
Abstract
Addressing the multi-stage characteristics of rolling bearing degradation with random change points, this paper proposes a novel method for predicting the Remaining Useful Life (RUL) of multi-stage degradation processes. Initially, the prior parameters of each stage model are estimated using offline historical data. Then, for a single online device, real-time change point detection is performed using the Bayesian change point detection method. The Bayesian updating approach is adopted to update the parameters of the first stage before the change point occurs and the second stage after the change point. Subsequently, the multi-stage model is utilized for RUL prediction. Numerical simulations and case studies have shown that the rolling bearing life prediction method based on Bayesian change point detection can improve change point detection accuracy by 85%, thereby achieving high-precision multi-stage RUL prediction.
Keywords
Introduction
Rolling bearings, as the most common and extremely crucial rotating components in industrial equipment, are widely applied in rotating machinery such as motors, gearboxes, and turbines. Whether their operation status is normal directly affects the performance of the entire equipment.1,2 During the operation process, due to the influence of internal factors (such as sudden changes in the degradation mechanism) or external factors (changes in load, working conditions, etc.), the degradation characteristics of rolling bearings also change accordingly, thereby multi-stage characteristics often occur.3,4 As shown in Figure 1, three typical stages are clearly observed during the operation of this bearing: early stage—slow degradation period, middle stage—moderate degradation period, and late stage—rapid degradation period.

The three-stage degradation process of rolling bearing.
The Wiener process is a type of diffusion process with a linear drift term. Due to its excellent mathematical properties, it has been widely used in equipment reliability prediction and life analysis since the 1990s.5,6 In recent years, continuous new progress has been made. Peng and Tseng 7 established a cumulative degradation model, studied the degradation modeling and prediction model within a linear framework, and derived the explicit solution of the life distribution. Lee and Tang 8 proposed an improved EM algorithm to estimate the parameters in the degradation process. Joseph and Yu 9 conducted research on the nonlinear degradation model, which can be linearized under certain conditions, and they also studied the degradation modeling problem considering the data correlation. However, all the above methods utilize the historical monitoring data of the service lives of similar equipment and do not make use of the monitoring degradation data during the operation of the in-service equipment. In order to overcome this problem, Gebraeel et al. 10 proposed a stochastic degradation modeling method under the Bayesian framework. After obtaining the degradation monitoring data, the Bayesian method is used to update the stochastic parameters of the model, obtain their posterior estimates, and then predict the probability distribution of the remaining useful life. Shi and Xue 11 proposed a method for predicting the remaining useful life that integrates the prior degradation data and the on-site degradation data of the equipment itself, established an equipment degradation model that conforms to the description of the nonlinear Wiener process.
Currently, there have been many studies on the degradation modeling and life prediction of equipment with typical multi-stage degradation characteristics.12,13 Ng 14 proposed a two-stage independent increment degradation model with independent increments based on a single change point. Wang et al. 15 proposed a two-stage bearing degradation modeling combining the EM algorithm and Kalman filter for adaptive prediction. Dong et al. 16 proposed a method for predicting the Remaining Useful Life (RUL) based on a two-stage adaptive Wiener process. For the degradation modeling of multi-stage processes, the key lies in accurately detecting the points where the degradation rules change, that is, the change points. 16 For the typical three-stage bearing degradation process, generally, the time point of the occurrence of the second stage is taken as the initial fault point, which is also called the First Prediction Time (FPT), and the degradation process modeling is carried out with the subsequent two stages (the middle and late stages) as the targets. Figure 2 shows the typical two-stage degradation process of a rolling bearing. Under the condition of determining the failure threshold, its real life is point A in the figure. At present, the main problems existing in the real-time online life prediction of the multi-stage degradation process are as follows:

Error analysis of RUL based on two-stage degradation process.
If the change points in the degradation process are not taken into account, that is, the process is regarded as a single process, it will lead to a very large prediction error. For example, in Figure 2, the predicted life at point A1 has a huge gap from the real life at point A.
When considering the change points and treating the process as a two-stage process, the prediction accuracy of the change points is very important. For example, in Figure 2, owing to the prediction error of the change points, the estimated life prediction point is located at point A2, resulting in a large error.
At the same time, the current multi-stage degradation modeling and prediction are not suitable for online life prediction, real-time change point detection and real-time remaining useful life prediction cannot be carried out.
Statistical change point analysis theory, which focuses on modeling abrupt changes in real-world processes, is a nonlinear statistical framework that has witnessed substantial advancements in both theoretical development and practical applications in recent years.13,15,16
Current mainstream methodologies for change point detection include the Pettitt method, 17 Bayesian testing approaches, 18 and the cumulative sum (CUSUM) test. 19 The Pettitt, a nonparametric approach for change-point detection, examines the relative ranks of all pairwise comparisons within the time series. This distribution-free method is particularly valuable as it requires no prior knowledge of the underlying data distribution and maintains robustness across different time series types. However, the Pettitt test exhibits certain drawbacks, including reduced accuracy in identifying multiple change-points and heightened sensitivity to both the time series length and the position of the change point(s). 17 The CUSUM test, on the other hand, requires a large dataset to construct test statistics, which limits its accuracy when applied to small sample sizes. In contrast, Bayesian change point detection methods, under appropriate prior assumptions, can effectively identify change points with relatively high precision while meeting the requirements for real-time detection capabilities.
In response to the above analysis, this paper proposes a novel adaptive change point detection-based RUL prediction method for bearing degradation models. First, parameter learning is conducted using historical data to determine the prior values of change point distribution patterns, followed by the estimation of drift and diffusion coefficients for different stages. By applying change point detection to the collected degradation observation data, the observation sequence is partitioned into multiple segments. Starting from the FPT, online life prediction is performed. Both simulation experiments and real-world case studies validate the prediction accuracy and practical applicability of the proposed method.
Problem description
Let

Let

The tasks of real-time online life prediction are: Estimate the current change-point
Two-stage degradation process model
For the typical three-stage rolling bearing degradation process, since the first stage operates smoothly, remaining life prediction is generally not performed. This paper establishes a two-stage degradation process model focusing on the latter two stages of rolling bearings. The following assumptions are made:
The rolling bearing degradation process starts from the FPT, with all prediction objects having two typical degradation stages, namely the moderate degradation stage (Stage 1) and the rapid degradation stage (Stage 2); Each stage is a linear Wiener process.
Two-stage Wiener linear model
Based on the above assumptions, the studied degradation process model is expressed as:

In the formula,
The RUL distribution of the two-stage degradation process
Based on the above assumptions, the RUL Probability Density Function (PDF) of the two-stage degradation process model studied in this paper can be expressed as 20 :

Where

The PDF at time
Where

Where
Offline parameter estimation
Considering that there are a total of
Using MLE (Maximum Likelihood Estimation) to estimate its parameters, first let

The maximum likelihood estimate of parameter

Using the values of
The PDF of degradation increments
For the standard Wiener process
Then PDF of

Here, the prior distribution of
If the hyperparameters (m, v, a, B) are defined, then:

where
Bayesian change point detection
Bayesian change point detection is an online change point detection algorithm,
18
determining whether a change point
Change point detection method
Bayesian change point detection models the run length
The probability that the degradation pattern of the device changes (i.e. a change point

Among them,
According to the given variable length

Here,

The joint probability

From equations (20). and (21), we obtain the recursive formula for posterior probability of

Note that, according to the properties of conditional independence, the predictive distribution
According to equation (22), the current time

Conjugate exponential distribution
For the convenience of calculation, assume that the degenerate increment

The likelihood function form of the exponential distribution is:

The calculated marginal distribution is a

Thus, the recursive formula for the predicted distribution probability

In the equation,
Bayesian change point detection algorithm
Algorithm 1: Bayesian Change Point Detection Algorithm:
Step 1: Initialize
Step 2: Obtain a new set of degraded incremental data
Step 3: Calculate the predicted distribution probability
Step 4: Calculate the growth probability
Step 5: Calculate the change point probability
Step 6: Calculate the evidence
Step 7: Determine the posterior distribution
Step 8: Determine the change point according to equation (18)
Step 9: Update the hyperparameters according to equation (21), switch to Step 2.
Bayesian change point detection based RUL prediction
RUL prediction flowchart
Figure 3 illustrates the flowchart of the Bayesian change point detection-based RUL prediction method for rolling bearings. The process begins with offline historical data from multiple homogeneous bearings to construct a multi-stage degradation model, where prior parameters are estimated via maximum likelihood estimation (MLE).

Flowchart of Bayesian change point detection-based RUL prediction.
For online prediction, real-time monitoring data from a target bearing is used to compute degradement increments. The Bayesian framework then evaluates whether a change point (e.g. degradation stage transition) occurs by calculating posterior probabilities and separating growth and change point probabilities. If detected, model parameters are updated in real-time. Finally, the RUL is predicted as a PDF based on the first passage time of the degradation trajectory crossing a failure threshold. This approach integrates offline learning with online adaptation, enhancing RUL prediction accuracy for rolling bearings.
Online parameter update
For real-time RUL prediction of a single rolling bearing, to fully utilize the online collected data, Bayesian theory can be employed for online parameter updating, with the bearing monitoring at the current time
Let
When

Where,

When

Where

RUL prediction algorithm
Algorithm 2: Multi-stage Degradation RUL Prediction Algorithm:
Step 1: Based on multiple sets of historical data, use equation (10) to determine the prior distribution of the hyperparameters where the common parameters (including change point
Step 2: For a specific degrading device, observe the latest data
Step 3: Use Algorithm 1 to calculate
If there are no change points, handle it in two cases:
Case 1: When
Case 2: When
If a change point occurs at the current time
Step 4: Use the latest change point
Step 5: According to formula (25), use all obtained parameters to calculate the remaining life PDF of the device.
Step 6: Return to Step 2 until the prediction process is complete.
Simulation validation
The numerical simulation model is as shown in equation (3), where
During numerical simulation, consider that the drift coefficient exhibits random effects, with parameters
Offline parameter estimation results.

Figure 4 shows the simulation sample trajectories with a sample size of

Simulated degradation data (150 groups).

Change point distribution.
First, the remaining 149 samples except for sample 6 were used as offline data for prior parameter estimation, and the results are shown in Table 1. Figure 6 shows the degradation trend of sample 6, and Figure 7 displays the

Degradation trajectory of sample 6.
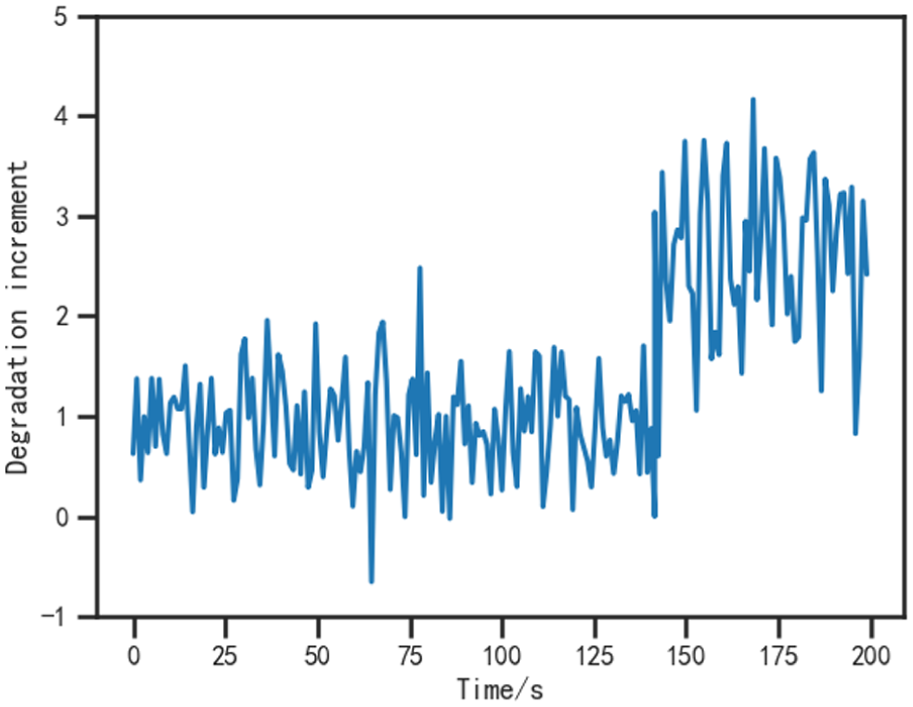
The degradation increment trajectory of sample 6.

Prediction results of change points for sample 6
To validate the superiority of the proposed change-point detection method, we conducted comparative experiments on the aforementioned 150 simulated sample groups using three different change-point detection methods: Method A (Bayesian approach), Method B (Pettitt’s non-parametric method), and Method C (CUSUM). Notably, Methods A and C were implemented with optimized parameters as specified in Table 2.
Change point detection results comparison.

Figure 9 presents the accuracy comparison of the three methods. In terms of prediction error ranges, the proposed Bayesian change-point detection method (Method A) demonstrated the highest precision with errors confined between 0 and −6. The Pettitt method (Method B) showed errors ranging from 0 to 28, while the CUSUM method (Method C) exhibited fluctuating errors between −20 and 20. Quantitatively, the Bayesian method achieved approximately 78.5% and 85% accuracy improvements over the Pettitt and CUSUM methods, respectively. Furthermore, Figure 9 reveals that as change-points occur later in longer time series, both Pettitt and CUSUM methods tend to produce larger prediction errors.
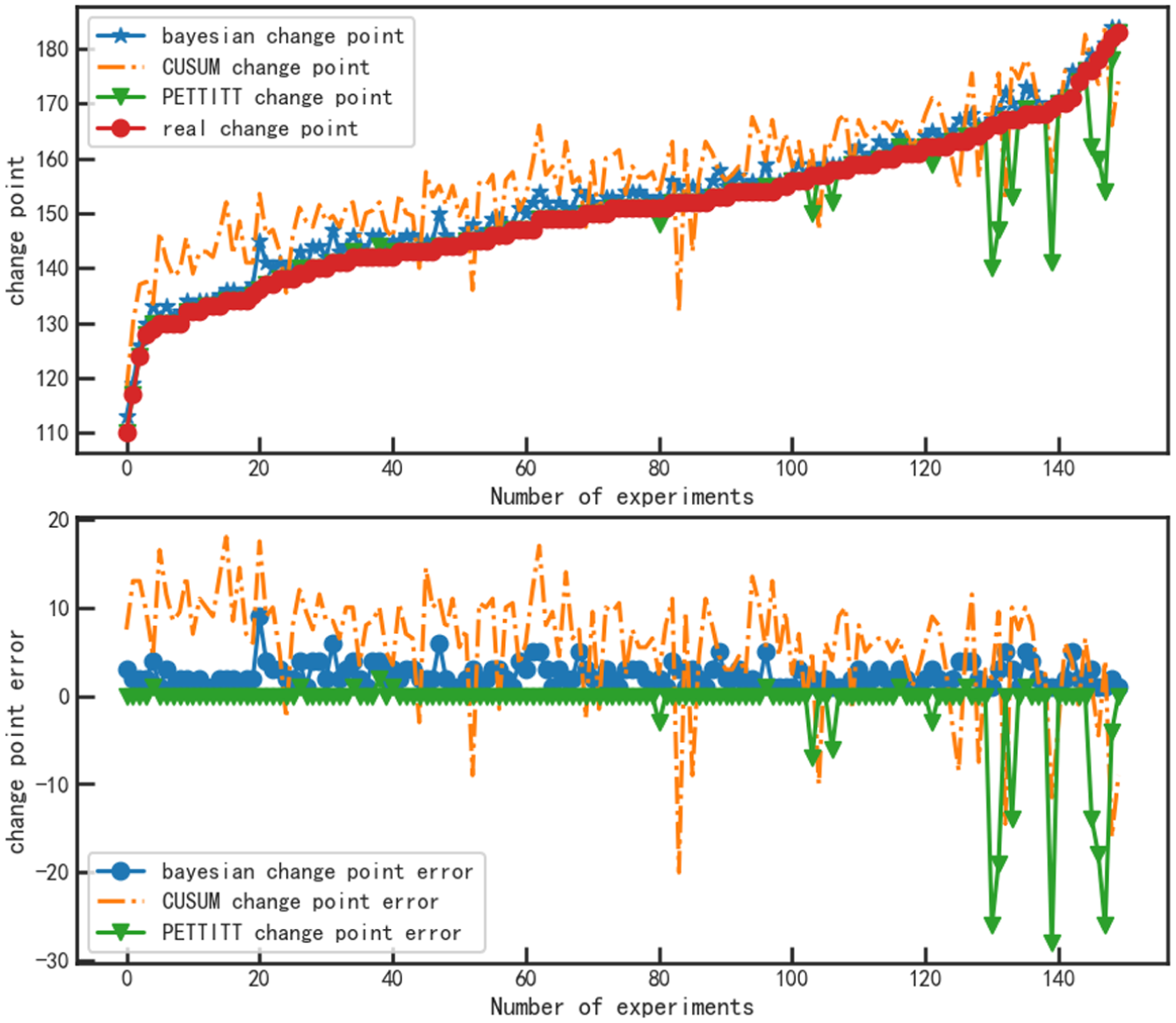
Error analysis of three change-point detection methods.
Figure 10 analyzes the impact of change-point prediction errors on remaining useful life (RUL) estimation. The results demonstrate that: (1) RUL prediction errors increase with larger change-point detection errors, and (2) negative change point prediction errors (indicating premature detection) lead to more significant RUL estimation inaccuracies.

Impact of change point errors on RUL predictions.
Combining the analyses from Figure 9, we observe that the Bayesian method consistently produces smaller lagging errors in change-point detection. Compared to the Pettitt method, this characteristic enables the Bayesian-based approach to significantly enhance RUL prediction accuracy.
Figure 10 analyzes the impact of change point prediction errors on RUL predictions. When the change in predicted change point error ranges from −12 to 12, the figure shows:
(1) The error in RUL predictions increases with the change point prediction error;
(2) When the change point prediction error is negative (predicted change points ahead of actual change points), the error in life predictions is more significant. Combining the analysis of Figure 9, it can be concluded that the Bayesian change point detection method, due to its lagging errors and relatively small error values, helps improve the accuracy of RUL predictions compared to the Pettitt and CUSUM method.
For sample 6, the degradation threshold is

RUL results of sample 6.

RUL PDF of sample 6.
Case study
The sample data comes from the bearing dataset XJTU-SY,
22
which contains vibration signal data of 15 rolling bearings over their full life cycle under three different operating conditions. The test setup comprises an AC motor, a motor speed controller, a shaft, supporting bearings, a hydraulic loading system, and the test bearings. The model of the experimental bearing is LDK UER204 rolling bearing. In the test setup, the bearing vibration sampling frequency is
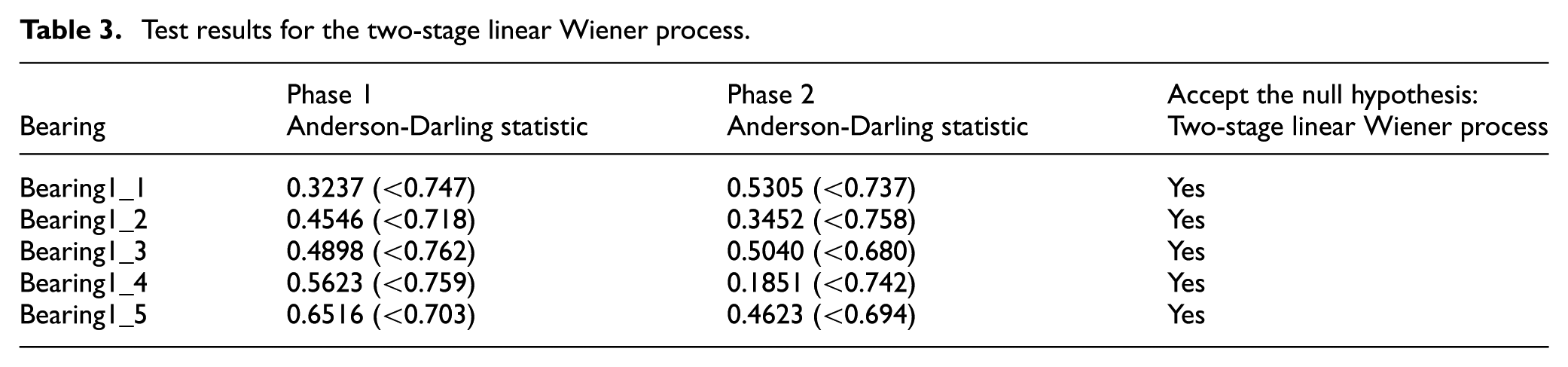
Five sets of full-lifecycle degradation data (Bearing1_1, Bearing1_2, Bearing1_3, Bearing1_4, and Bearing1_5) were selected from the degradation database. The kurtosis index was chosen as the degradation indicator. After defining a dimensionless maximum kurtosis value of 30, the indicator was normalized to a 0–1 scale. Data from the latter two stages of the bearing degradation lifecycle (i.e. the medium-term degradation and late-term degradation stages) were retained, and the resulting degradation curves are shown in Figure 13. Next, we examined whether the degradation data conform to the two-stage linear Wiener process model (as shown in equation (3)). The method for testing whether a process fits a linear Wiener process is as follows: first, difference the degradation curve, and then, at a significance level of 0.05, verify whether the differenced signal satisfies the normality assumption. Initially, the five sets of degradation curves were assumed to follow a single linear Wiener process. The Anderson-Darling (AD) test was applied to the entire set of five curves. The AD test statistics for the five datasets were [13.8657, 5.4448, 6.9816, 17.8811, 6.9216], all exceeding the 5% critical values [0.762, 0.765, 0.765, 0.742, 0.733]. This indicates that the curves do not conform to the assumption of a single linear Wiener process. Using any of the three aforementioned methods (Bayesian, Pettitt, or CUSUM), optimal change points were detected for the five datasets. Each curve was segmented into two phases based on the detected change point. The two segments (Phase 1 and Phase 2) were then separately tested for adherence to a linear Wiener process. The change point locations and AD test results are summarized in Table 3. The results show that after segmentation, the AD test statistics for both segments of each curve are lower than the 5% critical values, meaning the null hypothesis cannot be rejected. This confirms that both segments of the degradation curves after segmentation conform to a linear Wiener process.

Degradation trend of rolling bearings (bearing1_1–bearing1_5).
Test results for the two-stage linear Wiener process.
To validate the effectiveness of the proposed method, two state-of-the-art lifespan prediction approaches were selected for comparison. Method 1, proposed in Gebraeel et al., 10 employs a Bayesian updating approach based on a Brownian motion with error process to predict the remaining useful life distribution of equipment using real-time degradation signals. Method 2, introduced in Zhang et al., 19 is a multi-stage stochastic degradation modeling approach for lifespan prediction that utilizes CUSUM-based change point detection. The proposed Bayesian change point detection method in this paper is designated as Method 3. The model error is defined as the Maximum Absolute Error (MAE), which is the sum of the absolute values of multiple lifespan prediction errors.
For the comparative experiments involving the three methods, four sets of degradation bearing data (Bearing1_2, Bearing1_3, Bearing1_4, and Bearing1_5) were selected as offline data, with Bearing1_1 used as the online bearing. Based on the monitored data up to each time point (t k ), the probability density function (PDF) of the remaining useful life (RUL) and the point estimate of the lifespan were predicted.
The degradation curve (excluding the early slow degradation data of the rolling bearing) is shown in Figure 13, and the failure threshold is set to 0.9.
In method 3, the prior parameters of the model were estimated to be:

Bayesian change point detection result (bearing1_1): (a) predicted mean and variance and (b) probability of change point.

RUL prediction results.

RUL PDF of Method 1.
For the remaining useful life (RUL) prediction of Bearing1_1, a comparison of the results from the three methods is shown in Table 3, with visualizations provided in Figures 15 to 18. Analysis of the outcomes reveals that Method 1, based on a single-stage model, produces substantial errors in RUL prediction, with forecasts at certain time points reaching unacceptable levels. In contrast, both Method 2 and Method 3, which incorporate change point detection, generally achieve smaller prediction errors. However, the change point identified by the CUSUM-based Method 2 occurs at 68 (with an 8-point lag), resulting in overall larger prediction errors. As can be seen from Table 4, its MAE value is 907, whereas the MAE of the proposed method is 408, demonstrating the best prediction performance.

RUL PDF of Method 2.

RUL PDF of Method 3 (Proposed).
Prediction errors and comparison of the three methods.

Conclusion
In response to the multi-stage characteristics of random change points in the operational degradation process of rolling bearings, this paper proposes a novel multi-stage RUL prediction method based on Bayesian change point detection. Through analysis and experimental validation, the following conclusions are drawn:
(1) The proposed life prediction method employs Bayesian change point detection, which improves the accuracy of change point detection by 85% compared to other methods, thereby enabling high-precision multi-stage RUL prediction.
(2) his method is applicable throughout the entire lifecycle of bearing degradation, including both before and after the occurrence of change points. Particularly in the first stage (before the change point), it leverages prior estimates of change points and second-stage parameters derived from offline data to achieve relatively accurate RUL predictions.
(3) The proposed method adopts online inference for prediction, where change points are detected by generating the precise distribution of the next unobserved data point given the observed sequence. This approach belongs to real-time online change point detection and, when combined with real-time parameter updating, can be applied to online RUL prediction.
Footnotes
Handling Editor: Chenhui Liang
Author contributions
Wenping Lei., Conceptualization, Investigation, and Writing—original draft preparation; Wangshen Hao., Investigation, Software and Formal analysis; Chenyang Li, Writing—original draft preparation, Software, Supervision; Yifei Zhang, Software, Visualization, Formal analysis, Visualization. All authors have read and agreed to the published version of the manuscript.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by the National Natural Science Foundation of China (51775515).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.