the viscosity of the fluid and the damping coefficient is analyzed using three fluids, water, edible oil, and gasoline engine oil SAE 10W-40. Applying the Caputo fractional derivative to the classical equation of harmonic oscillator equation (16), a generalized model of this oscillator is obtained; the obtained solution incorporates and describes long-term memory effects (attenuation or dissipation); these effects are related to an algebraic decay related to the Mittag-Leffler function; in this context, when γ is less than 1, the fractional differentiation with respect to the time represents a non-local displacement effect of dissipation of energy (internal friction) represented by the fractional order γ; the fractional order is related to the displacement of the oscillator in fractal geometries.
In the classic case when
Because some authors replace the derivative of a fractional entire order in a purely mathematical context, the physical parameters involved in the differential equation do not have the dimensionality obtained in the laboratory; from the physical point of view of engineering, this is not entirely correct; in this representation, an auxiliary parameter
The methodology used to approximate the value of the damping coefficient is very accurate; discrepancies between the times measured in the laboratory with the numerical solutions are due to the way in which data and the dependence of the damping coefficient with the quasi-period were taken. But laboratory tests, even with their own technical difficulties of the experiment, are sufficient to support our research in analytical terms from the perspective of FC. Since they allowed to find the solution for the fractional dynamic model where the fractional order of damping changes continuously. We consider that these results are useful to understand the behavior of dynamical complex systems, mechanical vibrations, control theory, relaxation phenomena, viscoelasticity, viscoelastic damping, and oscillatory processes.
Footnotes
Acknowledgements
The authors would like to thank Mayra Martínez for the interesting discussions.
Academic Editor: Norman Wereley
Declaration of conflicting interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: José Francisco Gómez Aguilar acknowledges the support provided by Cátedras CONACYT para jóvenes investigadores 2014.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.