
Abstract
To achieve perfect behavior of the unbalanced barrel of a gun control system, a novel control strategy for simultaneous balancing and positioning of the system is proposed, physically being on the basis of a novel hydraulic cylinder with three cavities. The fuzzy fractional order proportional–integral–derivative controller is developed, and the particle swarm optimization algorithm is adopted for optimal selection of the control parameters for the gun control system. The results demonstrate that the fuzzy fractional order proportional–integral–derivative control strategy can finely improve dynamic performance of the control system, and the nonlinear characteristics of system can be effectively suppressed.
Keywords
Introduction
For precise positioning of a gun barrel, one of the key issues to be resolved is the balancing of the inherent unbalanced forces induced by the unbalanced weight. Unbalanced weight is generated due to the factor that the tube centroid is not in the axis of the trunnion. The corresponding unbalanced disturbances will strongly deteriorate the positioning performance for the tube.1,2 In this article, the balancing chamber of a three-cavity power cylinder is especially designed to realize the real-time balancing of the system during the process.
With the consideration of the inherent fractional order features of the barrel motions, initial motion errors, and random disturbances, using fractional order proportional–integral–derivative (FOPID) controller can achieve horizon control of the barrel motion. State-of-the-art research demonstrates that PID controller has better control performances for nonlinear systems using fractional orders when comparing with that using integer orders.3,4 FOPID controller in direct current (DC) motor motion control system has high robustness.5–7 FOPID can also lead to better working performances in the third-order electro-hydraulic servo system. 8 This also provides fractional order thought for our third-order system.
Due to the varying loading, complex disturbing factors, and inaccurate mathematical models, control parameters of the FOPID controller are required to be continuously adjusted to obtain optimal control performances during the process. In general, the fuzzy controller is an effective way to solve the complex system.9,10 The fuzzy controller can give full play to the role of FOPID controller so that the whole system can achieve the best control effect.11–13
Particle swarm optimization (PSO) algorithm is a kind of bionic optimization algorithm, 14 it is easy to understand and can be implemented on the computer. PSO algorithm can be used for complex optimization problem of nonlinear function and has been widely used in all kinds of parameter optimization of continuous and discrete problems.15–17 The control system of a gun barrel has many nonlinear factors, parameters optimization in the control strategies of fractional order and fuzzy theory can improve the system performance and show better control effect.18–20
In conclusion, the strategy based on the PSO algorithm is proposed and applied to optimally design the fuzzy FOPID controller for simultaneous balancing and positioning of the barrel. The simulation and experiment results show that this strategy has good control performances for the gun control system with strong nonlinear effects.
Balancing and positioning servo system
The structure of balancing and positioning system driven by three-cavity hydraulic cylinder is shown in Figure 1. In the process of barrel switching, pressure sensors are used to measure the pressure of three cavities, including the upper cavity, lower cavity, and balancing cavity. Control volume can be calculated using sensor measurements through balancing controller. This control volume acts on the proportional relief valve to adjust the ratio of the pressure relief valve and achieve active compensation for unbalanced force of system. On the basis of the balance, corner feedback control is constructed through the resolver; using the control strategy, we can calculate control signal for accurate positioning of barrel, the control signal will control the barrel positioning through the proportional servo valve.

Structure of balancing and positioning hydraulic servo system.
Establishment of mathematical model
Before establishing the system model, the following assumptions are considered: the flow outside the throttle window is turbulent; the compression performance of fluid in the valve is ignored; valve has the ideal response performance, namely corresponding flow changes can response in time according to the spool displacement and the valve pressure drop; pressure loss of the pipe and pipeline dynamics are not considered; and pressure saturation phenomenon does not appear in the pipe and the cylinder cavity.
For the system structure shown in Figure 1, we define status variables as

where

According to the complex dynamics features of the barrel,
Proportional relief valve will control the pressure of balancing cavity, and the balancing torque provided by balancing cavity can be obtained as follows
where
The ideal status variable is defined as

Tracking error

The nonlinear dynamic equation of electro-hydraulic servo system is difficult to obtain accurately, so it is necessary to make the linear assumption and use the method of system identification to obtain the approximate linear equation. The control goal of the electro-hydraulic servo system is to make the actual state
Fuzzy FOPID controller based on PSO algorithm
Positioning controller of barrel balancing and positioning electro-hydraulic servo system is designed as fuzzy FOPID controller based on PSO algorithm. For designed positioning controller, the inputs are the error signal

Fuzzy FOPID controller based on PSO algorithm.
Fractional order PIλDμ controller
Fractional calculus is the theory about any order differential and integral calculus and is the generalization of integer order calculus. Different from the integer order controller, fractional order controller has its own unique performance and features.
The basic operator of fractional calculus is
where
In the control system, there are unknown function signals in the loop, so the filter is used to approximate the filter. This article uses the Oustaloup method which is easy to implement and has good approximation effect. Assuming that the selected fitting frequency segment is

where
The mathematical model of fractional order controller is

According to the different order of the objects, you can choose different
Fuzzy fractional order controller
Based on the fractional order
The expression of fuzzy logic tuning FOPID controller is given as

where
Controller parameters can be obtained from the current controller parameters and fuzzy inference controller parameters increment. According to status variable

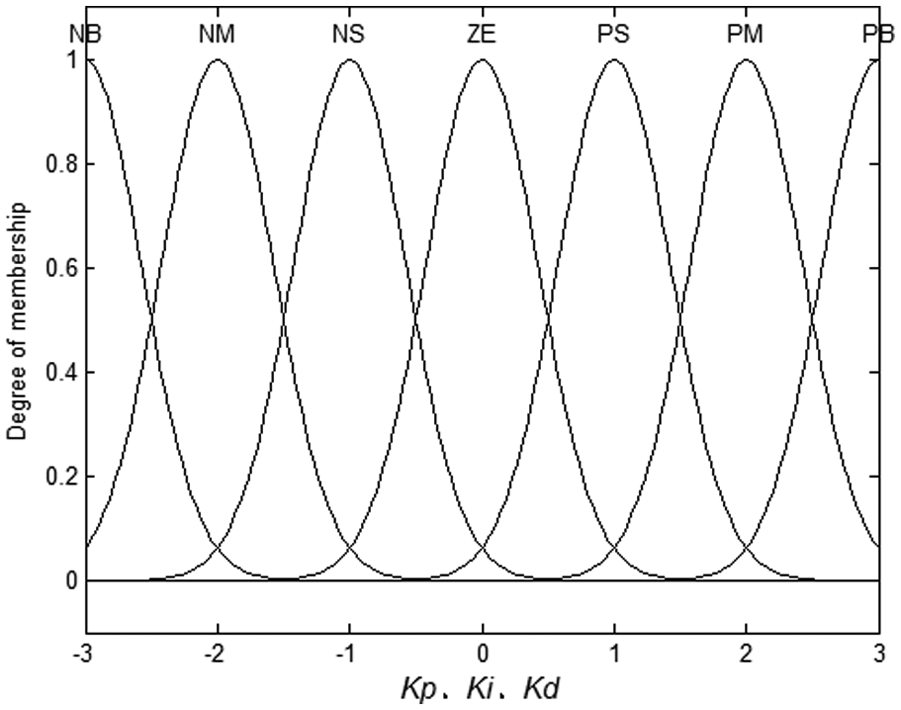
The Mamdani-type fuzzy controller with dual input and three outputs is selected for real-time adjustment of FOPID parameters
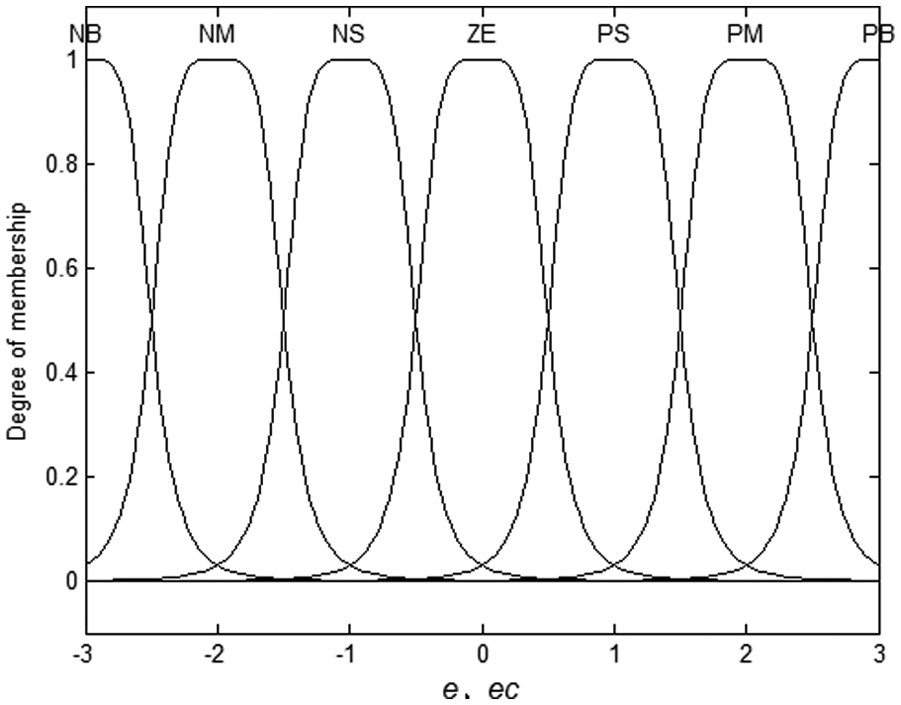
e and ec membership function.
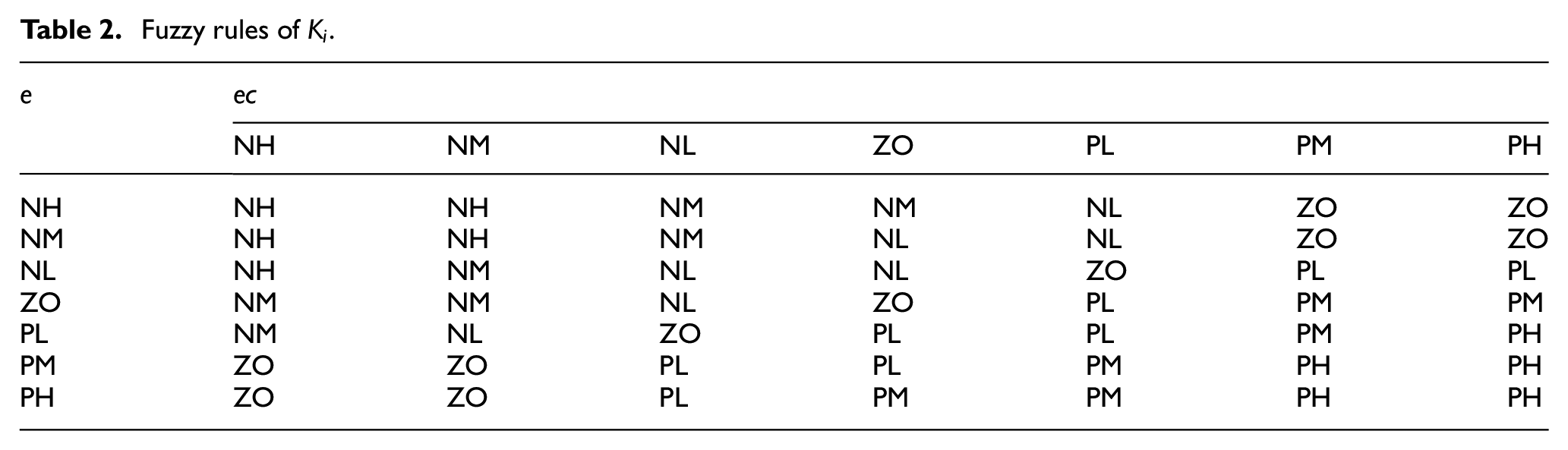
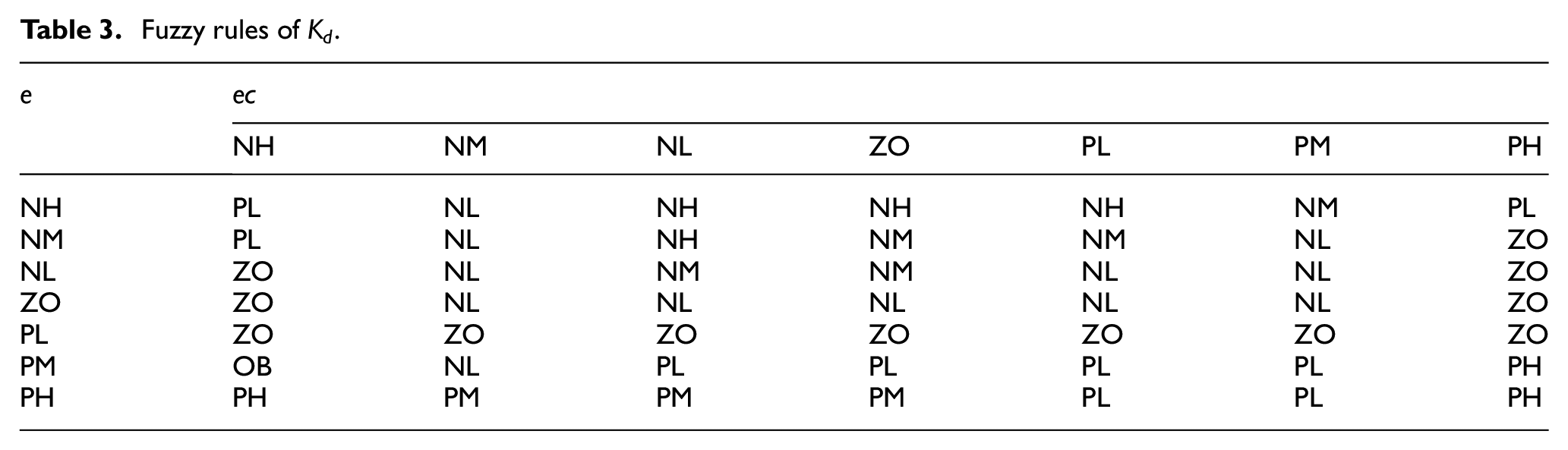
The seven simulation subsets of the variables e and ec are defined as PH, PM, PL, ZO, NL, NM, and NH, referring to positive large, positive medium, positive small, zero, negative small, negative medium, negative large, respectively. According to the summary of relevant technical knowledge and practical operation, the corresponding fuzzy rules are shown in Tables 1–3.
Fuzzy rules of

Fuzzy rules of
Fuzzy rules of
Parameters
PSO algorithm optimization
PSO is an evolutionary algorithm based on group, which is developed from the research of social behavior of the birds and the fish. In the space of searching solution of D-dimensional parameter, the size of population scope is n. Each particle is treated as a candidate solution, where the entire location of ith (
In order to avoid local optimal solution, we add a local adaptive mutation operator to adjust


where

where
In the simulation of PSO algorithm, vector parameter to be identified is X, the number of particle group is n = 80, the maximum number of iterations is G = 200, the maximum speed of the particle motion is Vmax = 1.0, namely speed range [−1, 1], learning factors are c1 = 1.3, c2 = 1.7, inertia weight linearly decreases from 0.9 to 0.1. Using real coding, we take identification error indicators as

where N is the number of test data and
We can use PSO algorithm to obtain the optimal parameters of fuzzy FOPID controller, including

If k do not satisfy the closed-loop stability, the total evaluation index of the particle k is expressed as
The steps of algorithm design are as follows:
Random initialization of the particle population in a given scope, including the initial position and velocity;
Calculating the total performance of each initial particle index (plus loss function);
Getting the optimal position
Updating the speed and position of each particle;
Determining whether to reach the end condition, if yes, ending the search, or return to the second step;
The final
Setting the number of iterations as 200, it can be seen from Figure 5 that it has found the optimal value when the number of iterations is 50, and be kept unchanged essentially after that.

Fitness values versus generations.
Analysis of system simulation
The selected parameters in electro-hydraulic servo system are as follows:
In this article, system simulation model is constructed through the MATLAB/Simulink. In order to prove the advantages of the designed positioning control algorithm, the different response situations compared with FOPID and fuzzy FOPID of step and sine input are analyzed. Under the step input signal, angle tracking curve with load disturbance is shown in Figure 6, and the torque error curve is shown in Figure 7. The step signal is changed into sinusoidal signal input, and the tracking curve is shown in Figure 8, whereas torque error is shown in Figure 9.

Angle tracking curve of step input angle.

Torque error curve of step input.

Angle tracking curve of sinusoidal input.

Torque error curve of sinusoidal input.
Figure 6 shows that the response curves of three cases have no overshoot, the response time of the FOPID is about 1.7 s, fuzzy FOPID is about 1.6 s, and the response time of the PSO-fuzzy FOPID is about 1.3 s. The rise time and settling time under open-loop conditions in the article are tr = 200 ms and ts = 250 ms. In order to further compare the robustness of three kinds of control strategies, the square wave is added as external load disturbance when the simulation time is t = 3–4 s and the amplitude of square wave is 2 kN m. The maximum response value of PSO-fuzzy FOPID is 0.2064 rad, significantly less than the maximum response 0.2116 rad of FOPID control strategy and the maximum response 0.2116 rad of fuzzy FOPID, the designed control algorithm for suppressing the disturbance is more obvious torque error curve is shown in Figure 7, balance torque provided by balancing cavity can compensate for the external load torque, the steady-state torque error is less than 10 N m, and reducing the torque error can effectively improve balancing and positioning accuracy of the system.
As shown in Figure 8, step disturbance is investigated where its value is 2 kN in the process of angle tracking. The steady-state error of three strategies is about ±0.01 rad, the maximum tracking error of PSO-fuzzy FOPID is 0.0031 rad, the maximum error of fuzzy FOPID and FOPID is 0.0051 and 0.0085 rad, respectively. PSO-fuzzy FOPID is 2.74 times of FOPID and 1.6 times of fuzzy FOPID. The response curve of torque error in Figure 9 presents sinusoidal variation, the maximum torque error caused by disturbance torque is 16.8 N m, and the balance effect is remarkable.
Experimental analysis
To validate the feasibility and effectiveness of the proposed control strategy, this article carries on the experiment research. As shown in Figure 10, the experimental platform is mainly composed of test-bed, hydraulic station, computer control, measurement system (resolver, resolver-to-digital converter (RDC) module), servo amplifier, industrial personal computer (IPC), and so on; through control computer, we can realize accurate positioning of barrel with three-cavity hydraulic cylinder.

Physical map of test platform.
Figures 11 and 12 show the response curve of the system with the input step signal of 0.2 rad, and when the time is 6 s, we add sinusoidal disturbance, it lasts 1 s, frequency is 1 Hz, and the amplitude is 2 kN m. Figure 11 is used to show the change of the system voltage, and Figure 12 shows the response error curve of experiments.

Control effort with disturbance.

Error curve of angle tracking.
As shown in Figure 11, maximum control voltage
As shown in Figure 12, the steady-state error in this two cases is in the range of ±0.0005 rad, maximum angle error under PSO-fuzzy FOPID control strategy is 0.0121 rad, the actual angle tracking error of fuzzy FOPID is 0.0344 rad, and parameters of PSO optimization make tracking accuracy improved by about 2.8 times. The experimental results show that PSO-fuzzy FOPID has strong robustness. Figure 13 gives the error curve between heavy torque and balancing torque under the interference condition, the steady-state error keeps 15.841 N m, the maximum torque error within the disturbance range is less than 20.549 N m, external disturbance of system is effectively suppressed, and active balancing compensation of unbalanced torque has obvious effect.

Torque error with sinusoidal disturbance.
Conclusion
In terms of the requirements for balancing and positioning of the unbalanced barrel, we design and use the balancing cavity of a cylinder to compensate for the internal and external unbalancing disturbances. Combining the FOPID controller and the fuzzy control strategy can well update parameters of fractional order controller online and make the selected control parameters more reasonable. Combining advantages of the fuzzy FOPID controller, PSO-fuzzy FOPID control strategy is proposed for balancing and positioning of the electro-hydraulic servo system in this article. The simulation and experimental analysis are carried out, demonstrating that the proposed strategy has high dynamic control accuracy, and it has higher tracking accuracy and can effectively suppress the inherent nonlinear characteristics of the control system.
Footnotes
Academic Editor: António Mendes Lopesc
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in this article was supported by the National Natural Science Foundation of China (51305205).