
Abstract
To improve the condition of air and eliminate exhaust gas pollution, this article proposes a compressed air power system. Instead of an internal combustion engine, the automobile is equipped with a compressed air engine, which transforms the energy of compressed air into mechanical motion energy. A prototype was built, and the compressed air engine was tested on an experimental platform. The output torque and energy efficiency were obtained from experimental results. When the supply pressure was set at 2 MPa and the speed was 420 r min−1, the output torque, the output power, and the energy efficiency were 56 N m, 1.93 kW, and 25%, respectively. To improve the efficiency of the system, a fuzzy logic speed control strategy is proposed and simulated. The experimental study verified that the theoretical evaluation of the system was reasonable, and this research can be referred to as the design and control of air-powered vehicles.
Introduction
Air pollution, especially by atmospheric fine particles, has been a severe problem for many years. The burning of fossil fuels through internal combustion engines in transportation vehicles has been a major source of this kind of air pollution.1,2 According to relevant research reports, atmospheric fine particles (particulate matter 2.5 (PM2.5)) produced by automobiles are responsible for >30% of the air pollutants in Beijing. 3 The problem will continue to worsen as the number of automobiles increases. This environmental threat has made it imperative to develop a viable alternative to fossil fuels for transportation vehicles. This work presents an engine using compressed air as a possible solution.4,5
Instead of an internal combustion engine, the automobile is equipped with a compressed air engine (CAE), which transforms the energy of compressed air into mechanical motion energy. Compared with other eco-automobiles, this automobile promises high efficiency, high maturity, and completely zero emissions. Therefore, this prospect has drawn the attention of scholars. 6
David Huang and Tzeng 7 and David Huang et al. 8 proposed an innovative concept—a hybrid pneumatic power system (HPPS) ensures that the internal combustion operates optimally and recycles the exhaust energy, thereby increasing the vehicle’s efficiency. Shaw et al. analyzed a compressed air–pressurized hydraulic oil hybrid pneumatic system. In their system, the energy was transformed to mechanical energy by a hydraulic motor to improve the efficiency of using air power. 9 It is obvious that compressed air provides auxiliary energy for most hydraulic systems. The blending with bio-diesel 10 augments the naturally available fossil fuel, but this fuel still remains a limited resource and does not meet the zero pollution vehicle (ZPV) requirements. With the development of the technology of compressed air energy storage, the utilization of compressed air in transport vehicles and other utilities is an attractive option, especially in view of its potential as a ZPV alternative.
There are many types of CAEs that can be applied to a transportation vehicle. Various types, such as vane, rotary piston, and piston, are being constantly evaluated across the world. Singh and Singh designed a vane-type air turbine. To maximize shaft work, different aspects of improving efficiency were proposed. 11 Singh and Singh 4 also optimized the multi-vane air engine injection method and the vane angles to improve performance. Shen and Hwang presented an idea of using compressed air as the power source for motorcycles. A fuzzy logic speed controller was applied in a prototype. 12 Engineair is a company focused on the development of air motor technology based on a unique rotary piston concept. Commercial products had already been designed. 13 Compared with other air-powered engines, the piston-type CAE promises high compressed air pressure, high efficiency, and high maturity and, therefore, draws the attention of scholars. Huang et al. 14 modified a CAE with a 100-cm3 internal combustion engine and investigated its performance experimentally. Motor Development International (MDI) holds international patents for piston-type CAEs. 15 Chen et al. 16 proposed a newly electro-pneumatic valve for the compressed air-powered engine. Although many have proposed that the output power and efficiency are affected by speed during operation, relatively few studies have reported speed characteristics and a control strategy for piston-type CAEs while working. This study focuses on the speed characteristics and speed control during operation.
This article presents a prototype using piston-type CAEs with the benefit of eliminating the release of pollutant exhaust gases to the atmosphere. The efficiency of this CAE is analyzed through experiment data. Reasonable speed can be obtained by efficiency analysis. A fuzzy logic speed controller is also developed to maintain reasonable speed. The remaining sections are organized as follows: an introduction to CAEs is described in section “Introduction of the air-powered vehicle system,” a theoretical analysis is carried out in section “Theoretical analysis,” experimental results are shown and analyzed in section “Simulation study and experimental verification,” a fuzzy logic speed controller is presented in section “Fuzzy control design,” and the conclusions are stated in section “Conclusion.”
Introduction of the air-powered vehicle system
The structure of a piston-type CAE is shown in Figure 1, and the main parts are labeled. To obtain a fast response in terms of valve moment, the input flow of the CAE is controlled by a cam.

Piston-type CAE.
In a suction power stroke, the compressed air flows into the cylinder through an intake valve and the piston are driven downward. The linear movement of the piston is converted to rotary motion by a crank-connecting rod mechanism. The intake angle and phases are decided by the cam profile. When the intake valve closes after a specific crank angle, the compressed air inside the cylinder expands and pushes the piston down. This process causes the exhaust valve to close.
When the piston is near the bottom dead center (BDC), the exhaust valve opens so that the air, with residual pressure, discharges under the impetus of the piston. The piston is then driven by the flywheel energy and finally arrives at the top dead center (TDC).
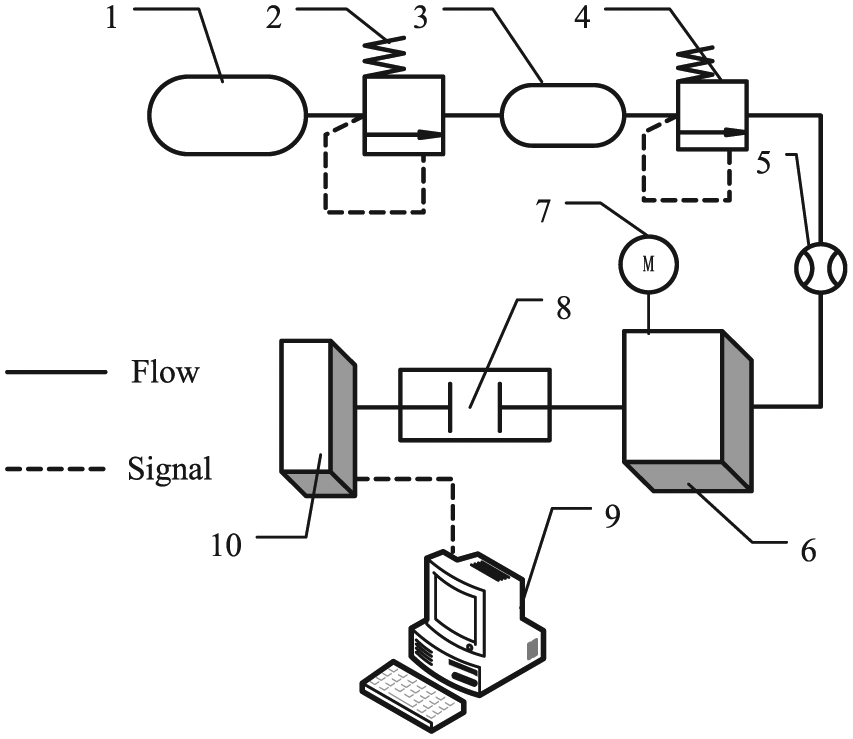
The air-powered vehicle (APV) system, whose schematic diagram is shown in Figure 2, consists of a CAE, a carbon-fiber tank, an electronic proportional directional control valve (SMC ITV1050), an air control valve (TESCOM), two regulators (TESCOM), a buffer tank, a pressure sensor, a speed sensor, an accelerator pedal, and an electrical control unit. The pressure entering into the CAE will be determined by the air control valve position, which is controlled by the ITV1050 exhaust pressure. The ITV1050 exhaust pressure is determined by an externally applied electric current, denoted by I. When I is equal to 4 mA, the valve closes. When I is equal to 20 mA, the valve is fully open. The electric current is controlled by an electrical control unit. The major elements of the APV system and their functions are listed in Table 1.

Schematic diagram of the power system of the APV.
APV equipment.
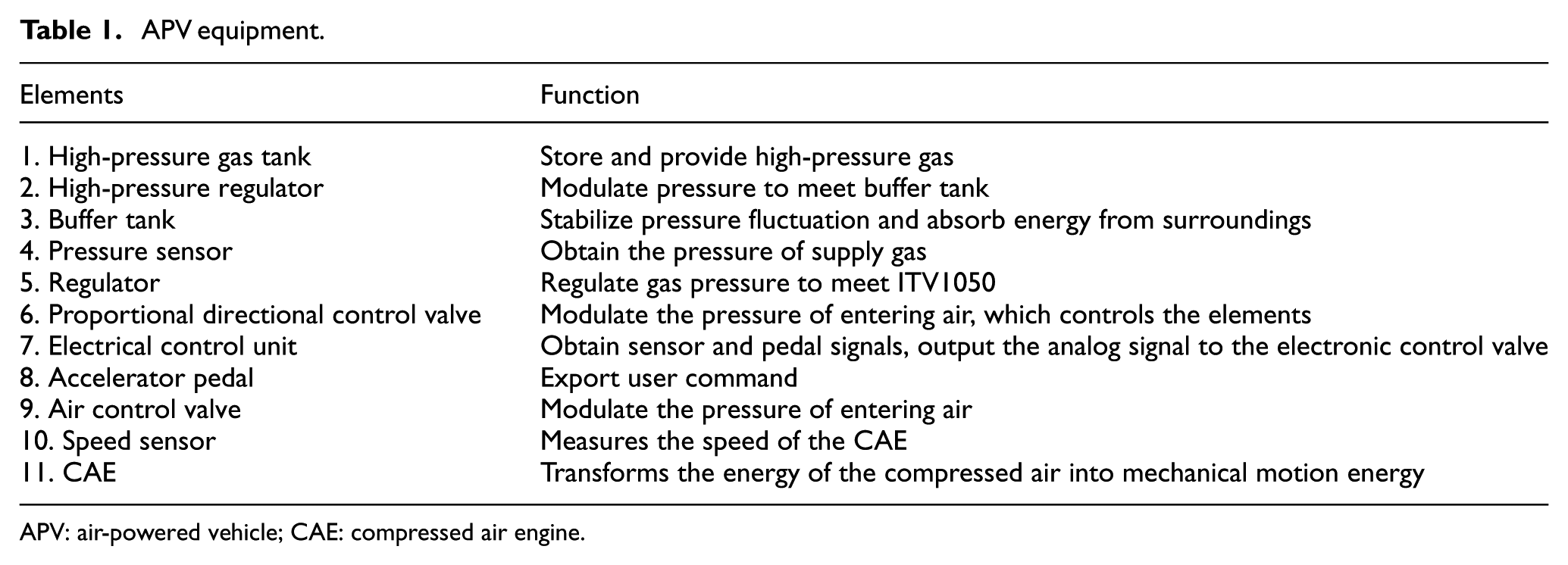
APV: air-powered vehicle; CAE: compressed air engine.
Theoretical analysis
System simplification
To facilitate this research, the following necessary assumptions are made:
Each point in the interconnecting conduit has some pressure. This requires ignoring the pressure loss along the pipe.
There is no leakage during the working cycle.
The volume of the pipe is neglected.
The regulator and valve are considered a throttle orifice.
The APV system can be simplified using these assumptions, and a schematic diagram is shown in Figure 3.
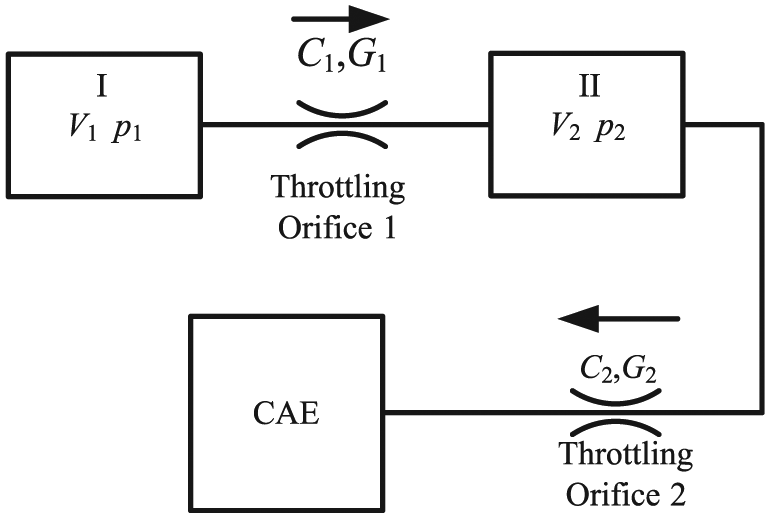
Simplified APV system.
The arrow indicates the direction of flow. Volume I is a high-pressure tank chamber. Volume II is a buffer tank chamber. Throttling orifice 1 represents the high-pressure regulator. Throttling orifice 2 represents elements 5, 6, and 9, which are shown in Figure 2.
Mathematical modeling of the APV system
The APV system includes three major parts: a gas tank, a pressure regulator, and a CAE. Therefore, the system model required by the quantitative simulation includes all three major parts and is described in the following.
Gas tank
State equation
The purpose of the gas tank is to provide energy for running the CAE. The air pressure in the tank was set at 30 MPa to obtain a high power density and enough energy. According to the literature, 17 the gas can be approximated as an ideal gas if the pressure p < 0.5pc or the temperature T > 5Tc. From the literature, 18 the critical pressure (pc) and temperature (Tc) of air are 3.77 MPa and 132.42 K, respectively. Many equations such as the Soave–Redlich–Kwong(S-R-K) 19 and the Peng–Robinson (P-R) 20 have been proposed about real gas. Here, the real gas van der Waals state equation 21 was applied, as shown in equation (1)


where pi is the pressure of the air in the gas tank (Pa), Vi is the volume of the air in the gas tank (m3), vi is the volume of the container occupied by each particle, mi is the mass of the air in the gas tank (kg), a is a measure of the attraction between the particles (Pa m6 mol−2), b is a correction term based on the molecular volume(m3 mol−1) of the gas, M is molar mass (g mol−1), and R is the ideal gas constant (R = 8.3143 J mol−1 K−1). For air, the values of a, b, and M are 0.1358, 0.0000367, and 28.97, respectively. The subscript i represents 1 and 2, as labeled in Figure 2.
Based on equations (1) and (2), the pressure differential equation is given as

Because the volume is constant, dVi/dt is equal to 0. Therefore, equation (3) can be simplified to equation (4)

Energy equation
The energy equation 22 can be given in the form of the temperature differential equation

where Gin = dmin/dt; Gout = dmout/dt; G = dmi/dt; Cv is the constant volume specific heat (J kg−1 K−1); Chi is the heat transfer coefficient; Ahi is the total heat transfer area (m2); Ta is the temperature of the internal walls (K); hin and hout are the specific enthalpies of the air flow into and out from the cylinder, respectively; min and mout are the masses of the air flow in and out, respectively; and u is the specific internal energy.
Pressure regulator
Continuity equation
According to the literature, 23 the pressure regulator can be considered to have an air resistance factor. The air flow of the orifice throttle can be calculated as follows

where Ci is the sonic conductance (dm3 s−1 bar−1), ρ0 is the gas density under standard conditions (kg m−3), pu is the upstream pressure (Pa), and pd is the downstream pressure (Pa). In case of the air, the value of ρ0 is 1.185, and subscript i values of 1 and 2 represent the intake and exhaust ports, respectively.
Joule–Thomson effect and the temperature change of throttle reduction
The Joule–Thomson (J-T) expansion, or throttling, is a process in which the enthalpy of a fluid remains constant. In this process, the temperature changes when the pressure drops. The J-T effect
24
is used for expressing the ratio between temperature and pressure changes. The J-T coefficient

According to prior work, 22 the temperature changes before and after throttling can be expressed by
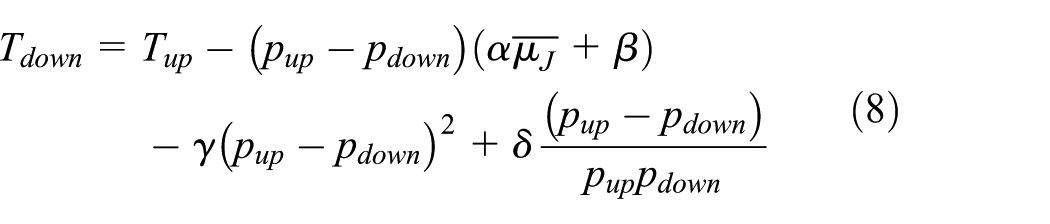
where α, β, γ, and δ are empirical coefficients. The values of α, β, γ, and δ are 3.869, 4.9654 × 105, 1.6 × 1014, and 1.3 × 10−6, respectively


For air, the values of a and b are 0.1358 and 0.0000367, respectively.
Substituting equation (10) into equation (1) yields

where pup and Tup are the pressure and temperature before throttling, respectively, and pdown and Tdown are the pressure and temperature after throttling, respectively.
Dynamic model of the CAE
In the actual working process, the supply pressure of the CAE is lower than the critical pressure pc, so the air in the CAE is considered to be an ideal gas. The thermodynamic model of the CAE has been introduced in author’s previous work. 25 The following equation, derived from Newton’s principle for a rotating body, describes the dynamics of the CAE. Figure 4 shows a model of the CAE coupled to a load. The following equation describes the dynamic system

where Tid indicates the engine torque; Tf is the frictional torque; Tr is the reciprocating torque; TL is the load torque; J is the moment of inertia of the crankshaft, flywheel, main gear, and rotating part of the connecting rod; and

Engine and load model.
It has been suggested in the literature that the piston ring assembly may be the major component of the entire engine friction. 26 In this article, the friction torque includes two important components, one is piston ring assembly friction torque and the other is auxiliaries’ friction torque. The piston ring assembly friction torque is introduced in the author’s previous work. 25 The friction torque for auxiliaries including oil pump, generator, and gears from Zweiri et al. 27 is formulated as

where σ is the friction coefficient which is affected by oil temperature. In this article, the value of σ is considered as a constant value.
Simulation study and experimental verification
Simulation study of the APV
From the discussion above, it can be found that the performance of the APV is determined by many parameters. The major structural parameters of the CAE prototype are shown in Table 2.
Engine specifications and system parameters.

Besides the parameters listed above, the intake and exhaust cam profiles are shown in Figure 5. The maximum lift of the intake valve is 3.5 mm, and it opens at a crank angle of 0° and closes at 90°. The maximum lift of the exhaust valve is 5.7 mm, and it opens at a crank angle of 180° and closes at 355°.

Intake and exhaust cam profiles.
Figure 6 depicts the power characteristics when the supply pressure is 2 MPa and the load torque is 30 N m. It can be seen that when the output torque is equal to the load torque, the output power starts to decrease slowly. The main reason is that the temperature of the intake compressed air drops during the working process. The various instantaneous engine torques lead to the output power fluctuation.

Output torque and power curves with respect to time (s).
While running the dynamic system model, the following air temperatures were monitored: the high-pressure tank (indicated by Thb), the outlet of the high-pressure regulator (indicated by Tha), the low-pressure tank (indicated by Tlb), and the outlet of the low-pressure regulator (indicated by Tla). Figure 7 shows the simulated temperature curves when the set pressures of the high- and low-pressure regulators are 4 and 2 MPa, respectively. It is noted that the temperature dropped sharply during the working process.
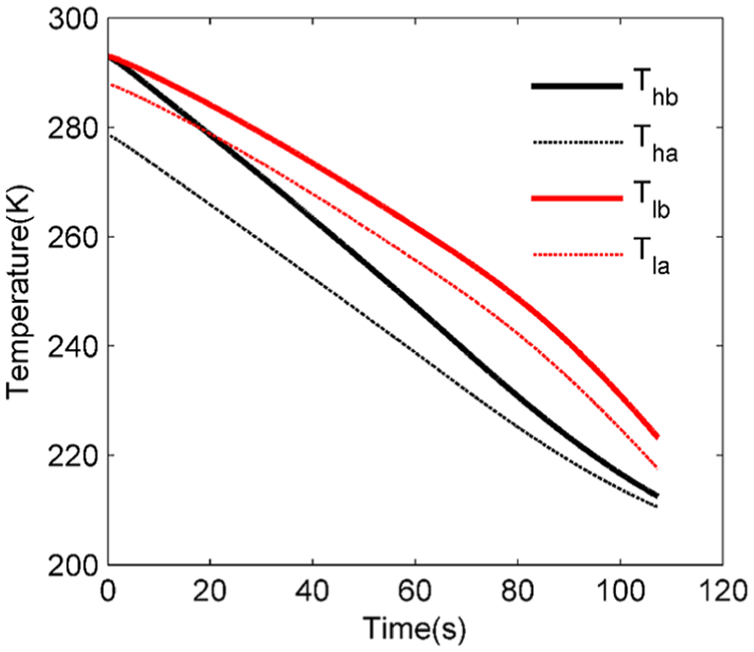
Curves of Thb, Tha, Tlb and Tla during the running process.
The pressure curves of the compressed air in the high-pressure and buffer tanks are shown in Figure 8. It is clear that the pressure of the high-pressure tank decreased dramatically during the working process. In contrast, the pressure of the buffer tank initially remained almost constant as time increased. However, at 80 s, the pressure of buffer tank started to decrease.

Pressure curves of high-pressure and buffer tanks with respect to time (s).
The primary reason is that when the supply air flow is sufficient, the regulator is able to keep the pressure stable. If the supply pressure is insufficient, the regulator will not maintain pressure stabilization.
Figure 9 shows the rotating speed of the crankshaft during the working process. When the average output torque is equal to the load torque, the average speed tends to stabilize. However, it is clear that the rotating speed started to decrease slowly. That is because the energy of supply air continues decreasing as the temperature decreased.

Speed curves with respect to time (s).
Experimental setup
The experiment was setup (as mentioned earlier) to verify the mathematical model. The experimental apparatus, as shown in Figure 10, consists of a high-pressure tank (made of carbon-fiber material), a high-pressure regulator (CONCOA 400 series regulator), a buffer bank, a low-pressure regulator, a flow meter, a CAE, a starter that drives the engine if the intake valve is not open at initial startup, a data acquisition system, a torque transducer (TPS-A-100NM), and an electromagnetic brake. Figure 11 shows a picture of the experimental setup.
Experimental setup of the air-powered vehicle system test rig.

Photograph of the experimental compressed air engine setup.
Before the experiments, 30 MPa of compressed air was stored in the high-pressure tank, and the prototype of the CAE was designed, as shown in Figure 1. The details of the prototype have been published in prior work. 25 The low-pressure regulator adjusted the pressure of the compressed air stored in the buffer tank for various experimental conditions. The flow meter provided air flow under normal operating conditions. The test bench included a 100-N m torque transducer, combined with an electromagnetic brake to measure the power output from the test engine. The electromagnetic brake applied a load varying from 0 to 100 N m. All data from the experiments were transferred to the data acquisition unit for recording and further analysis.
Experimental results
The efficiency of the CAE is defined as the ratio of the output shaft energy to the input energy 25

The output shaft energy can be expressed as

where

where Tout is output torque of the APV system, n is the output speed of the APV system, and t is the running time.
According to Cai et al., 28 the available energy of the compressed air can be calculated as follows

where pa is the atmospheric pressure, Va is the normal volume, and ps is the pressure of the supply air.
The method presented in an earlier section was applied, and the speeds were set from 860 to 260 r min−1 by adjusting the electromagnetic brake. The supply pressure was set at 2 MPa, and the energy efficiency and torque of the APV system was graphed with respect to speed. These are shown in Figure 12.

Torque and efficiency curve with respect to speed.
As shown in Figure 12, it is clear that the trends of the output torque and efficiency change between the simulation and experimental results are consistent. Therefore, the mathematical model has a good reference value for estimating the performance of the real APV system. However, there are two differences between the simulation results and the experimental results: (1) the values of output power and efficiency in the simulation results are greater than the experimental results, and (2) the error between the experimental results and the simulation results increases with the increase in speed.
The main reasons for the differences are summarized as follows:
The simulation is based on the assumption that no leakage occurs during the working cycle. However, in the actual process, leakage at the exhaust and intake valves is difficult to avoid.
Some practical frictional torques, such as those from bearings, the valve train, and pumping losses, are neglected in the mathematical model. As a result, the values of the simulation results are larger than the experimental results.
In the mathematical model, the oil viscosity is considered to be a constant value. However, in fact, the oil viscosity, as a function of temperature and pressure, is typically determined by a nonlinear least-squares method for exponential functions. 27
As the speed increases, the oil pressure increases. The relationship between the oil pressure and speed is shown in Figure 13. It is obvious that as the oil pressure increases, more torque is consumed by the fuel pump. The fuel pump is not considered in this simulation.

Oil pressure curve at different speeds.
Other uncontrollable factors in the experiment, such as fluctuations in the supply pressure, mechanical efficiency, and atmospheric temperature, are also reasons for the differences between the simulation and experimental results.
The gas loss rate is defined as the ratio of the mass of supply gas to the output power

where Qa is the flow rate under normal conditions, ρ is the gas density, and Pe is the output power.
Figure 14 shows the relationship between the output power and gas loss rate with respect to speed at different supply gas pressures.

Output power and gas loss rate with respect to speed.
As shown in Figure 14, the highest output power can be obtained when the speed is approximately400 r min−1. The lowest gas loss rate can be obtained at the lowest speed. When the speed is >600 r min−1, the gas loss rate increases rapidly. In the actual process, the APV system may have obtained better efficiency at lower speed. However, speed fluctuations increased with decreasing speed during the running process. Therefore, the speed of the CAE should be controlled within a certain range.
The CAE stopped at approximately 5.8 mA. When the electric current reached 9 mA, the air control valve opened fully. The experimental results between I and the speed of the CAE are approximated by the polynomial curve (y), as shown in Figure 15. The electric current (I) either increased or decreased linearly by controlling the unit with the following cycle: 5.8 → 9 → 5.8 mA (within a 2-s period). In fact, the polynomial curve can be used as a control function, and in the following section, it is converted to a transfer function.
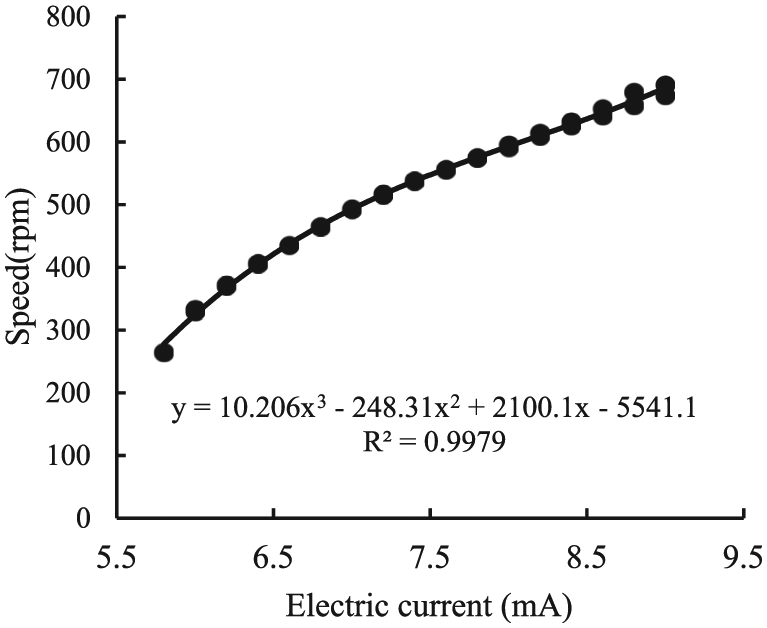
Relationship between the electric current I and the speed.
Fuzzy control design
The experimental results show that the control speed and supply pressure are important parameters to improve the APV system performance. When the external load decreases, the supply pressure is adjusted to maintain a steady speed. To improve the performance, we implemented fuzzy logic with a proportional–integral–derivative (PID) control scheme for the APV system. The PID control diagram is shown in Figure 16. First, we tried to select the best parameters for the PID controller based only on the error and its integration, as described by equation (19)


Fuzzy PID control diagram.
The selections of kp, ki, and kd vary for different external loads. Hence, we implemented the fuzzy logic control to improve the system performance. Initially, large values of kp, ki, and kd were required to have enough control power in overcoming static friction and improving the transient response. After the transient period, the values of kp and ki were decreased to maintain a good performance at the steady-state stage. The switching rules on the kp, ki, and kd are based on the following fuzzy inference rules

where E and EC represent error and its variation rate, respectively.
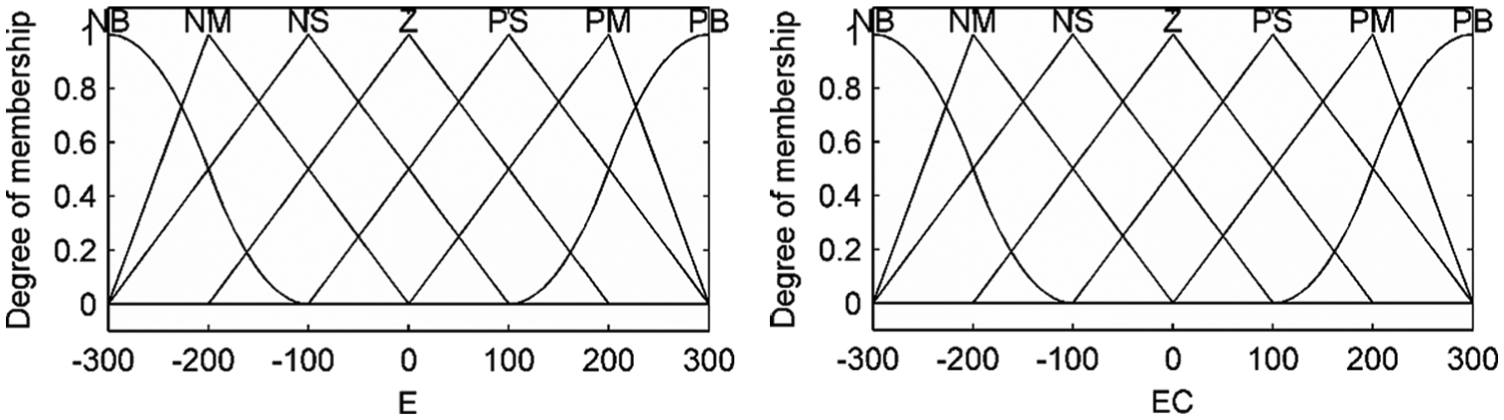
Fuzzy of membership functions for the error E and the error rate EC.
According to the experimental results, the speed ranges from 300 to 500 r min−1. The response of the system under different speeds is shown in Figure 18. It is obvious that fuzzy PID control has a good control effect.

Fuzzy PID control.
Conclusion
In this article, an APV was introduced. Simulations and experimental studies of the APV were performed, and the conclusions are summarized as follows:
The trends of the output torque and efficiency from the simulation results are consistent with the experimental results. The mathematical model has a good reference value in estimating the performance of the real APV system.
The highest output power 1.92 kW can be obtained when the supply pressure is 2 MPa, and the speed is 420 r min−1. The lowest gas loss rate can be obtained at lowest speeds.
To obtain a stable speed and a good economic performance, the speed of the prototype should be controlled between 300 and 500 r min−1.
The fuzzy control has a good control effect. The actual speed stabilizes quickly and reaches the desirable speed.
Footnotes
Academic Editor: Amir Alavi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Foundation of Beijing Municipal Science and Technology Commission.