
Abstract
High fuel consumption in heavy-duty trucks contributes significantly to operating costs and carbon dioxide (CO2) emissions. While predictive cruise control (PCC) is an effective technology for optimizing vehicle speed, its energy-saving potential can be further enhanced. This paper proposes a fused control strategy that synergizes the PCC system with an intelligent, multi-mode coasting function. The algorithm leverages the PCC-generated speed trajectory to make optimal decisions between in-gear and neutral coasting, thereby maximizing the use of vehicle inertia. Simulations, benchmarked against a conventional PCC system, demonstrate that the proposed strategy achieves an additional energy saving of up to 5.73%, with a corresponding reduction in CO2 emissions.
Introduction
Heavy-duty trucks serve as the backbone of global freight transportation, yet they are disproportionately responsible for its environmental impact, accounting for ∼28% of road transport CO2 emissions despite comprising just 2% of the vehicle fleet. 1 Therefore, enhancing the fuel efficiency of heavy-duty trucks holds significant economic and environmental importance for improving the sustainability of the transportation sector, and contributing to global climate change mitigation. 2
The development of advanced driver assistance systems (ADAS) offers a promising technical avenue for addressing these challenges. ADAS not only enhances driving safety but also reduces energy consumption and emissions by optimizing vehicle operation conditions. Within the realm of ADAS technologies, predictive cruise control (PCC) systems, particularly those implemented using model predictive control (MPC), have demonstrated significant energy saving potential.3,4 On the basis of ensuring safety (e.g. maintaining a safe distance) and comfort (e.g. limiting acceleration/deceleration and jerk), these strategies leverage previewed road information (from digital maps, GPS, and sensors), such as grade, curvature, and speed limits, along with traffic information (e.g. preceding vehicle status and traffic signals), 5 calculate and execute optimal speed control sequences, thus to minimize fuel consumption while tracking a set cruise speed or remaining within an allowed speed band. 6 Hamednia et al. 7 proposed a computationally efficient hierarchical optimal driving strategy for long-distance energy saving, wherein the upper layer optimizes a nonlinear dynamic problem online using states including driving time, speed, and acceleration, while the lower layer handles gear shift decisions, which are pre-optimized offline. Sankar et al. 8 presented an energy-conscious PCC that employs a vector auto-regression model to predict short-term preceding vehicle behavior, enabling optimizing the ego vehicle’s driving trajectory for energy saving while ensuring safety. Furthermore, Nie and Farzaneh 9 integrated preceding vehicle state constraints and signal phase and timing (SPaT) into a PCC system to reduce energy consumption of electric vehicles in complex traffic scenarios; and also developed an instantaneous energy consumption model based on an artificial neural network, based on which quantified energy consumption across various conditions. Dong et al. 10 proposed a novel optimal control method for minimizing driving time and energy consumption, applied to vehicle platooning through continuous signalized intersections. In addition, for heavy-duty trucks, the multiple transmission gears introduce coupling between engine and powertrain output powers, for this issue, Hamednia et al. 7 adopted a hierarchical strategy where the upper layer plans the energy-optimal vehicle speed profile, and the lower layer optimizes the vehicle’s driving gear. More recently, a growing trend has emerged in synergizing MPC with learning-based methods, particularly reinforcement learning (RL), to further enhance control performance.11,12 A prominent approach in the literature is to employ a hierarchical control framework. In such architectures, an upper-level RL agent is responsible for high-level strategic planning, determining an optimal long-term speed profile based on its learned policy. This reference speed is then passed to a lower-level MPC controller, which is responsible for real-time optimal tracking and execution. The MPC layer excels at handling immediate vehicle dynamics and state constraints to ensure safe and smooth operation. This hierarchical RL–MPC structure demonstrates its potential for adaptive energy management in complex scenarios.
However, several challenges also persist for PCC applications.13–16 On the one hand, achieving reliable real-time implementation remains a significant hurdle. Although some researches have focused on developing fast computation algorithms for PCC, their reliability in dynamic, real-world scenarios still requires thorough validation. On the other hand, inherent to the nature of MPC, although MPC-based PCC can calculate control actions (such as engine torque or driving force) as an optimal sequence over the future prediction horizon, only the first element of this sequence is applied in execution, leaving the valuable information contained within the planned future trajectory largely underutilized.
In addition to PCC, coasting is also an energy-efficient method, which leverages the vehicle’s stored kinetic and potential energy to overcome driving resistances (e.g. aerodynamic drag, rolling resistance) with zero or minimal powertrain driving force. 17 Engaging in coasting mode avoids unnecessary fuel consumption that would otherwise occur during powered driving and prevents energy loss that would typically happen during braking. For heavy-duty trucks, given their substantial mass and significant inertial effects, the energy-saving potential of coasting strategies is particularly pronounced, under favorable conditions, the vehicles can even coast for several kilometers with only a minimal reduction in speed. Heavy-duty trucks can typically execute coasting mode through three primary modes: (1) neutral coasting: the transmission is shifted to neutral gear, with the engine idling 18 . (2) In-gear coasting (fuel cut-off): in-cylinder fuel injection is deactivated when the driver’s torque demand is zero, the engine remains coupled to the drivetrain and rotate 19 . (3) Engine-off coasting: the engine is shut off, and the clutch is released, thus disconnect the engine from the powertrain.20,21 Based on the backward vehicle simulation method, studies in Choi et al. 22 conducted online evaluation of various coasting strategies. Coasting activation was determined by calculating the required engine load from a predetermined vehicle speed curve. While some coasting schemes are commercially implemented, existing rule-based strategies predominantly rely on instantaneous vehicle state and limited road information, thus failing to fully exploit the potential offered by predictive coasting. The availability of previewed road information, particularly road grade, has been shown to enable superior performance in look-ahead control strategies.23–25 Leveraging road information preview, the study in Yan et al. 26 proposed an MPC-based eco-coasting strategy, which considered both in-gear coasting (fuel cut-off) and engine-off coasting modes to calculate the optimal entry and duration time. Similarly, the study in Prado et al. 27 utilized previewed road data to optimize energy-saving braking trajectories, applying the Pontryagin’s maximum principle (PMP) algorithm, the switching point between coasting and braking phases is optimized to achieve an optimal tradeoff between maximizing coasting duration and minimizing braking force. Generally, when the coasting timing is determined in optimization method, the coasting command is considered as a discrete decision variable (e.g. ON/OFF), leading to the optimal control problem being formulated as a mixed-integer optimal control problem (MIOCP), similar to the gear shift and engine start-stop optimization in hybrid electric vehicle energy management28,29 and engine start/stop control. 30 This review highlights a key challenge: existing methods either formulate the coasting decision as a computationally intensive MIOCP, such as Yan et al., 26 or focus only on continuous trajectory optimization without addressing the discrete mode switch, such as Prado et al. 27 To address this gap, our paper proposes a novel hierarchical structure. This framework is unique as it decouples the problem, leveraging a PCC (based on PMP) for continuous speed planning while a dedicated coasting decision module handles the discrete mode selection. This hierarchical approach avoids the computational complexity of a full MIOCP, thus ensuring its suitability for real-time application.
Although MPC-based PCC plans an optimal speed trajectory, the discrete decision of when and how to coast is typically handled by separate, often rule-based logic, leading to a sub-optimal utilization of the predictive information. The core innovation of our structure resides in establishing a synergistic relationship between the PCC and the coasting decision module. This approach decouples the continuous speed optimization from the discrete mode selection. This decoupling significantly simplifies the overall optimization problem, thereby enhancing the real-time computational capability of the PCC. The coasting algorithm, in turn, actively utilizes the future speed sequence predicted by the PCC, in addition to external preview information (e.g. road grade, traffic conditions, vehicle status) and safety constraints to establish clear criteria for coasting entry, maintenance, and exit phases. This includes distinguishing applicable scenarios for in-gear and neutral coasting modes, enabling precise, predictive coasting decisions that fully exploit the potential for energy saving.
The contributions of the paper are as follows:
Integrated control framework: A novel scheme that integrates discrete coasting mode decision logic into a continuous-time PCC optimization framework is designed, specifically addressing the tradeoff between in-gear fuel cut-off and neutral coasting modes.
Predictive coasting decision: Leverages the optimal speed trajectory predicted by the continuous-time PCC, enabling precise, predictive coasting decisions, and contributing to the overall scheme’s real-time capability and optimality. This framework is underpinned by a robust three-level safety strategy to ensure reliable operation under complex conditions.
Comprehensive validation: Comprehensive validations are carried out to illustrate the effectiveness of the proposed algorithm through simulation tests. The comparison of the fuel saving benefits are given across various operating conditions and vehicle loads.
The remainder of this paper is organized as follows: Section 2 details the system modeling, including vehicle dynamics, powertrain, and fuel consumption models. Section 3 presents the development controller for both the PCC and coasting algorithms and discusses their integration. Section 4 describes the simulation setup, test scenarios, presents, and discusses the simulation results. Finally, Section 5 provides the conclusion.
Modeling
Accurate mathematical models are essential for the design and evaluation of PCC and coasting control algorithms for heavy-duty trucks. These models must accurately describe the vehicle’s behavior, including longitudinal dynamics, powertrain characteristics, and fuel consumption. Such models serve as the foundation for the internal prediction and optimization processes, as well as for the overall algorithm validation.
Longitudinal dynamics for heavy-duty trucks
Figure 1 shows the longitudinal forces acting on a heavy-duty trucks, and the corresponding motion equations are:

where

Longitudinal forces acting on the heavy-duty trucks.
The term δ is the rotational mass factor, which accounts for the equivalent inertial effects of all rotating components in the drivetrain (e.g. wheels, axles, and engine flywheel) during acceleration. It is calculated using the following formula:

where
Summary of vehicle parameters.

Drivetrain model
The drivetrain model describes the power transmission from the engine to the wheels and is crucial for calculating the tractive force, engine operating point, and fuel consumption.
Engine fuel consumption model
Engine characteristics are commonly represented using a static map, often termed an Engine Map or Fuel Map, which provides the instantaneous fuel consumption rate

where
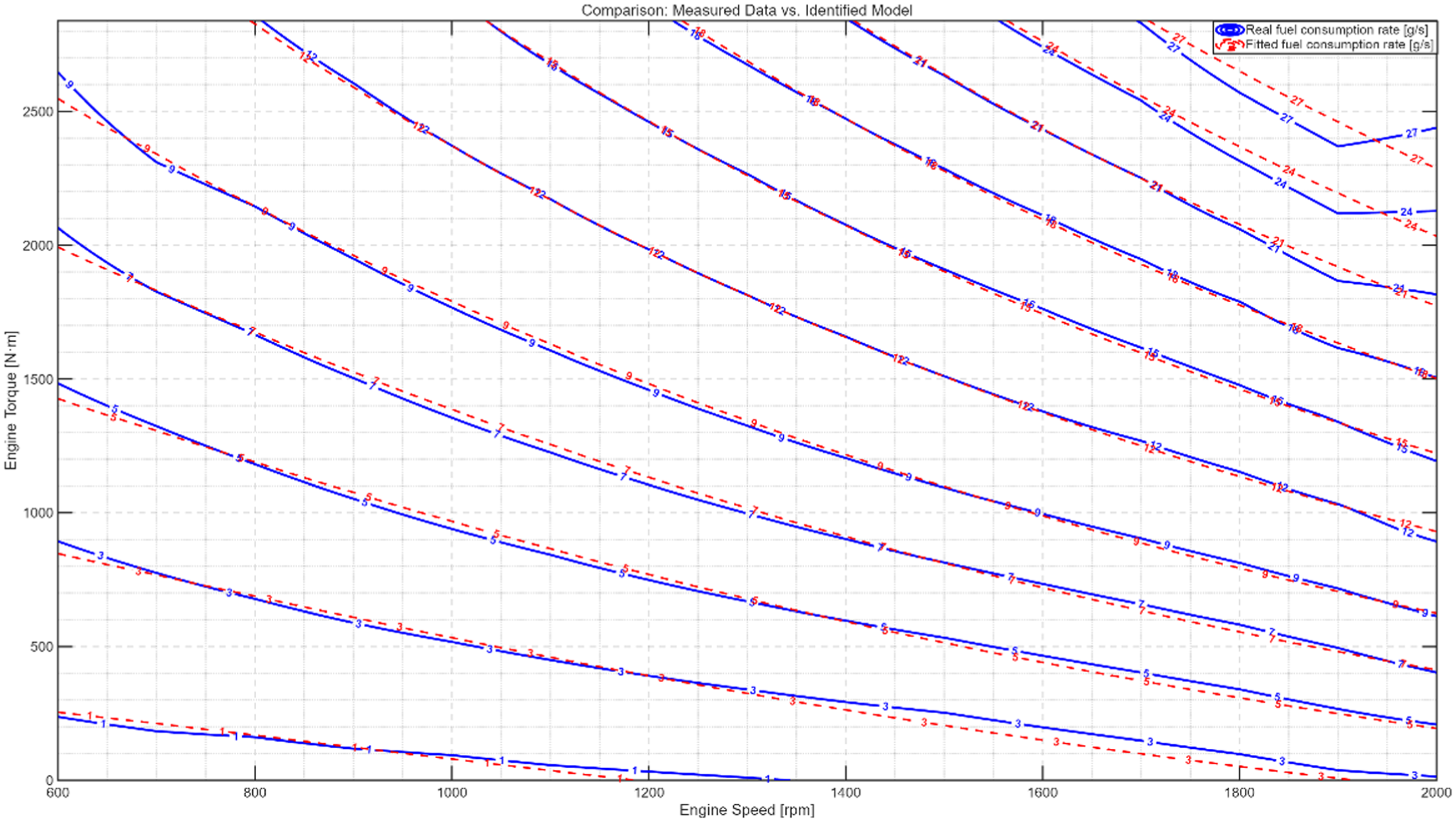
Polynomial fit of fuel consumption rate versus engine speed and engine torque.
Powertrain model
The powertrain model primarily consists of the transmission and final drive models, characterized by a set of discrete gear ratios

where
It is worth noting that the PCC controller predicts future vehicle states using the dynamic model, determines the engine operating point based on the above powertrain model, and calculates the associated fuel consumption cost using the fuel model. However, accurate modeling of coasting modes is critical for their effective optimization, which must precisely capture the differences in dynamics and fuel consumption between in-gear coasting (characterized by driveline drag torque and zero fuel injection) and neutral coasting (characterized by minimal driveline drag and engine idle fuel consumption). Consequently, the model incorporates the engine idle fuel consumption rate and the driveline drag torque characteristics during fuel cut-off. These specific model aspects will be further detailed in the section describing the coasting algorithm.
Controller design
Overall control scheme
The overall scheme is illustrated in Figure 3, which consists of three core modules: Map reconstruction module, PCC speed planning module, and Coasting decision module. The functions of these modules are as follows:
Map reconstruction module: The road grade information for the next 2 km ahead of the vehicle is updated in real-time and transmitted to the vehicle VCU and controller.
PCC speed planning module: Leveraging connectivity data (including road, environmental, and traffic information), an optimization problem is solved based on PMP and an iterative bisection algorithm, to optimize the vehicle’s tractive force and speed trajectory over the prediction horizon.
Coasting decision module: Leveraging connectivity data and the future tractive force and speed trajectories predicted by PCC, the algorithm determines the optimal timing and mode for engaging in coasting. This is done to exploit the potential of PCC’s optimized trajectory sequence for further enhancing vehicle fuel economy.
This framework achieves real-time capability by decoupling the continuous speed optimization (module 2) from the discrete mode selection (module 3), thereby avoiding the need to solve a computationally intractable mixed-integer optimal control problem (MIOCP) that would arise from a monolithic co-optimization. This decoupling strategy allows the PCC module (2) to solve only a continuous-time problem using the highly efficient PMP-based method, 31 while the coasting module (3) separately handles the discrete decisions.

Overall control scheme.
To manage the high computational load of the PCC module (2) in real-time, the coordination is implemented using a one-step delay strategy. At any given time step
Predictive cruise controller
During vehicle driving process, the performance metrics including energy consumption, traveling time, and driving safety should be taken into account simultaneously. The selected state quantities are
Then, the state-space equations can be represented as:

The PCC designed in this paper incorporates a multi-objective optimization problem within the MPC framework. The objective function includes the accumulated engine fuel consumption, the vehicle speed tracking error, and the terminal speed tracking. The specific expressions are as follows:

where
Considering the constraints of the driving and powertrain system, the relevant constraints are given as follows:





where equations (7) and (8) are the working range for engine speed and torque, which are related to the external characteristic curve of the engine; equation (9) represents environmental constraints, the acceleration command of the vehicle cannot exceed the maximum acceleration that the ground can provide; equation (10) represents the change rate of the vehicle’s drive force and cannot be too large for ensuring driving comfort; equation (11) represents the speed limit from two aspects: first, the speed limit specified by the road; second, for cornering conditions, in order to prevent the risk of the vehicle tipping over due to excessive speed, the vehicle speed needs to be restricted.
Rearrange the above dynamic equations, the following optimization control problem is formulated:

The PMP is applied to transform the optimization problem (12). First, the Hamiltonian function for the predictive cruise control optimization problem is defined as:

where
Parameters for the PCC controller.

Given the long prediction horizon is 50 s, the terminal penalty coefficient

Analysis of performance metrics for different kappa 1 parameter values.
Coasting algorithm
This section details the design of the coasting decision logic. The focus lies on utilizing the optimal speed trajectory generated by PCC to determine activate or terminate coasting timing, further to manage the selection between in-gear and neutral coasting modes. The key functions include: (1) smooth activation: facilitates a smooth transition from powered driving to coasting mode, representing the activation of coasting. (2) Optimized mode selection: calculates the equivalent energy consumption for both in-gear and neutral coasting modes, and determines the optimal mode switching timing. (3) Intelligent termination: selects the appropriate timing to exit coasting mode, thereby ensuring driving safety and economy. The detailed decision logic is illustrated in Algorithm 1.

Active activation of coasting mode
The coasting is divided into three distinct operating modes: Mode 0 represents normal powered driving, Mode 1 represents in-gear coasting, and Mode 2 represents neutral coasting. Specifically, the transitioning from normal powered driving (Mode 0) to either Mode 1 (in-gear coasting) or Mode 2 (neutral coasting) are primarily based on the current operating mode, the PCC-predicted tractive force sequence, speed limits, grade limits, and the distance to the upcoming downhill section. The transition criteria are detailed in the following Table 3.
Activation of coasting mode.

A key criterion for initiating coasting utilizes the predicted future tractive force sequence,
In summary, the condition for entering coasting mode is deemed satisfied only when the vehicle is currently in coasting mode or simultaneously satisfies all other judgment criteria.
It should be noted that, when the operating mode is Mode 1 or Mode 2 (i.e. the vehicle is currently in a coasting state), the condition is satisfied, allowing progression to the subsequent analysis stage.
Coasting mode switching based on “equivalent energy consumption.”
Once the vehicle is eligible to enter a coasting mode, it is further necessary to determine whether the optimal mode should be in-gear or neutral coasting to maximize energy saving during the coasting process. To address this, this paper proposes an “equivalent energy consumption” calculation method. This method integrates the predicted vehicle speed trajectory during coasting and based on this to calculates the kinetic energy loss. By converting this kinetic energy difference into an equivalent fuel consumption, it allows for a comprehensive energy assessment over the entire “cruise-coast-cruise” cycle, and effectively prevents the significant energy loss that occurs when substantial acceleration is required to return to the desired speed after coasting. The overall process comprises two main components: equivalent energy consumption calculation and the subsequent coasting mode switching logic.
Equivalent energy consumption calculation
“Equivalent energy consumption” is defined as the sum of the kinetic energy loss incurred during coasting (converted into an equivalent amount of fuel consumption) and the actual fuel consumption during the coasting period. This metric is designed to provide a comprehensive measure of the coasting process’s overall impact on vehicle energy consumption. To illustrate this concept, the calculation method for the “equivalent energy consumption” during “in-gear coasting” is explained below, with reference to Figure 5.
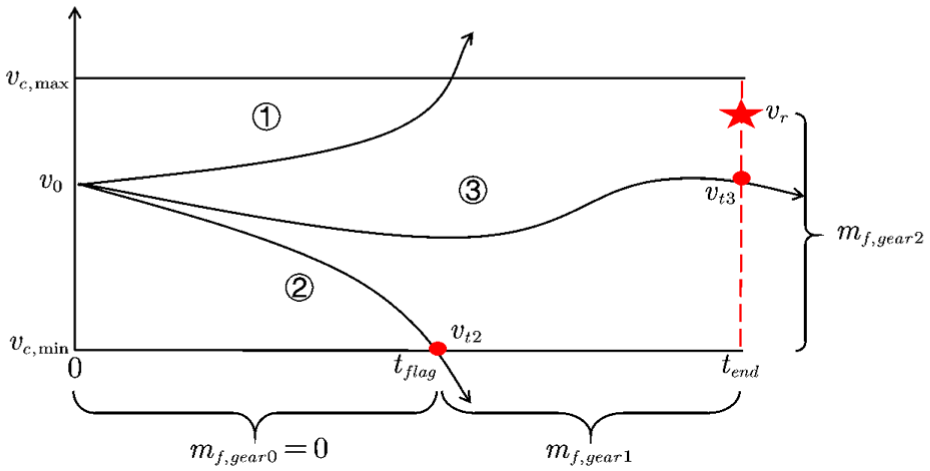
Schematic diagram for “equivalent energy consumption” calculation during in-gear coasting.
As aforementioned, once the vehicle is determined to be eligible for a coasting mode, and assuming in-gear coasting, the speed trajectory over a prediction distance
For Case 1, where the speed trajectory exceeds the maximum limit, indicates a very steep road grade causing the speed to increase rapidly. In this situation, the vehicle does not enter coasting mode for the consideration of safety. Instead, the higher-level VCU or PCC controller manages powered driving or braking as appropriate.
Regarding Case 2, where the predicted speed trajectory falls below the lower limit, the time
During the interval (

where

where
The vehicle speed at time

where
Overall, the total equivalent energy consumption is:

Regarding Case 3, it is assumed that the vehicle is always coasting in gear during time (0,
The calculation of equivalent energy consumption for neutral coasting is the same as that for gear coasting, and will not be repeated here.
Coasting mode switching logic
In summary, the equivalent energy consumption for both in-gear and neutral coasting modes is calculated separately. When made the real-time coasting mode decision, these two “equivalent energy consumption” values are computed and compared, the mode with the minimum “equivalent energy consumption” is then selected as the optimal coasting mode.
Furthermore, to prevent frequent oscillations between in-gear and neutral coasting modes, a switching hysteresis margin, denoted as
Criteria for exiting coasting mode
When the vehicle is in a coasting state, the system continuously monitors in real-time whether the criteria for exiting coasting mode are satisfied, as shown in Table 4.
Exiting conditions of coasting mode.

On the one hand, when the distance to the bottom of the slope ahead is less than the set value,
On the other hand, criteria related to the predicted speed during the ongoing coasting process are also evaluated. To ensure vehicle performance and consider the driver’s allowed speed range, a minimum permissible speed during coasting is defined. Specifically, the speed trajectory is predicted over the next 200 m with a spacing of 20 m, yielding 10 speed points, each of these predicted speed points is individually compared against defined speed limit conditions, ensuring it stays above the minimum permissible speed:

where
When either of the above two criteria is met, it is determined to exit the coasting mode.
To ensure driving safety and performance, the coasting decision module incorporates a strict set of boundary conditions and a multi-level safety strategy, particularly for critical scenarios such as long downhill sections.
Level 1 safety (predictive coasting termination): The algorithm continuously predicts if the future vehicle speed will exceed the safety boundary (e.g. speed limit plus a tolerance) while coasting. Upon predicting an overspeed risk, it will proactively terminate the coasting mode immediately.
Level 2 safety (PCC takeover with engine braking): Once coasting is terminated, the PCC controller immediately takes over. At this stage, the controller utilizes engine braking torque (i.e. in-gear coasting) to actively control the vehicle’s speed.
Level 3 safety (retarder engagement): If the prediction indicates that engine braking alone will be insufficient to maintain the speed within the safety boundary on an upcoming steep grade, the control logic will further engage the vehicle’s hydraulic retarder to apply more forceful braking and ensure absolute safety.
The key thresholds for the coasting decision logic (such as for distance and grade) and the hysteresis margin were determined through a systematic, experience-based tuning process. The initial values were set based on statistical analysis of the test driving cycle and the typical dynamic characteristics of heavy-duty trucks on downhill sections. These values were then iteratively refined in simulation via a parametric sensitivity analysis to achieve an optimal balance between maximizing coasting opportunities and ensuring performance and ride smoothness. The specific calibration parameters resulting from this process, which were used for the simulation validation in this study, are listed in Table 5.
Coasting algorithm calibration parameters in simulation.

In summary, under the framework of MPC-based PCC framework, the proposed coasting algorithm leverages multiple signals, including predicted force and speed trajectories, to comprehensively consider the energy consumption performance over the entire driving process. It is designed to perform key functions such as active activation of coasting mode, mode switching between in-gear and neutral coasting, and coasting mode termination. All these functions are performed to further enhance fuel economy without sacrificing the driving and safety performance.
Validation
Following the development of the proposed integrated PCC and coasting scheme, its effectiveness is validated from simulations under various driving scenarios.
Driving scenario
For a meaningful evaluation of the proposed strategy, a driving cycle that represents the primary real-world application scenario for heavy-duty trucks is required. The cruise control function of these vehicles is predominantly used on highways and inter-city routes, which account for the majority of their fuel consumption. Therefore, based on long-distance displacement-grade data collected on highways in our earlier work, a representative driving cycle was constructed. The resulting driving cycle, shown in Figure 6, has a total length of 62 km and comprises various road types, including flat, hilly, and mountainous sections, which account for 1/6, 1/6, and 2/3 of the total length, respectively. 32 This mixed-road condition, which is rich in grade variations, provides an ideal testbed for validating the energy-saving potential of our proposed strategy, whose core mechanism is to leverage such grade information for optimization. All subsequent simulations were conducted using this driving cycle.

Constructed typical road conditions.
Benchmark comparison controller
To ensure a fair and comprehensive validation, three control schemes are compared. It should be noted that both baseline controllers (ACC and PCC) include a basic in-gear coasting function (i.e. fuel cut-off during engine braking), which is a standard feature. The comparison is detailed as follows:
ACC: A conventional rule-based adaptive cruise controller. Its primary goal is to track a set speed or maintain a safe distance from a preceding vehicle. It can passively enter in-gear coasting (fuel cut-off) during deceleration but lacks predictive capabilities;
PCC: A predictive cruise control system that uses previewed information to optimize fuel economy within an MPC framework. Like the ACC, it is limited to passive, single-mode in-gear coasting;
PCC + coast: The proposed controller, which synergizes PCC with an intelligent coasting module. Its key innovations are its active, predictive activation of coasting and its ability to perform multi-mode optimization by deciding between in-gear and neutral coasting to maximize fuel savings.
Simulation results and analysis
Due to the significant variations in operating conditions for heavy-duty trucks, such as vehicle speed varying over a wide range or vehicle weight differing significantly between empty and full load, the following simulation analysis focuses on two key aspects: (1) Fixed vehicle weight at full load 49 t, compare simulation results under different cruising speeds. (2) Fixed vehicle speed at 80 km/h, compare simulation results under different vehicle weights.
Working scenario 1: Fixed vehicle weight and comparison at different speeds
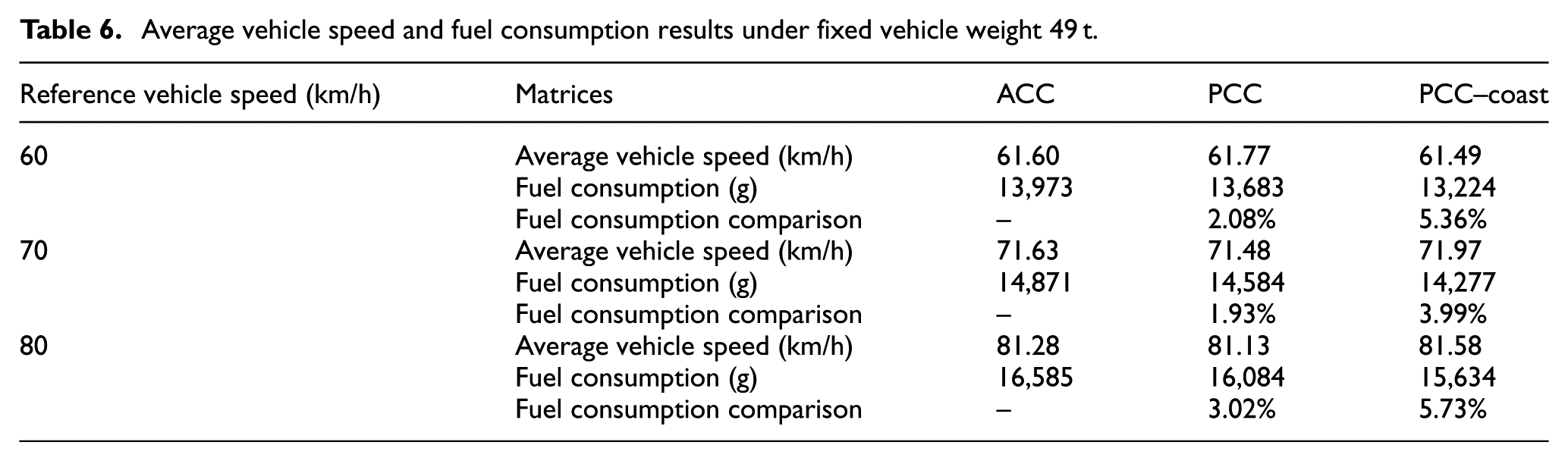
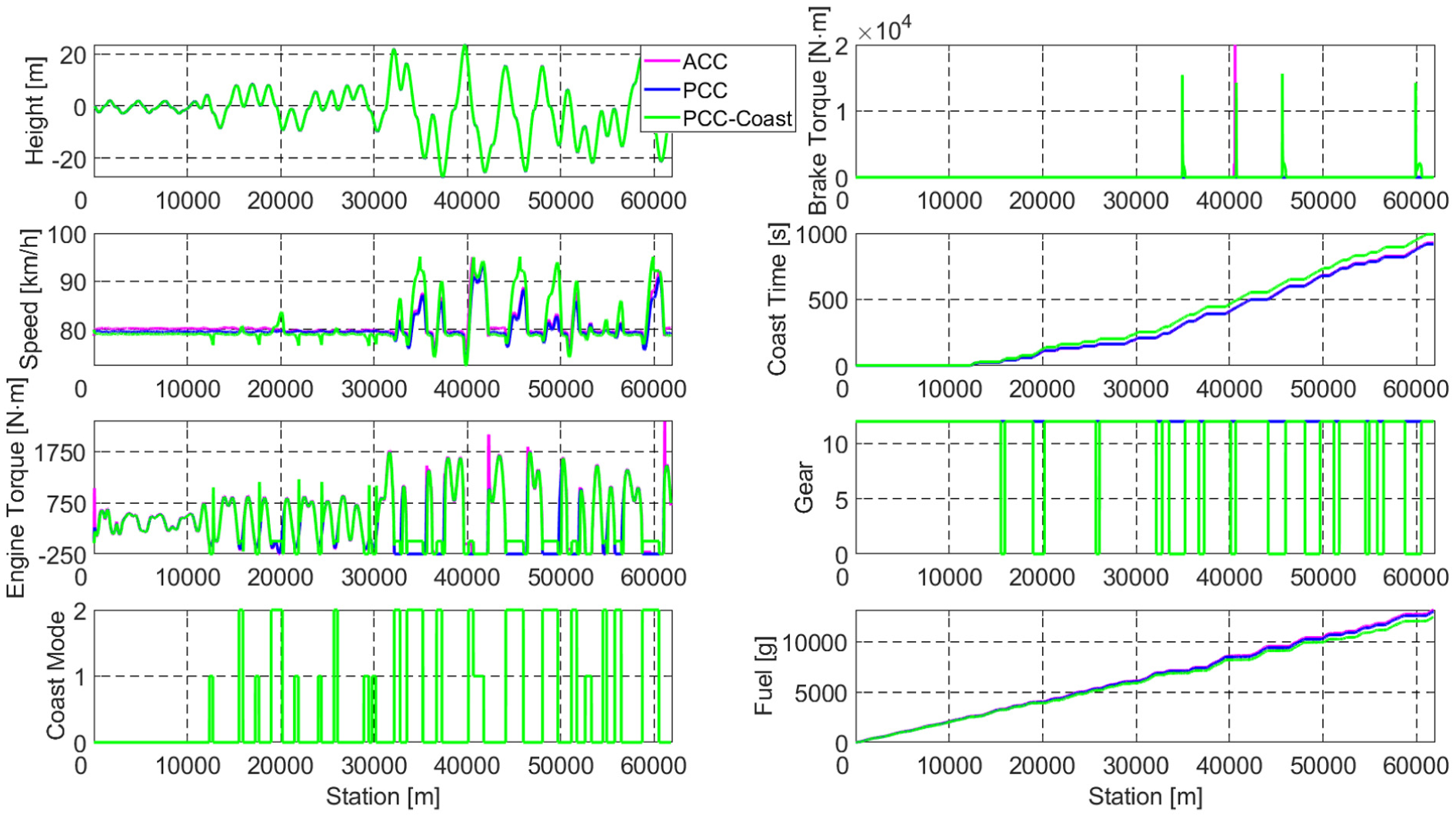
This section presents the simulation comparison results for a fixed vehicle weight at full load (49 t) across different cruising speeds (60, 70, and 80 km/h). For clarity and readability, only the graphical comparison results for the 80 km/h case are shown here in Figure 7, as the results for the 60 and 70 km/h cases exhibit similar trends. As illustrated in Figure 7, the proposed PCC–coast strategy frequently activates the coasting mode, resulting in periods of zero engine torque and a visibly lower cumulative fuel consumption compared to the ACC and PCC baselines. Detailed comparative results regarding average vehicle speed and fuel consumption across all tested speeds are summarized in Table 6 and Figure 8.

Fixed vehicle weight and comparison result curves at vehicle speed 80 km/h.
Average vehicle speed and fuel consumption results under fixed vehicle weight 49 t.

Results and comparison of fuel consumption under fixed vehicle weight 49 t.
It can be observed from the simulation results comparison across different cruising speeds that the maximum deviation in average vehicle speed among the three control algorithms is <0.7% regardless of the speed level, implying consistent vehicle performance. On this basis, the PCC–coast control strategy exhibits a tendency to prioritize neutral coasting on downhill slopes, this is because neutral coasting can lead to a longer coasting distance and reduced deceleration compared to in-gear coasting. Note that, for the coasting time statistical method, the vehicle is considered to be in coasting mode when engine torque is <0 and brake torque is zero. Based on this definition, both ACC and conventional PCC strategies also exhibit a limited coasting capability (similar to in-gear coasting). However, the total coasting time achieved by the PCC–coast strategy is consistently and significantly longer than that of ACC and conventional PCC, which is identified as the primary reason for the observed improvement in fuel saving rate.
The specific energy consumption data comparison shown in Table 6 concluded that under the condition of full load 49 t, compared with the traditional ACC algorithm, the PCC algorithm without coasting mode has an energy saving rate between 2.06% and 3.28% in the speed range of 60–80 km/h, highlighting its inherent advantages of using preview information for predicting speed curve optimization. On this basis, the integrated solution proposed in this paper further improves the energy saving rate by at least 2% compared to the PCC algorithm without coasting mode, and achieves an energy saving rate of 3.99%–5.73% compared to the traditional ACC algorithm.
Working scenario 2: Fixed vehicle speed and comparison at different weights
Considering the wide range of vehicle weight variation for heavy-duty trucks from empty to full load, further simulations were conducted at a fixed speed (80 km/h) for different vehicle weights (empty load 15 t, medium load 30 t and full load 49 t). The results are presented in Figures 9 and 10 and Table 7. Similarly, for clarity, only the curve comparison results for the 30-t case are shown here, as the results for the 15 and 49 t cases exhibit similar trends.
Fixed vehicle weight and comparison result curves at vehicle weight 30 t.

Results and comparison of fuel consumption under fixed vehicle speed 80 km/h.
Average vehicle speed and fuel consumption results under fixed vehicle speed 80 km/h.

From Table 7 and Figure 10, it can be observed that while maintaining consistent vehicle power performance (with a maximum average speed deviation of 0.71%), the proposed PCC algorithm integrated with coasting functions achieves a fuel economy improvement ranging from 2.23% to 5.73% compared to the conventional ACC algorithm across the tested load range (15–49 t). Besides, compared to the conventional PCC without coasting, this approach leverages an additional fuel saving potential of 1.88%–3.02%.
Furthermore, the data in Table 7 also indicate that the fuel economy benefit of the PCC–coast strategy increases with increasing vehicle weight. This is attributable to the fact that heavier vehicles store significantly more kinetic energy (inertia) and possess greater gravitational potential energy on downhill sections. This is a crucial insight for heavy-duty applications: the high kinetic energy makes predictive coasting phases (on flat or slight inclines) far more effective and longer-lasting, while the high potential energy maximizes the gains from downhill coasting. This combined characteristic is particularly advantageous for heavy-duty trucks, as they are frequently operated at full load to maximize operating revenue.
In conclusion, these simulation results convincingly demonstrate the effectiveness of the proposed integrated predictive control and coasting strategy, which intelligently identifying and leveraging optimal coasting opportunities within the predicted trajectory, leading to significant fuel economy improvements for heavy-duty vehicles under realistic operating conditions.
Conclusion and future work
Addressing the critical issue of fuel efficiency in heavy-duty trucks, this paper proposes a novel method that integrates an energy-saving coasting strategy into a PCC system. This algorithm achieves intelligent control of coasting modes by leveraging predicted driving force and speed trajectories along with preview road information. Key features include:
Smooth activation: Enables active and smooth transition into coasting mode based on the predicted low tractive force demand.
Mode optimization: Employs an “equivalent energy consumption” method to comprehensively evaluate in-gear and neutral coasting modes, aims to maximize overall energy saving while ensuring safety and preventing excessive post-coasting acceleration caused by insufficient speed.
Intelligent termination: Comparing the MPC-predicted speed profile with the predicted coasting speed trajectory, further informed by future map information to determine the optimal exit timing.
Preliminary evaluation through simulation-based testing under various typical operating scenarios demonstrate the potential energy saving rate of the proposed method. Results indicate that the algorithm achieves an additional fuel saving of up to 5.73% compared to conventional PCC system. To illustrate this, for a typical heavy-duty truck with an annual mileage of 150,000 km and an average fuel consumption of 30 L/100 km, this 5.73% saving would translate to ∼2578 l of fuel saved per vehicle annually. Based on the emission factor of 2.63 kg of CO2/l of diesel, 33 this also represents a significant environmental benefit, corresponding to an annual reduction of ∼6.8 t of CO2 emissions per truck. This result demonstrates the significant economic and climate mitigation potential of the proposed strategy.
Future work will aim to address the limitations of the current study by validating and enhancing the algorithm in more complex and diverse driving scenarios, such as dense urban traffic with frequent stops and mountainous roads with extended downhill sections. Furthermore, a key research direction will be to enhance the controller’s robustness by developing adaptive algorithms for the online estimation of key variables, including vehicle mass and road friction, as well as other real-world uncertainties like the aerodynamic drag coefficient. Finally, a more comprehensive analysis of the strategy’s impact on other regulated emissions, including the complex trade-offs between fuel economy and NOx/PM formation, will be investigated to ensure a holistic environmental benefit.
Footnotes
Handling Editor: Chenhui Liang
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by the National Natural Science Foundation of China under Grant 62473291 and partly by the Chaoyong Program of the International Campus, Zhejiang University.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
All data that support the findings of this study are included within the article (any supplementary data will be available upon reasonable request).