
Abstract
A disturbance observer-based control scheme is proposed in this paper to deal with the attitude stabilization problems of spacecraft subjected to external disturbances, parameter uncertainties, and input nonlinearities. Particularly, the proposed approach addresses the dead-zone issue, a non-smooth nonlinearity affiliated with control input that significantly increases controller design difficulties. A novel nonlinear disturbance observer (NDO) is developed, which relaxes the strong assumption in conventional NDO design that disturbances should be constants or varying with slow rates. After that, a special integral sliding mode controller (ISMC) is combined with the NDO to achieve asymptotic convergence of system states. Simulations are performed in the presence of time-varying disturbances, parameter uncertainties, and dead-zone nonlinearity to justify the effectiveness of the proposed control scheme.
Introduction
The attitude stabilization problems have gained extensive attention over the years, due to their significance in space mission and widespread applications. Many practical issues, such as external disturbances, parameter modeling uncertainties, and input nonlinearities, must be considered in attitude controller design. To this end, many research results have been proposed to solve attitude stabilization problems using different control techniques, such as back-stepping control (Kristiansen et al., 2009), passivity-based control (Gui and Vukovich, 2016; Ulrich et al., 2016), and adaptive control (Reza Alipour et al., 2018; Wen et al., 2018). In particular, sliding mode control (SMC) (Cui et al., 2017) techniques have been used extensively due to their multiple advantages, including inherent robustness and easy-to-implement structure (Zhang and Zheng, 2014; Zhang et al., 2014).
SMC is known for its robustness against system uncertainties and external disturbances. It uses discontinuous feedback control action to force the system trajectories to reach the pre-designed sliding manifolds. However, discontinuity can lead to the chattering problem, which is undesirable from a practical engineering viewpoint. Though this can be avoided by replacing the discontinuous term in controller with the sigmoid approximation function (Saghafinia et al., 2015), such approximation may result in deterioration of controller performance. Also, SMC can not attenuate mismatched uncertainties and disturbances unless combined with other robust techniques (Shtessel et al., 2014). Recently, integral sliding mode controller (ISMC) method has attracted wide research interest due to its ability to mitigate the chattering issue (Liang et al., 2012; Xu et al., 2014; Zhang et al., 2016). This technique provides an extra degree of freedom to devise an appropriate control law for the system (Comanescu et al., 2008). A first-order ISMC was proposed for attitude tracking problems in Pukdeboon and Zinober (2012). A second-order ISMC framework was developed in Tiwari et al. (2015).
External disturbances and parameter uncertainties are common and inevitable issues that can hinder the successful completion of space missions. For this reason, the spacecraft attitude control law must be able to handle external disturbance and parameter uncertainties (Lu et al., 2013; Wu et al., 2011). High-gain switching functions can be used to overcome the effect of system parameter uncertainties but may result in input chattering. An adaptive SMC was employed for attitude tacking control problems subjected to external disturbances in Reza Alipour et al. (2018). Disturbance observer-based control methods have been proposed in many studies (Chen and Ge, 2015; Ginoya et al., 2014; Hu et al., 2014; Pukdeboon and Siricharuanun, 2014; Sofyalı et al., 2018; Zhang et al., 2018), in which disturbance estimates are incorporated with control laws to reject the disturbances directly. Such control schemes can also mitigate input chattering and approximately compensate parameter uncertainties, therefore improving overall control performance. The disturbance and parameter vibrations in flexible spacecraft were compensated using a disturbance observer in Liu et al. (2018). A disturbance observer was designed and combined with the controller for control allocation improvement in Qiao et al. (2018). A composite control law that employs extended state observer (ESO) and an additive controller was developed to remove external disturbance in Chen et al. (2018). Another ESO-based control laws were presented in Ye et al. (2017) and Li et al. (2016) for formation flying of spacecraft. Back-stepping was combined with the observer to formulate a stabilization control scheme in Sun and Zheng (2017). An iterative learning-based observer was combined with fault-tolerant control for spacecraft stabilization control in Hu et al. (2018).
Input nonlinearity is another important practical issue that originates from the physical constraints of control actuators. For example, the dead-zone nonlinearity is encountered when reaction wheels are used as actuators in spacecraft attitude control (Hu et al., 2008). However, most of the control schemes ignore the input nonlinearity such as dead-zone and saturation. Such design may lead to system performance degradation or sometimes even destabilization, causing mission failure (Pang and Yang, 2013). The input nonlinearity, along with the external disturbances and parameter uncertainties, can significantly increase the difficulty of control system design. Though some controllers had been proposed in recent years (Chen et al., 2018; Lu et al., 2013) to deal with attitude control problems subject to input saturation, those results are difficult to be extended to handle dead-zone problems, where the actual input is a nonlinear function of friction. The attitude stabilization problem for an uncertain system with dead-zone was solved using SMC in Hu et al. (2008), but strict upper bounds on disturbances were required. Variable structure control was combined with the adaptive control to deal with the input dead-zone in Hu (2007) and Yan et al. (2005). However, over-adaptation and parameter drift are serious concerns in those studies.
The difficulty of attitude control problems with dead zones stems from the fact that the factors affecting dead zones and their parameters are partially or totally unknown. The presence of dead zones severely limits the control system performance and influences the dynamic characteristics of closed-loop system. Therefore, control techniques that are robust to the dead zone, in addition to external disturbance and system uncertainty, are of vital importance for spacecraft attitude control. In this paper, a novel observer-based attitude stabilization control method is developed to address this challenging problem. A new nonlinear disturbance observer (NDO) is designed to estimate the system’s combined disturbance, composed of time-vary external disturbances, system uncertainties, and dead zone. The key features of the proposed NDO include finite-time convergence and relaxation of strong assumptions related to the bounds of uncertainties. These features enable the proposed NDO to estimate various classes of disturbances. After that, the NDO is integrated with ISMC to achieve attitude stabilization. Lyapunov’s stability theory is employed to analyze the convergence of estimation error and the closed-loop system’s stability. The developed NDO-ISMC structure ensures asymptotic convergence of system states while reducing the control input chattering significantly. Comparative simulations are performed to justify presented theoretical results and show the control performance of our controller.
The remainder of this paper is arranged as follows. First, Section II describes the system dynamics. After that, the control problem is formulated in Section III. In Section IV, our NDO is designed to obtain the combined disturbance estimate. The composite control law is formulated using ISMC and NDO. Simulation results with brief discussions are presented in section IV. Finally, some conclusive remarks are given in Section VI.
Spacecraft attitude model
The attitude model of a rigid-body spacecraft is provided in this section. The case of a fully-actuated system is considered here.
Attitude kinematics and dynamics
The quaternion representation-based model is used for attitude control of spacecraft in this work. Assume an Euler angle

where

The rigid-body spacecraft attitude kinematics are given as Hu (2007)


where

In addition, the rigid-body dynamics are given as Hu (2007)

where parameter
Problem formulation
In this section, the dead-zone model used in this paper is presented, and a transformed attitude model is deduced for a rigid-body spacecraft.
Dead zone
The dead zone is one of the most consequential nonlinearities encountered in spacecraft actuators and can severely limit the system performance. It is usually time-varying with unknown parameters. We describe the dead zone for an output vector
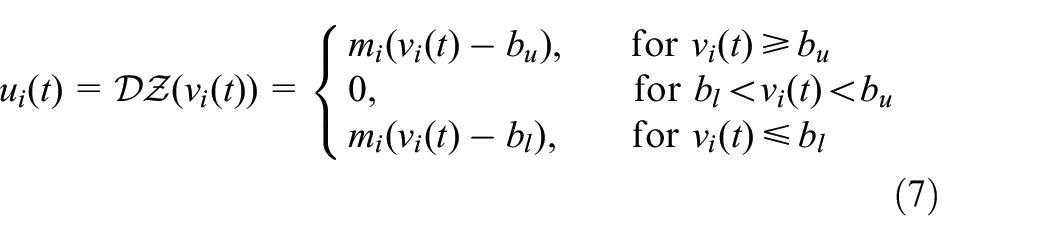
where
The expression in equation (7) can be reorganized as

and here

Then, we use the following equation to denote the vector-form dead-zone projection, which is the direct extension of equation (8)

where
(1) The dead-zone output
(2) The parameters
(3) The dead-zone parameter are bounded by unknown constants, that is,
From the key features

where the unknown upper bound

System transformation
In this section, input nonlinearities are introduced in system dynamics, and transformations are performed based on Assumption 1, to facilitate the NDO design. Employing Assumption 1 and equation (6), we have



Using equation (6) with algebraic simplification results in

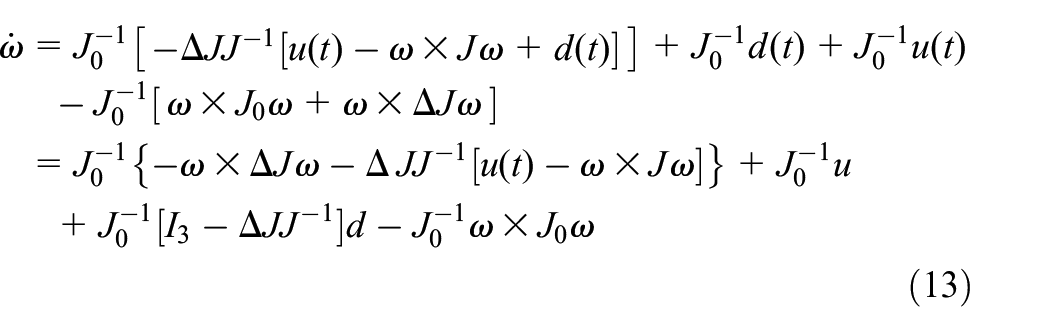
A compact form of

where
Introducing the dead-zone expression in equation (10) into equation (14), one has

By defining

Problem statement
This paper aims to develop a stabilization controller for the spacecraft attitude control problem subjected to dead zone, parameter uncertainties and external disturbances, formalized by

Before designing our control strategy, the following definition and lemma regarding finite-time convergence are presented as preliminary results.

where the function

Then, the system is FT stable if

Disturbance observer and controller design
In this section, a NDO is developed along with an ISMC law to realize the aforementioned attitude control objective. Rigorous stability analysis of the proposed observer and control law is provided.
Disturbance observer design
We aim to design a NDO to estimate the unknown combined disturbance
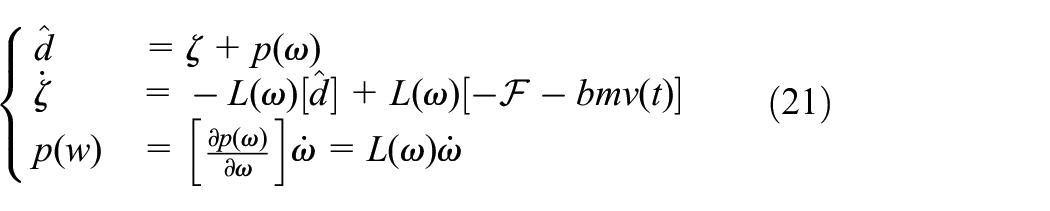
where

Using the observer design in equation (21), we have
Consider the Lyapunov function
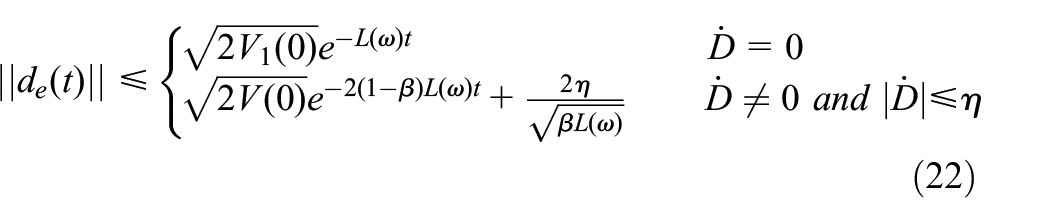
Further analysis is divided into the subsequent two cases.

The solution to equation (26) is

where the constant

By equation (28), one can further show that


From equation (26) and (28), it is evident that the observer estimation error converges to zero, that is,
ISMC controller design
In this section, an ISMC scheme is developed and integrated with the NDO. The sliding surface to formulate ISMC law is defined as follows

where

and here
Taking derivative of the sliding surface, one has
The proposed control law has the following form



where

where

Then, the following theorem summarizes the development of our control law and the closed-loop system stability.


Similar to Theorem 1, we split the analysis into the following two cases.
It should be noted that the fact:
Equations (41) and (42) are satisfied for all
Simulation results and discussion
In this section, the performance of the developed NDO-ISMC control scheme is tested by numerical simulations. Comparative simulation results, along with detailed discussions, are presented to demonstrate the effectiveness of our method.
The attitude model of a rigid-body spacecraft is adapt from Chen et al. (2018). The nominal value of the inertia matrix and the time-varying uncertain inertia of spacecraft are given as follows


Furthermore, the external disturbance used in simulations is selected as

The initial value of attitude quaternion is opted as
The constant parameters used to simulate the dead-zone nonlinearity, the NDO, and the proposed NDO-ISMC law are given in Table 1. Specifically, the parameters
Control parameters for numerical simulations.
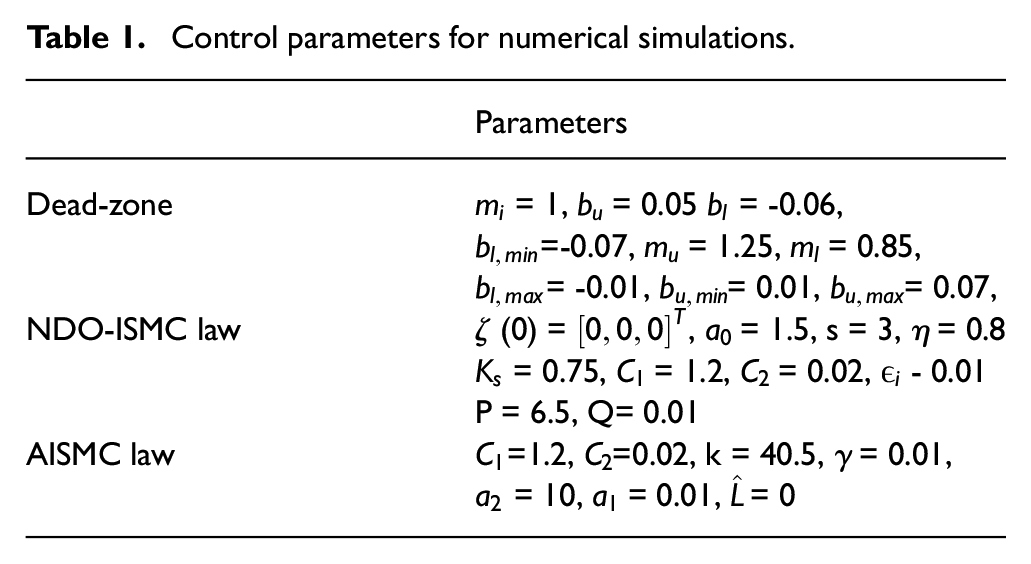
Proper selection of the NDO design parameters enables the convergence of estimates to actual disturbance. In this work,

where the constant parameters
Spacecraft stabilization controller using an adaptive ISMC (AISMC) subjected to dead zone, external disturbance, and parameter uncertainties is simulated for comparison. The AISMC follows

where parameters

the parameter values of the constants
The simulation results of the proposed NDO are depicted in Figure 1. One can observe that the disturbance estimate converges to the actual value after 80 sec. The effect of lumped disturbance is reduced by using NDO through feed-forward compensation. The convergence of disturbance estimation error with time is shown in Figure 2.
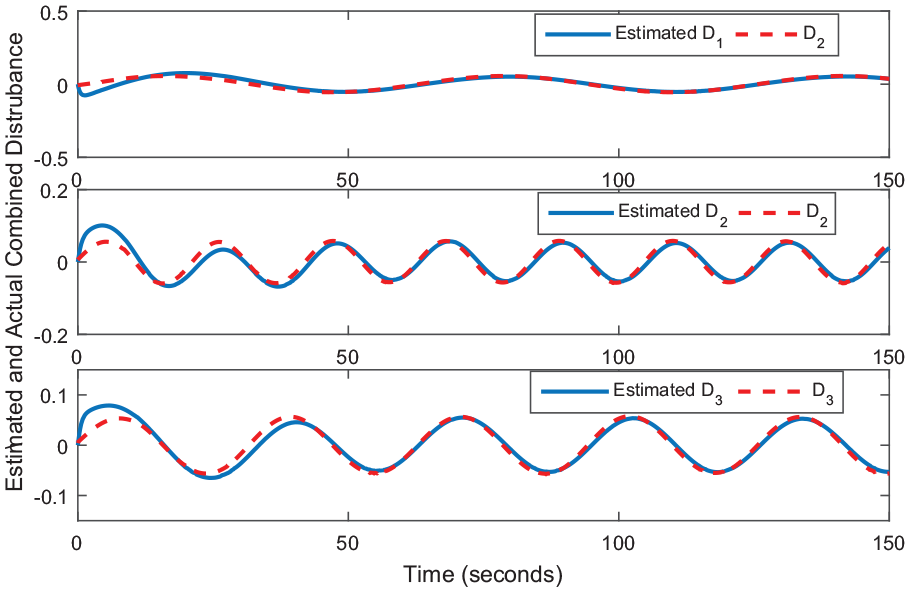
Estimates and estimation errors of the combined disturbance.
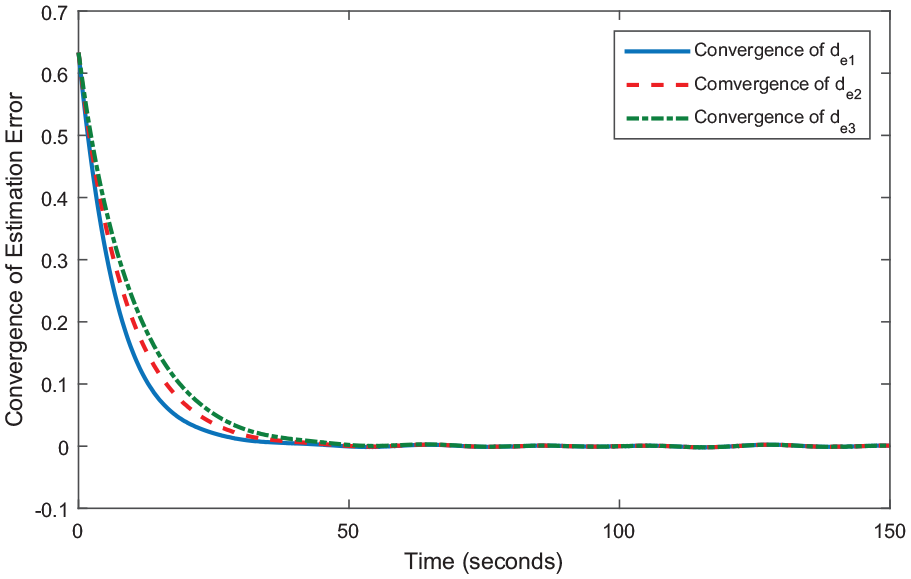
Convergence property of disturbance estimation error.
Spacecraft attitude orientation is given in Figure 3. Note that the attitude quaternion coincides to the equilibrium point in 100 s. It can be observed that attitude quaternion reaches the equilibrium position in a similar fashion under NDO-ISMC and AISMC. The trajectories for the angular velocities of the rigid-body spacecraft are given in Figure 4, and they converge in 100 s. Angular velocities are more smooth for the proposed controller during steady-state operations as shown in Figure 4(a) and Figure 4(b). Additionally, it is evident that the angular velocities have less overshoot under NDO-ISMC when compared with AISMC. The sliding surfaces for both the controllers are shown in Figure 5. It is clear from the figure that there is no reaching phase, and system states are on the sliding surface from the start under our NDO-ISMC. However, the sliding surface for AISMC is not smooth and diverges from zero occasionally, which can result in controller performance degradation. A possible cause of the divergence of the sliding surface from the equilibrium point is the presence of non-smooth input uncertainty in the system.
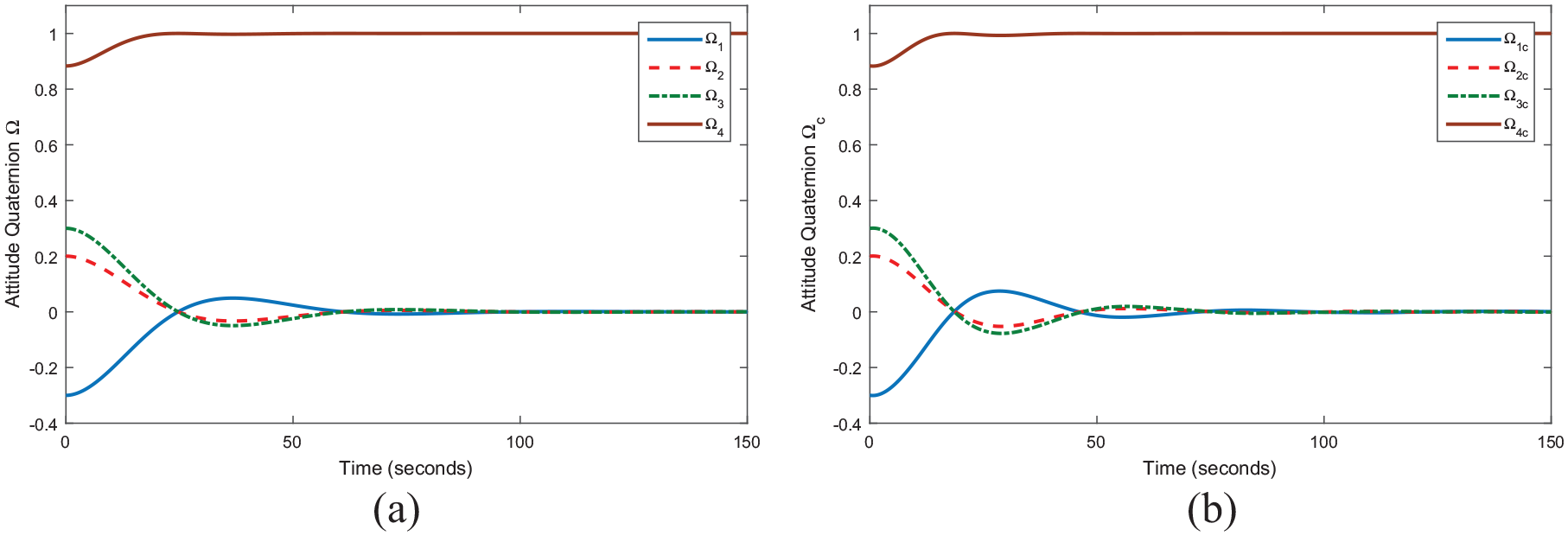
Attitude quaternion error response: (a) Proposed NDO-ISMC law; (b) AISMC law.
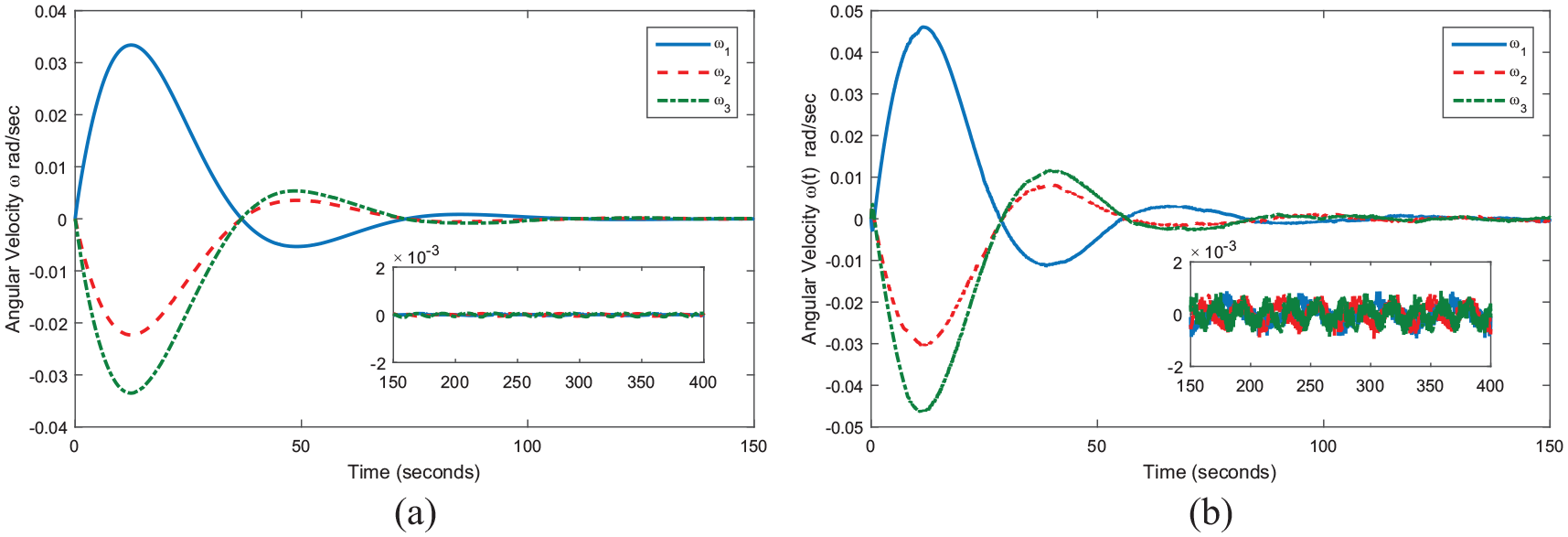
Angular velocity evolution: (a) Proposed NDO-ISMC law; (b) AISMC law.
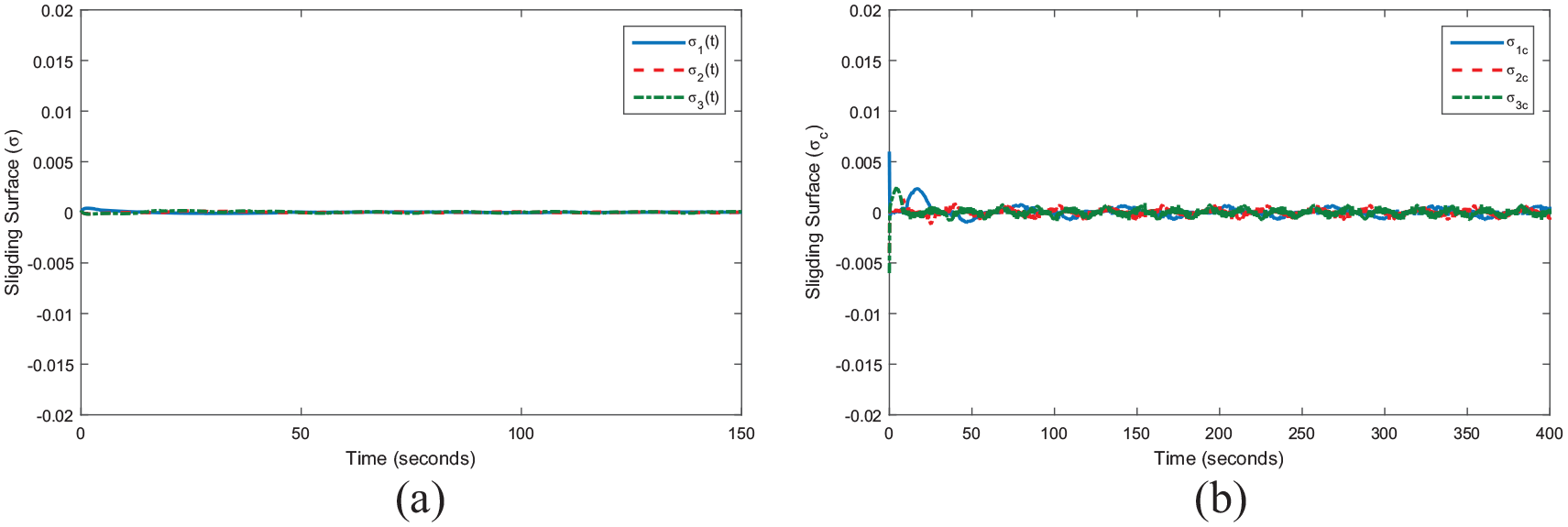
Sliding surface: (a) NDO-based ISMC law; (b) ASMC law.
The evolution of control input to stabilize the spacecraft system is presented in Figure 6. It is apparent that the control input of NDO-ISMC is smooth and chattering free, in-spite of the presence of dead-zone. However, the control input under AISMC law encounters the chattering problem. Energy consumption for the control laws is shown in Figure 7. The energy for the given control law is calculated using
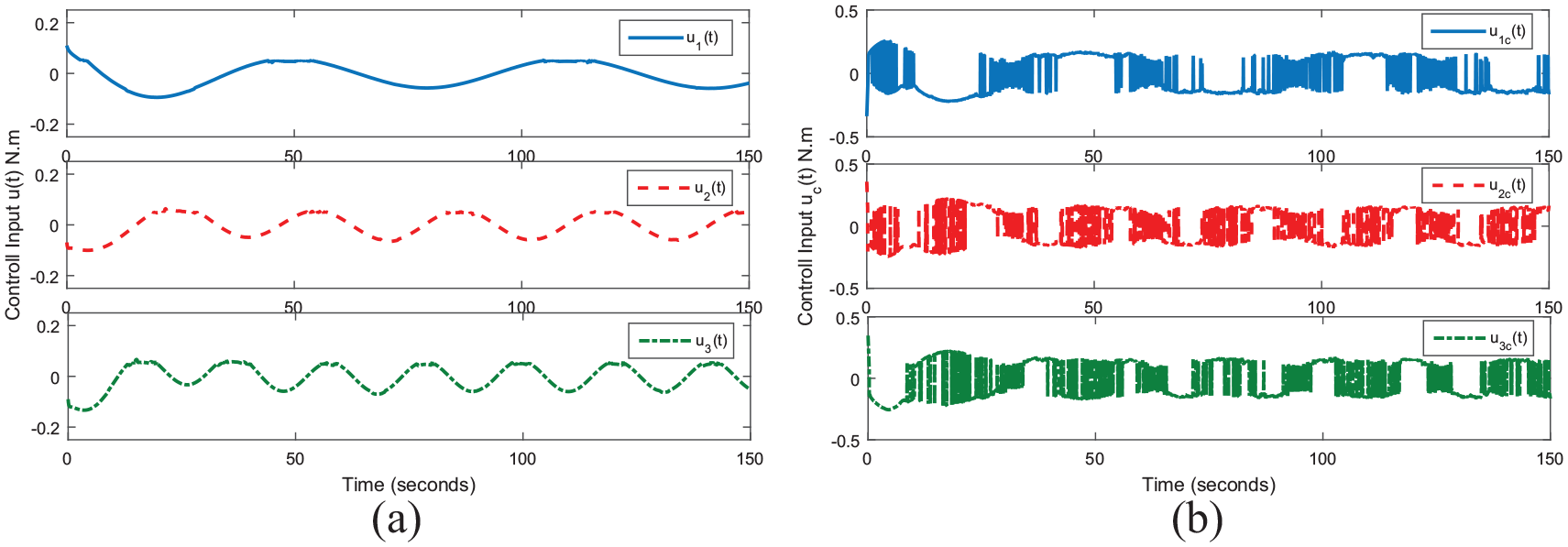
Control input torque: (a) NDO-based ISMC law; (b) AISMC law.
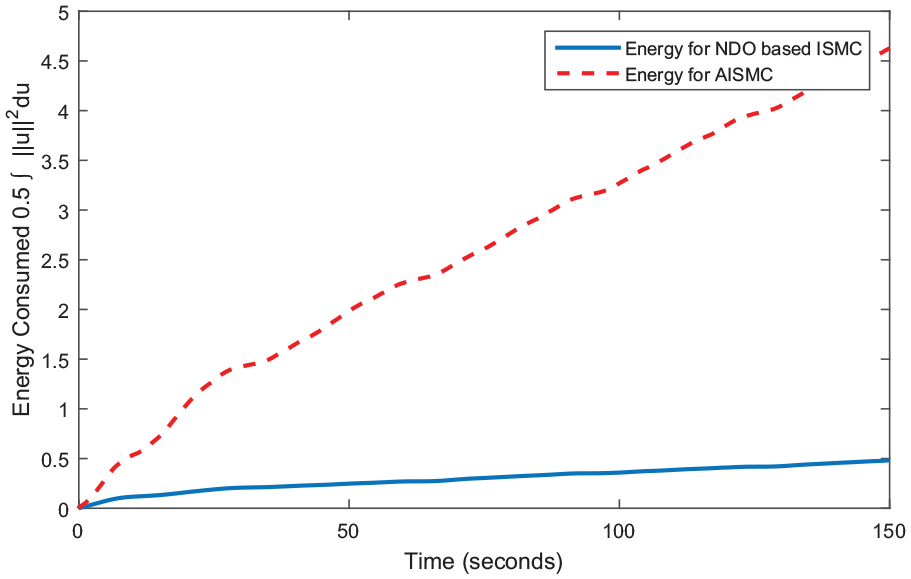
Energy consumption for proposed controller and AISMC law.
Conclusion
A composite control scheme for attitude stabilization of rigid-body spacecraft subjected to external disturbances, parameter uncertainties, and input nonlinearity has been developed. A new NDO was designed to estimate the combined disturbance of the closed-system. The condition for convergence of the designed NDO was rigorously established. Notably, the changing rate of the combined disturbance was not required to be zero or almost zero. Hence, the proposed NDO is able to handle a wide range of disturbances. Simulation results showed that the proposed NDO-ISMC method efficiently achieved attitude control objective in the presence of non-smooth dead zone, external disturbances, and parameter uncertainties.