
Abstract
The vibration control of the cylindrical shell carrying internal machine and isolator is of significant interest to underwater vehicles. The metamaterial isolator that combines Bragg bandgap and local resonant bandgap, namely periodic isolator with embedded absorber, is proposed to reduce the vibration transmission in the cylindrical shell carrying internal machine. For predicting the vibration behavior of the cylindrical shell with internal machine and periodic isolator with embedded absorber, a analytical method (AM) is proposed. The internal machine and the periodic isolator with embedded absorber are both modeled as one-dimension dynamic model using transfer matrix method. The exact three-dimensional modeling of the cylindrical shell is established based on Flügge shell theory. The accuracy of the proposed AM is validated by comparing to the finite element method (FEM). The vibration response of the cylindrical shell carrying internal machine and periodic isolator with embedded absorber is analyzed comparing with those of the continuous isolator and the periodic isolator. In addition, the wave propagation characteristics of those isolators are compared, which explains the bandgap characteristics. The parametric analysis are conducted for identifying the influence of dynamic parameters on bandgaps characteristic of the periodic isolator with embedded absorber.
Introduction
Vibration control method of the cylindrical shell carrying internal machine and isolator already has wide applications in engineering.1–3 For example, the power cabin or pressure housing of underwater vehicles4,5 is composed of cylindrical shell and its internal machine and vibration isolator. The vibration isolator is used for preventing the vibration of machine transferring to the cylindrical shell, which further cause sound radiation. 6 Traditional isolators have shown significant effectiveness in isolating mechanical vibration transmission at middle and high frequencies. 7 Most of mechanical systems currently have multi-source excitation characteristics, 8 and the vibration response in certain specific frequency bands is much greater than that in other frequency bands. However, traditional isolators perform poor vibration energy attenuation for specific frequency bands as the vibration energy attenuation effect is evenly distributed throughout the entire frequency band. To solve this problem, scholars improve the vibration isolation performance through various method, such as introducing the concepts of vibration absorber, 9 energy sink, 10 and metamaterial structure. 11 Among these, the integration of vibration isolator and metamaterials could generate a functionally enhanced isolator, rather than adding other structures to the original system. Man-made metamaterials is a type of materials which exists particular physical property that regulate vibration wave in a given frequency band, namely as stop band. According to the mechanism of bandgap formation,12,13 metamaterials are mainly divided into two types: Bragg metamaterials and localized resonance metamaterials. Metamaterial structures containing multiple bandgaps,14,15 such as those with both local resonance type and Bragg type bandgaps, can achieve wideband frequency isolation effects. Therefore, it is necessary to propose a novel vibration isolator by combining metamaterials existing multi-bandgaps and develop a theoretical analysis method of the vibration behaviors of the cylindrical shell carrying the internal machine and metamaterial structure.
The latest literature shows that scholars put forward to design different types of vibration isolators made of man-made metamaterials, which behave better wave filtering characteristics in the demanded frequency bands. Rai et al. 16 designed a monolithic periodic plate stack isolator achieving low frequency bandgaps based on the concept of the antiresonance isolation. Lyu et al. 17 proposed a kind of vibration isolation system containing periodic acoustic black holes to achieve ultrawide vibration and shock attenuation for spacecraft. An et al. 18 studied a meta-truss lattice structure with different cross sections based on the FEM analysis and experimental method. The meta-truss lattice structure is used as vibration isolator with two broadband bandgaps in the range of 1000–5000 Hz for large vibration attenuation. Lin et al. 19 proposed a mechatronic metamaterial beam shunted with inductor-resistor-capacitor (LRC) shunting circuits, which achieves tunable bandgaps in a certain frequency range. Li et al. 20 designed a hollow-tube core lattice sandwich structure which enhances the low-frequency vibration isolation performance through vibration reduction mechanism of the local resonance and the Bragg scattering bandgaps.
Although the structural forms of metamaterial isolators are diverse, the dynamic model can be simplified to a simple periodic mass spring array structure. For the modeling of isolator, the traditional continuous isolator generally modeled as spring-damper system 21 that ignores the effects of the mass and elastic deformation of isolator on its isolation performance. The dynamic model of metamaterial isolator with discontinuous structural property could be represented as combination system of spring-damper and mass. 22 One kind of metamaterial isolator is modeled as mass unit and spring unit connected in series, 23 where periodic layered isolator24,25 and rods or beams isolator with periodic insertions26,27 are typical structural design form of this type. The periodic layered isolator and rods and beams isolator with periodic insertions have excellent broadband wave attenuation at middle and high frequencies, which is a representative of the Bragg bandgap. Another kind of metamaterial isolator is modeled as attached mass-spring unit periodically, where periodic lattice structure28–31 is typical structural design form of this type. The periodic lattice structure has a narrow low-frequency locally resonant bandgap due to the vibration energy absorption from internal absorbers. The combination of the periodic vibration isolator and internal absorbers 32 have been explored to achieve more bandgaps since the combination of Bragg bandgap and locally resonant bandgap.
The dynamic model study of the cylindrical shell with internal machine and metamaterial isolator provides a fast and accurate analytical method for the vibration isolation effect evaluation of the metamaterial isolator. Compared with the finite element method, the analytical method does not require mesh generation of the model and large computation base on the finite element model which saves computational resources and time, especially in the case of large-scale model in the full frequency band. Ma et al. 33 presented an analytical method for the cylindrical shell with internal active double-layer vibration isolation structure and the corresponding control strategies. Qu et al. 6 predicted the vibration and acoustic behaviors of the cylindrical shell with internal machine and nonlinear isolator based on the modified variational method and time-domain Kirchhoff boundary integral formulation. Huang et al. 11 established the dynamic model of the cylindrical shell structure multi-connecting internal isolation system based on transfer matrix method. Jia et al. 34 developed a semi-analytical method of a submerged ring-stiffened cylindrical shell coupled with arbitrary inner structures, which the stiffened cylindrical shell is analyzed by analytical method and the inner structure is analyzed by numerical approach. Wu and Sun 35 predicted the dynamic behavior of a pipe systems coupled to hull structures, in which the hull structure can be simplified to a conical-stiffened cylindrical-hemisphere shell. Tian et al. 36 studied the vibration characteristics of a cylindrical shell coupled with an internal flexural floor structure through a hybrid analytical-numerical formulation, which the cylindrical shell is modeled based on dynamic stiffness method and the floor is modeled by finite element method.
From the above, the metamaterials isolators with multi-bandgaps have the potential in broadband vibration isolation. However, most theoretical investigations have concentrated on either the vibration characteristics of the cylindrical shell with internal machine and simple vibration isolator. There is almost no literature about the vibration analytical modeling of the cylindrical shell carrying internal machine and metamaterial isolator with multi bandgaps. The main objective of this paper is to develop an analytical dynamic model to evaluate the dynamic behaviors of the cylindrical shell carrying internal machine and two types metamaterial isolators, and further to assess the vibration isolation performance and bandgaps characteristics of the two types metamaterial isolators. The two types metamaterial isolators are respectively periodic isolator and the periodic isolator with embedded absorber which contains multi-bandgaps. In this paper, the analytical analysis approach of the cylindrical shell carrying internal machine and various metamaterial isolator is proposed based on transfer matrix method and Flügge shell theory. The correctness of the analytical method is verified by the finite element method through comparing the results of the vibration response, natural frequencies, and displacement map. The vibration isolation performances of the two different metamaterial isolators on the cylindrical shell carrying internal machine are analyzed comparing with that of the continuous isolator. Furthermore, the parametric analysis of the two types metamaterial isolators on the vibration characteristics of the cylindrical shell and the bandgaps characteristics are studied.
Theoretical model
Model configuration
The vibration characteristics of the cylindrical shell carrying internal mechanical metamaterial isolation system is generally influenced by both the vibration source characteristic of the internal machine and the vibration transmission characteristic of the isolator. Moreover, evaluating the vibration isolation performance of the periodic isolator also should consider the elastic influence of the cylindrical shell. Therefore, it is crucial to establish a dynamic model which contains the whole structure of the cylindrical shell carrying internal mechanical metamaterial isolation system. Figure 1 depicts the model simplification diagram of the finite length cylindrical shell with the internal machine and the two types of metamaterial isolators. The cylindrical shell with the internal machine and the metamaterial isolator is generally divided into two subsystems: mechanical metamaterial isolation system and the cylindrical shell. The internal machine is assumed as the lumped mass unit due to the more precise model of the machine, such as a six-degree-freedom model, has minimal effect. This is because the two periodic vibration isolators in this paper primarily enhance the vibration isolation performance in the vertical direction. The elastic property of the machine is neglected in the simplified model since the machine could not simply modeled as simple elastic structure like beam, plate, or cylindrical shell. The elastic modeling of machine is overly complex which is not considered in this paper. The two types of metamaterial isolators are modeled based on the lumped parameters method, namely the periodic isolator and the periodic isolator with embedded absorber respectively. The periodic isolator is represented by periodical spring-mass (m1–k1) units. The periodic isolator with embedded absorber is represented by periodical spring-mass (m1–k1) units in which the mass m1 embeds a vibration absorber (m2–k2). For the sake of simplicity, the excitation force on machine considers the vertical direction, and the periodic isolator considers the one-dimensional motion. Furthermore, although external hydrodynamic loads are a critical factor in the overall dynamic behavior of the cylindrical shell, their impact on the vibration isolation performance of metamaterial isolators may be negligible. Therefore, fluid-structure interaction effects are omitted in the model.

Model simplification diagram of the cylindrical shell with the internal machine and the two types metamaterial isolators.
Shell equations
Figure 2 shows a cylindrical shell with thickness h, length L, and radius R. In the motion analysis of the cylindrical shell, an orthogonal co-ordinate system (x, θ, z) is considered with a reference surface at the middle surface of the cylindrical shell. The x, θ, and z co-ordinates are respectively the axial, circumferential, and radial directions of the cylindrical shell. The axial, circumferential, and radial displacements are denoted as u, v, and w. The cylindrical shell considers isotropic with h/R ≤ 1. The motion equations of the cylindrical shell based on the Flügge shell theory 37 are expressed as

where F x , F θ , and F z are respectively the force on the shell at x, θ, and z directions. L ij (i, j = 1, 2, 3) are the differential operators that expressed as
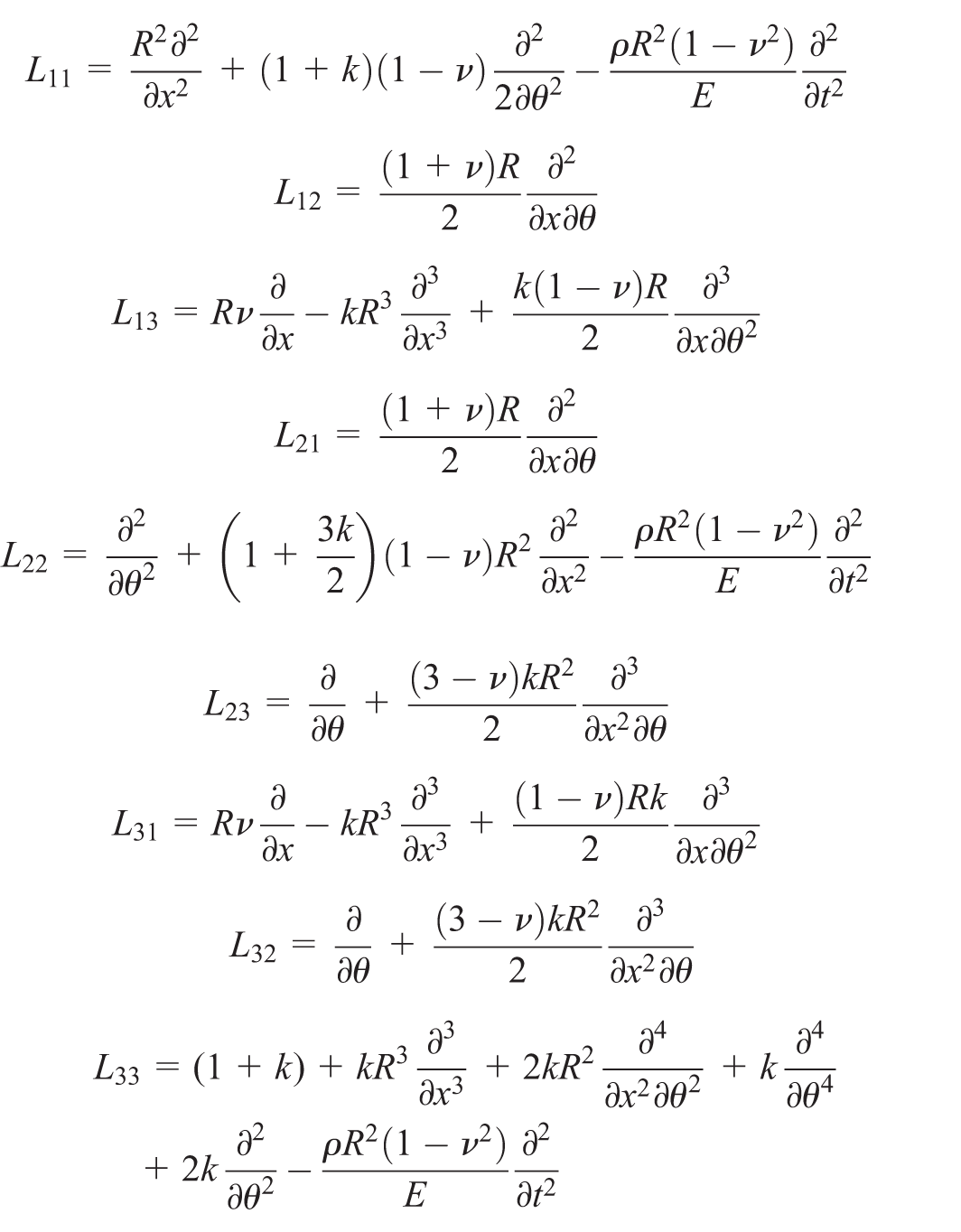
where k = h2/12/R2, ρ, E, ν are respectively are the density, Young’s modulus, and Poisson’s ratio of the cylindrical shell. g is the gravitational acceleration. According to the plane wave expansion method, the displacements of the cylindrical shell are in the form of



where U mn , V mn , and W mn is modal displacement of (m, n) order. m and n are the axial wave number and circumferential wave number. k m is the axial wave length. The boundary condition of the cylindrical shell is considered to be simply supported, with the axial wavelength set as k m = mπ/L. The excitation force transmitted from the internal machine and vibration system only considers F r , which is the internal spring force comes from the periodic isolation system

where k N is the stiffness of the N spring of the periodic isolator, x N is the displacement of the N mass of the periodic isolator.
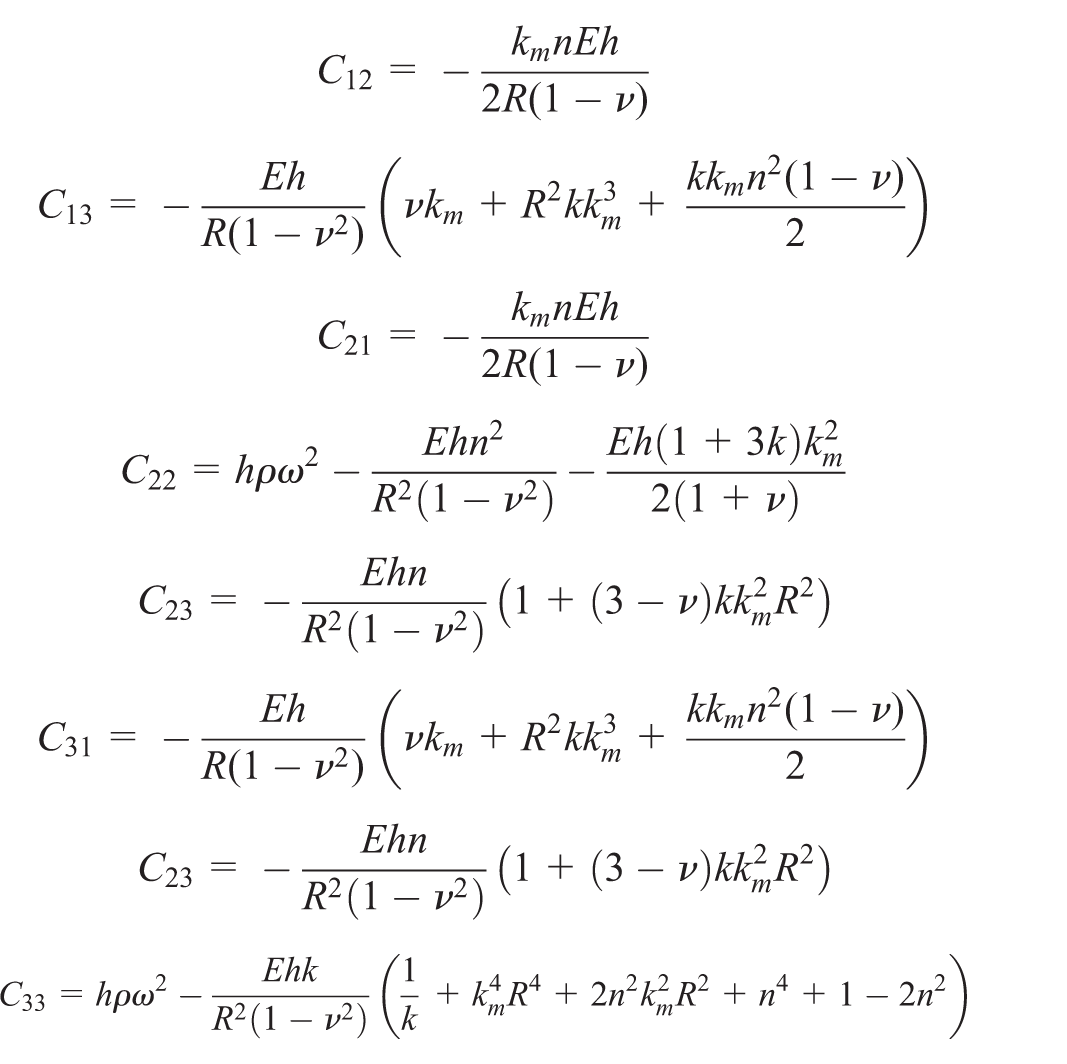
Submitting equations (2)–(4) into equation (1),

where


Model of a cylindrical shell.
Vibration of the periodic isolation system
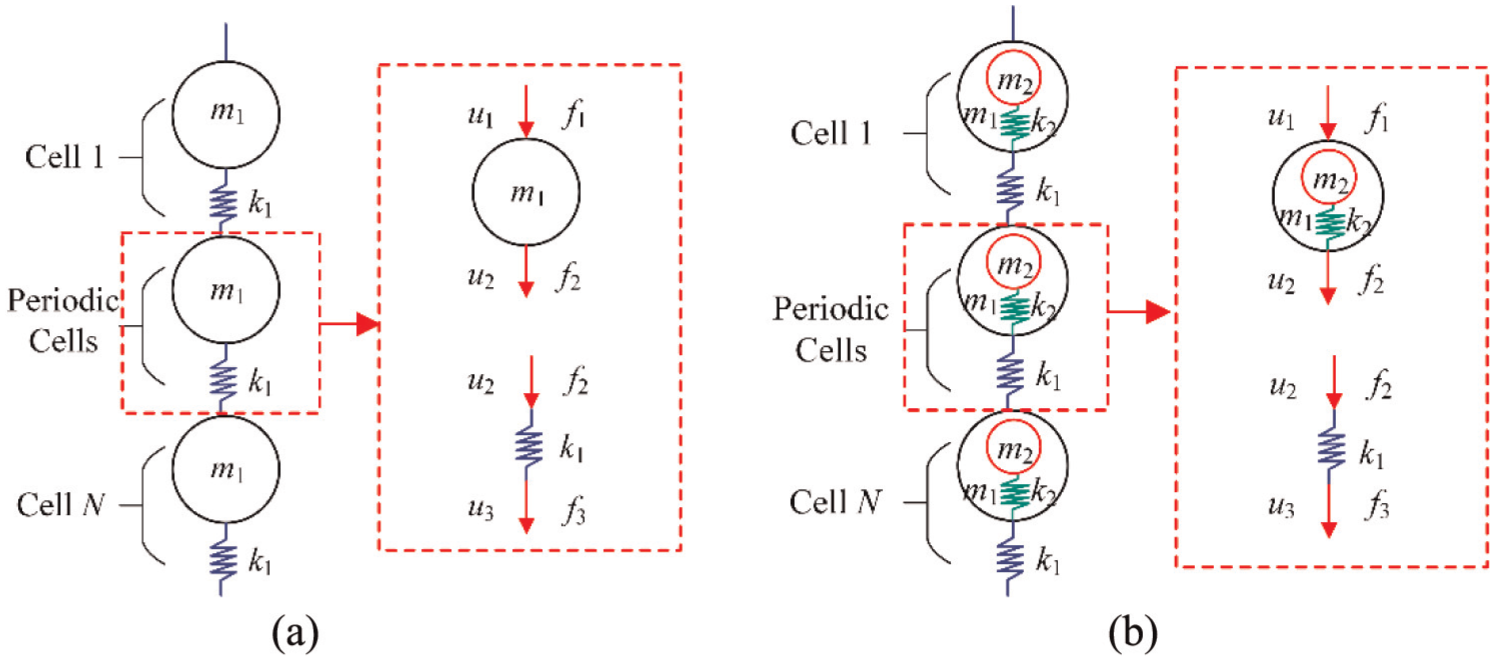
Figure 3(a) shows the motion of the subsystem that a machine connected with periodic isolator. Figure 3(b) shows the motion of the subsystem that a machine connected with periodic isolator with embedded absorber. The dynamic motion equation of the periodic isolation system is

where


where xi is the displacement response of the mass unit in internal machine and periodic vibration isolators; ω is the angular frequency; t is the time; F is the excitation force on the machine; F r is the internal coupling force on the connection point of the isolator and shell.

Simplified model of machine connected with (a) periodic isolator and (b) periodic isolator with embedded absorber.
Submitting equations (8) and (9) into equation (7), the impendence matrix of the periodic isolation system is derived as

For the periodic isolator, the mass matrix and stiffness matrix of equations (7) and (10) are


where m0 is the mass of the machine; m1 is the mass unit of the periodic isolator; k1 is the spring unit of the periodic isolator.
For the periodic isolator with embedded absorber, the mass matrix and stiffness matrix of equations (7) and (10) are


where


where m2 is the mass unit of the periodic isolator with embedded absorber; k2 is the spring unit of the periodic isolator with embedded absorber.
To include the effect of damping of isolators, the complex stiffness is considered in equations (12) and (16), with the expression of

where ξ represents the damping loss factor.
Vibration of the coupled system
The coupled system consists of two subsystems: the cylindrical shell and the periodic isolation system. These subsystems are connected via the same internal force and displacement at the connection point, indicating that they possess identical force and displacement data at that location. The connection point is situated at the base of the internal vibration isolation system. The coupled motion equation is

where


where F k is generated due to the internal elastic spring force at the connection point of the two subsystems, which is given as

The radial mean square velocity (MSV) level of the cylindrical shell is defined as

where the reference velocity is V r = 10−9 m/s.
Wave propagation characteristic
The relationship of the input variables and the output variables is described as the transmission matrix like

where
According to Figure 4, the periodic isolator consists the mass unit and the spring unit connected in series, and the periodic isolator with embedded absorber consists the mass unit with embedded absorber and the spring unit connected in series. The transmission matrix of the lumped mass unit, the spring unit, and the mass unit with embedded absorber are respectively given as38,39



The total transmission matrixes of the N layers periodic isolator


The wave propagation characteristic of the mechanical system could be represented by the eigenvalue analysis as

where λ is the eigenvalue of the transfer matrix

In equation (31), the eigenvalue λ of the mechanical system represents the state variables ratio of the output to the input. When λ = 1, it indicates the state variables propagate the mechanical system without wave attenuation. When λ ≠ 1, it indicates the state variables propagate the mechanical system with in forward directional or in backward directional wave attenuation. λ is also defined as

where μ is the wave propagation constant. α is the real part of wave propagation constant. β is the imaginary part of wave propagation constant. Hence, the cases α = 0 and α ≠ 0 respectively corresponds to λ = 1 and λ ≠ 1. In this study, the amount of the real part of wave propagation constant is calculated to represent the wave attenuation characteristic.
The dynamic motion for (a) periodic isolator and (b) periodic isolator with embedded absorber.
Numerical model verification
In this section, the accuracy of the analytical method (AM) for calculating the dynamic behavior of the cylindrical shell with internal machinery and various isolators is verified using the finite element method (FEM), which is implemented with COMSOL Multiphysics software. The structural and material parameters of the cylindrical shell (aluminum) are set as: L = 0.7 m, h = 0.01 m, R = 0.16 m, E = 6.9 × 1010 Pa, ν = 0.33, ρ = 2750 kg/m. The truncated mode in AM model is set as: m = 20, n = 20. The excitation force acts on the machine with 1 N at vertical direction. Moreover, Table 1 shows the dynamic parameters of the three isolators, which are respectively continuous isolator, periodic isolator, and periodic isolator with embedded mass. Among them, two non-dimensional mass that mass of periodic isolator m1/m0 and mass of embedded absorber m2/m0 are employed. For comparison, the continuous isolator and the two types metamaterial isolators use the same total spring stiffness for retaining the same isolation frequency. The spring stiffness the periodic isolators could be seen as the total stiffness of three springs connected in series. The cylindrical shell of FEM is modeled as the shell of the structural mechanics module, and the internal machine and isolator of FEM are modeled as the lumped mechanical system of structural mechanics module. A finite element quadrilateral mesh 36 × 40 with maximum mesh size of 0.02 m is employed to discretize the cylindrical shell in the longitudinal, and circumferential directions respectively. Frequency domain analysis of AM and FEM are conducted within the range of 1–3000 Hz, with a frequency interval of 1 Hz.
Dynamic parameters of the different vibration isolation systems.

Figure 5 compares the results of the radial MSV of the cylindrical shell carrying internal machine and varied isolators obtained from AM and FEM respectively. It could be seen from Figure 5 that reasonable radial MSV of the cylindrical shell carrying internal mechanics is calculated using AM, which is in good fit with FEM.

Comparison of the MSV of cylindrical shell with internal machine and (a) continuous isolator, (b) periodic isolator and (c) periodic isolator with embedded absorber by AM and FEM.
Table 2 compares the natural frequencies of the cylindrical shell connecting continuous isolation system, periodic isolation system, and periodic isolation with embedded absorber system obtained from AM and FEM respectively, and further provides the error of natural frequencies of those three cylindrical shell systems obtained from FEM and AM. As seen from Table 2, the natural frequencies of the cylindrical shell connecting three varied vibration isolation systems are similar, except that the cylindrical shell connecting periodic isolation system with embedded absorber has an additional 504 Hz anti-resonance frequency. It is obvious from Table 2 that the maximum error of the natural frequencies calculated by AM and FEM is 3.2%. The first-order natural frequency is the natural frequency of the isolation system. According to the isolation theorem, 40 the natural frequency f I of the isolation system is calculated by equation (33), which shown as

where kT is the total spring stiffness of the isolator, and m0 is the mass of the machine.
Comparison of the natural frequencies of cylindrical shell connecting different vibration isolation systems by AM and FEM.

Table 3 compares the displacement maps at natural frequencies, namely modal shapes, of cylindrical shell carrying internal machine and the periodic isolator with embedded mass, obtained using AM and FEM respectively. The displacement maps is the displacements of the discrete points on cylindrical shell, which is calculated according to equations (2)–(4). From Table 3, the displacement maps at natural frequencies obtained from AM are basically agreed well with those from FEM, except for some differences at six and seven orders. At the first order natural frequency which is vibration isolation frequency, the maximum vibration displacement of the cylindrical shell occurs at the connection between the cylindrical shell and the mechanics isolation system. The modal shapes of cylindrical shells are shown from the second- to the tenth-order natural frequencies. The vibration responses at the most of low order natural frequencies (2, 3, 4, 5, and 9) are contributed by the circumferential mode of the cylindrical shell. And the vibration responses at the higher order natural frequencies (6, 7, 8, and 10) are contributed by the combination of the circumferential mode and the blend mode of the cylindrical shell.
Comparison of displacement maps at natural frequencies of cylindrical shell carrying internal machine and the periodic isolator with embedded absorber by AM and FEM.

In conclusion, we could see from the Figure 5 and Table 2 that the modal frequencies calculated from the two methods are similar with the maximum error of 3.2%, while the large displacement error exist in Figure 5 and Table 3. It is because the displacement calculation consume more computational costs. When the frequency interval is not small enough in both the AM and FEM method, the truncated mode in AM model is not very high, and the grid setting in FEM model is also not very small, these factors lead to more error in the displacement results. However, the calculation of natural frequencies require small calculation expense. Therefore, the error of the natural frequencies results between the AM and FEM is small, while the error of the displacements between the AM and FEM is big.
Numerical results and discussions
After model validation, the present AM is utilized to investigate the vibration characteristics of the cylindrical shell connecting machine and two types of metamaterial isolators, as well as the vibration wave propagation characteristic of these metamaterial isolators. The results of the cylindrical shell with continuous isolator are considered for comparison. Additionally, the influence of the dynamic parameters of the periodic isolator with embedded absorber on both the vibration characteristics of the cylindrical shell and the vibration wave propagation characteristics are examined.
Vibration isolation performances comparison of the varied isolators
Figure 6(a) illustrates the radial MSV of the cylindrical shell connecting various isolators. From Figure 6(a), it is evident that the vibration of the cylindrical shell with the periodic isolator or periodic isolator with embedded absorber, significantly decreases above approximately 1500 Hz. This indicates a effective broadband vibration attenuation capability from middle to high frequencies. The vibration of the cylindrical shell with the periodic isolator embedded absorber has an obvious valley around 503 Hz in contrast to that of the cylindrical shell with periodic isolator. As a result, the two types of metamaterial isolators have a very wide bandgap, ranging from middle to high frequencies, compared to the continuous isolator. Moreover, the periodic isolator with embedded absorber further enhances low-frequency vibration isolation performance.

(a) Cylindrical shell vibration connecting the three different isolators and (b) wave propagation characteristic of the three different isolators.
Figure 6(b) shows the real part of the wave propagation constant of various isolators, which explains the bandgap characteristics. As shown in Figure 6(b), an additional narrow bandgap ranging from 494 to 578 Hz exists in the periodic isolator compared to the others. The two types of metamaterial isolators exhibit a wide bandgap from middle to high frequencies. In contrast, the continuous isolator lacks any bandgap. The additional narrow bandgap of 494–578 Hz has a central frequency of 503 Hz, which is equal to the natural mode of embedded absorber. Base on the modal analysis theory, the modal frequency of the embedded absorber is calculated as

According to the theory of the phononic crystals, the local resonant bandgap is generated due to the vibration capture by the resonant mode of the embedded absorber. Therefore, the central frequency of the local resonant bandgap is consistent with the natural frequency of the embedded absorber. Equation (34) explains that central frequency of the local resonant bandgap is in proportion to the stiffness of the embedded absorber, while in inverse proportion to the mass of the embedded absorber. The Bragg bandgap, on the other hand, is generated due to the radiate waves with a phase difference of matrix and scatterer cancel each other out. The starting frequency of the first Bragg bandgap could be calculated as 41

Based on equation (35) the starting frequency of the first Bragg bandgap is 1501 Hz, which is consistent with the result of the periodic isolator from Figure 6(b). Particularly, the starting frequency of the periodic isolator with embedded absorber at 1532 Hz increases a little compared to that of the periodic isolator. In addition, equation (35) explains that starting frequency of the first Bragg bandgap is in proportion to the stiffness of the periodic isolator, while in inverse proportion to the mass the periodic isolator.
Table 4 intuitively displays the displacement maps at five different frequencies covering low, middle, and high frequencies of cylindrical shell with different isolation system. The color bar of different maps at the same frequency keep consistent for comparison. From Table 4, the vibration responses of the cylindrical shell connecting the two types of metamaterial isolators are significantly decrease at 2000 and 3000 Hz as the starting frequency of the Bragg bandgap is 1501 and 1532 Hz respectively. The periodic isolator with embedded absorber can remarkably decrease the vibration responses of the cylindrical shell at 500 Hz which is in the range of local resonant bandgap. However, at frequencies of 200 and 1000 Hz which are out of range of the bandgaps, the vibration responses of the cylindrical shell connecting continuous isolator is similar to or lower than those connecting metamaterial isolators.
Displacement maps at five different frequencies (200, 500, 1000, 2000, and 3000 Hz) of cylindrical shell in different vibration isolation systems.

From the above discussion about the analysis results, the periodic isolator is proposed based on the Bragg scattering metamaterials with a wide Bragg bandgap, improving the vibration attenuation performance at middle and high frequencies. The embedded absorber is proposed based on the local resonant metamaterials with a narrow local resonant bandgap, further enhancing the vibration capture ability at low frequency. Hence, the integration of local resonance metamaterial and Bragg scattering metamaterial in metamaterial isolator could increase the width of bandgaps. The periodic isolator with embedded absorber adds a low-frequency bandgap compared with periodic isolator, which achieve better vibration attenuation of the cylindrical shell with internal machine.
Effects of the dynamic parameters of metamaterial isolator on vibration behavior
This subsection conducts a parametric analysis to elaborate the effects of the dynamic parameters of the periodic isolator with embedded absorber on the vibration characteristics of the cylindrical shell.
Figure 7 shows the effects of the various dynamic parameters including the mass of periodic isolator (m1/m0), the spring stiffness of periodic isolator (k1), the damping of periodic isolator (η1), and the number of periodic cells (N) of the periodic isolator on the radial MSV of the cylindrical shell. From Figure 7, the radial MSV of the cylindrical shell from middle to high frequencies gets lower as the increase of m1 or N, while it gets lager as the increase of k1. The η1 has nearly no effect on the vibration attenuation from middle to high frequencies, while it weakens the low frequency vibration peaks of the cylindrical shell.

The effects of the various dynamic parameters on the vibration characteristics of cylindrical shell: (a) m1, (b) k1, (c) η1, and (d) N.
Figure 8 shows the effects of the various dynamic parameters including the mass of embedded absorber (m2/m0), the spring stiffness of embedded absorber (k2), and the damping of embedded absorber (η2) of on the radial MSV of the cylindrical shell. From Figure 8, the low-frequency vibration valley caused by the local resonant bandgap moves to lower frequency range with the increase of m2, and moves to higher frequency range as the decrease of k2. The growth of η2 makes vibration valley values around 500 Hz smaller.

The effects of the various dynamic parameters on the vibration characteristics of cylindrical shell: (a) m2, (b) k2, and (c) η2.
From the above discussion about the analysis results, the dynamic parameters that primarily regulate the vibration characteristics of cylindrical shells carrying internal machine and periodic isolator with embedded absorber are: m1, k1, m2, k2, and N. Among them, the m1, k1, and N mainly regulate the middle and high frequencies vibration characteristics, while the m2 and k2 mainly regulate the low-frequency vibration characteristics.
Effects of dynamic parameters of metamaterial isolator on wave attenuation
As the real part of wave propagation constant represents the wave attenuation ability. A large value of the real part of wave propagation constant corresponds to greater wave attenuation. This subsection analyzes the influence of dynamic parameters of the periodic isolator with embedded absorber on the wave attenuation performance.
The wave propagation curves, which feature various dynamic parameters including the mass of periodic isolator (m1/m0), the spring stiffness of periodic isolator (k1), the damping of periodic isolator (η1), and number of periodic cells (N), are depicted in Figure 9. In Figure 9(a), the variety range of m1/m0 is from 0 to 0.5. When m1/m0 equals to 0, there is no Bragg bandgap. The starting frequency of the Bragg bandgap decreases accompanied by more wave attenuation amount as m1/m0 increases. Especially, when m1/m0 increases to above 0.3 approximately, the starting frequency of Bragg bandgap is near the end frequency of local resonant bandgap, generating a large coupled bandgap. In Figure 9(b), the variety range of k1 is from 0.1 to 10 kN/mm. With the increase of k1, the Bragg bandgap has a slow descent followed by rapid descent accompanied by smaller wave attenuation amount. At the same time, the central frequency of the resonant bandgap stays unchangeable, while the bandwidth of the resonant bandgap becomes narrower. It could also be observed that as k1 becomes small, the starting frequency of Bragg bandgap approaches to the end frequency of local resonant bandgap, generating a large coupled bandgap. In Figure 9(c), the variety range of the η1 is from 0 to 0.5. With the increase of the η1, there exists little wave attenuation below the original starting frequency of the Bragg bandgap due to the damping effect. In Figure 9(d), the wave attenuation amount of the local resonant bandgap and Bragg bandgap become greater when the N changes from 1 to 8, while then bandwidth basically unchanged.
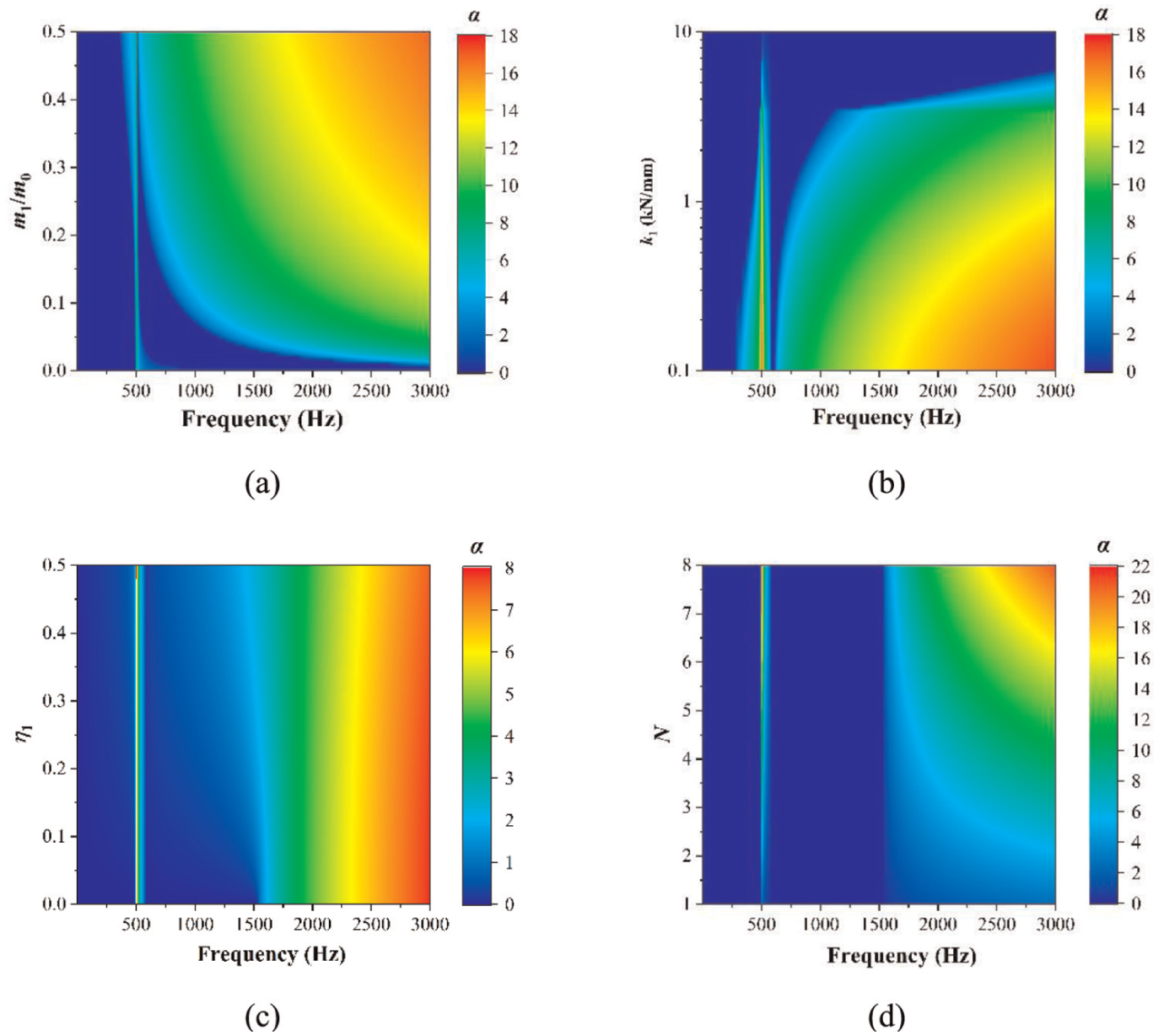
The effects of the various dynamic parameters on the wave propagation characteristics of the periodic isolator with embedded absorber: (a) m1, (b) k1, (c) η1, and (d) N.
The wave propagation curves with various dynamic parameters including the mass of embedded absorber (m2), the spring stiffness of embedded absorber (k2), and the damping of embedded absorber (η2) are shown in Figure 10. In Figure 10(a), the central frequency of the local resonant bandgap decreases greatly firstly, and then decreases slowly as the m2/m0 changes from 0 to 0.5. In addition, the resonant bandwidth becomes wider with the increase of m2/m0. While the m2/m0 has no impact on the Bragg bandgap. In Figure 10(b), the central frequency of the local resonant bandgap increases linearly from 300 to 920 Hz along with wider bandwidth and more wave attenuation when the k2 changes from 0.1 to 1 kN/mm. It is observed that large k2 could slightly increase the starting frequency of Bragg bandgap. In Figure 10(c), the variety range of the η2 is from 0 to 0.5. With the increase of the η2, the wave attenuation of the local resonant bandgap obviously diminishes, while no influence occurs in the Bragg bandgap.

The effects of the various dynamic parameters on the wave propagation characteristics of the periodic isolator with embedded absorber: (a) m2, (b) k2, and (c) η2.
From the above discussion about the analysis results, the Bragg bandgap of the periodic isolator with embedded absorber is greatly influenced by the dynamic parameters: m1, k1, and N, while it is slightly influenced by the dynamic parameters: η1 and k2. On the other hand, the local resonant bandgap of the periodic isolator with embedded absorber is strongly affected by the dynamic parameters: k1, m2, and k2, while it is less affected by the dynamic parameters: N and η2. As results, the large m1, large N, and small k1 are beneficial for generating a Bragg bandgap with low starting frequency, wide bandwidth, and large wave attenuation. The large m2, small k2, small η2, and large N would achieve a local resonant bandgap with low central frequency, large bandwidth, and considerable vibration attenuation.
Conclusions
In this paper, the AM for predicting the dynamic characteristics the cylindrical shell carrying internal machine and metamaterial isolator is proposed based on transfer matrix method and Flügge shell theory. For isolating the vibration in a wider frequency range, the metamaterial isolator that combines the Bragg bandgap and local resonant bandgap is employed, namely periodic isolator with embedded absorber. The vibration behavior of the cylindrical shell and the wave attenuation performance of the metamaterial isolator are analyzed using the present AM. The main conclusions may be drawn as follows.
(1) The AM of the cylindrical shell carrying internal mechanical metamaterial isolation system is proposed to calculate the vibration isolation effect of the metamaterial isolators on the cylindrical shell with internal machine, which accuracy is verified by FEM.
(2) Vibration behavior of cylindrical shell with various mechanical isolation systems and wave attenuation property of various metamaterial isolators both show that the periodic isolator with embedded absorber and periodic isolator have broad bandgap from middle to high frequencies due to the Bragg scattering mechanism, and the periodic isolator with embedded absorber has an additional low-frequency bandgap caused by local resonant mechanism. Hence, the periodic isolator with embedded absorber has better vibration attenuation performance on the cylindrical shell with internal machine.
(3) The bandgaps characteristics of the periodic isolator with embedded absorber could be flexibly regulated by the dynamic parameters. According to the results of parametric analysis, the large m1, large N, and small k1 have advantage in generating a Bragg bandgap with low starting frequency, wide bandwidth, and large wave attenuation. The large m2, small k2, small η2, and large N is profit for a local resonant bandgap with low central frequency, large bandwidth, and considerable vibration attenuation.
(4) A coupled bandgap with large bandwidth could be achieved when the starting frequency of the Bragg bandgap gets close to the central frequency of the local resonant bandgap in the periodic isolator with embedded absorber.
Additionally, the AM proposed in this paper is general which contains the main dynamic parameters of the cylindrical shell carrying internal machine and periodic isolator with embedded absorber. This AM can be applied in the design process of cylindrical shell carrying metamaterial isolation system, which requires less computational resources and time cost comparing to FEM.
Footnotes
Handling Editor: Chenhui Liang
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Supported by Natural Science Foundation of Shaanxi Province (2025JC-YBQN-717 and 2023-JC-YB-337) and National Natural Science Foundation of China (No. 52374039).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.