In this article, we apply a relatively modified analytic iterative method for solving a time-fractional Fokker–Planck equation subject to given constraints. The utilized method is a numerical technique based on the generalization of residual error function and then applying the generalized Taylor series formula. This method can be used as an alternative to obtain analytic solutions of different types of fractional partial differential equations such as Fokker–Planck equation applied in mathematics, physics, and engineering. The solutions of our equation are calculated in the form of a rapidly convergent series with easily computable components. The validity, potentiality, and practical usefulness of the proposed method have been demonstrated by applying it to several numerical examples. The results reveal that the proposed methodology is very useful and simple in determination of solution of the Fokker–Planck equation of fractional order.
In this article, a sincere attempt has been taken to solve the nonlinear Riesz time-fractional Fokker–Planck equation (FPE) of the form
with the initial condition given by , where is the Riesz time-fractional derivative of order , is given analytic function on . In the whole article, is the set of natural numbers, is the set of real numbers, and is the gamma function. and are drift and diffusion coefficients, respectively. Here, is the parameter representing the order of fractional derivatives, which satisfies , and . When , the fractional equation reduces to the classical FPE.
FPE was introduced by Fokker and Planck,1 which is a mathematical model that arises in a wide variety of natural science, including solid-state physics, quantum optics, chemical physics, theoretical biology, and circuit theory. It has been commonly used to describe the Brownian motion of particles as well as the change of probability of a random function in space and time. Applications of FPE are widely in different branches of sciences and technology such as plasma physics, surface physics, population dynamics, biophysics, neuroscience, nonlinear hydrodynamics, pattern formation, psychology, and marketing.2 In recent past, Yildirim3 and Kumar4 have given the numerical and analytical approximate solutions of the FPE using homotopy perturbation method5–7 and homotopy perturbation transform method,8,9 respectively.
Recently, the authors used some novel method to solve fractional differential equations (FDEs).10 For other application of FDEs in the field of engineering, especially mechanics, see Yang et al.11 In this present analysis, we employ a relatively modified approach residual power series method (RPSM) to find an analytical and approximate solution of FPE. The RPSM12,13 is effective and easy for constructing power series expansion solutions for nonlinear equations of different types and orders without linearization, perturbation, or discretization. The main advantage of this method is the obtained solutions, and all their fractional derivatives are applicable for each arbitrary point and multidimensional variables in the given domain by choosing an appropriate initial guess approximation. Regarding the other aspect, the RPSM does not require any conversion while switching from the low order to the higher order and from simple linearity to complex nonlinearity.
The rest of this article is organized as follows: In the next section, we utilize some basic definitions of fractional calculus and theorem of power series expansions. In section “Construction of RPSM,” basic idea of the RPSM and its convergence analysis is presented. To determine the approximate solution for the Riesz time-fractional FPE, RPSM has been applied in section “Applications and numerical discussions.” Finally, section “Conclusion” concludes the whole article.
Mathematical preliminaries of fractional calculus and fractional power series
This section describes operational properties for elucidating sufficient fractional calculus theory, to enable us to follow the solutions of Riesz time-fractional FPE. In recent year, the FDEs have gained much attention due to the fact that they generate fractional Brownian motion, which is generalization of Brownian motion.14,15
Definition 1
A real function is said to be in the space if there exists a real number , such that , where , and it is said to be in the space if and only if .
Definition 2
The Reimann–Liouville fractional integral operator of the order of a function , , is defined as14,15
where is the set of positive real numbers.
Definition 3
The Riesz fractional derivative of the order of a function , , is defined as14–16
where , , and are the left- and right-hand side Reimann–Liouville fractional operators, respectively.
is called a multiple fractional power series (FPS) about , where is a variable and are functions of called the coefficients of the series.
Theorem 1
Suppose that has a FPS representation at of the form12
Furthermore, if are continuous on then the coefficient is given by the following formula
where ( times) and is the radius of convergence.
Construction of RPSM
In this section, we construct and obtain solution of fractional FPE by substituting its FPS expansion among its truncated residual function. From the resulting equation, a recursion formula for the computation of the coefficients is derived, while the coefficients in the FPS expansion can be computed recursively by recurrent fractional differentiation of the truncated residual function.
The RPSM consists in expression of the solution of equation (1) as multiple FPS expansions about the initial point . Let us consider the following form of the solution
In fact, satisfies the initial conditions of equation (1), so from equation (2), we obtain . Then, , and the initial guess approximation of can be written as
The RPSM provides an analytical approximate solution in terms of an infinite multiple FPS. However, to obtain numerical values from this series, the consequent series truncation and the practical procedure are conducted to accomplish this task. In the following step, we will let to denote the (k, l)-truncated series of . That is
where the indices counters and .
According to RPSM, for finding the coefficients in the series expansion of equation (5), we must define the residual function concept for equation (1) as
and the following (k, l)-truncated residual function
As described in El-Ajou et al.12 and Abu Arqub et al.,13 it is clear that for each , where is a nonnegative real number. In fact, this shows that for each and , since the Riesz fractional derivative of a constant function is zero. Again, the fractional derivatives for each and of and are matching at . Therefore, we have the following equation
To obtain the coefficients in equation (7), we can apply the following subroutine: substitute (v, w)-truncated series of into equation (7), find the fractional derivative formula of at , and then finally solve the obtained algebraic equation.
To summarize the computation process of RPSM in numerical values, we apply the following steps: at first, fix and run the counter to find (1, j)-truncated series expansion of suggested solution, and next, fix and run the counter to find (2, j)-truncated series and so on. Here, to find (1, 0)-truncated series expansion of equation (1), we use equation (5) and write
For finding the first unknown coefficient in equation (9), we should substitute equation (9) into both sides of the residual function that was obtained from equation (7), to obtain the following result
Depending on the result of equation (8) for , equation (10) gives . Hence, using the (1, 0)-truncated series expansion of equation (9), the (1, 0) residual power series (RPS) approximate solution for equation (1) can be expressed as
Similarly, to find out the (2, 0)-truncated series expansion for equation (1), we use equation (5) and write
Again, to find out the form of the second unknown coefficient in equation (12), we must find and formulate (2, 0) residual function based on equation (7) and then substitute the form of of equation (12) to find new discretized form of this residual function as follows
Using the fact that for from equation (8) and solving the resultant algebraic equation for , we obtain
Hence, using the (2, 0)-truncated series expansion of equation (2), the RPS approximate solution for equation (1) can be expressed as
This procedure can be repeated till the arbitrary order coefficients of the multiple FPS solution of equation (1) are obtained. But if there is a pattern in the series coefficients, then calculating few of the terms in series is sufficient to reach the solution.
In this part, we study the convergence of RPS through the given theorem.
Theorem 2
Suppose that has a FPS representation of the form , and . Then, we have
If , the series is everywhere convergent;
If , the series is absolutely convergent for all satisfying and is divergent for all satisfying ;
If , the series is nowhere convergent.
Proof 1
Let and . Since , there exist a natural number k such that for all or for all . Since is a convergent series of positive terms, by comparison test, is also convergent series. It follows that is absolutely convergent and hence convergent. As is arbitrary, the series is everywhere convergent.
. By Cauchy’s root test, the series is convergent if . Therefore if , the series is convergent, that is, the series is absolutely convergent. If , = . Let . Then, , and this implies . Consequently, , and it follows that is divergent.
If possible, let the series be convergent for . Then, . The sequence being a bounded sequence, there exists a positive real number B such that for all . This shows that the sequence is bounded sequence, and this contradicts that . Thus, the series is not convergent for . As is arbitrary nonzero real number, the series is nowhere convergent.
Applications and numerical discussions
The application problems are carried out using the proposed RPSM, which is one of the modern analytical techniques because of its iteratively nature. In this section, we consider the time-fractional FPE to show potentiality, generality, and efficiency of our method. Throughout this work, all the symbolic and numerical computations were performed by using MATHEMATICA 7 software package.
with the initial condition . The exact solution of the problem is given by for . According to equation (4) with , and considering and , the series solution of equation (17) can be written as
where is the initial guess approximation which is obtained directly from equation (3). Next, according to equations (5) and (7), the (k, 0)-truncated series of and the (k, 0)-truncated residual function of equation (17) can be defined and thus constructed, respectively, as follows
To determine the form of coefficient , in the expansion of equation (19), we should substitute the (1, 0)-truncated series into the (1, 0)-truncated residual function to obtain
Depending on the results of equation (8) in case of , one can obtain . Hence, the (1, 0)-truncated series solution of equation (17) could be expressed as
Again, to find out the form of the second unknown coefficient , we substitute the (2, 0)-truncated series solution into the (2, 0)-truncated residual function to obtain
Now, applying the operator one time on both sides of equation (23) and according to equation (8) for , we have . Therefore, the (2, 0)-truncated series solution of equation (17) is obtained, and one can collect the previous results to obtain the following expansion
As the former, by applying the same procedure for , and will yield after easy calculations to . Furthermore, if we collect all the final results, then the RPS solution of equation (17) can be constructed in the form of infinite series as follows
where , is the Mittag-Leffler function in one parameter. As a special case when , the RPS solution of equation (17) has the general pattern form which coincides with the exact solution of the standard FPE in terms of infinite series
The above result is completely in agreement with the Yildirim3 and Kumar.4
The geometric behavior of the solutions of equation (17) is studied next in Figure 1 by drawing the three-dimensional space figures of the (4, 0)-truncated series solution together with the exact solution on the domain . It is clear from the scenario of Figure 1 that Figure 1(a)–(d) is nearly coinciding and similar in behavior. Again to show the accuracy of the RPSM, we report absolute error in Figure 1(e). Of course, the accuracy can be improved by computing further terms of the approximate solutions using the present methods.
(a) Exact solution for equation (17), (b) the surface graph of the RPS approximation solution for equation (17) when , (c) the surface graph of the RPS approximation solution for equation (17) when , (d) the surface graph of the RPS approximation solution for equation (17) when , and (e) absolute error .
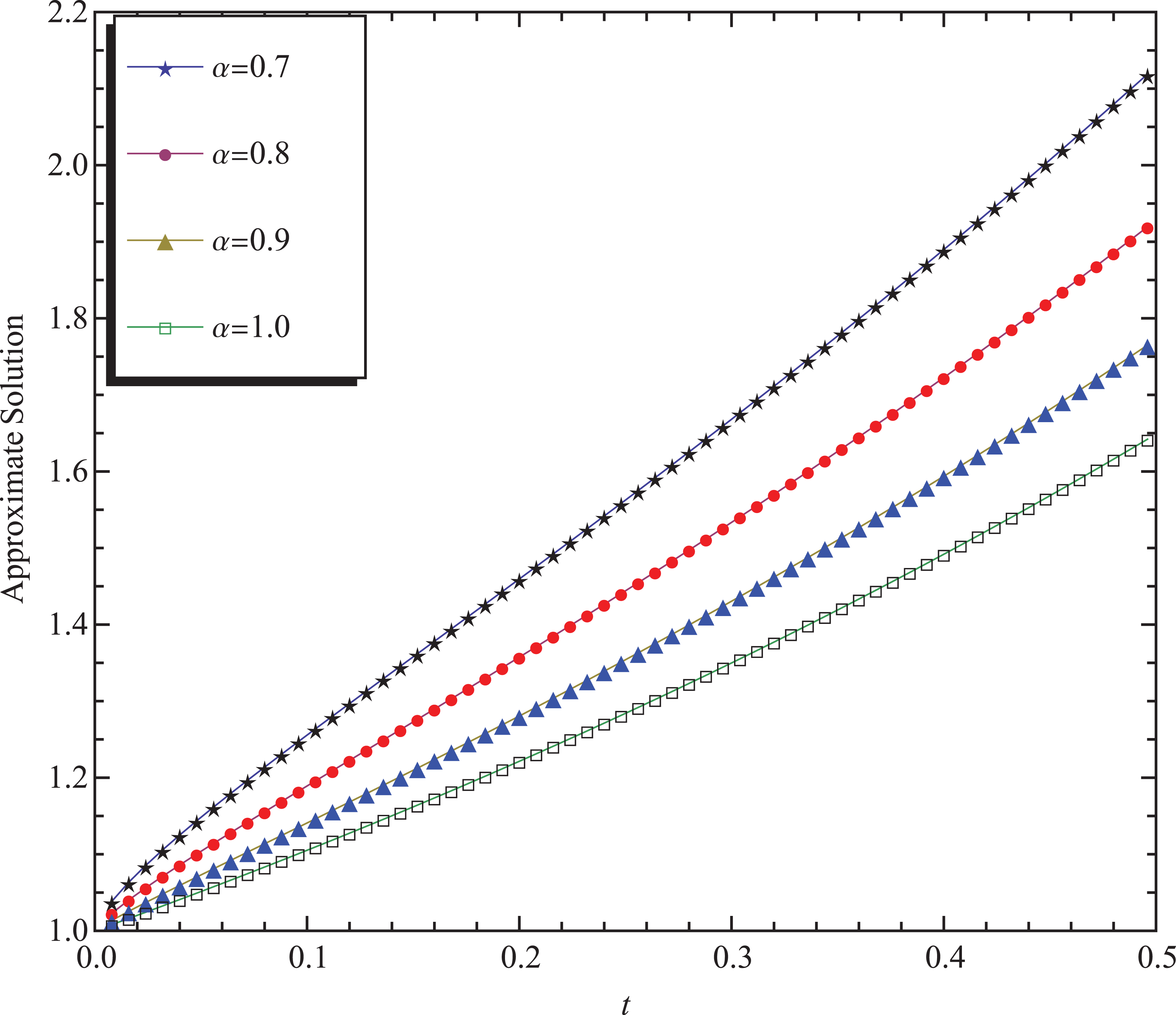
Figure 2 shows the evaluation results of the approximate analytical solution of equation (17) obtained by the RPSM for different fractional Brownian motions, that is, , and standard motions, that is, . Our solutions obtained by the proposed methods increase very rapidly with the increase in at .
Plot of versus time for different value of at x = 1.
with the initial condition . The exact solution of the problem is given by for .
According to equation (4) with and considering and , the series solution of equation (27) can be written as
where is the initial guess approximation which is obtained directly from equation (3). Next, the (k, 0)-truncated series of and the (k, 0)-truncated residual function that are derived from equations (5) and (7) can be formulated, respectively, in the form of the following
To determine the form of coefficient , in the expansion of equation (29), we should substitute the (1, 0)-truncated series into the (1, 0)-truncated residual function to obtain
Depending on the results of equation (8) in case of , one can obtain . Hence, the (1, 0)-truncated series solution of equation (27) could be expressed as
Again, to find , we substitute the (2, 0)-truncated series solution into the (2, 0)-truncated residual function to obtain
Now, applying the operator one time on both sides of equation (33) and according to equation (8) for , we have . Therefore, the (2, 0)-truncated series solution of equation (27) is obtained as follows
By applying the same procedure for , and , we can easily obtain the rest of . Using the above collected values of , the RPS solution of equation (27) can be constructed in the form of infinite series as follows
As a special case when , the RPS solution of equation (27) has the general pattern form which coincides with the exact solution of the standard FPE in terms of infinite series
However, the above result is same as the Yildirim3 and Kumar.4
In order to illustrate the behaviors of the RPS approximate solution of equation (27) geometrically, the approximate solution for has been depicted in three-dimensional space as shown in Figure 3 in addition to the exact solution when on the domain .
(a) Exact solution for equation (27), (b) the surface graph of the RPS approximation solution for equation (27) when , (c) the surface graph of the RPS approximation solution for equation (27) when , (d) the surface graph of the RPS approximation solution for equation (27) when , and (e) absolute error .
It is clear from Figure 3 that, on one hand, Figure 3(a)–d is nearly coinciding and similar in behavior, while, on the other hand, for the special case of Figure 3(a) and (b) is nearly identical and in excellent agreement with each other in terms of accuracy. As a result, one can achieve a good approximation with the exact solution using few terms only, and thus, it is evident that the overall errors can be made smaller by adding new terms of the RPS approximations. Furthermore, the accuracy of the proposed method for equation (27) is shown in Figure 3(e).
The behavior of the approximate analytical solution of equation (27) obtained by the RPSM for different fractional Brownian motions, that is, , and standard motions, that is, , is shown in Figure 4. It is seen from Figure 4 that the solution obtained by RPSM increases very rapidly with the increase in at .
Plot of versus time for different value of at x = 1.
with the initial condition . The exact solution of the problem is given by for .
According to equation (4) with and considering and , the series solution of equation (37) can be written as
where is the initial guess approximation which is obtained directly from equation (3). Next, the (k, 0)-truncated series of and the (k, 0)-truncated residual function that are derived from equations (5) and (7) can be formulated, respectively, in the form of
According to the RPSM and without the loss of generality for the remaining computations and results, the following are the first four unknown coefficients in the multiple FPS expansion of equation (38): , and . Therefore, the (4, 0)-truncated series solution of equation (37) can be written as
Consequently, the components of the RPS approximate solution are obtained as far as we wish. In fact, this series is exact to the last term, as one can verify, of the multiple FPS of the exact solution that can be collected to discover that the approximate solution of equation (37) has the general pattern form which coincides with the exact solution in terms of infinite series
However, the above result is in complete agreement with Yildirim3 and Kumar.4
Next, the geometrical behaviors of the RPS approximate solution of equation (37) are shown in Figure 5, which are nearly identical and in excellent agreement with each other. To measure the accuracy of the proposed method, we report the absolute error in Figure 5(e).
(a) Exact solution for equation (37), (b) the surface graph of the RPS approximation solution for equation (37) when , (c) the surface graph of the RPS approximation solution for equation (37) when , (d) the surface graph of the RPS approximation solution for equation (37) when , and (e) absolute error .
The behavior of the approximate analytical solution of equation (37) obtained by the RPSM for different fractional Brownian motions, that is, , and standard motions, that is, , is shown in Figure 6. It is seen from Figure 6 that the solution obtained by RPSM increases very rapidly with the increase in at .
Plot of versus time for different value of at x = 1.
Conclusion
In this article, the time-fractional FPE have been solved using RPSM. In order to show the effectiveness and leverage of the featured method, convergence analysis is presented. The numerical results obtained by RPSM for , and highly agree with the exact solution. Consequently, the present scheme is very simple, attractive, and appropriate for obtaining numerical solutions of time-fractional FPE. Therefore, without loss of generality, it can be conclude that the basic idea of the proposed method can be used to solve other nonlinear FDEs of different types and orders, as well as other scientific applications.
Footnotes
Academic Editor: Xiao-Jun Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: A.K. was financially supported by CSIR, New Delhi, India.
References
1.
RiskenH. The Fokker–Planck equation: method of solution and applications. Berlin: Springer, 1989.
2.
FrankTD. Stochastic feedback, nonlinear families of Markov processes, and nonlinear Fokker–Planck equations. Physica A2004; 331: 391–408.
3.
YildirimA. Analytical approach to Fokker–Planck equation with space- and time-fractional derivatives by means of the homotopy perturbation method. J King Saud Univ: Sci2010; 22: 257–264.
4.
KumarS. A numerical study for the solution of time fractional nonlinear shallow water equation in oceans. Z Naturforsch A2013; 68: 547–553.
HeJH. The homotopy perturbation method for nonlinear oscillators with discontinuities. Appl Math Comput2004; 151: 287–292.
7.
MomaniSOdibatZ. Homotopy perturbation method for nonlinear partial differential equations of fractional order. Phys Lett A2007; 365: 345–350.
8.
SinghJKumarDKumarS. New treatment of fractional Fornberg–Whitham equation via Laplace transform. Ain Shams Eng J2013; 4: 557–562.
9.
KumarSKumarAKumarD. Analytical solution of Abel integral equation arising in astrophysics via Laplace transform. J Egypt Math Soc2015; 23: 102–107.
10.
YangXYBaleanuD. Fractal heat conduction problem solved by local fractional variation iteration method. Therm Sci2013; 17: 625–628.
11.
YangXJBaleanuDKhanY. Local fractional variational iteration method for diffusion and wave equations on cantor sets. Rom J Phys2014; 59: 1–2.
12.
El-AjouAAbu ArqubOMomaniS. A novel expansion iterative method for solving linear partial differential equations of fractional order. Appl Math Comput, http://dx.doi.org/10.1016/j.amc.2014.12.121
13.
Abu ArqubOEl-AjouAMomaniS. Constructing and predicting solitary pattern solutions for nonlinear time-fractional dispersive partial differential equations. J Comput Phys2015; 293: 385–399.
14.
PodlubnyI. Fractional differential equations. New York: Academic Press, 1999.
15.
MillerKSRossB. An introduction to the fractional calculus and fractional differential equations. New York: Wiley, 1993.
16.
ShenSLiuFAnhV. The fundamental solution and numerical solution of the Riesz fractional advection-dispersion equation. IMA J Appl Math2008; 73: 850–872.