
Abstract
This article presents a hybrid swarm intelligence of artificial immune system tuned with Taguchi–genetic algorithm and its field-programmable gate array realization to optimal inverse kinematics for a 5-degree-of-freedom industrial robotic manipulator using system-on-a-programmable-chip technology. This hybridization strategy with a Taguchi–genetic algorithm parameter tuner improves the performance in conventional artificial immune system paradigms. The field-programmable gate array realization of the proposed artificial immune system tuned with Taguchi–genetic algorithm is more effective in practice for real-world embedded applications. This system-on-a-programmable-chip–based artificial immune system tuned with Taguchi–genetic algorithm is then applied to the optimal inverse kinematics redundancy solver of a 5-degree-of-freedom robotic manipulator. The optimal joint configuration is obtained by minimizing the pre-defined affinity function in artificial immune system tuned with Taguchi–genetic algorithm for real-world embedded robotics application. The experimental results and comparative works are presented to show the effectiveness and merit of the proposed system-on-a-programmable-chip–based artificial immune system tuned with Taguchi–genetic algorithm intelligent inverse kinematics redundancy solver for a 5-degree-of-freedom industrial robotic manipulator. This system-on-a-programmable-chip–based artificial immune system tuned with Taguchi–genetic algorithm solver outperforms the conventional solvers, such as geometric solvers, Jacobian-based solvers, hybrid genetic algorithm solvers, and particle swarm optimization solvers.
Introduction
Swarm intelligence is a set of nature-inspired computational methodologies for solving the optimization problems in a wide variety of real-world applications.1–3 Over the past few years, some of the well-known optimization paradigms such as genetic algorithm (GA), particle swarm optimization (PSO), and ant colony optimization (ACO) have been successfully employed to address the engineering optimization problems.1–7 Among these modern metaheuristic-based approaches, artificial immune system (AIS) inspired by the biological immune system was introduced by De Castro and Timmis 8 and has emerged as an efficient computational paradigm to NP-hard combinatorial optimization problems. These adaptive and robust AISs have been successfully applied in many disciplines by exploiting its strong optimization ability.8–12
To date, there are some modified hybrid AISs proposed to improve the performance, for example, Yap et al. 13 proposed a hybrid PSO-based AIS for multimodal function optimization and engineering application problem in which half the population of AIS is generated from PSO. Mohammed et al. 14 presented a motor controller design using hybrid genetic-immune; the initial population of AIS is from the last population of GA. Bernardino et al. 15 introduced a hybrid GA–AIS for constrained optimization problems in engineering; the clonal selection and mutation of AIS are used inside the GA process. Unfortunately, these studies did not cope with the parameter optimization problem; these AIS control parameters affect the performance of the hybrid AIS algorithms. The AIS parameters in these researches are set by an inefficient trial-and-error approach.8–15 Moreover, these PC-based AISs8–15 are not suitable for real-time embedded robotics applications. These disadvantages of the PC-based hybrid AIS algorithms can be circumvented by using the Taguchi–GA and system-on-a-programmable-chip (SoPC) hardware/software codesign technology in field-programmable gate array (FPGA) chips.16–21
Taguchi–GA is a standard GA tuned with Taguchi quality method.22–24 This approach has proven to be an important tool in the system design and process quality and has been applied to solve many optimization problems in electrical machines’ design, aerospace engineering, and controller design.22–24 Compared to conventional GAs, this method has fewer experiments to obtain optimal GA parameters in solving optimization problems using the orthogonal array and signal-to-noise ratio (SNR) techniques. In this study, the AIS swarm intelligence is tuned with Taguchi–GA to obtain better performance. This artificial immune system tuned with Taguchi–genetic algorithm (AISTGA) is then realized in FPGA to address the inverse kinematics problem of high-degree-of-freedom (DOF) industrial robotic manipulators. With the benefits of flexibility, hardware/software codesign, and intellectual property (IP) re-usability, this FPGA computing has been shown to be useful to design artificial swarm intelligences in embedded applications which contain memory, custom logics, and processor cores.16–21 As the authors’ best understanding, there has been no attempt to designing intelligent FPGA-based AISTGA inverse kinematics solvers for high-DOF robotic manipulators.
High-DOF industrial robotic manipulators with more than five links have attracted much attention in robotics research during the last decades. Such robotic manipulators have been widely employed in many applications, including industrial manufacturing, factory automation, entertainment, space, and military.25–28 The robot kinematics can be divided into forward (direct) kinematics and inverse kinematics.27–28 The inverse kinematics in high-DOF manipulators is a much more complex problem compared with the direct kinematics25–28 because the inverse kinematics is one to many and there are many complex inverse trigonometric functions in the inverse kinematics equation. This redundancy problem refers to the fact that the joint space of robot has a larger dimension than the task space,27–28 and there has been no generalized closed-form solution for the high-DOF robotic manipulators.26–27
The inverse kinematics redundancy problem of the high-DOF robotic manipulators has been addressed in last decade using geometric method, 29 analytical method, 30 and Jacobian method. 31 The geometric method and analytical method can be used only in some simple robotic manipulators. These ineffective approaches are not suitable for high-DOF robotic manipulators because the solution to the inverse kinematics solution is very difficult or impossible.29–31 On the other hand, the Jacobian-based solvers suffer from the complex Jacobian matrices and singularities, that make the joint solutions are not easily obtained. 31 Overall, these solvers did not provide a generalized optimal joint configuration of the high-DOF robotic manipulators, meaning that these solvers are not applicable to other high-DOF robotic manipulators.
The objective of this article is to design a pragmatic FPGA-based intelligent AISTGA inverse kinematics solver for high-DOF robotic manipulators to provide an optimal joint configuration. The AISTGA computational intelligence is realized in FPGA to efficiently construct an embedded immune-inspired AISTGA solver for a 5-DOF industrial robotic manipulator. The rest of this article is organized as follows. In section “AISTGA swarm intelligence,” the AISTGA swarm intelligence is introduced. Section “FPGA-based AISTGA redundancy solver of robotic manipulators” elaborates the SoPC-based AISTGA redundancy solver together with the motion profile and proportional–integral (PI) controller of the 5-DOF industrial robotic manipulator. Section “Experimental results and discussion” conducts the experimental results and comparative works to show the performance and merit of the proposed methods. Section “Conclusion” concludes this article.
AISTGA swarm intelligence
AIS swarm intelligences evolve improved solutions of the complex combinatorial problem by means of immune system, clonal selection, and hypermutation. Compared to GA and PSO bio-inspired mataheuristics, this computational paradigm with different evolutionary strategies is relatively new to solving real-world optimization problems in which conventional methodologies are ineffective or infeasible.1–7 This section aims at developing a hybrid AIS swarm intelligence tuned with Taguchi–GA. The control parameters of AIS are optimized via the efficient Taguchi–GA approach.
AIS swarm intelligence
AIS swarm intelligence applies a learning method influenced by the human immune system. It searches a problem space in the optimization problem with a population of individuals (candidate solutions), called antibodies. In order to evaluate the performance of the antibody, each antibody is assigned an affinity which is pre-defined in the optimization problem. The antibodies with highest affinity are cloned, hypermutated, and selected.8–12
Antibody encoding scheme
In AIS algorithm, an antibody (solution) is represented by a string of numbers consisting of the parameters in the optimization problems. Notice that the initial population for each antibody is randomly generated. This encoding method shares the similarities with the evolutionary algorithms (EAs), PSO, and GAs.
Affinity representation and measurement
Affinity is the fitness value of antibodies in AIS algorithm. Space-shape concept is developed to measure the complementary space between receptor molecules and antigen.
8
This method presented a generalized shape of a molecule (m) in a L-dimension real space
The Ag-Ab affinity is related to their space distance between antibody strings or vectors. The distance D in the Ag-Ab binding vectors can be defined by Euclidean distance, Manhattan distance, and Hamming distance.8,9
Clonal selection
This process in AIS swarm intelligence is the selection of a set of antibodies with the highest affinity. The selected antibodies are then cloned to have a higher binding affinity with the invading antigens. In this study, the number of clones

where i is the ith highest affinity antibody in the population, n is the number of selected antibodies for cloning,
Somatic hypermutation
The mechanism plays a critical role in creating diverse antibody receptors and in increasing antibody affinity and specificity.8,9 In the proposed AIS, the hypermutation rate

where A* = A/Amax is the normalized affinity and
AISTGA
AIS swarm intelligences have the advantage that good antibody solutions are evolved quickly in solving the various optimization problems.8–10 However, these conventional AISs suffer from the parameter tuning and premature convergence problems. To address these problems, AISs have been hybridized with other search algorithms with different strategies.13–15 This hybrid approach has been proven useful in improving the AIS performance. This subsection is devoted to developing a hybrid AISTGA; this computing method not only circumvents the premature problem in conventional AIS13–15 but also resolves the parameter optimization problem in the hybrid AIS algorithms.
Taguchi–GA
Taguchi–GA is a hybrid approach that combines conventional GA and Taguchi quality method. GA is a search technique widely used in computing to find true or approximate solutions to optimization and search problems by using the GA operators such as selection, crossover, and mutation.22–24 Each chromosome represents an individual solution (genes) to the problem. The best solutions (chromosomes) are evolved via this GA evolutionary process. There are four control parameters in GAs, including population size (S), number of generation (N), crossover rate (Pc), and mutation rate (Pm).
Taguchi method is a statistical method developed by Genichi Taguchi to improve the product quality and cost in industrial design.22–24 This experimental method can reduce the disturbance caused by randomness and can help determine the optimal parameters in the GA. This robust quality method was constructed based on the principle of an orthogonal array that can effectively minimize the number of experiments required in any design process.22–24 This approach can provide an efficient way to obtain the optimal GA parameters. SNR is used in Taguchi method to measure the quality of each experiment in the orthogonal array. The loss function is defined differently according to the way quality is measured. This article adopts the small-the-better characteristic and the SNR is given by

where Nt represents the number of repeated experiments and
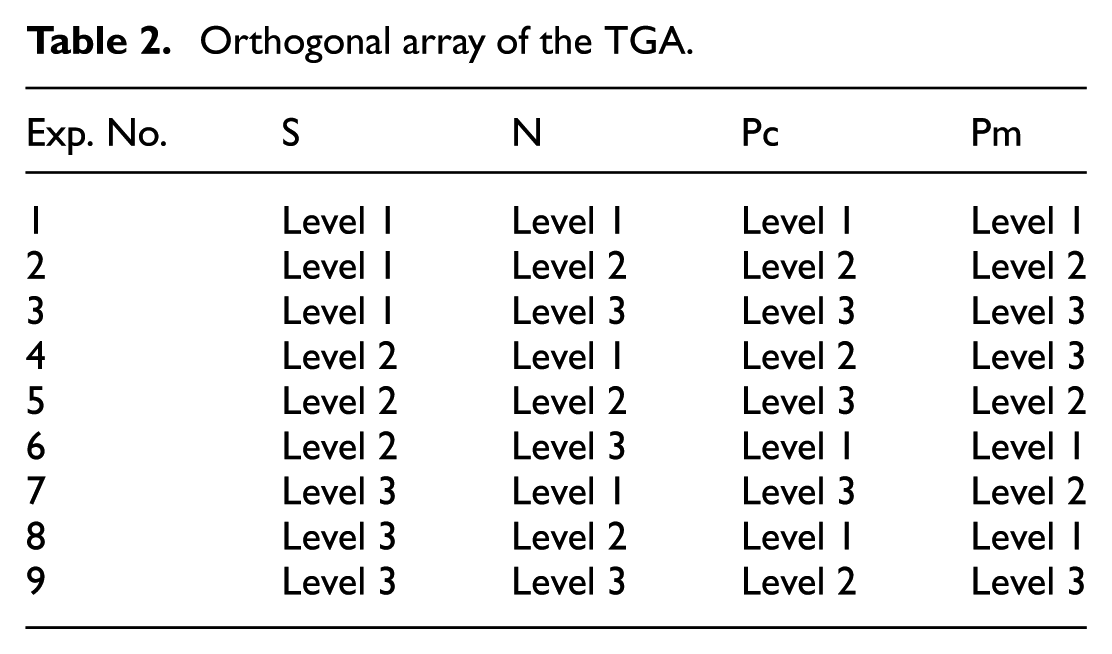
With the orthogonal array and SNR, the control parameters in GA can be properly set to obtain optimal performance only using a few experiments rather than the unreliable hand-tuned approach. In Taguchi-based GA, there are four control parameters to be optimized using Taguchi quality method, including population size (S), number of generation (N), crossover rate (Pc), and mutation rate (Pm). Table 1 lists the control factors and their three levels and Table 2 presents the L9 (34) orthogonal array of the TGA in this article. The full factorial design method requires 34 = 81 experiments while the Taguchi method needs only nine experiments to obtain the approximate optimal values. This qualified TGA serves as an AIS control parameter tuner in the proposed hybrid AISTGA swarm intelligence. Compared with the conventional hybrid approaches, this AISTGA obtains the benefits of Taguchi quality method and GA global optimization.
Control factors and their levels.

Orthogonal array of the TGA.
AISTGA control parameter tuner
This article employs the TGA to optimize the value of each control parameter. In the proposed hybrid AISTGA computing, each chromosome represents one set of values for each of these parameters where each gene corresponds to one of the parameters. More precisely, each TGA chromosome is a combination of AIS parameters, such as population size (P), number of generation (Ng), the number of selected antibodies for cloning n, clonal multiplying factor
The hybrid AISTGA swarm intelligence for solving complex optimization problems is described by the following steps:
Step 1: initialize the AIS algorithm using TGA; each TGA chromosome is a combination of AIS parameters, including P, Ng, n,
Step 2: randomly generates an antibody population of size S (Ab1, …, Abs). Each antibody contains genes to represent the optimization problems.
Step 3: calculate the affinity value for all the antibodies using the affinity function.
Step 4: generate clone set for the best n antibodies using equation (1). The number of copies is proportional to their affinities: the higher the affinity, the larger the clone size.
Step 5: update antibodies.
Step 6: perform hypermutation process using equation (2) to increase the diversity and generate the matured clone set.
Step 7: check the stopping criterion. If the stop criterion is not matched, go to Step 3 and set
FPGA-based AISTGA redundancy solver of robotic manipulators
In this section, the direct kinematics of the general-purpose 5-degree industrial robotic manipulator Mitsubishi Movemaster EX is first derived, and the SoPC implementation of the AISTGA solver is developed to cope with the redundancy problem. This FPGA-based AISTGA redundancy solver is integrated with the trapezoid velocity profile and PI control scheme together with the hardware-based IPs and real-time operating system (RTOS) in the same chip. This approach not only takes the advantages of FPGA implementation but also provides an inexpensive and high-efficient embedded control system for the industrial robotic manipulator.
Forward kinematics of the 5-DOF robotic manipulator
Denavit–Hartenberg (D-H) modeling has become the standard in mathematical representation of robotic structures and is widely used in the robotics.25–26 Following this convention, the resulting transformation matrix

where
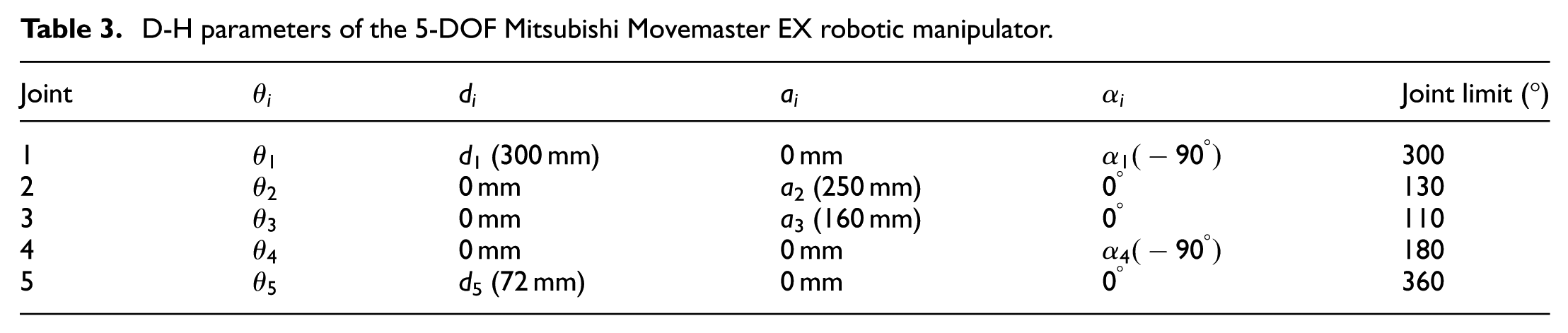
Figure 1 depicts the picture of the Mitsubishi Movemaster EX industrial robotic manipulator with a full 5 DOFs. It is a fairly compact industrial robot manipulator that can perform virtually any task, from picking and moving components to complex manipulation sequences. Figure 2 presents the link coordinates of the 5-DOF robotic manipulator where each joint coordinate frame is defined. Table 3 lists all the D-H parameters of the 5-DOF Mitsubishi Movemaster EX robotic manipulator.

Picture of the 5-DOF Mitsubishi Movemaster EX robotic manipulator.

Link coordinates of the 5-DOF robotic manipulator.
D-H parameters of the 5-DOF Mitsubishi Movemaster EX robotic manipulator.
The transformation matrix



Therefore, the pose matrix of the end-effector with respect to the fixed reference frame can be expressed as follows

where
The direct kinematics of the Mitsubishi industrial Movemaster EX robotic manipulator is derived in equation (8), namely, that for the given joint vector
AISTGA swarm intelligence for solving the inverse kinematics redundancy problem
With the derived direct kinematics equation (8), the proposed AISTGA swarm intelligence is employed to solve the redundancy problem. Compared with the conventional solvers,29–31 the proposed hybrid AISTGA solver not only provides generalized optimal joint configurations but also avoids the complex computations and singularities of Jacobian matrices to resolve the main redundant problem in robotics research. This subsection aims at developing an efficient AISTGA inverse kinematics redundancy solver for the 5-DOF robotic manipulator shown in Figure 1. The optimal joint variables (memory cells) are evolved via the AISTGA process in a given position vector of the robot end-effector.
In AISTGA swarm intelligence for solving the inverse kinematics redundancy problem, an antibody represents the joint variables
The proposed AISTGA swarm intelligence will be used to minimize the joint movement and position error of the 5-DOF robotic manipulator in this redundancy problem. The joint configuration q of the robotic manipulator can be represented by

where the vector

and the final state of the 5-DOF industrial robotic manipulator is defined by

The desired final position vector of the robot’s end-effector in Cartesian space is represented by
Affinity indicates the binding capability between an antibody and an antigen in the proposed hybrid AISTGA paradigm. The Ag-Ab affinity function (fitness function) in the proposed AISTGA solver can be defined as either minimum movement of the robotic manipulator or position error of the robot’s end-effector. The affinity function (performance index)
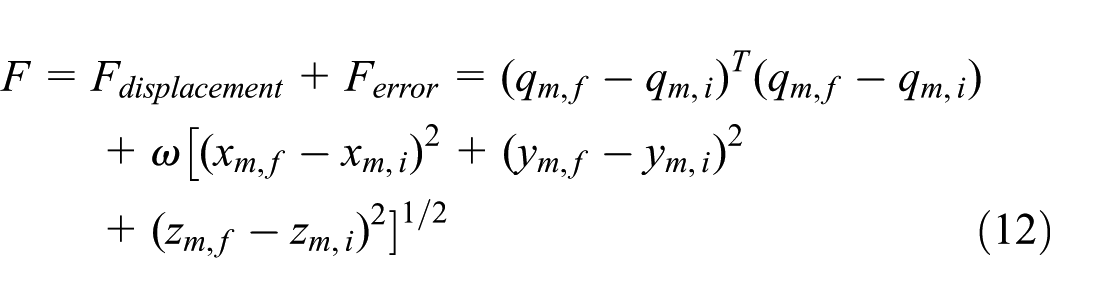
where
FPGA implementation of the AIS solver, trapezoid motion profile, hardware IPs, and PI controller
This section is devoted to designing an efficient SoPC-based AISTGA inverse kinematics solver for the 5-DOF industrial robotic manipulator in FPGA chip. This SoPC-based AIS solver is integrated with the trapezoid velocity profile and PI control scheme together with the hardware-based IPs and RTOS in the same chip. This FPGA implementation presents a pragmatic and inexpensive control system for the robotic applications in comparison to conventional control systems. 28
In this article, the AISTGA swarm intelligence has been implemented into the 32-bit soft-core embedded processor. The optimal feasible joint sequence or memory cell
In motion control of the robotic manipulator, once the inverse kinematic problem is solved, the next goal is to design a motion profile and PI controller for each joint. This article employed the trapezoid motion profile which is widely used in robotic manipulator researches to achieve multiple axes motion control of high-DOF robotic manipulators. 32 Once the motion profile of the 5-DOF robotic manipulator is completed, the PI control scheme is adopted in this article to implement the servo drives. The trajectory motion profile and PI controller were realized by C/C++ executed by the embedded soft-core processor Nios II in the FPGA. Compared with the PC-based hybrid AISs,13–15 the proposed FPGA-based AISTGA intelligent controller is more efficient and practical for robotics applications.
Experimental results and discussion
The aims of the experiments are to examine the effectiveness and performances of the proposed SoPC-based AISTGA swarm intelligence to solve the inverse kinematics redundancy problem of the 5-DOF industrial robotic manipulator in Figure 1. The initial state
With only the forward kinematics equation (8) and position vector
Figure 3 presents the affinity behavior of the proposed SoPC-based AISTGA computational intelligence to solve the redundancy problem of the 5-DOF robotic manipulator. The affinity of the SoPC-based AISTGA inverse kinematics redundancy solver converges to constant successfully, meaning that the AISTGA solver searches for the optimal configuration of the robotic manipulator with minimum AIS affinity in equation (12).

Fitness value (affinity) of the proposed SoPC-based AISTGA swarm intelligence for the industrial robotic manipulator.
Figure 4 depicts the evolved optimal joint angles
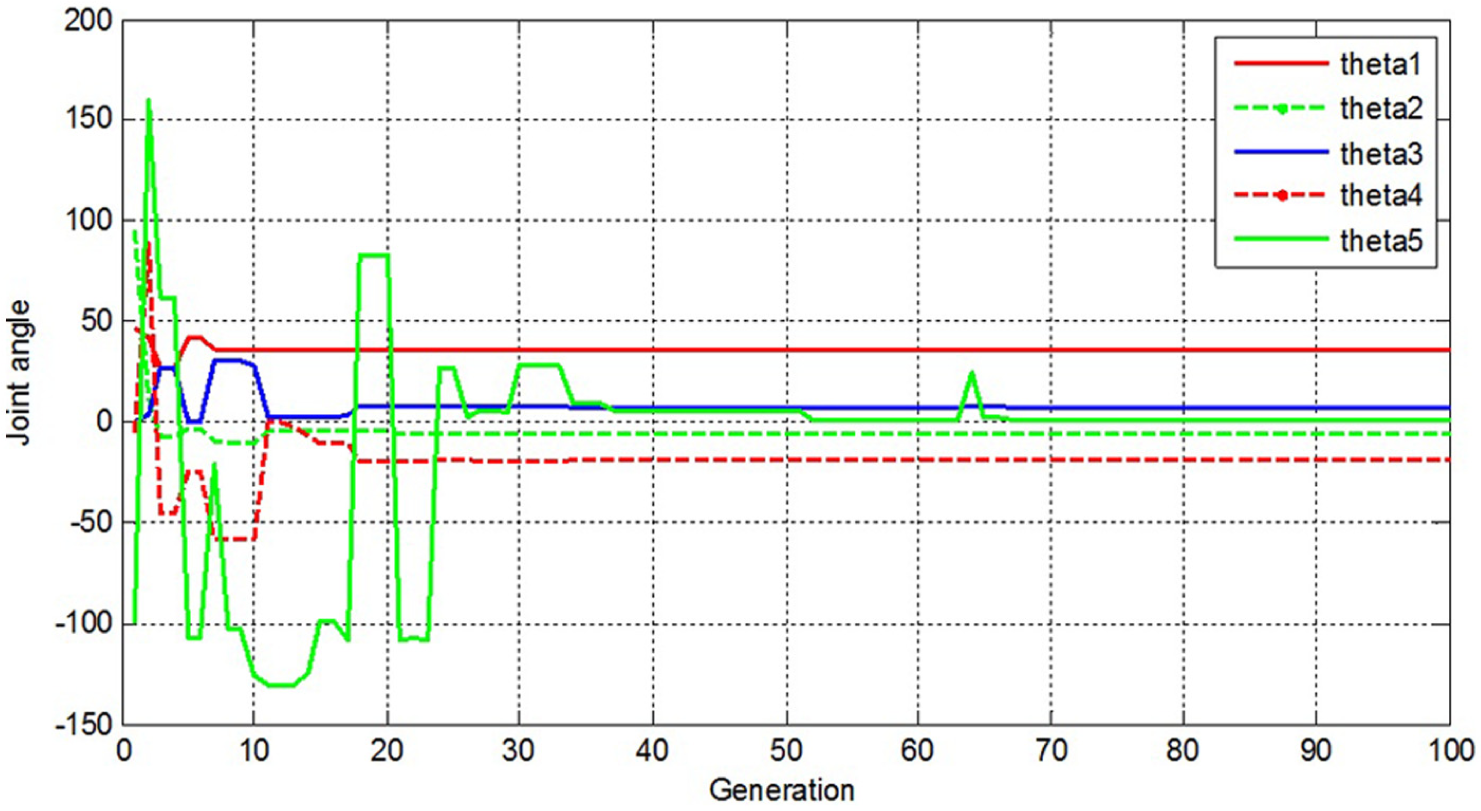
Joint trajectories of the 5-DOF robotic manipulator.

Position error of the robotic manipulator.
As shown in Figure 5, the position errors, including x, y, and z, are nearly converged to zero successfully. These experiments clearly indicate that the proposed SoPC-based AISTGA swarm intelligence resolves the redundant problem and finds the optimal joint configuration of the 5-DOF industrial robotic manipulator. Worthy of mention is that the proposed SoPC-based AISTGA solver provides a general approach for solving the inverse kinematics for high-DOF robotic manipulator. This approach is applicable to develop the redundancy solvers for any high-DOF robotic manipulators with different structures.
In order to exhibit the merit of the proposed SoPC-based AISTGA over conventional PSO and hybrid AIS to solve the redundant problem, Figure 6 presents the evolutions of performance index for the proposed SoPC-based AISTGA solver and the two conventional solvers. These three solvers employed the same fitness function in equation (12) to cope with the same inverse kinematics redundancy problem of the 5-DOF industrial robotic manipulator. As shown in Figure 6, the proposed SoPC-based AISTGA solver converges to the optimal solution with better performance index. Through these experimental results, the proposed SoPC-based AISTGA inverse kinematics solver is superior to the conventional solvers, namely, that it solves this robotic optimization problem more efficiently with better joint configurations.

The evolutions of performance index in the proposed SoPC-based AISTGA and conventional solvers.
Conclusion
This article has presented an efficient SoPC-based AISTGA swarm intelligence and its application to inverse kinematics redundancy solver of a 5-DOF industrial robotic manipulator in one FPGA chip. The AISTGA solver, motion profile, and controller are integrated in one FPGA chip. Through the experimental results, the proposed SoPC-based optimal solver has been shown to search for the optimal solutions successfully. This SoPC-based AISTGA solver has been shown to outperform the conventional solvers, such as geometric solver, Jacobian-based solver, PSO solver, and the hybrid AIS solver.
Footnotes
Academic Editor: Jianbo Yu
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors gratefully acknowledge financial support from the Ministry of Science and Technology, Taiwan, R.O.C., under grant MOST 104-2221-E-197-017.