
Abstract
Driving characteristics of human drivers, such as driving safety, comfort, handiness, and efficiency, which are interrelated and contradictory, are synthetically considered to maintain a safe inter-vehicle distance in this article. For the multi-objective coordination control problem, the safety, handiness, comfort, and efficiency indicators are established via driving states and manipulated variable. Furthermore, a multi-performance indicator coordination mechanism is proposed via the invariant set and quadratic boundedness theory. A headway control algorithm for adaptive cruise control is established under the dynamic output feedback control framework. Finally, feasibility and effectiveness of the proposed algorithm are verified via closed-loop simulations under the following, cut-out, and cut-in typical operating conditions.
Introduction
On the basis of the traditional cruise control (CC) systems, adaptive cruise control (ACC) systems regulate vehicle longitudinal velocity based on the relative kinematics between the host vehicle and the preceding one and achieve the safe inter-vehicle distance (SIVD) maintenance. 1 With the development of vehicle safety technologies, ACC has become the focus in automotive safety research field. Starting in the late 1990s with luxury passenger cars, ACC functionality became available in a number of commercial passenger cars as well as lorries.
The headway control algorithms, as an important part of ACC systems, substitute drivers to determine the desired control commands guaranteeing a certain degree of car-following features. Two nonlinear spacing policies were designed and combined to gain better robustness. 2 The desired longitudinal acceleration profile was designed using an adaptive proportion integration differentiation (PID) controller for heavy-duty lorries. In order to achieve an all-range ACC, the unified pulse-width modulation (PWM) throttle signal was determined via the fuzzy control theory with range and range rate as inputs. 3 A linear quadratic (LQ) controller was designed to achieve a low-velocity headway control, and hydraulic torque converter dynamics was explicitly considered in the longitudinal dynamics controller in order to achieve the Stop&Go functionality. 4 A nonlinear range policy for improved traffic flow stability and string stability was proposed. The proposed range policy was obtained through an optimization procedure with traffic flow and stability constraints, and a complementary controller was designed based on the sliding mode technique. 5
While a human driver drives a car to follow a preceding vehicle, the manipulations contain the information perception of states of preceding vehicle and host one, the determination of desired headway and velocity, and the execution of desired throttle or brake. Recently, the car-following features of human drivers have increasingly been introduced into the headway control algorithms for ACC vehicles to improve drivers’ acceptability and system utilization rates and have become the research hotspots from related fields.
Specifically, manual driving data are collected and applied to the design of ACC algorithms via off-line statistic approaches or on-line intelligent self-learning approaches. Manual driving characteristics were investigated using real-world driving test data, and a vehicle ACC algorithm design with human factors considerations was presented. 6 A LQ controller was designed with the saturation of desired acceleration and velocity-dependent controller gains. The preceding vehicle acceleration is neglected for the nature of the control approach. However, it is important as the preceding vehicle acceleration is predicted and considered by human drivers in car-following while manual driving. A fully ACC system was developed based on driving data, ably reproducing human driving also in dense traffic conditions. 7 The control logic behind the ACC can be easily adapted to different drivers and/or different driving contexts; it can be calibrated on demand by just driving for a few minutes.
Another alternative approach simulating car-following characteristics of human drivers is to divide them into various sub-car-following features, which are interrelated and contradictory to some extent and includes safety, comfort, energy economy, and so on. And then the multi-objective decision approaches are introduced to coordinate them. From this perspective, the weights of the signals reflect the importance of corresponding performance indicator. For instance, the driving safety, tracking performance, and passenger comfort were represented with the states and control input. 8 Through quadratic boundedness (QB) theory,9,10 the determination of weights for indicators in the optimizing problem was transformed into the acquisition of the constraint bounds of them by collecting and analyzing the manual driving data. “Tight” and “loose” of the constraints correspond to “large” and “small” of the weights, respectively.
Along this way, in this article, comfort, safety, handiness, and efficiency indicators (EIs) are coordinated to simulate car-following characteristics of human drivers in the headway control algorithm via QB under the dynamic output feedback (DOF) control framework. Specifically, the car-following features are represented with inter-vehicle states and control input, and the ranges of them are determined by collecting and analyzing manual driving data. The inequalities about the car-following features can be transformed into linear matrix inequalities via QB theory. Furthermore, it is real-time for the off-line design of the algorithm, and it is robust as the preceding vehicle acceleration is viewed as bounded external disturbance rather than a constant. The bounds of the external disturbance can be reasonably set to achieve better anti-interference capability. Thus, the approach is advisable and apt to achieve in engineering.
The remainder of this article is structured as follows. The problem formulation is given in section “Problem formulation.” The design of the headway control algorithm based on QB theory under the DOF control framework is proposed in section “Design of headway control algorithm.” In section “Results,” the effectiveness of the designed algorithm and feasibility of coordinated multi-performance indicators are verified by simulations in typical operating conditions, such as following condition, cut-out condition, and cut-in condition.
Notation
For any vector x and matrix W,
Problem formulation
As illustrated in Figure 1, ACC systems consist typically of an information perception layer (IPL), a decision layer (DL), namely, headway control algorithm, and a control layer (CL). 11 The IPL gains vehicle status information from the host vehicle and driving environmental information from the road ahead and determines the target vehicle ahead. The DL determines longitudinal dynamics control commands, such as the desired longitudinal acceleration profile, on the basis of inter-vehicle distance, relative velocity, and so on. The CL ensures tracking of this profile precisely via actuation of the throttle and brake systems with considerations of vehicle longitudinal dynamics features (such as the anti-dragged brake performance of engine).

Schematic representation of ACC system and headway control algorithm based on QB theory.
As Figure 2 shows, the point behind the preceding vehicle with a distance of SIVD is defined as the equilibrium point, whose velocity and acceleration equal those of the preceding vehicle.

Definition of the relative kinematics between the preceding vehicle and the host one.
In this section, the vehicle-following Takagi–Sugeno (T-S) fuzzy model for the relative kinematics between the preceding vehicle and the host one is established first. Then, the multi-performance indicators of ACC systems are quantified with model states and manipulated variable. The design of headway control algorithm is transformed into the stabilization of the T-S fuzzy system with constraints on states and manipulated variable.
Vehicle-following T-S fuzzy model
According to the inter-vehicle distance, the relative velocity between the preceding vehicle and the host one, and the longitudinal dynamics characteristics of the host vehicle, the vehicle-following model is established as follows

in which
As equation (1) is a nonlinear system dependent on the velocity of the host vehicle, it cannot be directly stabilized by the control law from the existing linear system control concept. Fuzzy control theory is an effective way to stabilize the nonlinear systems. The T-S fuzzy model is regarded as a universal approximator of the nonlinear systems. 13
Specifically,
Plant rule 1:
If
Then
Plant rule 2:
If
Then
where
The membership functions of the fuzzy sets are

where


The membership functions
The defuzzification is carried out as

The measured output equation is complemented as

where
Considering that the QB algorithm is usually implemented in a discrete-time domain, equation (2) is discretized via Euler’s approach with a specified sampling time of

where
Quantification of multi-performance indicators
Four performance indicators, as represented in Figure 1, safety indicator (SI), comfort indicator (CI), handiness indicator (HI), and EI are quantified as follows:
SI
The driving safety is typically related to the inter-vehicle distance and relative velocity of the vehicles.
14
Thus,
On the other hand, if the host vehicle is at the equilibrium point and
CI
ACC systems are primarily comfort systems that incorporate safety in the sense that appropriate driving actions within surrounding traffic are ensured,
14
where
HI
The increment of control order (throttle/brake signal) reflects HI. The increment of u or throttle/brake signal is represented with
EI
The EI reflects the following behavior features of human drivers and shows potential capacities of vehicles controlled by ACC systems.
In order to improve the overall performance of ACC systems via the coordination of the above performance indicators, the range of each performance indicator is represented with constraints on states and manipulated variable as follows:
State constraint:
Control constraint:
where
Design of headway control algorithm
As previously mentioned, the multi-performance indicators are quantified with states and manipulated variable of equation (3), and the ranges of each performance indicator are represented with constraints on states and manipulated variable. The design of headway control algorithm is transformed into the stabilization of the vehicle-following T-S fuzzy model (3) with constraints on states and manipulated variable.
It is known that the cost of measurement of the longitudinal acceleration is high for commercial passenger cars. In view of this, a DOF controller is adopted to compute the manipulated variable. Through parallel distributed compensation (PDC) technology, 17 the DOF controller is governed by

where

where
As to the current problem, the QB theory is introduced to stabilize the states of equation (3) with constraints into an ellipsoid invariant set determined with a common Lyapunov function under DOF control framework.
The vehicle normal driving set
To this end, a minimum invariant set containing reachable set needs to be searched. The invariant set has an ellipsoid shape
According to the QB theory,9,17 if a common Lyapunov function

By invoking the S-procedure and applying the Schur complement, the property is satisfied if and only if

Partition
By deviation, one can obtain

where
Furthermore, the gains of DOF controller can be obtained from equation (7) if equation (8) is feasible. The states of the closed-loop system (5) can be guaranteed to converge into the neighborhood next to the equilibrium point asymptotically.
In order to improve the overall performance of ACC systems, multi-performance indicators have got to be considered in the design of DOF controller in terms of constraints on states and manipulated variable as defined in section “Quantification of multi-performance indicators.”
For a pre-specified
Define


Using the Schur complement, the above inequalities are equivalent to

in which
where
Similarly, the control constraint is satisfied if

In brief, if equations (9) and (10) are feasible, then, for all allowable
Results
As Figure 4 shows, there are three typical operating conditions for ACC vehicles on the straight lanes: the following condition, the cut-out condition, and the cut-in condition. In this section, the effectiveness and feasibility of the designed headway control algorithm (simply notated by dynamic output feedback–quadratic boundedness (DOF-QB)) are verified via simulations in the typical operating conditions. In the simulations, the dynamics model of a domestic passenger car and the testing simulation platform, such as radar sensor and identification of effective objectives and so on, are established in CarSim software. The DOF-QB and the inverse longitudinal dynamics model for throttle/brake (CL) are set up in MATLAB/Simulink©.
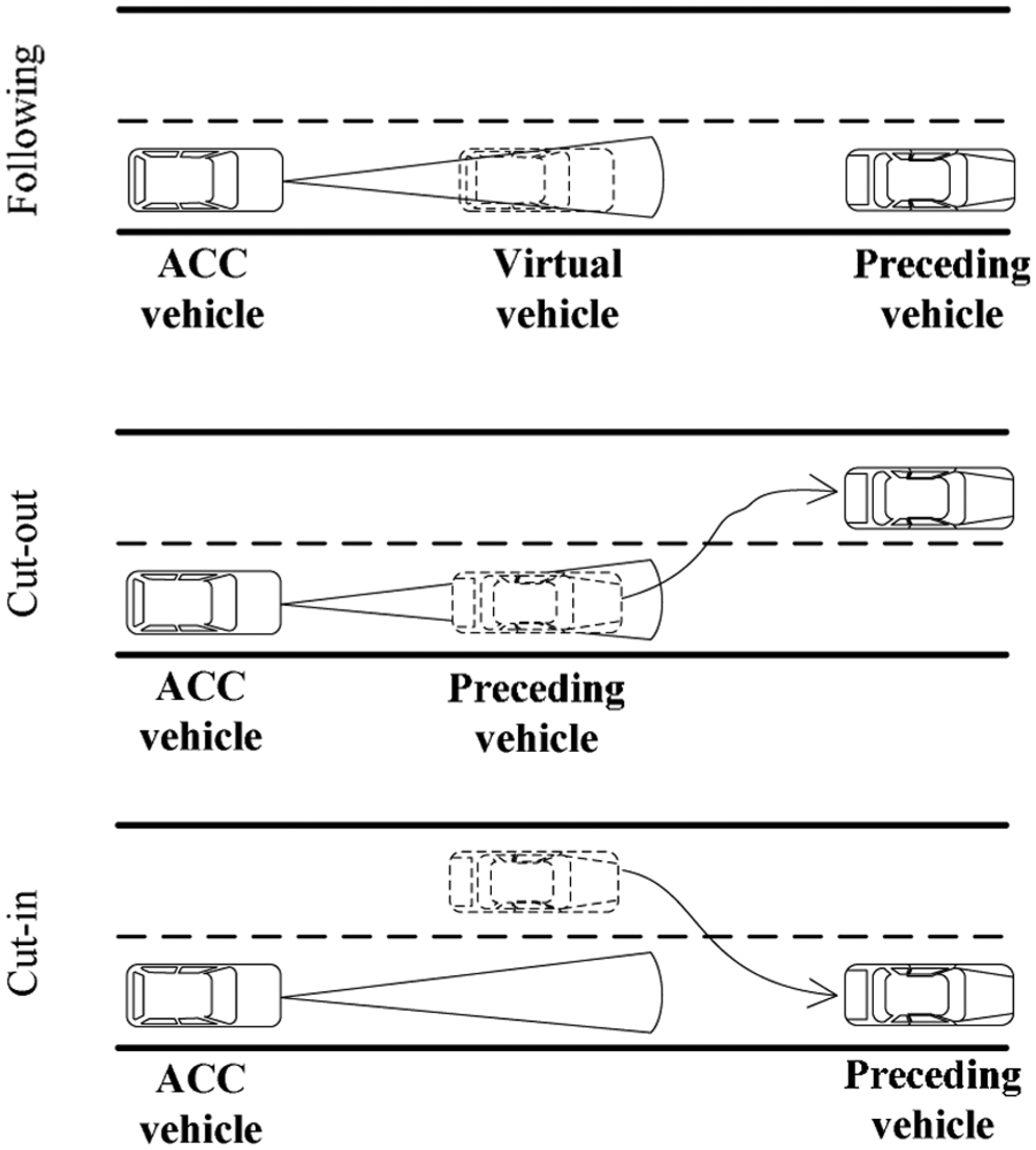
The typical operating conditions of ACC systems.
For the integrity of the ACC systems, a CC mode is complemented and the switch logic between the CC mode and the ACC mode is designed. In the CC mode, a virtual preceding vehicle is established. The velocity of the virtual vehicle and the SIVD are identical to the cruise velocity 110 km/h and the CTH policy
Basically, LQ control theory has been used to design the desired acceleration in normal preceding vehicle-following situations in previous literatures4,6 By optimizing a cost function under constraints on states in LQ control, multi-performance indicators are coordinated and a synthetical performance of the closed-loop system is guaranteed. Thus, the LQ controller is more suitable for the comparison algorithm of DOF-QB. The CTH policy is applied in the LQ algorithm,

where
The gains for the state feedback law,

in which, the weighting matrices,
Key parameters.

SIVD: safe inter-vehicle distance; CL: control layer; IPL: information perception layer.
Following condition
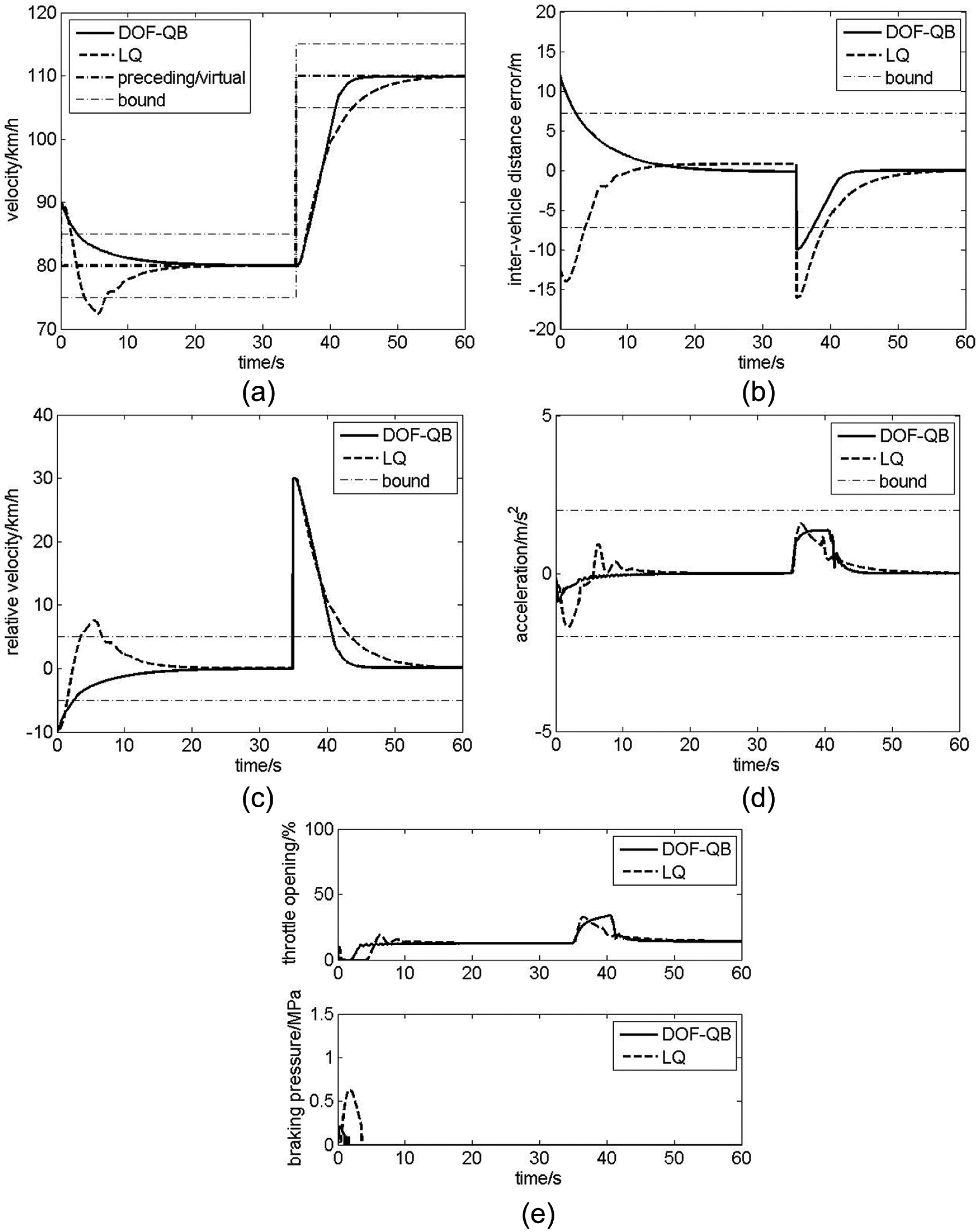
While a slower vehicle ahead of the host one in the same lane runs into the detection region of the radar (100 m) and then the preset inter-vehicle distance is achieved, the host vehicle regulates its velocity to maintain the SIVD. This operating condition is called the following condition. The specific condition is as follows: the initial velocity of the host vehicle is 110 km/h. A distance of 150 m ahead of the host vehicle, the preceding vehicle runs with an initial speed of 90 km/h, accelerates to 100 km/h with a rate of 1 m/s2 from 40 to 42.78 s, and drives with this constant velocity in the rest of the simulation time. The simulation results are shown in Figure 5.

Following condition simulation curves.
As shown in Figure 5, the whole experiment results contained three stages: a cruise stage, a transient following stage, namely, the transient process from the CC mode to the ACC mode, and a steady following stage. In the cruise stage from 0 to 16 s, the inter-vehicle distance error, relative velocity, and the acceleration are almost zero. This shows that the virtual objective is tracked steadily with no overshoot by the two algorithms.
In the transient following stage, the control objective of the host vehicle is transformed to a real preceding vehicle. As shown in Figure 5(a) and (c), the host vehicle velocity converges to 0 km/h asymptotically in DOF-QB, while in LQ it has an overshoot and vibrates frequently. Furthermore, the setting time in LQ is obviously larger than that in DOF-QB, as given in Table 2. Thus, the EI in DOF-QB is superior to LQ. Although the initial inter-vehicle distance error in DOF-QB is far greater than that in LQ, the inter-vehicle distance error in LQ, as illustrated in Figure 5(b), has an overshoot of −14 m. Figure 5(d) shows that the acceleration range in DOF-QB is smaller than that in LQ significantly; thus, the CI is improved by DOF-QB compared to LQ. Accordingly, the braking pressure (namely, the brake master cylinder pressure) maximum in LQ is larger than that in DOF-QB, as shown in Table 2 and Figure 5(e), and the host vehicle decelerates for a longer time of duration in LQ.
Results of transient stage in following condition.

DOF-QB: dynamic output feedback–quadratic boundedness; LQ: linear quadratic.
In the steady following stage, as shown in Figure 5(a) and (c), the relative velocity fluctuates frequently and exceeds the preset constraint bounds in accelerating process in LQ and thus has a worse SI compared to that in DOF-QB. Although the inter-vehicle distance errors in both DOF-QB and LQ are constrained in the preset constraint bounds as shown in Figure 5(b), the inter-vehicle distance error in LQ vibrates around zero. Correspondingly, the integration of the acceleration in the time axis in DOF-QB is much smaller than LQ as illustrated in Figure 5(d). Thus, the energy consumption is reduced in DOF-QB and the frequent actions of throttle speed up mechanical wear of the actuator in LQ.
Cut-out condition
In the ACC mode, the preceding vehicle may accelerate and exceed the preset cruise velocity or exit the lane, and the host vehicle quits the ACC mode and enters into the CC mode. This is called the cut-out condition. The specific condition is set up as below: The initial velocity of the host vehicle is 90 km/h and the host vehicle is originally in the ACC mode. Ahead of the host vehicle, the preceding vehicle drives with a constant velocity of 80 km/h and the initial inter-vehicle distance is 40 m. From 30 s, the preceding vehicle starts to change lane to the adjacent lane.
The simulation contained two stages: as illustrated in Figure 6(a), a steady following stage from 0 to 35 s and a transient following stage from 35 s to the end. It is necessary to illustrate that, in the steady following stage, the inter-vehicle states are out of the constraint bounds in both algorithms at the beginning for different initial inter-vehicle distance error. After a short time, as shown in Figure 6(b) and (c), the inter-vehicle states are regulated into the preset constraint bounds till the equilibrium points in both algorithms. However, Figure 6(c) shows that the relative velocity in LQ has an overshoot of 7.9 km/h, while that in DOF-QB converges to 0 asymptotically. The CI in LQ is lower than that in DOF-QB for the several vibrations of acceleration in LQ as illustrated in Figure 6(d). Furthermore, the HI in LQ is worse than DOF-QB for the frequent actions of throttle actuator as shown in Figure 6(e).
Cut-out condition simulation curves.
From 35 s, the host vehicle enters into the transient stage in both algorithms, transiting from ACC mode to CC mode. As shown in Figure 6(a), the host vehicle velocities in both algorithms converges to the cruise velocity asymptotically, while the setting time of host vehicle velocity in LQ is about 4 s longer than that in DOF-QB. Thus, the EI is improved by DOF-QB compared to LQ. As illustrated in Figure 6(d), the maximum accelerations in LQ and DOF-QB are 1.58 and 1.36 m/s2, respectively. Thus, the passenger comfort in DOF-QB is better.
Cut-in condition
The cut-in condition is defined as follows: the host vehicle is in the CC mode or ACC mode initially. A vehicle ahead in the adjacent lane merges abruptly into the lane of the host vehicle and enters into the detection region. The host vehicle is initially in the CC mode in the context. The specific condition is as follows: a vehicle drives onward with a constant velocity 80 km/h and the initial inter-vehicle distance is 160 m in the adjacent lane. It begins to change lane to its adjacent lane from 10 s, and it enters into the detection region of the radar around 12 s. The host vehicle enters into the ACC mode and takes action to avoid possible rear-end collision.
The shape of the simulation curves is similar to the curves of following condition in section “Following condition.” Exactly, the experiments underwent the transient stages, while a preceding vehicle was confronted in the detection region and the host vehicle decelerated and entered into the steady following stage. But the cut-in condition was more emergent in comparison with the following condition.
As shown in Figure 7(a), for the emergent condition, there exists certain overshoot in the host vehicle velocity in both algorithms. The overshoot in LQ is far larger than that in DOF-QB and exceeds the preset constraint bounds as also illustrated in Figure 7(c). Figure 7(b) shows that although this condition is relative emergent, the inter-vehicle distance error converges into the constraint bounds faster till the equilibrium with no overshoot in DOF-QB. Comparing Tables 2 and 3, the overshoots of inter-vehicle states in LQ in cut-in condition are significantly larger than those in following condition, while the overshoots in DOF-QB are small enough in the preset safety constraint bounds. Furthermore, in the tables, the accelerations ranges in cut-in conditions are broader than those in following condition, and the maximum acceleration in LQ is up to 2 m/s2 and achieves the preset comfort upper bound in cut-in condition. This verifies that LQ algorithm is more aggressive than DOF-QB. As shown in Figure 7(d) and (e), the minimum accelerations in both algorithms are almost uniform, while the braking time is longer in LQ.

Cut-in condition simulation curves.
Results of transient stage in cut-in condition.

DOF-QB: dynamic output feedback–quadratic boundedness; LQ: linear quadratic.
Discussion
A human-centered headway control algorithm for ACC vehicles has been proposed in this article. The car-following performance of ACC has been improved from the results above. However, it is still difficult to accurately and comprehensively simulate car-following characteristics of human drivers for the large variability of drivers’ states of mind. Therefore, for the practical implementation of the proposed algorithm, many questions remain:
How could different constraints on the performance indicators be dealt with via QB theory? The preferences and attitudes of human drivers and the operating conditions are varying in car-following while driving by human drivers. Thus, the constraints on the indicators should be changed accordingly. Furthermore, in this article, the bigger value between the largest value and the absolute value of the smallest value is presented as the constraint on the indicator. It is not practical to some extent for the symmetrical constraints.
How could the vehicle-following T-S fuzzy model be sufficient in both high-speed and low-speed? In this article, the T-S fuzzy model is established based on the host vehicle velocity, ranging from 0 to 120 km/h. It seems conservative to represent the full-range operating conditions. Maybe the host vehicle velocity can be divided into two parts: [0, 40] km/h for low speed and [40, 120] km/h for high speed. To improve the transition of between them, an intermediate mode should be designed.
Conclusion and future works
The headway control algorithm is designed using the QB theory under the DOF control framework to coordinate multi-performance indicator representing the driving characteristics in this article. Simulation results show that DOF-QB algorithm gets the advantage over LQ algorithm under the same constraints on states and manipulated variable. Specifically, the SI of the designed algorithm is smaller and especially the relative velocity of it does not exceed the preset constraint bounds, and the other is the opposite in all the conditions. Furthermore, the efficiency of the designed algorithm is better as the set times of inter-vehicle distance error and relative velocity of the designed algorithm are shorter. The acceleration of the designed algorithm is smoother and fluctuates less; thus, the comfort and handiness of it are optimal.
Future research will focus on the on-the-road experiments of the designed algorithm in different operating conditions. Furthermore, based on the work of this article, headway control algorithm satisfying the preferences and attitudes of different drivers and adaptive to various operating conditions will be studied in the future work.
Footnotes
Academic Editor: Ling Zheng
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article is supported by Specialized Research Fund for the Doctoral Program of Higher Education (20120061110028) and Jilin Provincial Research Foundation for Technology guide (20130413058GH), P.R. China.