
Abstract
In this article, the conditions for the asymmetric nonlinear vibrations of an unforced Watt governor were investigated and the exact analytical solutions for its time period and displacement were derived naturally from the first integral of the governing dynamic model. It was demonstrated that the unforced Watt governor can undergo asymmetric vibrations due to bifurcation and the conditions for this to happen were derived based on the dimensionless rotational speed of its spindle and the initial conditions. In contrast to previously published exact solutions that are limited in their scope of application, the present exact solutions are applicable to all conditions of asymmetric vibrations. Simulation results revealed that the unforced Watt governor produces strong nonlinear asymmetric response even for small initial amplitudes and that the expression of the nonlinear effects depended strongly on the initial conditions. The present exact solutions provide benchmark solutions that are useful for calibrating the accuracy of other approximate analytical methods especially under highly stiff nonlinear conditions. The analytical framework develop in this study can be extended to other symmetric oscillators capable of bi-stable and tri-stable vibrations.
Introduction
The Watt governor is a mechanical device used to achieve automatic speed control of engines. Although it has undergone several modifications since its invention, it still remains relevant today because of its pedagogical value, 1 research relevance2,3 and historic contribution to the mathematical theory of automatic control 4 and stability analysis. 5 As illustrated in Figure 1, the Watt governor consists of two flyballs connected to a massless sleeve by means of arm linkages and two arms. The arms are pivoted so that the flyballs can move inward and outward as they rotate with the vertical spindle. The engine drives the spindle rotation through a bevel transmission gear. The sleeve, which is keyed to the spindle, revolves with the spindle and can slide up and down according to the spindle’s rotational speed. Two stoppers are provided to limit the vertical motion of the sleeve.

Watt governor showing components and linkages (adapted from YouTube video: https://www.youtube.com/watch?v=sJDVacqQHzE).
The principle of operation of the Watt governor (Figure 1) is quite simple. When the load on the engine decreases, there is an increase in the speed of the engine and the angular velocity of the spindle. This increases the centrifugal force on the flyballs so that the flyballs move outwards and the sleeve move upwards. The upward motion of the sleeve actuates a throttle link (a bell-crank mechanism) that operates the throttle valve to decrease the fuel supply. Consequently, the power output is reduced and the engine speed is lowered. On the other hand, when the load on the engine increases, the engine speed and the centrifugal force decrease. The flyballs move inward and the sleeve moves downward. The movement actuates the throttle link in a manner that causes an opening of the throttle valve for increased fuel supply. Hence, the power output improves and engine speed increases. This way, the governor attempts to maintain a steady engine speed irrespective of the load on the engine. However, the Watt governor is insensitive to speed fluctuations at high engine speeds (above 200 rpm) and therefore, it is suitable for moderate to low speed (30–200 rpm) applications such as steam engines, marine engines, textile machinery, windmills and modern striking clocks.
From the time James Clerk Maxwell investigated the dynamics of the Watt governor in his seminal paper, 6 several studies have been conducted on the stability2,3,5 and vibration analysis of the Watt governor.4,7,8 The unforced Watt governor (UWG) undergoes symmetric vibrations which are characterized by equal maximum displacement on each side of the centre of vibration. Due to this fact, the UWG model has been mostly investigated in the light of its symmetric vibrations.9–23 Liao and Chwang 9 obtained approximate periodic solutions for the symmetric vibration of the UWG model using the homotopy analysis method (HAM). They derived the second-order HAM solution in terms of Bessel function but the procedure is algebraically complicated for higher-order approximations. Lai et al. 10 investigated the large-amplitude symmetric vibration of the UWG model. They used the Chebyserv polynomial to approximate the UWG model to a cubic-quintic Duffing oscillator, for which they obtained an approximate analytical solution using a modified Micken’s iteration method. The results of the second-order modified Micken’s iteration method were found to be more accurate than the second-order HAM solution. Ghafoori et al. 11 applied the differential transform method (DTM) to study the symmetric vibration response of the UWG model. Comparison with homotopy perturbation method (HPM) and variational iteration method (VIM) showed that the DTM produced more accurate results. He et al. 12 obtained an approximate analytical periodic solution for the symmetric vibration response of the UWG model using the HPM whereas Sharif et al. 13 used the modified HPM. The HPM required approximation of the non-polynomial restoring force with a polynomial function but the modified HPM did not. Consequently the modified HPM solution showed good prediction of the large-amplitude symmetric vibration response while the HPM produced significant errors. Ismail et al. 14 derived an approximate periodic solution for the symmetric vibration of the UWG model using the gamma function method (GFM). The results showed that the GFM produced accurate estimates for small- to moderate-amplitude vibrations. Moatimid and Amer 15 derived an approximate analytical solution for the symmetric vibrations of the UWG model. They approximated the UWG model with a cubic-quintic Duffing oscillator using Taylor’s series expansion of the original nonlinear restoring force. The cubic-quintic Duffing oscillator was solved for specific initial conditions using the second-order Laplace Transform Homotopy Perturbation method (LTHPM). However, recent studies 16 have shown that the second-order LTHPM produces significant errors in the periodic response for moderate-amplitude vibration of the UWG model. Moatimid et al. 17 studied the stability and symmetric vibration of the UWG model using an equivalent linearization non-perturbative approach. However, the stability analysis based on the linearization approach could not predict the bifurcation of the UWG model. In Big-Alabo and Chuku 16 and Big-Alabo and Ossia, 18 the stability, bifurcation and periodic solution of the symmetric vibration of the UWG model was examined for large-amplitude cases using the continuous piecewise linearization method (CPLM) while in References 19–21 the Akbari-Ganji method (AGM) was used to derived periodic solutions for small- to moderate-amplitude cases. Most approximate analytical methods used to derive the periodic solution of the UWG model require the restoring force to be in polynomial form.10,12,14,15,19–21 Hence, the non-polynomial restoring force of the UWG model is normally approximated by a cubic-quintic polynomial function and this approach produces significant errors for large-amplitude vibrations. 13 However, the CPLM works with a non-polynomial restoring force and seems to provide a more accurate periodic solution compared to the other approximate methods in References 10, 12, 14, 15, 19–21, especially for large-amplitude vibrations.
Several studies have applied approximate analytical methods to estimate the symmetric vibration response of the UWG model and a few have also derived exact closed-form solutions. Hammad et al. 22 derived an exact periodic solution for the symmetric vibration of the UWG model with non-zero initial amplitude and zero initial velocity. The solution was derived by applying an assumed ansatz solution in terms of the Weierstrass elliptic function. More general initial conditions for the symmetric vibration of the UWG model were studied by Salas et al., 23 who transformed the vibration model from angular coordinates to Cartesian coordinates and obtained a non-natural oscillator model for the governor. The latter model was then solved exactly using an assumed ansatz solution in terms of the Jacobi cosine function from which the exact analytical solution of the symmetric vibration of the UWG model was derived. The challenge with the ansatz method is that the assumed solution may be limited in its scope of application because it was not derived naturally from the equation of motion.24,25
On the other hand, the Watt governor can undergo asymmetric vibrations but not much attention has been given to this. The asymmetric vibrations are characterized by unequal maximum displacement on each side of the centre of vibration. Abdel-Rahman 26 studied the symmetry breaking phenomenon of the UWG model based on classical, semiclassical and quantum considerations. In the classical sense, rotational velocities that represent conditions where the total energy is slightly or well beyond the symmetry breaking point were considered. These conditions imply the existence of asymmetric vibrations for which the total energy is negative. A closed-form periodic solution for the asymmetric vibration was derived from the first integral in terms of the Jacobi delta amplitude function. However, the constants in the periodic solution were not completely defined and the time period solution was not derived. Furthermore, the condition for asymmetric vibration was defined in terms of the total energy and it is unclear whether the derived periodic solution is applicable to all conditions of asymmetric vibration. Markeev7,8 studied the asymmetric vibrations of the UWG model by considering the phase portrait of the approximate set characterized by positive amplitudes. The primary and secondary conditions for asymmetric vibration were derived based on the dimensionless rotational speed and the total energy of the governor respectively. The exact periodic solution was derived naturally from the first integral of the vibration model. However, there are limitations in these studies that were addressed in the present study. First, the use of the total energy to determine the secondary conditions for asymmetric vibration is not the best approach since the energy relies on the initial conditions. A better approach involves deriving the secondary conditions in terms of the initial conditions which are input parameters. Secondly, the first argument of the Jacobi delta amplitude function in the exact displacement solution 7 was defined only for a limited condition that does not represent all asymmetric vibrations. In the present study, the exact periodic solution derived naturally from the first integral applies to all conditions of asymmetric vibration. Furthermore, exact periodic solutions were derived for all conditions representing single-well and double-well symmetric vibrations. The goal of this paper is to establish analytically the conditions under which the UWG experiences asymmetric vibrations and to derive exact closed-form solutions for its vibration response under general initial conditions.
Conditions for asymmetric vibrations
Under real conditions, the rotational speed of the spindle undergoes small fluctuations while in operation, especially at moderate to high speeds. Also, viscous damping effects play a role in the vibration response for low rotational speeds. Therefore, if the fluctuations and damping effects are accounted for, then the resulting equations of motion will be a coupled two degree-of-freedom system as shown 27 :


where

The nonlinear restoring force of the vibration of the governor is
By introducing time normalization, equation (2) can be rewritten as:

where

Bifurcation plot showing the conditions for transition from single-well to double-well.
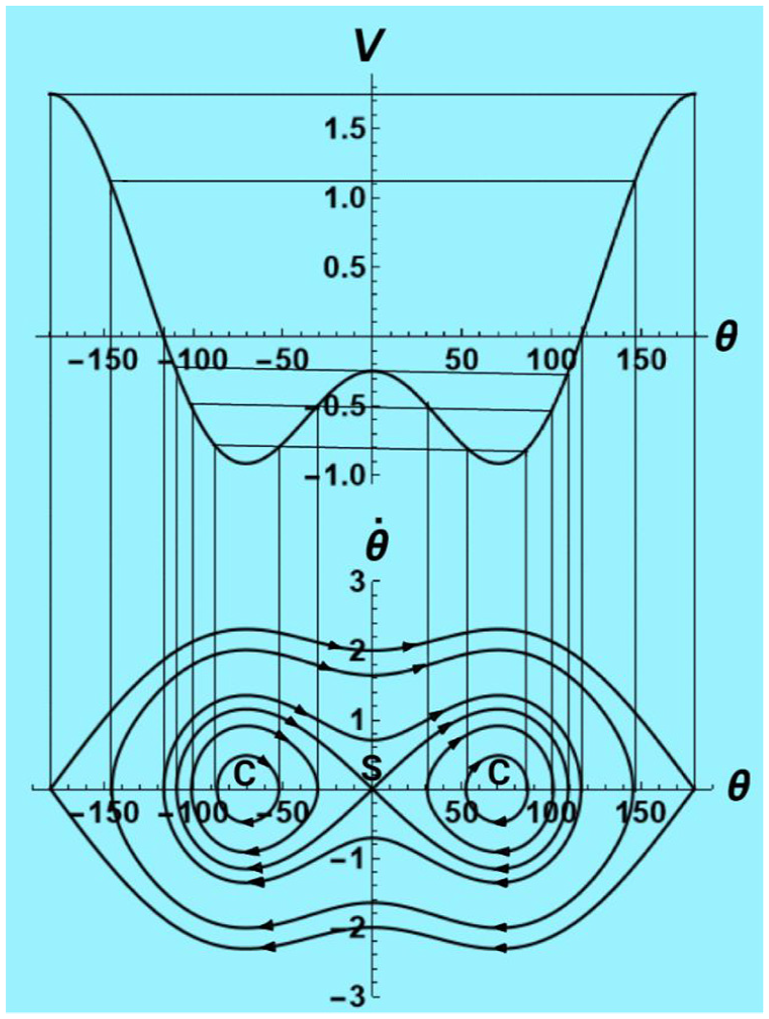
Potential function plot and phase diagram for
A notable observation from Figure 3 is the existence of a unique energy level for
The primary condition for the asymmetric vibrations of the governor is that
The first integral of equation (3) gives the state-space relationship as:

where

At the displacement limits of the separatrix curve where the latter intersects the horizontal axis, the kinetic energy vanishes. Thus,

However, if

Note that equation (7) reduces to equation (6) when
It seems from equation (7) that there are three cases of initial conditions to consider in respect of the asymmetric vibrations that is, (i) zero initial velocity and non-zero initial displacement, (ii) non-zero initial velocity and zero initial displacement and (iii) non-zero initial velocity and displacement. However, a simple examination of the three cases shows that only cases (i) and (iii) satisfy the conditions in equation (7). For case (ii), equation (7) implies that:
Figure 4 shows a mapping of the parametric conditions for asymmetric vibrations to occur. The map shows that a wider range of initial conditions capable of producing asymmetric vibrations is obtained for higher values of the normalized rotational speed.

Region satisfying parametric conditions for asymmetric vibrations: (a) 3-D plot for complete region and (b) 2-D projection defining the region of initial conditions for given values of
Exact periodic solution
In this section, the exact periodic solution for equation (3) was derived naturally from the governing differential equation. Furthermore, arbitrary non-zero initial conditions were considered to ensure unrestricted application of the solutions.
From equation (4),

where
To derive the exact periodic solution, we need to transform the equation (8) from polar to Cartesian coordinates. Using the transformation variable

where
Exact time period for asymmetric vibration of the Watt governor
Assuming the amplitudes of the asymmetric vibrations are

To evaluate the integral in equation (10), we apply formula 254.00 of Section 3.147 on page 278 of Gradshteyn and Ryzhik 30 given as:

where

In order to compare with equation (11), the exact time period can be rearranged as:

Then comparing equations (11) and (13),

where

and

Note that for
Exact displacement history for asymmetric vibration of the Watt governor
To derive the exact displacement solution, we first define the applicable integration limits of equation (9). Given the arbitrary initial conditions, the upper and lower limits of integration are

Assuming

At this point we apply equations (11) and (12). Therefore,

where

Equation (18) can be expressed as:

where
The Jacobi sine function is defined as:

from which

The plus or minus sign in the first argument of the Jacobi sine function is negative if

where

Results and discussions
Asymmetric vibration response
The exact periodic solutions derived in equations (14), (15) and (25) are applicable to the asymmetric vibrations of the Watt governor. The corresponding exact periodic solutions for the symmetric vibrations of the Watt governor were derived as shown in the Appendix. As discussed in Section “Conditions for asymmetric vibrations,” only cases (i) and (iii) initial conditions can be examined for the asymmetric vibrations. Figure 5(a) and (b) is for

Asymmetric displacement history and corresponding relative difference of exact and numerical solutions: (a, b)
The results show that strong asymmetric vibrations are possible even when the initial amplitude is small (Figure 5(a)). This occurs because the oscillator experiences stronger nonlinear effects resulting in greater asymmetry as the initial amplitude approaches the limits of the applicable amplitude range. Additionally, the relative difference between the exact solution and numerical differentiation (
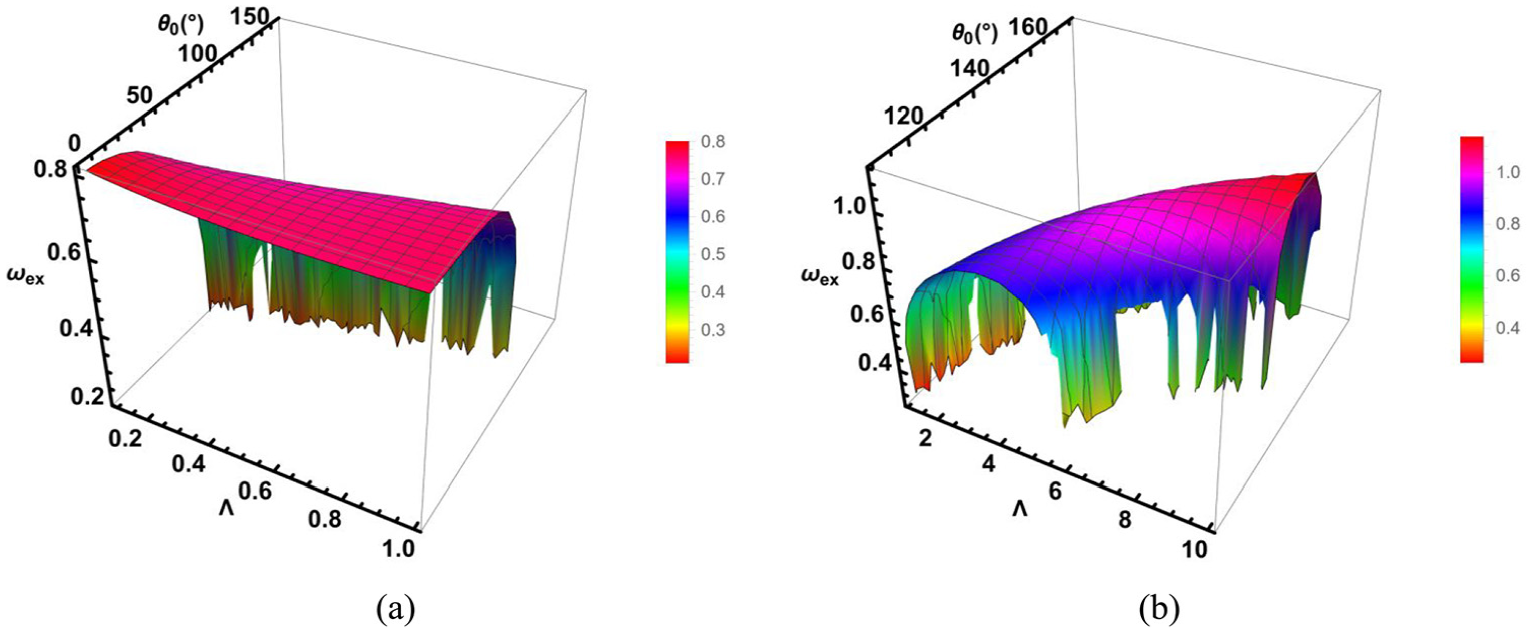
The variation of the frequency with initial displacement (

Frequency response for varying initial displacement and system parameter: (a)
Symmetric vibration response
The exact periodic solution for the symmetric vibration of the UWG model was derived in the Appendix. Although the present focus is on the asymmetric vibration, the solution of the symmetric vibration was simulated for one vibration cycle and compared with corresponding standard numerical solutions to confirm its validity. Three types of initial conditions were considered as follows: (I)

Symmetric single-well vibration and corresponding relative difference of exact and numerical solutions: (a, b)

Symmetric double-well vibration and corresponding relative difference of exact and numerical solutions: (a, b)
The frequency response of the UWG model was simulated for zero initial velocity (Figure 9) and non-zero initial velocity (Figure 10). For both cases of initial conditions, the frequency response for single-well (Figures 9(a) and 10(a)) and double-well (Figures 9(b) and 10(b)) vibrations were investigated. The results show that the ranges of initial amplitude (

Frequency response of the symmetric vibration under varying initial displacement and system parameter when
Frequency response of the symmetric vibration under varying initial displacement and system parameter
Conclusions
The present article has demonstrated that the UWG model, which has been mostly investigated for its symmetric vibrations, can undergo asymmetric vibrations under typical operating conditions. The conditions for the existence of the asymmetric vibrations were established and found to depend on the system’s parameter (
It was shown that exact closed-form solutions for the time period and displacement of the symmetric and asymmetric vibrations can be derived naturally from the first integral of the governing differential equation. The exact period was derived in terms of the complete elliptic integral of the first kind while the exact displacement was derived in terms of the Jacobi sine function. Comparison of the exact solutions with corresponding numerical solution for a wide range of typical operating conditions confirmed the validity of the exact solutions. A major highlight of the present exact solutions is that they are applicable to all conditions of asymmetric vibrations unlike the solutions derived in published studies.7,26 Simulation of the vibration response revealed that the governor produces strong nonlinear asymmetric response even for small initial amplitudes and that the expression of the nonlinear effects depends strongly on the initial conditions. Also, the bi-stable vibration response produced strong anharmonic periodic histories that show evidence of highly nonlinear effects. Therefore, the present exact solutions can be used to verify the accuracy of approximate analytical solutions for strong nonlinear oscillators instead of the traditional numerical solutions that are known to produce significant errors under stiff nonlinear conditions. 25 This study can be extended to other symmetric oscillators capable of undergoing bi-stable and tri-stable vibrations.
Footnotes
Appendix
Handling Editor: Mahdi Mofidian
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
All necessary data have been included in the manuscript.