
Abstract
With the high fuel prices, the demands for energy saving and green emission of engineering machinery have been increased rapidly. Due to the complex working condition and frequent load changing, the efficiency of the hydraulic excavator is low. The aim of this article is to propose a control strategy for energy recovery system of hydraulic excavator driven by the parallel hybrid system. The mathematical models of the main components and the simulation models of the proposed system and a conventional energy recovery system are built. Then, according to the load characteristic, a control strategy based on the working condition and state of charge of the battery is given. The co-simulation for the hybrid hydraulic excavator system is established. The results show that the proposed energy recovery system and control strategy can not only improve the energy recovery efficiency but also reduce fuel consumption and emission of the power system.
Introduction
Energy is consuming up and pollution is more and more serious in the world. With the development of world economic construction, engineering machinery play an important role in construction. As one of the most typical equipments of engineering machinery, the demand of hydraulic excavator is increasing rapidly. However, only 20% of the engine output power is utilized in a conventional-type excavator. 1 The excess energy is converted into heat in the main throttle valve, which is the main reason for the low efficiency of the conventional hydraulic excavator.
Energy saving is an effective method to improve the efficiency of the hydraulic excavator. So, research on the energy saving of hydraulic excavators is very necessary and urgent. Ho and Ahn 2 proposed a novel hydraulic energy-regenerative system for excavator based on a closed-loop hydrostatic transmission hydraulic accumulator, and the results indicated that the recovery efficiency of the designed system varied from 22% to 59%. Liu and Yao 3 presented an improved way to coordinately control the five independent valves of excavator by incorporating the off-side pressure dynamics into the controller design. Energy recovery is another energy-saving method which can be realized using hydraulic or electrical energy storage devices. 4 The excess energy is converted to hydraulic or electrical form and stored in the energy storage unit. However, it needs additional components such as hydraulic pump/motors or transformers to reuse the recovered energy.
Hybrid is a new power system which can be assigned to series hybrid, parallel hybrid, or their combination. It is widely used in automotive industry. To capitalize on the benefits of using plug-in hybrid electric vehicles (HEVs), an intelligent energy management system 5 was developed, and the evaluation results demonstrated that the proposed energy management system is capable of improving the fuel efficiency of the vehicle. A fuzzy logic control was utilized to design energy management strategies for fuel battery hybrid vehicle.6–8 Based on the cerebellar model articulation controller and radial basis function neural networks, Taghavipoura et al. 9 proposed an optimal control strategy for a split parallel HEV. The hybrid system can thoroughly optimize the two energy configurations and take advantage of the benefits provided by them. 10 Therefore, compared with the traditional vehicle, HEV not only has a potential to improve the fuel efficiency but also reduces the emission.
Based on the successful application of the hybrid system in automotive industry, it attracts a great interest of companies and institutes in the world. Many researches on the application of the hybrid technology in hydraulic excavator have been done. Yoon et al. 11 presented a new energy-saving hybrid excavator using an electro-hydraulic circuit design driven by an electric motor/generator for the generation of potential energy. Wang et al. 4 analyzed the boom control performance of the hybrid hydraulic excavator with a potential energy recovery system. The experiment results show that the proposed control scheme can recover the potential energy of the boom effectively with acceptable control performance.
Recently, research on the control strategy and hybrid system in hybrid vehicle has been carried out.10,12–15 However, compared with hybrid vehicle, the working condition of hydraulic excavator varies periodically in a large range. Control strategy applied to hybrid vehicle successfully is not suitable for hybrid hydraulic excavator.
This article mainly proposed a control strategy for a hybrid hydraulic excavator energy recovery system which combines the hydraulic accumulator and the electric regeneration unit together. The proposed system is simulated by AMESim software. The energy recovery efficiency of the proposed system is clearly verified through simulation results in comparison with the conventional energy recovery system. Based on the working condition and state of charge (SOC) of the battery, the control strategy designed for the hybrid excavator with the energy recovery system can reduce fuel consumption and emission of the power system. The efficiency of the hydraulic excavator is significantly improved.
This article is organized as follows: section “Structure of the energy recovery system” is devoted to the structure and working process of the proposed energy recovery system. The mathematical models of the main components in the proposed system are built in section “Mathematical modeling.” The simulations of the proposed and conventional energy recovery system are demonstrated in section “Simulation of the boom energy recovery system.” Section “Control strategy for the hybrid power system” presents a novel control strategy based on the working condition and SOC of the battery, and the co-simulation model of the whole system is also presented in this section. Finally, conclusions are provided in section “Conclusion.”
Structure of the energy recovery system
A new boom potential energy recovery system needs to be designed to satisfy the following requirements: 15
Operation of the new boom energy recovery system must be similar to the conventional hydraulic excavator.
The new boom energy recovery system must achieve higher working efficiency and save more energy when compared with the conventional energy recovery system.
Figure 1 presents the schematic diagram of the proposed boom potential energy recovery system for hybrid hydraulic excavator. It mainly consists of oil supply system, boom cylinder, control valves, and energy regeneration unit. The pump is driven by the engine and the motor. The pressure oil exporting from the pump was supplied to the boom cylinder system. When the boom cylinder piston is contracting, the excess energy is converted into electrical energy and stored in the battery.

Schematic diagram of the proposed boom energy recovery system.16
Compared with the engine power Pe , the motor power Pm , and the load power Pl , there are three kinds of working conditions based on the load change: 15
When Pe > Pl , the pump is driven by the engine, and the excess power of the engine is converted into electrical energy by the motor and stored in the battery. The motor works as a generator in this working condition.
When Pe < Pl , electrical energy stored in the battery is used to drive the motor. The engine and the motor drive the pump together.
When the motor power Pe > Pm > Pl , the pump is driven by the motor independently, and the engine works in the idle state.
Mathematical modeling
Engine
Figure 2 shows the speed characteristics of engine in the different control positions. It can be expressed by


Speed characteristics of engine.
where Te
and ne
are output torque and speed of the engine, respectively, and
In order to control the engine, speed characteristic of the engine can be divided into external characteristic and regulating characteristic. External characteristic is matched by quadratic curve

where
When the engine is in a state of speed regulation, the characteristic equation can be matched by a straight line. Assuming that the slope of speed characteristic curve in the different positions of the control rod does not change, the mathematical model of speed characteristic is given by


where nH
and nL
are the largest and lowest idle speeds of engine, respectively;
According to the equations above, the speed of the engine can be adjusted within the scope of its external characteristic.
Battery
This article mainly studies the charge and discharge performance of the battery. So, the model of battery is simplified and shown in Figure 3.
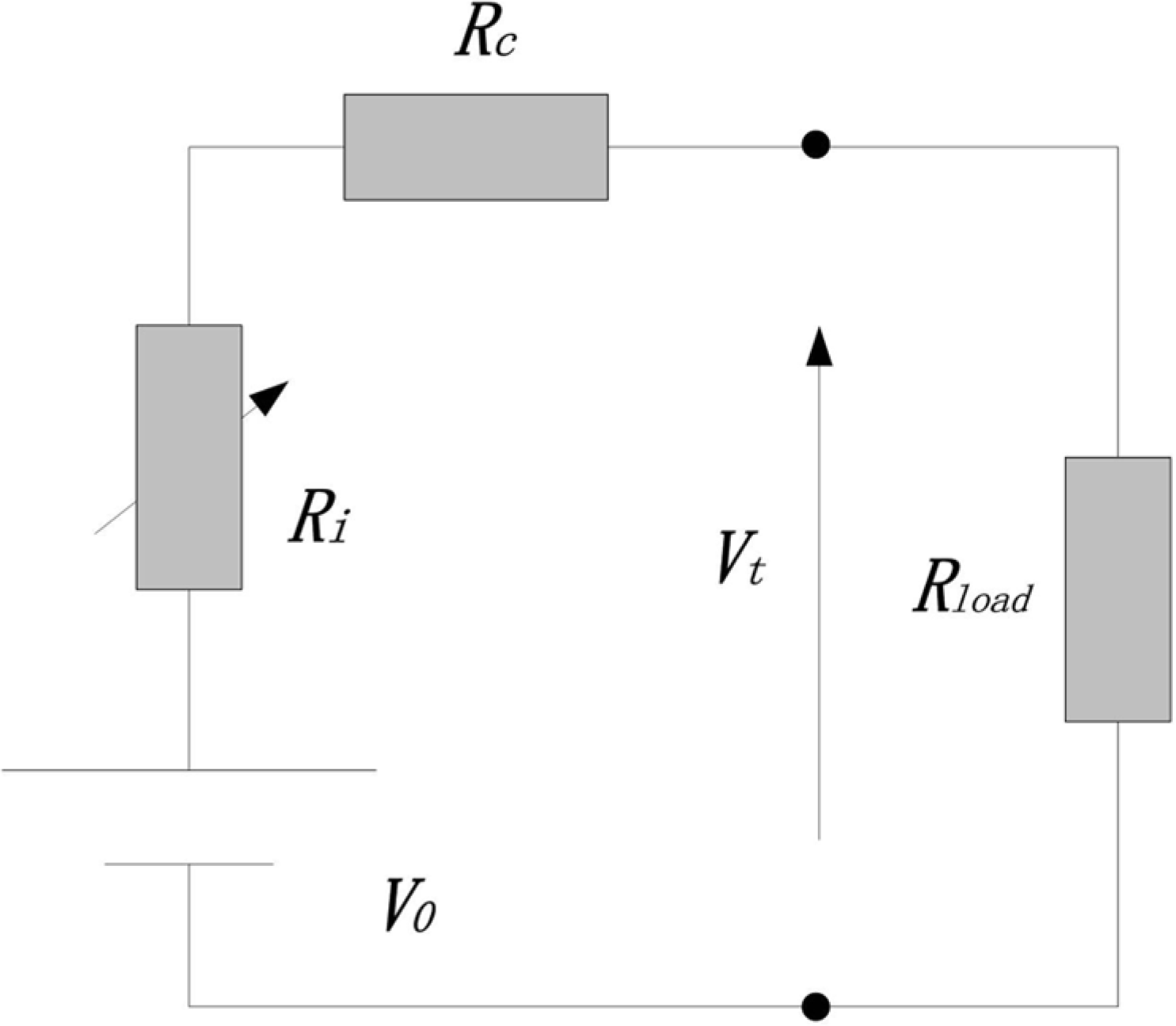
Battery model.
SOC of the battery is given by

where
SOC of the battery with the constant current discharge is expressed by

where
Boom cylinder
As shown in Figure 1, the dynamics of the piston of the boom cylinder16 can be expressed as

Continuity equation of hydraulic cylinder piston can be expressed as

where M is the equivalent mass of the load; vc is the velocity of the piston; Fl is the external force; P 1 and P 2 are the pressures in the large and small chambers of the boom cylinder, respectively; Q 1 and Q 2 are the corresponding flow rates; A 1 and A 2 denote the corresponding working areas; Fc is the coulomb friction force; and bc is the combined coefficient of damping and viscous friction forces on the load and the rod. The value of vc is the differential of the piston displacement xc .
Hydraulic motor
The dynamics of the rotor of the regeneration unit can be expressed as 15

where
Flow continuity equation of the motor can be written as

where Cem is the external leakage coefficients of the motor, and Cim is the internal leakage coefficient of the motor.
Assuming that there is no loop loss in reversing valve, the flow equation of the chamber between the cylinder and the motor can be written as

where Cic
is the internal leakage coefficients of the cylinder, Cec
is the external leakage coefficient of the cylinder, V is the volume of the hydraulic oil between the boom cylinder and motor, Qa
is the flow of the hydraulic oil stored in the accumulator, and
Hydraulic accumulator
The bladder accumulator is chosen in this boom energy recovery system. 15 According to Boyle’s law, the formula is given by

where p 0, p 1, p 2, and pa denote the initial aeration pressure, initial pressure, terminal state pressure, and free state pressure of accumulator, respectively; V 0, V 1, V 2, and Va are the initial aeration volume, initial volume, terminal state volume and free state volume of accumulator, respectively; and n is the air polytropic exponent.
pa
and Va
are the random operating states of accumulator, and the equality of

Flow and air chamber volume of accumulator are Qa and Va , respectively, and the inlet flow rate of accumulator is given by

Energy equation of the accumulator is

Simulation of the boom energy recovery system
In order to verify the energy recovery efficiency of the proposed system, simulations with the proposed accumulator–generator system and the conventional energy recovery system have been carried out using AMESim software as shown in Figure 4. The main setting parameters for the AMESim models are given in Table 1.

AMESim model of the proposed system.
Setting parameters for the two AMESim models.

Control strategy for the hybrid power system
Principle of the control strategy
Due to the complex working condition and frequent load changing, the battery of the proposed energy recovery system switches between the charge and discharge states frequently. Therefore, SOC of the battery is deviated from the ideal area.
According to the control principle of the hybrid system, a new control strategy based on the working condition and SOC of the battery is proposed. Based on the energy distribution of the power system in hybrid hydraulic excavator, the working mode is divided into motor mode, engine mode, and hybrid mode.
Motor mode. When the load power is smaller than the rated power of the engine and the electrical energy stored in the battery is enough to drive the motor, the thermal efficiency of the engine is low. So, the engine works in the idle state. The load is driven by motor solely.
Engine mode. When SOC of the battery is less than the minimum threshold, or the load power is close to the rated power of the engine, the load is only driven by engine. The excess power of the engine is converted to electrical energy and stored in the battery.
Hybrid mode. When the load power is greater than the rated power of the engine, or the electrical energy stored in the battery is enough to drive the motor, the load is driven by the engine and motor together.
The flowchart of control strategy for the parallel hybrid power system is shown in Figure 5. Based on the load power
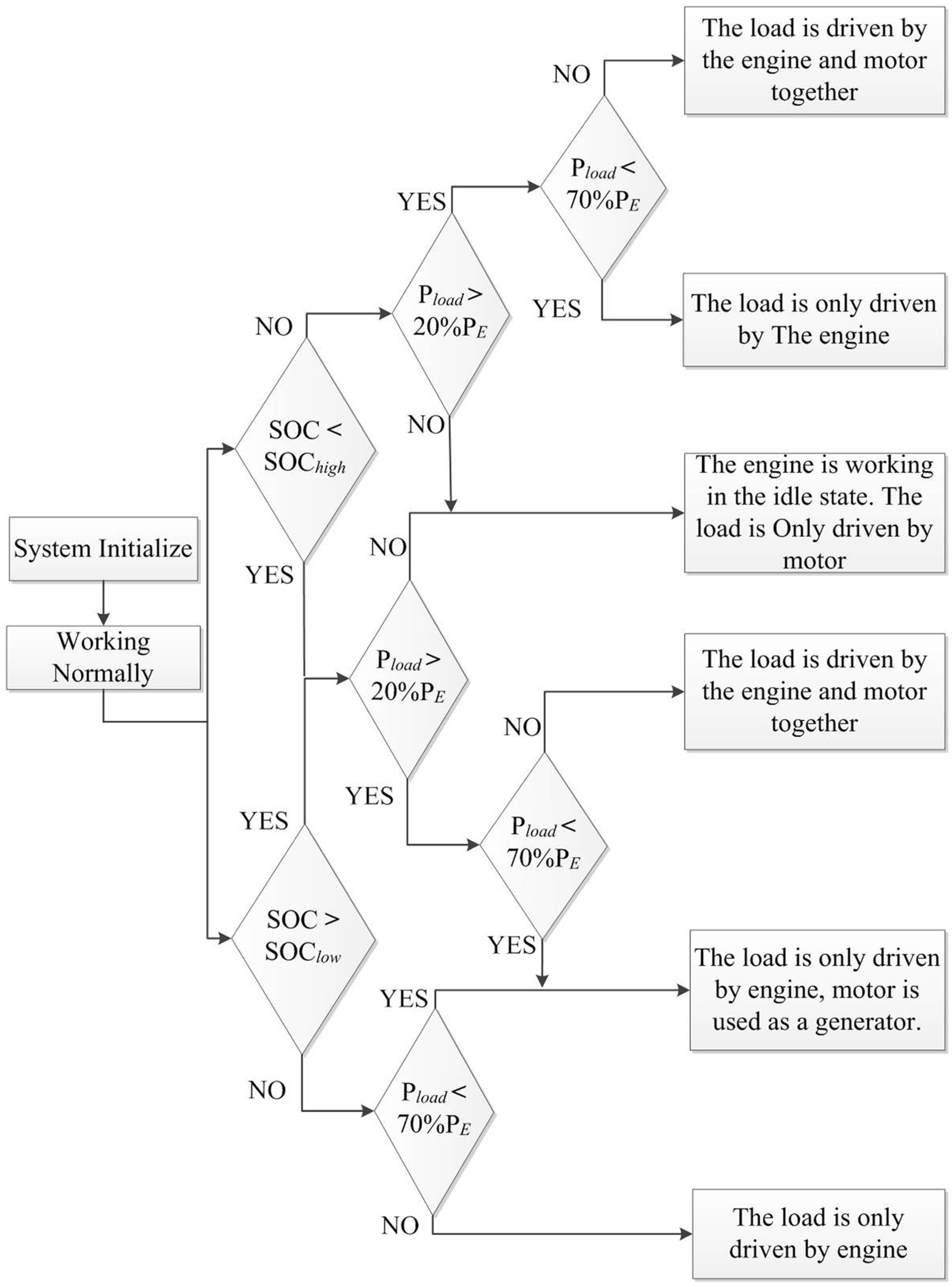
Flowchart of control strategy for a hybrid excavator power system.
Simulation and analysis of the control strategy
In order to compare the fuel consumption and emission of the new hybrid power system and the conventional power system for the hydraulic excavator, the AMESim models of the proposed boom potential energy recovery system for parallel hybrid excavator and the boom system for the conventional excavator are built. Figure 6 shows the model of the proposed system, while Figure 7 displays the conventional boom system without energy recovery unit.

Model of the boom system for the conventional hydraulic excavator.

Model of the boom potential recovery system for parallel hybrid excavator.
There are five working periods in the work time of the two systems. The idle speed of the engine is 700 r/min. The initial SOC of the battery in the hybrid excavator system is 60%. The minimum threshold and the maximal threshold of SOC for the battery are set to 20% and 80%, respectively.
The fuel consumption of the two systems is shown in Figure 8. Figure 9 shows SOC of the battery in the hybrid power system. The emission of the two systems is presented in Figures 10 and 11.
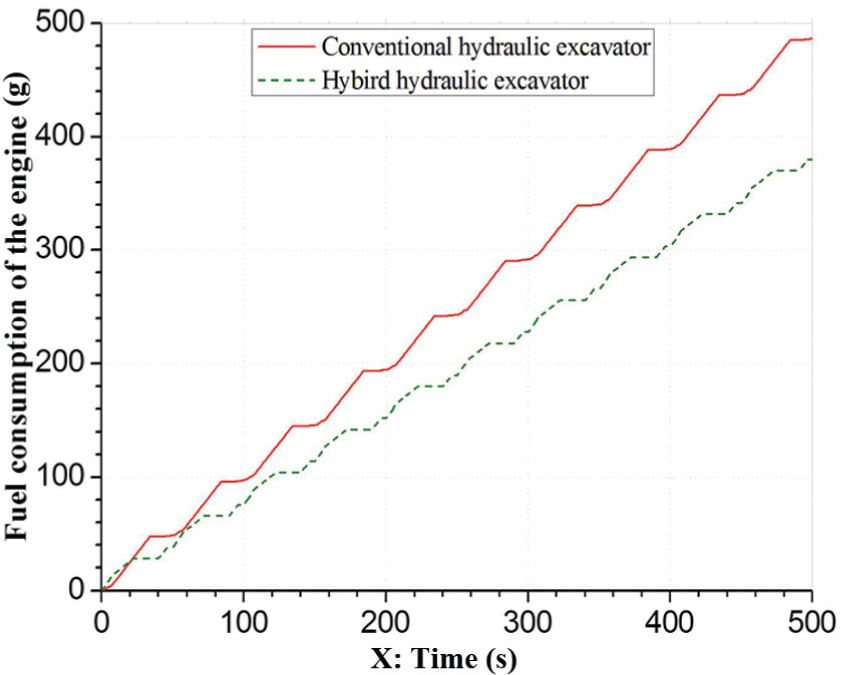
Engine fuel consumption of the two systems.

SOC of the battery in the hybrid power system.

Engine emissions of the conventional excavator system.
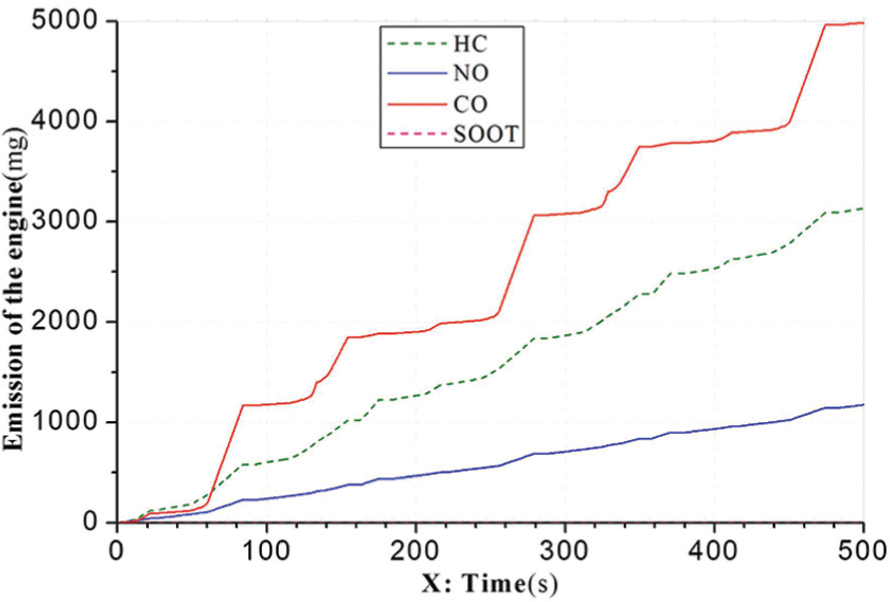
Engine emissions of the hybrid excavator system.
Based on Figure 8, it can be seen that the fuel consumption of the conventional excavator power system is 486.37 g in five working periods, while the fuel consumption of the hybrid excavator power system with the boom potential energy recovery system is 379 g. Compared with the conventional excavator power system, the fuel consumption of the hybrid power system is decreased by 22%.
Figure 9 shows that the power system works in the hybrid mode at the beginning of working. The load is driven by the engine and motor together. Hence, SOC of the battery in the hybrid system is decreased from 60% to 59.93%. When the load power is smaller than the rated power of the engine, the load is only driven by the engine. The excess power is converted to the electrical energy and stored in the battery. SOC of the battery increases gradually.
The emissions of the engine include CO compounds, NO compounds, HC compounds, and soot. According to Figures 10 and 11, the emission of the hybrid excavator power system is half that of the conventional hydraulic excavator. Therefore, the emission of the engine is reduced effectively.
Based on the simulation figures above, it can be seen that
Compared with the conventional hydraulic excavator, the load is driven by the engine and motor in the hybrid excavator power system. The engine works in a high efficient area. The fuel consumption is reduced. The excess power and the potential energy are converted into electrical energy and stored in the battery. The working efficiency of the system improves.
The battery in the hybrid system is used to store excess power of the engine and potential energy of the boom. When the load power is greater than the rated power of the engine, the load is driven by the engine and motor together. Therefore, the battery always switches between charge and discharge working states. SOC of the battery does not exceed its maximum and minimum thresholds. The working life the battery is improved.
The engine always works in the high-efficiency fuel region. The fuel consumption is decreased and the emission is improved. The results show that the control strategy based on the working condition and SOC of the battery can effectively reduce the pollution of the environment.
Conclusion
In this article, taking the complexity and cost of the system into consideration, a control strategy for a novel boom potential energy recovery system of parallel hybrid hydraulic excavator is proposed. Compared with the conventional energy recovery system, the simulation results show that the proposed energy recovery system brings higher energy recovery efficiency. The models of the conventional hydraulic excavator and the parallel hybrid excavator with the energy recovery system are built. The model of the proposed control strategy is represented. The results prove that the fuel consumption of the power system for the hybrid excavator is decreased and the emission is improved based on the control strategy. The proposed model can be further used for the purpose of diagnosis of complex systems.
Footnotes
Academic Editor: Zhijun Li
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds for the Central Universities (2012QNA31), the National Natural Science Foundation of China (51475455), and the Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).