
Abstract
This article presented an improved nonlinear sliding mode control based on disturbance observer for the permanent magnet synchronous motor servo system. The position transient response performances, such as fast response and non-overshoot, are enhanced by the introduction of novel nonlinear sliding surface in the design of sliding mode control law. In order to abolish the analysis necessity of changeable uncertainties and alleviate the system chattering, the nonlinear sliding mode control algorithm is improved by adaptive parameter estimation and saturation function. Since the improved nonlinear sliding mode control algorithm is sensitive to mismatched uncertainties which are mainly due to the load disturbance, a disturbance observer is put forward to estimate the mismatched uncertainties and is integrated into control law design to improve the positioning accuracy. The stability of improved nonlinear sliding mode control based on disturbance observer is proved based on the Lyapunov approach. The simulation results demonstrate the effectiveness and robustness of the proposed improved nonlinear sliding mode control based on disturbance observer for permanent magnet synchronous motor servo system with stationary and dynamic trajectory tracking.
Keywords
Introduction
The permanent magnet synchronous motor (PMSM) has been widely used in many fields, such as high-performance computer numerical control (CNC) system, aerospace industry, and robot, owing to its advantages including compact structure, high power density, high inertia torque ratio, and high efficiency. 1 In order to acquire fast four-quadrant operation and smooth start and acceleration, the field-oriented control or space vector control is employed in the design of PMSM drive.2–4 However, PMSM is a time-varying nonlinear system with multivariable and strong coupling and easily influenced by the external interference. Furthermore, the model parameter mismatch and perturbation existed in the PMSM mathematical model of field-oriented control system since the model is built in the hypothesis of neglecting the influence of magnetic circuit saturation, hysteresis, and eddy current. Therefore, the traditional proportional–integral (PI) controller is unable to satisfy the dynamic response performance of PMSM due to its fixed proportional gain and integral time constant.5–7 In recent years, many nonlinear control strategies have been developed for PMSM servo system to improve the dynamic response such as neural-based robust control algorithms,7–9 adaptive control,10–13 H∞ control, 14 and sliding mode control (SMC).3,4
The SMC is employed frequently in the AC servo control system due to its good performance of fast response and insensitivity to the matched parameter perturbation and disturbance. The principle for designing SMC is to construct the sliding surface based on the system state variables. Zhang and Panda 15 presented the conventional linear sliding surface (LSS) used in PMSM speed control to make the system convergent within finite settling time. The non-singular terminal sliding mode manifold is proposed in PMSM speed regulation system to obtain a faster convergent speed and a better tracking precision. 16 Recently, SMC has been combined with intelligent control method to achieve better performance of PMSM control.17,18 However, according to the control law design of traditional SMC system with mismatched uncertainties, the states can only be driven to the sliding surface in finite time rather than the desired equilibrium. This leads to many researches on the SMC design for uncertain systems with mismatched uncertainties. The linear matrix inequality (LMI)-based sliding surface design for SMC has been proposed to guarantee the asymptotic stability of full order system with mismatched uncertainties.19–21 The disturbance observer (DOB) is also integrated into the SMC to counteract the mismatched disturbance.19–23 Yet, the transient response performances of the systems are rarely considered in these researches.
Actually, in the control systems, settling time, rising time, and overshoot are the main indexes for transient response. The fast settling and rising time with non-overshoot are necessary for many systems, such as aircraft control system, electromechanical control system, and power converter. However, the settling time and system stability are in conflict with each other, which means small settling time for systems will lead to high overshoot and vice versa. In order to increase the response speed of closed-loop system and reduce the overshoot, a composite nonlinear feedback (CNF) tracking control law is proposed which has a gradually increasing damping ratio with small initial value. 24 The principle is that in the initial state the system has a small damping ratio but fast response and along with the system output getting close to the desired value, the damping ratio is getting bigger to avoid the overshoot. The nonlinear sliding surface on the basis of CNF is presented to improve the convergence performance of system based on SMC algorithm. 25
However, the research of SMC with nonlinear sliding surface is under two preconditions. One is the prior knowledge of the matched parameter perturbation and external disturbance, and the other is that the mismatched disturbance of system is neglected. Both preconditions are hardly satisfied in most industrial applications. Then consequently, the improved nonlinear sliding mode control based on load disturbance observer (NSMC-DOB) is proposed in this article. In order to verify the feasibility of the proposed control law, the PMSM position servo system is used as the controlled plant. This article is organized as follows. First, when the mismatched disturbance is neglected and the prior knowledge of the matched disturbance is hypothesized as known, the nonlinear sliding mode control (NSMC) is used for PMSM servo system. This system has the distinct advantage of good transient response performance with fast response and non-overshoot. The prior knowledge of matched parameter perturbation and disturbance is used for determining the switching gain in SMC and is hard to determine. Therefore, the adaptive parameter estimation is designed to establish the switching gain. Meanwhile, the saturation function is combined to design the improved NSMC to reduce the system chattering under the condition of permissible system errors. In the PMSM servo system, the mismatched uncertainty is mainly due to the load disturbance. A DOB is designed to deal with the problem that the improved NSMC is sensitive to mismatched uncertainty. The new sliding surface is designed by combining the nonlinear sliding surface with DOB. The corresponding control law of realizing the robustness to the mismatched perturbations is also acquired and the stability analysis is deduced. At last, the effectiveness and robustness of the proposed improved NSMC-DOB for PMSM servo system are demonstrated by the simulation results with stationary and dynamic trajectory tracking.
Mathematical model of PMSM
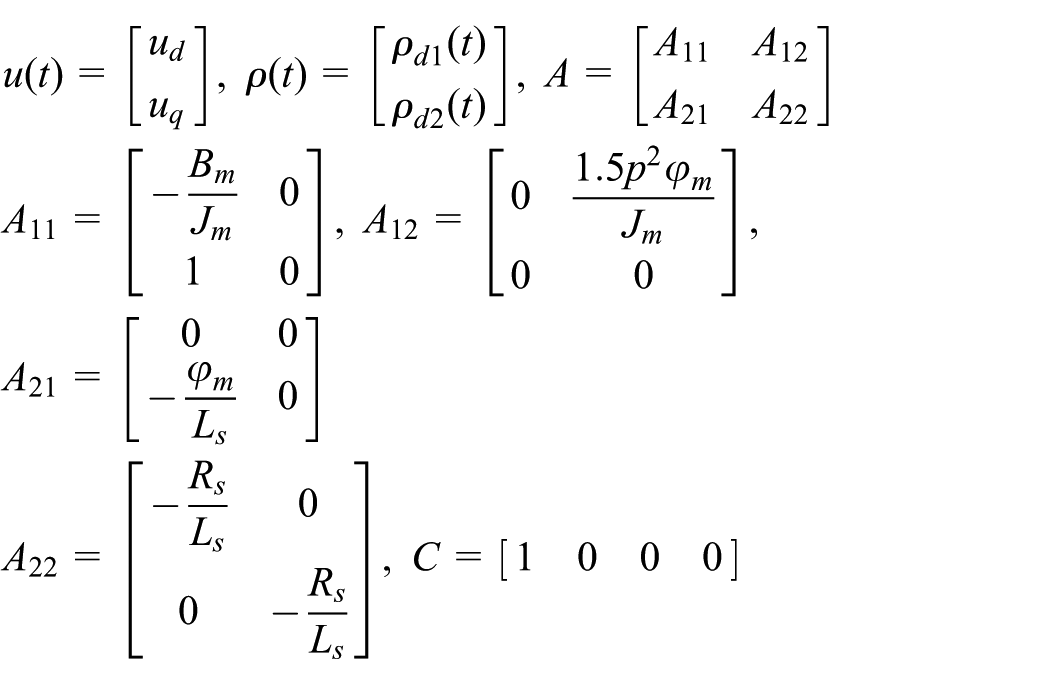
The proposed control system is based on the surface-mounted PMSM in which d and q axis stator inductance can be considered as Ld = Lq = Ls. Considering that the space magnetic field is distributed as sinusoidal field and neglecting the influence of magnetic circuit saturation, hysteresis, and eddy current, the continuous mathematical model for PMSM in d-q frame is as follows





It can be clearly seen from equations (1) to (3) that PMSM vector control system has a strong coupling between id, iq, and ωe. In order to decouple and be appropriate for analyzing and designing the NSMC, the auxiliary input variables are defined as


Supposed that ρ(t) = [ρd1(t), ρd2(t)]T is the continuous and bounded matched disturbance and parameter perturbation related to the system control input ud, uq and the boundary is defined as

Combining lumping uncertainties and load disturbance and using the feedback linearization by substituting above auxiliary input variables (6), (7) to get the linear PMSM d-q frame model as follows

Remark
Supposed that parameter perturbations of Jm and Bm are all attributed to the load disturbance Tl which is considered as mismatched uncertainties for the controlled system in this article.
Improved NSMC-DOB for PMSM servo system
NSMC for PMSM servo system without load disturbance
The novel nonlinear sliding surface is put forward for controlled system with matched uncertainties by Bijnan Bandyopadhyay et al. 25 Based on the nonlinear sliding surface, the system transient response performance is improved by the variable system damping ratio. The following system in regular form without load disturbance deduced from equation (9) is generally used to derive the NSMC algorithm


where x(t) = [x1(t), x2(t)]T. x1(t) = [ωe(t), θe(t)]T and x2(t) = [id(t), iq(t)]T are the mismatched and matched state variables with the control input, respectively
The reference trajectory x1_ref(t) = [ωe_ref, θe_ref]T, x2_ref(t) = [id_ref(t), iq_ref(t)]T for PMSM servo system can be acquired from the nominal PMSM model (1)–(5) and the variable error can be defined as


The novel nonlinear sliding surface is defined as



where I2 is a two-dimensional identity matrix and r is the desired rotor electrical angle. F is chosen to satisfy the condition that (A11–A12F) has stable eigenvalues and the dominant poles have a very low damping ratio. 25 P is the positive definite symmetric matrix calculated from Lyapunov equation below

where W is a known positive definite matrix.
ψ(y,r) is a non-positive function and continuously differentiable with respect to y. It is used to increase the damping ratio of the controlled system by changing itself from 0 or a tiny value to a negative constant as the rotor angle is gradually approaching the expected electrical value. In this article, ψ(y,r) is defined as

where k > 0, β > 0, and β should be big enough to make ψ(y,r) to be a tiny value initially.
According to the principle of SMC, the following equation is satisfied when the system states reach the sliding surface

Combining equations (9), (10), and (14) gives


Equation (20) means that e1(t) = 0 ⇒ e2(t) = 0. Therefore, in order to demonstrate the stability of the system states in the sliding surface, the Lyapunov function can be defined as

Supposed that

Therefore, the error state e1(t) is asymptotic convergence as well as e2(t).
The control aim of traditional SMC is to design the control input such that the system state trajectory is forced to arrive the predefined sliding surface and converge to the expected value along the sliding surface. Since there are time delay and spatial lag caused by switches in PMSM servo system, the vibration is easily created. Therefore, the exponential approaching law is used in the derivation of SMC. The advantage of the exponential approaching law is that it has a fast system response when the system state is far away from the sliding surface and the convergence speed is approaching zero when the system state is gradually closed to sliding surface. This advantage can reduce the chattering caused by the SMC switching term. The exponential approaching law is defined as

where k1, k2 are positive constant.
Combined with the exponential approaching law (23) and differentiating (14) and using (10) we can get the NSMC controller as follows

where xd = [x1_ref(t)T, x2_ref(t)T]T, k1 > 0, k2 > ρ*.
Improved NSMC through adaptive parameter estimation and saturation function
The parameter perturbation and disturbance in the PMSM servo system is always unknown and it is difficult to accurately capture the upper bound of uncertainties. Normally in the traditional SMC system the switching gain is chosen to be a high value to satisfy the convergence of control system. Nevertheless, the high switching gain k2 in the control law (24) will lead to the large fluctuations and thus the system performance is significantly degraded especially for the motor control system with periodically pulse width modulation (PWM) generation mechanism. Therefore, the adaptive parameter estimation is designed to substitute the switching gain for the controller (24) as follows

As the equation (14) shows that the novel nonlinear sliding surface s(x,t) ∈R2 and it means that there are two sliding modes in the control system. Therefore, the adaptive parameter estimations are required respectively for each sliding mode. In order to derive the control law suitable for the matrix calculation,



where µ1, µ2 > 0 and µmin = min(µ1, µ2).
Given the system (10) with the controller as (25), the gain

According to the SMC stability principle,

The adaptive parameter estimation stability is verified by choosing the Lyapunov function as

where γ meets the criteria γµmin > 1.
Taking the derivation of the Lyapunov function (31) with control law (25) and (29) yields

where

Let

The

Therefore, the control law (25) can make the system state errors reaching the sliding surface and converge to zero.
Since |si(x,t)|, i = 1, 2 cannot be the absolute zero during the control process, the adaptive parameter estimation will increase infinitely. Therefore, a small value ε is set to modify the adaptive parameter estimation as follows

where
A saturation function as equation (34) with a certain threshold value is also used here to instead of sign function to weaken the chattering of the improved NSMC system

When |si(x,t)| ≥

Equivalent control diagram of the system when |si(x,t)|≤
Combining (14) and (25), the following equation is acquired

The transfer function between si(s) and ρdi(s), i = 1, 2 can be deduced from (35) as follows

According to the final value theorem, it yields

Since

Therefore, when the saturation function (34) is used in the control law, the state error of the system cannot be convergent to zero but a special range which is dependent on the threshold value
Design of DOB
In order to clearly describe the observer design, the regular system model with load disturbance for PMSM is given as

where
A nonlinear observer 27 can be applied here to estimate the load disturbance Tl. The load DOB for PMSM is constructed as




Associating with equation (39), neglecting the matched uncertainties which is already being controlled by improved NSMC and assumed that the deviation of load disturbance is bounded and
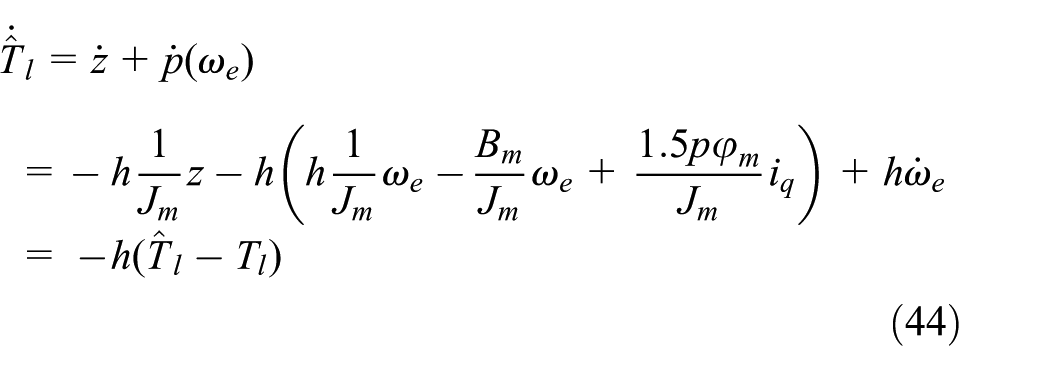
Therefore, the load disturbance estimation of
Improved NSMC-DOB design for PMSM servo system
According to equation (4), the new nonlinear sliding surface for both matched uncertainties and mismatched uncertainties is given as

Supposed that the load disturbance error is defined as

which satisfies the following bounded condition

According to the observer asymptotically convergence performance described in equation (44), the bounded condition (47) for load disturbance estimation error is reasonable.
Theorem 1
The control law which is named as improved NSMC-DOB is given as follows

The controller (48) enforces the trajectory of (39) to move from any initial condition to the sliding surface in finite time and keep on it. In the above control law, the upper bounded of

where
Proof
Let a Lyapunov function for the system in equation (39) be defined as

Taking the derivation of V3(t) and employing the control law (48) yields

With the prerequisite condition of (49), the Lyapunov stability condition (50) has been satisfied as

Therefore, under the condition of k1 > 0, h > 0 and the improved NSMC-DOB control law (48), the sliding surface (45) based on DOB is asymptotically converging to a boundary layer set
Simulation results
In this section, the simulation is implemented in MATLAB/Simulink to verify the robust performance of PMSM servo system based on field-oriented control and the system block diagram is shown in Figure 2. It consists of the coordinate transformations of PMSM such as Clarke and Park transform, space vector pulse width modulation (SVPWM), DOB, and the control algorithm of improved NSMC-DOB.
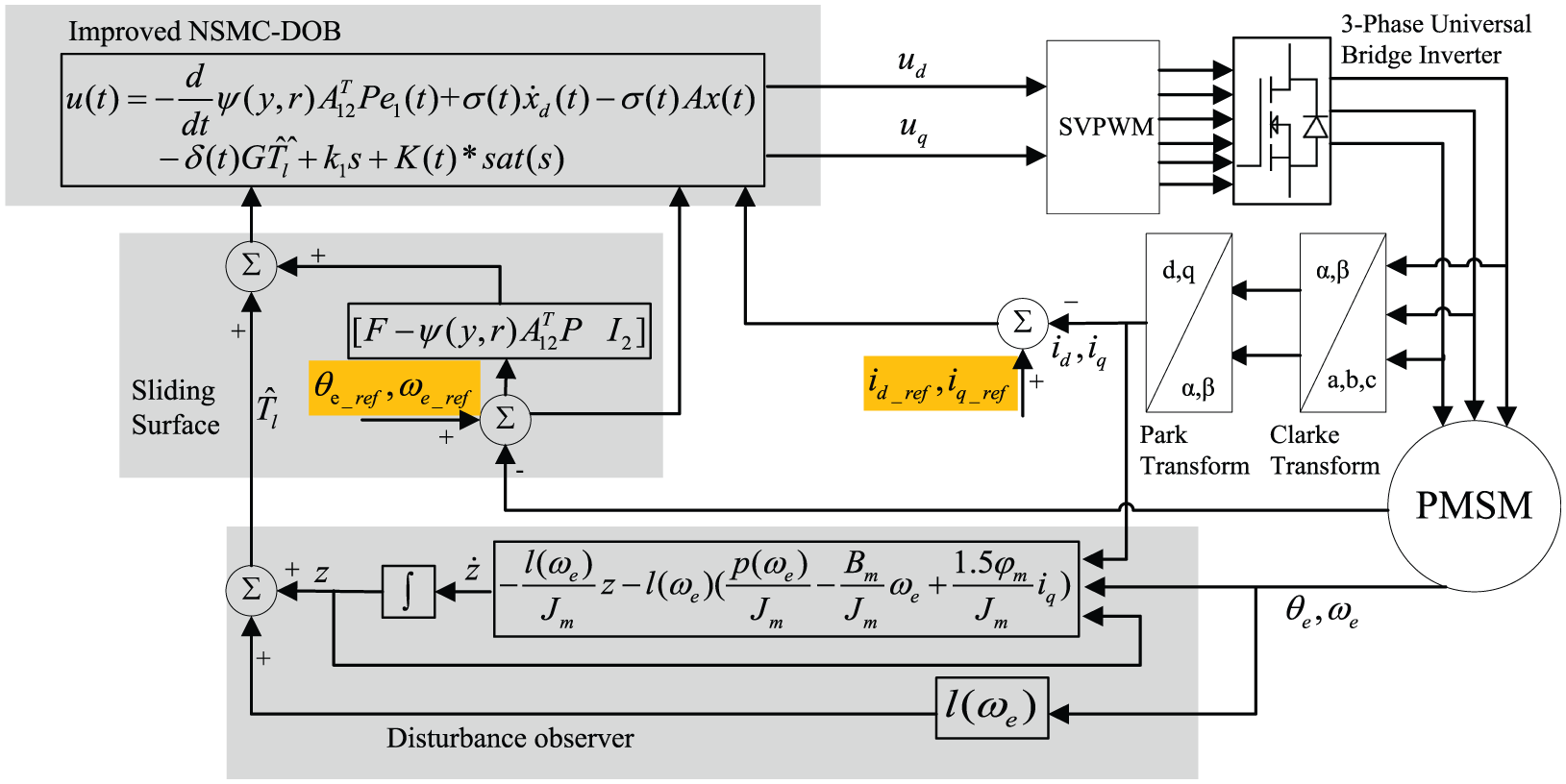
Structure of improved NSMC-DOB for PMSM servo system.
The simulation is organized as follows. Firstly, the step trajectory tracking in PMSM servo system is used to verify the advantages of improved NSMC-DOB algorithm. The outstanding transient response performance of novel NSMC algorithm in equation (25) is highlighted by comparing with LSS controllers. The improved NSMC with the chattering reduction by saturation switching function and the adaptive parameter estimation is also illustrated. The insufficient in disposing the unmatched uncertainties of load disturbance in improved NSMC is described afterward. After that, the availability of DOB is verified by estimating the load disturbance. Finally, the improved NSMC-DOB is simulated for PMSM servo system to verify the proposed method effectively with the load disturbance rejection. Meanwhile, the sinusoidal and triangle trajectory tracking for PMSM servo system are simulated. This is used to highlight that the proposed improved NSMC-DOB algorithm can also decrease the tracking error for the continuous variable trajectory of PMSM mechanical angle.
The nominal parameters of PMSM are listed as follows

In order to simulate the dynamical parameter perturbation in the process of PMSM running due to the motor temperature and magnetic field variation and verify the effectiveness of the proposed algorithm, the library file powerlib.slx in MATLAB/Simulink for PMSM is modified to add the disturbance to main parameter Rs and Ls. A zero-mean-value random noise with Gaussian distribution is added to Rs and Ls in this article.
Step trajectory tracking simulation
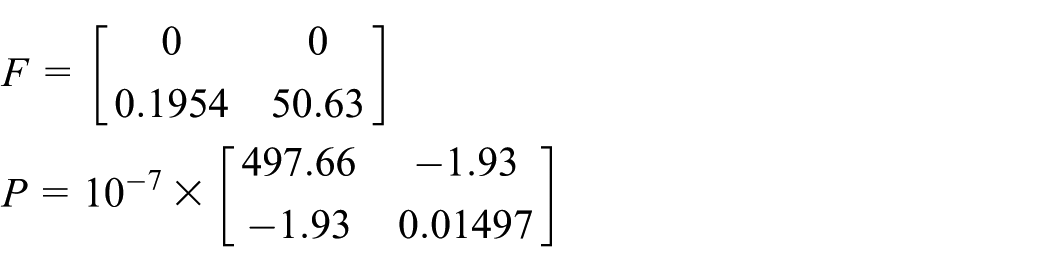
In this section, the PMSM servo system is considered without load disturbance first to verify the performance of improved NSMC algorithm. According to the principle of NSMC, the fast response without overshoot of the control system is acquired by the variation of system damping ratio which is considered to change gradually from ξ1 = 0.5 to ξ2 = 1 in this article. The improved NSMC design parameters are as follows

According to the pole placement principle and the Lyapunov equation (17), the following parameter is acquired as
For the comparison purpose to prove the performance of NSMC in PMSM servo system, the SMC with LSSs are designed based on the fixed damping ratio ξ and settling time ts. Supposed that all the LSSs have the same dynamical resonance frequency ωn and the following equation is used to choose the constant damping ratio and settling time

The following LSSs are used in this article:
LSS-1 with ξ = 0.5 and ts = 0.195 s;
LSS-2 with ξ = 0.7 and ts = 0.140 s;
LSS-3 with ξ = 0.9 and ts = 0.110 s.
The control law for LSS system can be acquired from (25) under the circumstances of ψ(y,r) = 0. The position reference is given as a step input θr_ref(t) = 5 (rad) with soft-start mode and the maximum speed limitation.
Figure 3 is the time response of the motor rotor angle with different sliding surfaces and the numerical comparison for the system transient performance with overshoot and rising time is given in Table 1. The rising time is defined as the time required for the response to rise from 10% to 90% of final value. From Figure 3 and Table 1, it can be seen that the trajectory tracking of step position by NSMC can acquire the best performance with fast rising time and non-overshoot as well as high accuracy.

Time response of the motor rotor angle with different sliding surfaces.
Performance parameter comparison of system response in different sliding surfaces.

LSS: linear sliding surface; NSMC: nonlinear sliding mode control.
The adaptive parameter estimation used for two switching gains in improved NSMC control law is shown in Figure 4. Actually, the adaptive parameter estimation not only eliminates the necessity of the perturbation bound but also improves the system stability by estimating changeable uncertainties in the system. Figures 5 and 6 clearly show that the chattering in the control input and sliding surface is well suppressed by changing the switching function from sign function to saturation function.

Adaptive parameter estimation for switching gains.

Control input of chattering reduction comparison between NSMC and improved NSMC.
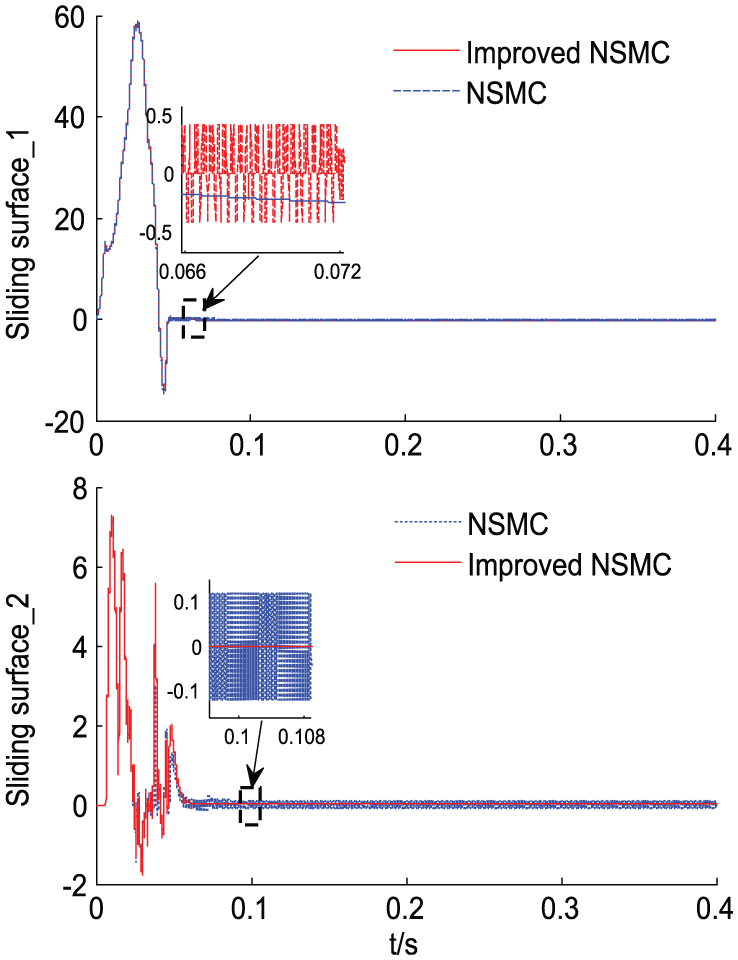
Sliding surfaces comparison between NSMC and improved NSMC.
In order to depict the effect of improved NSMC-DOB robustness to the mismatched uncertainties, the external load disturbance Tl = 2.5 N m is exerted on the PMSM servo system at t = 0.2 s. Figure 7(a) shows the simulation results of the trajectory with step signal θr_ref(t) = 5 (rad), respectively, by improved NSMC and improved NSMC-DOB and the tracking error is illustrated in Figure 7(b). It can be clearly seen that the position error is reduced by the improved NSMC-DOB controller. For DOB equation (35), the parameter h is chosen as h = 1. Figure 8 is the comparison of system state iq, id and sliding surface of improved NSMC and improved NSMC-DOB in the presence of load disturbance. The sliding surface_2 is the current of id according to equation (45) which is shown in Figure 8(c).

Comparison between improved NSMC and improved NSMC-DOB in the presence of load disturbance: (a) time response of motor rotor angle and (b) time response error of motor rotor angle.
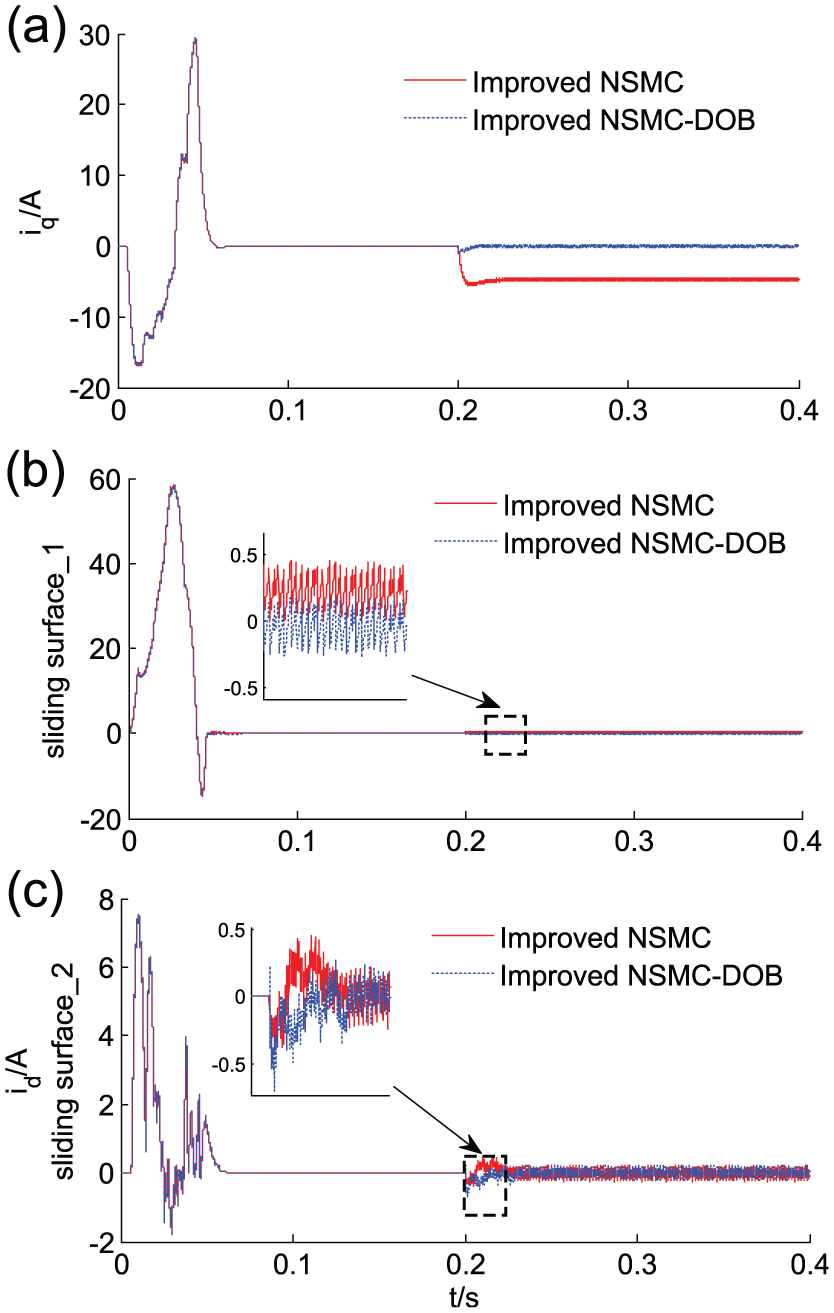
Comparison between improved NSMC and improved NSMC-DOB in the presence of load disturbance torque: (a) comparison of current iq, (b) comparison of sliding surface_1 and (c) comparison of current id which is the sliding surface_2 as well.
From Figures 7 and 8, it can be seen that the improved NSMC fails to drive the motor position to the expected value in the presence of load disturbance while the proposed improved NSMC-DOB can suppress the mismatched load disturbance and have good tracking accuracy. The load disturbance is observed in Figure 9 and it can be seen that the DOB can estimate the load disturbance accurately.
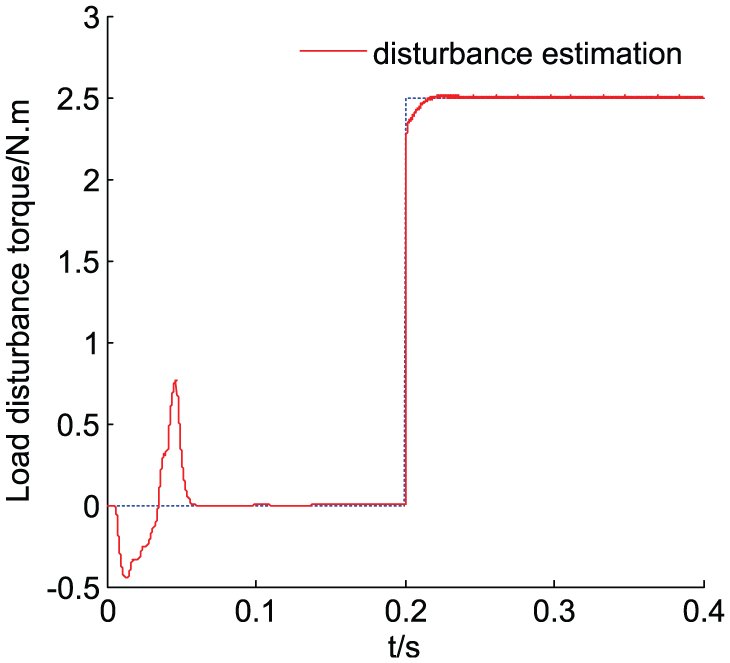
Load disturbance estimation.
Continuous variable trajectory tracking simulation
The sinusoidal and triangle trajectory is used in this section as the continuous variable trajectory. Figures 10(a) and 11(a), respectively, show the improved NSMC-DOB deducing the better response performance in dynamic PMSM trajectory tracking control for desired sinusoidal and triangle trajectory with the disturbance load torque Tl = 2.5 N m exerted at t = 0.6 s compared with improved NSMC control. From Figures 10(b) and 11(b), it can be clearly seen that the improved NSMC-DOB algorithm has a better trajectory tracking accuracy than improved NSMC after the load disturbance is exerted.

Dynamic response for sinusoidal trajectory: (a) time response of motor angle and (b) time response error of motor angle.

Dynamic response for triangle trajectory: (a) time response of motor angle and (b) time response error of motor angle.
Conclusion
In this article, an improved NSMC-DOB for PMSM servo system has been proposed. First, the nonlinear sliding surface is introduced in the SMC design. Then the adaptive parameter estimation has been designed for the switching gain to abolish the analysis necessity of the changeable uncertainties in the sliding switching part. Meanwhile, the sign switching term is replaced with a saturation function to acquire a low chattering performance under the permissible system errors. A DOB has been designed and combined with improved NSMC to solve the problem of its unrobustness to the mismatched disturbance. The simulation results shows that the proposed improved NSMC-DOB applied in PMSM servo system not only acquires the better transient response but also realizes the robustness to the system parameter uncertainties and perturbations including the matched and mismatched disturbance. The robustness to system mismatched disturbance can increase the positioning accuracy to some extent which is beneficial to amount of servo systems.
Footnotes
Appendix 1
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is funded by the CASHIPS Director’s Funds (Grant No. YZJJ201521) and Changzhou Sci & Tech Program (Grant No. CE20140025).