
Abstract
The Mining conveyor belts play a vital role in mining production, however, due to their long time and high load operation characteristics, there are inevitably a variety of safety hazards. Ensuring the safety of mining conveyor belts is crucial to minimizing accidents and enhancing production efficiency. This study outlines the importance of safety surveillance for mining conveyor belts and introduces the LEC YOLOv5 algorithm. Building upon the YOLOv5 algorithm, the proposed approach integrates an innovative network, attention mechanism, early stopping mechanism, and optimized loss function. Initially, the Ghost convolution method is introduced to simplify the model’s complexity and structure. Additionally, the Efficient Channel Attention mechanism is incorporated to enhance the model’s detection performance. Subsequently, an early stop mechanism is implemented to decrease training time, hardware consumption, and overall model computation. Finally, the loss function is refined to strengthen the model’s localization ability. Experimental results demonstrate that the enhanced LEC YOLOv5 algorithm decreases the number of model parameters and floating-point operations by approximately 44.03% and 50.42%, respectively. Moreover, the model’s volume is reduced from 92.7 to 52.2 M. The detection precision and recall have been enhanced by approximately 1.27% and 0.44%, respectively. In terms of real-time detection performance, the rates for lump coal and conveyor belt surface breakage achieved 106.38 and 132.74 FPS, respectively. It is evident that the updated LEC YOLOv5 algorithm is capable of efficiently monitoring and precisely identifying the operational status of the conveyor belt. This innovation offers dependable safety and promotes efficient production within the mining industry.
Introduction
With the continuous expansion of the scale of mining engineering and the improvement of the production level, mining conveyor belts play a vital role in coal mine production. However, due to the high-speed operation and complex working conditions of mining conveyor belts, accidents occur frequently, posing a serious threat to personnel safety and production efficiency. Therefore, safety monitoring of mining conveyor belts has become an urgent problem in coal mine management.1,2
The conveyor belt used in mining is a crucial piece of equipment for coal mine production, as its smooth operation is closely connected to the efficiency and quality of coal transportation. By continuously monitoring the conveyor belt in real-time, it is possible to detect and address any operational abnormalities promptly. This process not only enhances the reliability and stability of the conveyor belt but also ensures the uninterrupted transportation of coal, thereby boosting overall production efficiency. 3
It is pointed out in the literature 4 that the abnormal dropping of lump coal may adversely affect the safe operation of the conveyor belt, especially at high speeds, which may lead to abnormal vibration of the conveyor belt, and subsequently cause local fracture of the internal steel core. To solve this problem, based on image edge and similarity detection, a new anomaly detection algorithm for lump coal drop is proposed, which realizes high-precision and high-efficiency lump coal drop anomaly detection. In the referenced literature, 5 utilizing the YOLOv3 algorithm, the lightweight Mobilenetv2 network serves as the backbone for feature extraction. This approach is further augmented with the CBAM attention mechanism to improve the feature extraction process, 6 thereby enabling the detection of chunky coal on a mining conveyor belt.
Similarly, in the literature, 7 the authors pointed out that the mixing of coal pieces of different sizes may not only reduce the quality of the coal, but also may cause damage to the mining conveyor. Hence, the researchers enhanced the YOLOv3 algorithm through the utilization of K-means for grouping foreign entities. This approach significantly enhances the accuracy of object identification, thereby guaranteeing the safe operation of mining conveyors. 8 In a different study, 9 the researchers employed the YOLO4 algorithm for detecting gangue while mining conveyor belts are in operation and conducted a comparison with SSD and Faster R-CNN algorithms, demonstrating the superior performance and dependability of the YOLO algorithm.10–12 In prior studies, 13 scholars extensively explored the significance of utilizing mining conveyor belts. Moreover, by integrating the CBAM attention mechanism into the YOLOv5 algorithm, researchers aimed to enhance the effectiveness of target detection. Nevertheless, the intricate design of this algorithm results in suboptimal real-time detection speed, clocking in at only 31 FPS. Whereas in literature, 14 the authors realized the lightweight feature extraction of lump coal in mine conveyor belt by improving Efficient Net. In the literature, 15 the authors realized the intelligent monitoring during coal transportation and effectively realized the detection of lump coal and conveyor belt steel core, so as to guarantee the operation safety of mining conveyor.
More recently, significant advancements have been made in optimizing object detection models for the specific constraints of underground mining environments. Wu et al.16,17 extensively explored the fusion of lightweight networks and attention mechanisms to enhance lump coal detection, further proposing the SSB YOLOv8 method 18 which utilizes multi-information fusion to reduce redundancy and improve accuracy. Addressing the challenge of low-resolution features in real-time monitoring, Wu et al. 19 introduced the SNW YOLOv8 model. By incorporating the space-to-depth Conv (SPD-Conv) module and the normalization-based attention module (NAM), they achieved detection speed of 192.93 FPS while maintaining a lightweight parameter size of 6.04 million. Furthermore, to tackle environmental interference such as dust and varying lighting conditions, Chen et al. 20 proposed a multimodal data fusion method named YOLO DKH. This approach integrates RGB and infrared data using a Deformable Spatial Attention (DSA) mechanism and KANA2 dual-attention, enhancing robustness and precision in complex underground scenarios.
To enhance mine production efficiency and mitigate accident risks, conducting safety monitoring on mining conveyor belts proves to be a beneficial approach. 21 However, the current target detection algorithm has a single application scenario and can only realize the detection of a single target, such as: coal gangue, large pieces of coal, falling coal, conveyor belt steel core, and other foreign objects, and cannot realize the simultaneous detection of multiple situations. 22 Moreover, the algorithm’s model includes excessive feature extraction, intricate structure, substantial computational requirements, and inadequate real-time efficiency.
To address the aforementioned issues, the proposed approach combines the early stopping mechanism with the lightweight attention mechanism and enhances the loss function optimization. 23 The proposed YOLOv5 safety monitoring approach, namely Lightweight-ECA-CIOU Loss (LEC), is designed for monitoring conveyor belts in mining operations. This method enables real-time monitoring of conveyor belt performance, including detecting lumps of coal and identifying belt breakages during operation. 24 By improving production efficiency and ensuring the safety of transportation equipment, this paper introduces several innovations.
(a) Introduction of lightweight Ghost convolution and ECA mechanism to realize light-weight feature extraction, enhance the accuracy of detection, streamline the model architecture, and improve feature extraction tendencies.
(b) Incorporation of an early-stop mechanism to reduce training time, speed up model convergence, and enhance both generalization performance and resource utilization efficiency.
(c) Optimization of the loss function, applying CIOU Loss to improve the loss function, increase centroid distance and aspect ratio of the target, consider the similarity between the target frames, and enhance the identification and localization ability of the model.
Conveyor belt monitoring schematic
As a key equipment in mining production, the smooth operation of the production process is closely linked to the safety of mining conveyor belts. Utilizing computer vision technology and target detection methods enables effective safety monitoring of mining conveyor belts. 25
Utilizing computer vision technology, the YOLOv5 algorithm developed in this study enables the continuous monitoring of conveyor belt operation. As illustrated in Figure 1, this monitoring encompasses observing lump coal movements on the belt and detecting potential damage to the conveyor belt.
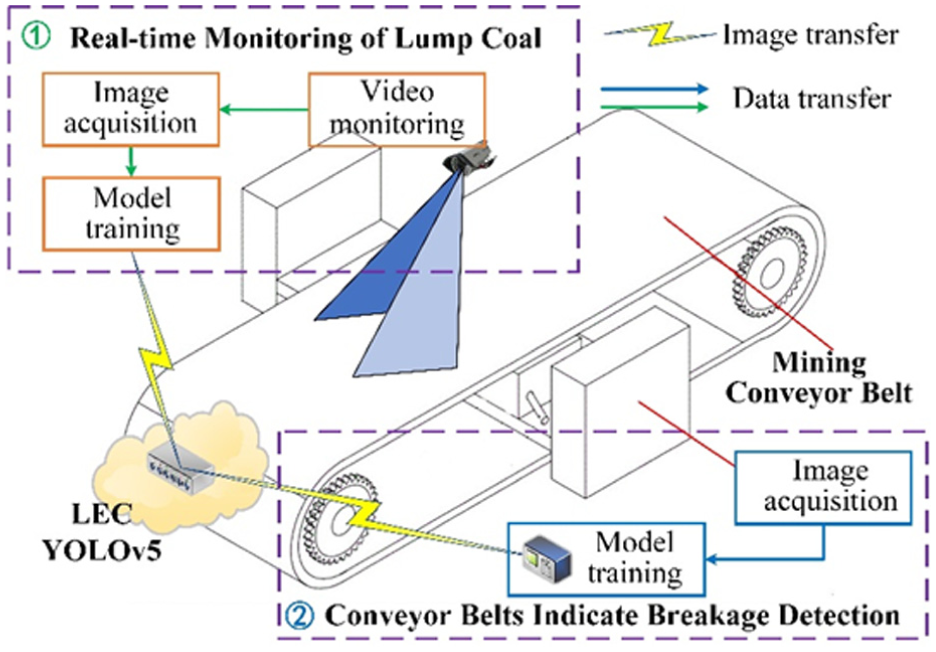
Conveyor belt monitoring schematic.
As shown in Figure 1, since all neurons in each channel can be observed from the figure that the safety monitoring of mining conveyor belts based on deep learning is segmented into two components. For the first part, video data and images are gathered from the upper surface of the conveyor belt, and through model training, real-time monitoring of the lump coal during conveyor belt operation is achieved. Concurrently, the lower surface captures images of the conveyor belt, and model training is employed to detect surface breakages. The proposed mining conveyor belt safety real-time monitoring model presented in this paper is capable of simultaneously monitoring both types of mining conveyor belts conditions and enhances the transportation safety index.
Basic theory
Lightweight neural networks
Lightweight convolution is becoming increasingly important in the field of deep learning, featuring small model size, high computational efficiency, fast training speed, and low computational power consumption, especially on mobile devices and embedded systems, where its advantages and importance are becoming more and more prominent. 26
Ghost convolution 27 improves the efficiency of feature extraction in the model by introducing both traditional convolution and lightweight convolution, which allows for weight sharing and a reduction in parameters. Ghost convolution is particularly well-suited for compact models, as it decreases the number of parameters while still maintaining a relatively high-performance level, thus facilitating the deployment of the model in settings with limited resources. Simultaneously, it can effectively reduce the computational cost and achieve efficient utilization of computational resources through the shared weights of the auxiliary convolution.
As shown in Figure 2, Ghost lightweight convolution first generates a small number of primary feature maps, and on this basis, traditional feature maps and lightweight feature maps are generated using traditional convolution and linear transformation

Where

Ghost conv.
Compared with traditional conv, Ghost convolution reduces the computation to 1/z of the original computation, realizes precision-aware feature selection and adaptive activation, and enhancing the network’s functionality, it can vastly boost its efficiency, outperforming other networks in real-time within identical circumstances.
In general, the utilization of Ghost convolution for lightweight purposes can fulfill the immediate requirements for efficient and lightweight deployment of models, ensuring model efficiency while preserving the model’s expressive capabilities to prevent unnecessary loss of information. Introducing lightweight Ghost convolution in mine conveyor belt safety detection is considered an effective solution for real-time monitoring of mine conveyor belt safety.
ECA mechanism
Compared to traditional attention mechanisms like SE (Squeeze-and-Excitation) attention, 28 the ECA mechanism 29 demonstrates greater computational efficiency. It uses one-dimensional convolutional operations, which reduces the computational complexity and makes it more suitable for large-scale deep neural networks.
The ECA mechanism introduces relatively few parameters, reducing the size of the model and lowering the storage requirements. Simultaneously, the convolution operation in one dimension more effectively captures the distant relationships among feature channels, enhancing the model’s capability to recognize overall information. 25
Figure 3 illustrates the ECA mechanism. Initially, the feature map undergoes a transformation from

where C is the channel of the input,
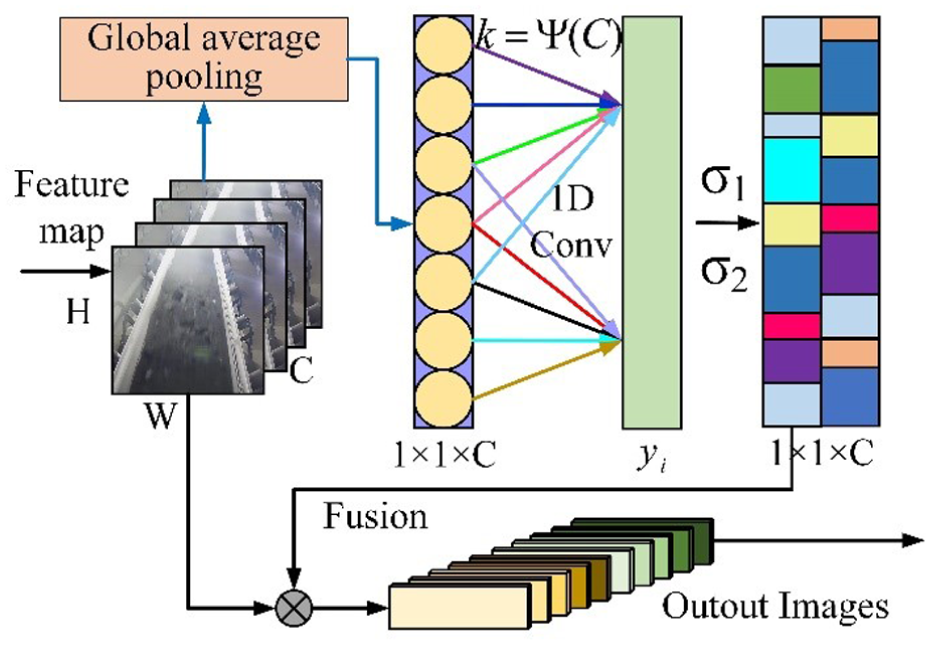
ECA module structure.
Ultimately, the reshaped weight values are used to multiply with the original feature map in order to obtain the feature map with varying weights. This results in the effective extraction of feature maps.
In monitoring the safety of mining conveyor belts, incorporating the ECA attention mechanism can enhance model performance, reduce model size, and speed up inference. Additionally, it helps in mitigating overfitting risks, thereby improving both generalization capabilities and practical applicability of the model.
Early stop mechanism
Early Stopping (also known as Early Termination) 30 is a widely used method for regularization in deep learning. It assists in the prevention of overfitting by halting the training process once a specific criterion is met. This approach minimizes computational overhead and enhances resource utilization efficiency.
The early stopping mechanism enables the model training to converge faster, which helps to train the robustness of the model to the real data, by utilizing the early stopping mechanism, researchers are able to better regulate the model’s training process in order to enhance the experiment’s repeatability and stability.
Fundamentally, the early stopping mechanism is a crucial technique in deep learning. It enhances the model’s generalization performance, optimizes resource utilization efficiency, and ensures the reproducibility of experiments by regulating the model training process.
Optimized the loss function
The Generalized Intersection over Union (GIOU) Loss 31 is simpler to execute gradient optimization compared to the conventional Intersection over Union (IOU) Loss when determining the likeness among target frames. This facilitates enhancing the model’s training stability and streamlining the convergence process.
GIOU Loss not only considers the positional overlap of the target frames, but also the area and shape of the target frames, which provides a more comprehensive measure of the similarity between the target frames, in addition to better adaptability to targets of different scales. 32
Complete Intersection over Union (CIOU) Loss enhances GIOU Loss, striving to further boost the performance of the loss function in target detection tasks.
The formula for CIOU Loss, as demonstrated in Figure 4, takes into full account the overlap area, the distance from the center point, and the aspect ratio of the predicted frame. The calculation formula is presented below:



CIOU loss diagram.
In equations (3) and (4),
On the whole, CIOU Loss offers a more comprehensive assessment of the likeness between target frames by incorporating terms to adjust centroid distance and aspect ratio. 33 This enhancement improves the effectiveness in the safety detection task for mining conveyor belts compared to GIOU Loss. It also contributes to enhancing precision and resilience of the model in the target detection assignment.
Improved YOLOv5 algorithm
YOLOv5 performs well in target detection tasks with high detection precision and speed. Its optimized network structure and training strategy enable efficient target detection even in complex scenarios. Compared to previous versions, YOLOv5 is designed to be more lightweight while maintaining high performance. This feature enhances its applicability in settings with limited resources, like embedded systems and mobile platforms.
As depicted in Figure 5, the YOLOv5 model is comprised of five components: Backbone, Neck, Head, Loss, and Post-processing. The Backbone module is responsible for extracting features from the input image and generating high-level semantic features through multi-level processing. The Neck component efficiently integrates semantic information at various levels to enhance target detection accuracy. Target detection is carried out by the Head module, which analyzes the feature maps produced by the Backbone network. 29 The Loss function is utilized to enhance algorithm convergence speed and accuracy. Lastly, Postprocessing employs non-maximal suppression (NMS) to eliminate redundant detection frames and preserve the most relevant target frames, thereby enhancing the interpretability and accuracy of detection outcomes.

LEC YOLOv5 structure.
The flow structure of the enhanced LEC YOLOv5 is illustrated in Figure 6. As depicted in the diagram, initially, a lightweight feature extraction network is incorporated into the feature extraction network, where the Ghost convolution and Ghost bottleneck are employed alternatively for feature extraction. Subsequently, the ECA attention mechanism is implemented between the feature extraction and feature fusion network to enhance the feature extraction trend and boost detection accuracy. 34 Ultimately, by utilizing the LEC YOLOv5 algorithm, simultaneous detection of large coal pieces on the mining conveyor belt and breakage on its surface can be conducted, along with the capability to detect targets of varied scale sizes.
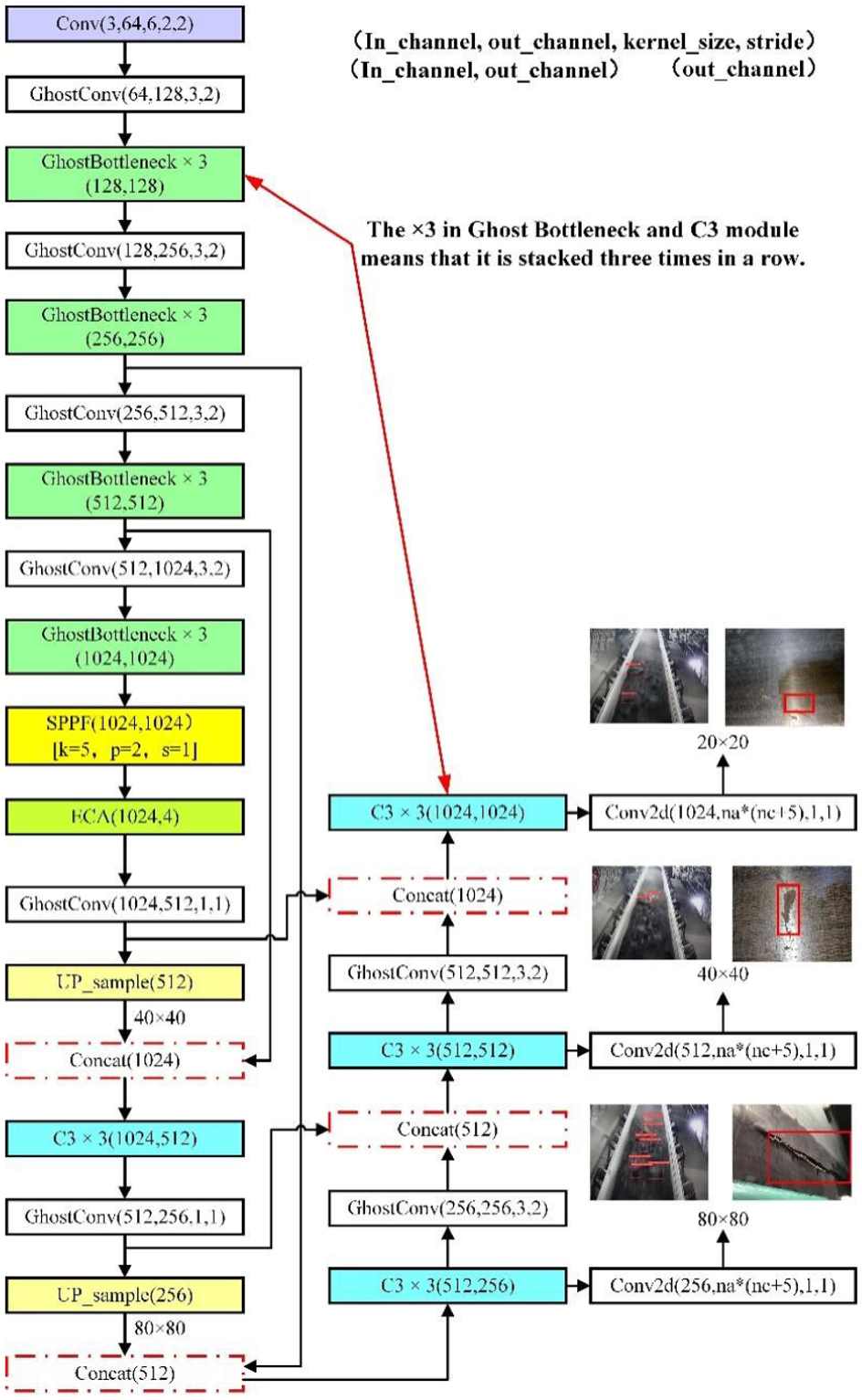
LEC YOLOv5 structure diagram.
In the realm of target detection, YOLOv5 has emerged as a prominent area of study due to its impressive capabilities, streamlined structure, and user-friendly interface, garnering significant attention in comparison to YOLOv7 and YOLOv8. This model has demonstrated outstanding success in the realm of safety monitoring for mining conveyor belts.
Experimental analysis
Experimental platforms and algorithmic parameter
The experiment was completed under Windows 11, Inter Core i9-10900k, NVidia GeForce RTX 4090 10G with DDR4 3600 MHz dual memory hard-ware, and the test is completed by Pytorch deep learning framework, Python 3.9.1, and CUDA11.8.
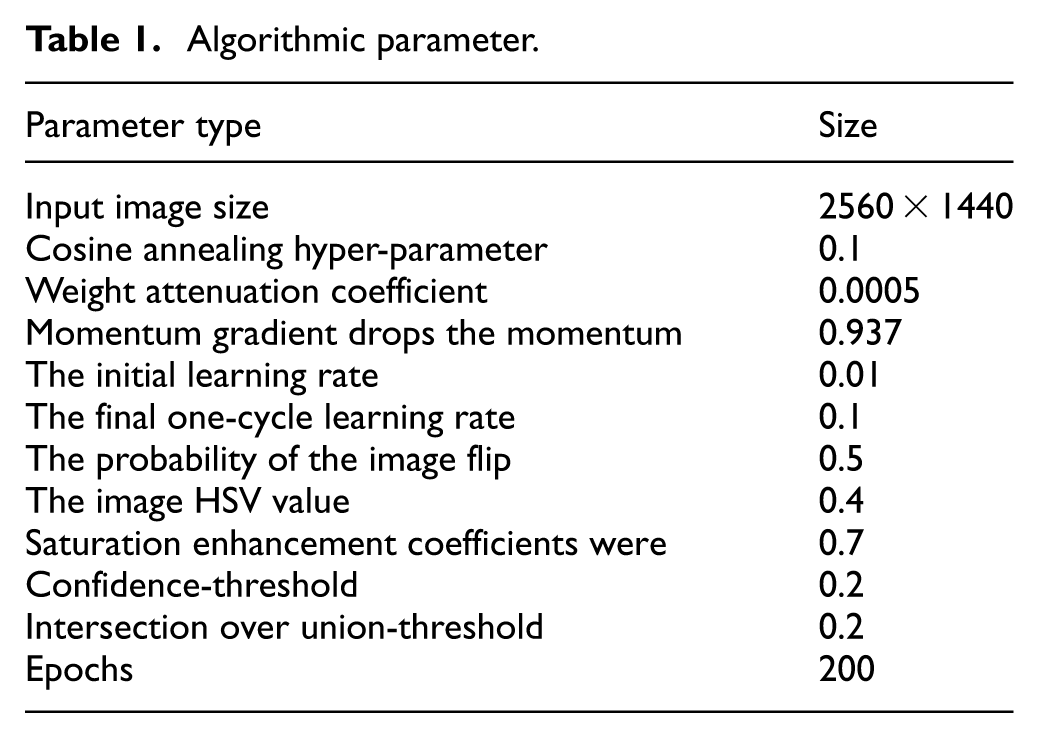
The algorithm parameters considered primarily encompass network architecture, training parameters, and inference parameters. To ensure the experiment’s fairness, the parameters for both the original YOLOv5 and the enhanced LEC YOLOv5 were consistently aligned. The detailed algorithm parameters are presented in Table 1.
Algorithmic parameter.
Experimental datasets and ablation experiment
The video data was captured using a high-definition industrial camera mounted directly above the conveyor belt. The camera was configured with a resolution of 2560 × 1440 pixels and a frame rate of 25 frames per second (FPS). To ensure data consistency, key optical parameters were kept fixed during the collection process: the shutter speed was set to 1/50 s to minimize motion blur from the high-speed belt, and the field of view was adjusted to approximately 120° to fully cover the belt width without distortion.
The experiment gathers video data for a comprehensive 125 min duration, with approximately 83 min comprising the available dataset. Out of this, 37 min were of superior video quality, and the data collection timeframe mainly consists of night shifts. At the same time, the above video was single-framed to complete the image acquisition, and the video single-framing process sets the acquisition period to save 1 frame for every interval of 25 frames, which is about 1 frame/s.
For the real-time monitoring of lump coal on a mining conveyor belt, an arrangement was made with 800 frames for the training set, 200 frames for the validation set, 20 frames for the test set, and a test video lasting 1 min. Similarly, in mining conveyor belt surface breakage detection, 200 images with different breakage degrees were captured, 120 training sets, 50 validation sets, and 30 test sets were set.
Using the above datasets, ablation experiments were conducted to gradually add or adjust component types, positions, or parameters in the model to assess their impact on the overall model performance. These ablation experiments enable a more comprehensive and in-depth understanding of the performance, stability, and interpretability of the deep learning target detection model, providing strong support for further optimization of the model, algorithms, and system design.
Table 2 demonstrates the real-time monitoring technique for conveyor belt lump coal, which is founded on lightweight and multi-information fusion principles. This method involves performing three distinct ablation experiments, resulting in the development of three separate ablation experimental models. Ghost convolution and Ghost bottleneck are added sequentially in Model 1 and Model 2, while the early stopping mechanism is introduced in Model 3, and Model LEC YOLOv5 optimizes the loss function and adds CIOU Loss based on Model 3.
Ablation experiments.

Model lightweight analysis
The lightweight design of LEC YOLOv5 makes the model more suitable for resource-constrained environments, and lightweight design is usually accompanied by faster reasoning.35,36 In the process of model lightweighting, it helps to reduce the power consumption and resource usage of the model, enabling more efficient operation in energy-constrained environments.
The main parameters for assessing model lightweight include the number of model network layers, parameters, floating-point operations, and volume. Table 3 displays the structural parameters of each ablation experimental model for the model lightweight analysis.
Lightweight analysis.

In comparison to the original YOLOv5 model, the enhanced LEC YOLOv5 algorithm demonstrates improved performance and a clear advantage in terms of being lightweight. Specifically, the updated LEC YOLOv5 model features an increased number of network layers, rising from 468 to 531 as a result of Ghost convolution integration and the stacking of Ghost Bottleneck modules. Despite the increase in layers, the revised model experiences a reduction of approximately 44.03% in parameters, a 50.42% decrease in floating-point operations, and a compression of model volume from 92.7 to 52.2 M.
Overall, the improved LEC YOLOv5 algorithm can better adapt to the resource-constrained environment of underground coal mines while realizing higher performance, providing a more flexible and efficient solution for safety monitoring of mining conveyor belts.
Mmodel detection performance analysis
In deep learning detection, the metrics used to evaluate model performance include precision, recall, and the mean Average Precision at 0.5 (mAP@0.5). Precision quantifies the ratio of correctly predicted samples to the total number of samples, thereby assessing the model’s reliability. Recall, on the other hand, measures the coverage of the model’s detections. mAP@0.5 refers to the average precision that integrates target detection precision across various categories, allowing for the calculation of the mean of AP values for each category. Precision serves as a crucial indicator of model reliability, and this study examines the precision (P) curve alongside the mAP@0.5 precision curve for a comprehensive performance comparison.
Throughout 500 training iterations, the model precision curves for both YOLOv5 and LEC YOLOv5 showed an upward trend before stabilizing. When examining the safety detection of mining conveyor belts, the average precision obtained by the YOLOv5 algorithm was 59.53%, whereas the LEC YOLOv5 algorithm demonstrated an average precision of 60.80%.
The model precision curves before and after the algorithm improvement are shown in Figure 7. Based on the scatter plot analysis, it is evident that the detection accuracy of the enhanced LEC YOLOv5 model surpasses that of the original YOLOv5 algorithm. Moreover, the enhanced model demonstrates a higher level of precision in clustering. Additionally, during the model’s pre-training phase, LEC YOLOv5 shows increased detection precision and a faster rate of precision growth. It is demonstrated that the proposed LEC YOLOv5 algorithm has better model stability and precision in safety monitoring of mining conveyor belts.

Model precision curve.
In addition, the improved LEC YOLOv5 algorithm introduces an early stopping mechanism, so that the training will stop when the model precision fluctuates within a certain range to minimize the waste of resources and training costs. The improved LEC YOLOv5 algorithm stops the iterative training after the precision is stabilized at 64.24%, and the average precision is stabilized at 64.0% relatively stable, and the number of iterations is only 485, which is reduced by 15 times compared to the 500 iterations set for training, which effectively saves the training cost and hardware resources.
The average precision at an IOU threshold of 0.5, known as mAP@0.5, represents the mean average precision value across various categories. In the context of real-time monitoring for both lump coal on conveyor belts and detecting surface breakage on conveyor belts, Figure 8 displays the precision curve for mAP@0.5.

Model mAP@0.5 average precision curve.
In mining conveyor belt safety monitoring, the mAP@0.5 average precision curve is shown in Figure 8. The average accuracies of YOLOv5 algorithm and LEC YOLOv5 algorithm are 53.11% and 55.69%, respectively. In addition, the recall of LEC YOLOv5 algorithm is also higher than the YOLOv5 algorithm, and the average recall of YOLOv5 algorithm and LEC YOLOv5 algorithm in the safety monitoring of mining conveyor belts are 54.18% and 54.62%, respectively
Model real-time performance analysis
During safety inspections of mining conveyor belts, it is essential to promptly and accurately detect large coal pieces and any surface damage on the belts. This is key to maintaining the effective operation of the system and enhancing the practical application. Such measures can protect personnel and property, as well as boost production efficiency.
Real-time performance is usually expressed as FPS, which refers to the rate at which image or video frames are capable of being analyzed per second. Typically, real-time monitoring systems necessitate a detection efficiency surpassing 30 FPS. The real-time detection capabilities of a model are indicative of its computational efficiency. A model with a straightforward and logical structure generally exhibits a faster real-time detection speed, and the opposite holds true as well. Consequently, the model’s quality is commonly assessed by the number of frames it can FPS, with a higher FPS signifying superior real-time performance.
In the monitoring of mining conveyor belts for safety, the operation involves real-time observation of both lump coal and any breaks on the conveyor belt surface. Figure 9 illustrates the results from this real-time monitoring and detection process.

Real-time detection performance.
The figure reveals that the deep learning-based safety monitoring of mining conveyor belts encompasses two main aspects: the real-time surveillance of lump coal during conveyor belt operations and the detection of surface damage on the belts.
By leveraging computer vision and deep learning techniques, the YOLOv5 model demonstrates a performance rate of 58.82 frames per second (FPS) and an average of 17 ms per frame when analyzing 15 images of lump coal. Conversely, the LEC YOLOv5 algorithm exhibits a superior real-time performance, achieving 106.38 FPS with an average frame processing time of 9.4 ms, marking an enhancement of approximately 44.71% over the original YOLOv5 algorithm.
When it comes to detecting breakages on the surface of the conveyor belts over 15 images, YOLOv5 operates at 79.36 FPS with a frame processing time of 12.6 ms. Meanwhile, the LEC YOLOv5 algorithm performs at 132.74 FPS, with a frame processing time of 7.53 ms. This represents an improvement of around 40.22% as compared to the standard YOLOv5 algorithm.
Overall, the real-time performance of the enhanced LEC YOLOv5 algorithm is considerably more effective. It significantly surpasses the required 30 FPS benchmark for real-time monitoring. Therefore, it successfully facilitates the real-time observation of large coal pieces and conveyor belt surface breakage during operations, adequately satisfying the safety monitoring requirements of underground coal mines.
Comparison of detection effect
During the operation of mining conveyor belts, deep learning technology is utilized for safety monitoring, capable of identifying both lump coal and conveyor belt surface breakage simultaneously. Figure 10 illustrates the real-time monitoring of lump coal on mining conveyor belts. The enhanced LEC YOLOv5 algorithm exhibits notable improvements in monitoring performance compared to the original YOLOv5 algorithm. It excels in the detection of large lump coal and is also effective in identifying small to medium-sized lump coal that the original algorithm might have missed.

Comparison of real-time monitoring of lump coal: (a) YOLOv5 LEC YOLOv5 and (b) YOLOv5 LEC YOLOv5.
The YOLOv5 algorithm, as depicted in Figure 10(a), experiences issues with false detections and oversights. However, the incorporation of a lightweight network and attention mechanism has mitigated these errors, resulting in a reduced omission rate. Additionally, optimization of the CIOU loss function has led to more precise target detection and positioning, thereby enhancing overall positioning accuracy.
Detection of surface damage on mining conveyor belts can identify scratches and other forms of damage, as depicted in Figure 11. The comparison of detection outcomes reveals that the enhanced LEC YOLOv5 algorithm outperforms the original algorithm by identifying a greater number of damaged areas with increased confidence in detection.

Conveyor belt surface breakage detection: (a) YOLOv5 LEC YOLOv5, (b) YOLOv5 LEC YOLOv5, and (c) YOLOv5 LEC YOLOv5.
As shown in Figure 11(a) and (c), the improved LEC YOLOv5 is not only able to detect more broken regions, but also has a higher confidence level than the original algorithm, with a wider detection coverage and higher precision compared to the original algorithm.
In Figure 11(b), the original YOLOv5 algorithm only detects partial scratches, while the confidence level is only 0.63, while the improved LEC YOLOv5 algorithm not only detects the complete scratch area, but also the confidence level is higher than the original algorithm, which is 0.88. Although YOLOv5 fails to identify two minor damaged regions, the LEC YOLOv5 algorithm assigns confidence scores of 0.85 and 0.73, respectively. This indicates that the enhanced LEC YOLOv5 algorithm exhibits superior precision and recall in detection tasks, adequately fulfilling the requirements for detecting surface damage on mining conveyor belts.
To sum up, the safety monitoring technique for mining conveyor belts utilizing deep learning not only ensures real-time monitoring of lump coal during the operation of the conveyor belts but also simultaneously facilitates the detection of breakages on the conveyor belt surface. In addition, in terms of detection performance, the improved LEC YOLOv5 algorithm incorporates the lightweight network and attention mechanism to achieve higher detection precision and confidence. Simultaneously, by optimizing the loss function, both detection coverage and positioning accuracy are enhanced, thereby fulfilling the safety monitoring requirements in underground coal mines.
Discussion
The experimental results demonstrate that the LEC YOLOv5 algorithm effectively resolves the conflict between model lightweighting and detection precision in mining environments. By replacing standard convolutions with Ghost modules, the model achieves a 44.03% reduction in parameters, while the integration of the ECA mechanism and CIOU loss compensates for potential feature loss, ensuring high mAP@0.5 reaching 55.69%. Furthermore, the substantial increase in inference speed to over 100 FPS significantly exceeds standard real-time requirements, providing the necessary temporal redundancy to capture fast-moving hazards on high-speed conveyor belts.
Conclusion
The present work investigates a real-time safety monitoring system for mining conveyor belts using deep learning and computer vision techniques. The algorithm provides continuous monitoring of coal lumps on the conveyor belt during operation and identifies surface damages with a balanced approach between accuracy and efficiency. The proposed algorithm leverages an optimized version of the YOLOv5 algorithm, named Lightweight and Efficient Convolutional (LEC) YOLOv5, which integrates a lightweight network and attention mechanism to streamline the model’s structure and reduce computational demands. An early stopping mechanism is also employed to prevent unnecessary training iterations, thus minimizing the consumption of hardware resources. Moreover, the loss function has been refined to improve the model’s localization capabilities, enhancing the overall performance in monitoring conveyor belt safety.
While the results show that the improved LEC YOLOv5 algorithm enhances detection capabilities, the algorithm still faces limitations. These include potential challenges in detecting minor damages under complex environmental conditions and reduced performance under extreme lighting variations. Therefore, the algorithm may require further optimization for specific underground mining environments. From the perspective of industrial deployment, the proposed method offers significant cost-effectiveness. The model’s lightweight architecture facilitates deployment on low-cost embedded edge devices, lowering hardware investment barriers. Furthermore, the system supports predictive maintenance by identifying hazards early, thereby reducing the costs associated with unscheduled downtime. However, real-world deployment must address practical maintenance challenges, such as the necessity for regular optical lens cleaning to combat dust accumulation and the requirement for ruggedized hardware to withstand constant vibration.
Future work will focus on incorporating multimodal data fusion such as infrared or depth information and expanding the dataset to address these limitations and enhance the system’s adaptability to complex mining scenarios.
Footnotes
Acknowledgements
We appreciate the technical support provided by the team we are a part of.
Handling Editor: Divyam Semwal
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Basic Research Program of Shanxi Province (No. 202403021221181), the Key Research and Development Program (Agriculture) of Datong Science and Technology Plan (No. 2023015), and the Open Fund of Hubei Key Laboratory of Mechanical Transmission and Manufacturing Engineering, Wuhan University of Science and Technology (No. MTMEOF2024B05).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors upon request.