
Abstract
This work examines the forced vibrations of a non-uniform Euler-Bernoulli beam carrying point masses and subjected to a concentrated transverse harmonic force. By the means of Newton’s second law of motion, the integro-partial differential equation of motion is derived. The Galerkin approach is applied, and the normalized mode shapes of the non-uniform base beam are used to derive the nonlinear governing equation of motion that contains cubic and quintic nonlinearities. The method of harmonic balance method (HB) in conjunction with the pseudo arc-length continuation scheme are employed to obtain the amplitude-frequency curves. Non-uniform beams with two different boundary conditions are considered in this study; cantilever and simply supported beams. To examine the accuracy and validity of the proposed method and solution, some results obtained by the suggested approach have been compared with those found through numerical integration, where a good agreement was achieved. The influences of several factors such as the non-uniformity parameter, the magnitude of the point masses, and the boundary conditions on the steady state amplitude have been examined. It is observed that these parameters have significant effects on the dynamic behavior of the non-uniform beams. For generality and convenience, the results are displayed in dimensionless forms.
Keywords
Introduction
Understanding the behavior of non-uniform structures is vital in studying the dynamic performance of several engineering applications such as helicopter rotor blades, wind turbine blades, offshore vertical risers, and others. 1 Many researchers investigated the free vibrations of nonuniform beams. For example, Abrate 2 used the Rayleigh-Ritz method to find the natural frequencies for beams with general shapes, where the variations of the cross-sectional area and the moment of inertia are represented by a polynomial of a certain degree. Wu and Chen 3 obtained closed form solutions for the natural frequencies and the mode shapes of beams with linearly tapered thickness. The modified Bessel functions of the first and second kinds were utilized, and the expansion theorem was incorporated to obtain the frequencies of the beam with point masses and different boundary conditions. Mahmoud 4 applied the Myklestad method to obtain the natural frequencies and the mode shapes of non-uniform and axially functionally graded cantilever Euler-Bernoulli beams carrying a tip mass. Lee and Lee 5 applied the transfer-matrix and the Frobenius methods to carry out the free vibration analysis of tapered Euler-Bernoulli beams. It was found that the natural frequencies and the mode shapes are affected by the taper ratio.
It is known that motors and engines are mounted on shafts and beams. Hence, their weights, sizes, and locations will have significant impact on these structures. As a result, it is important to analyze the dynamic behavior of structural elements that carry different masses at several locations. 6 In this regard, Hamdan and Jubran 7 analyzed the free and forced vibrations of a uniform Euler-Bernoulli beam with elastically restrained ends and carrying a mass with a rotary inertia. The beam was subjected to a concentrated harmonic force at the mass location. The eigen value problem was formulated, and the exact mode shapes were obtained. The Galerkin approach was utilized to derive the ordinary differential equation. A parametric study was conducted to investigate the impacts of the location of the mass and the rotary inertia, and the stiffnesses of the springs at both ends of the beam, on the resonance response of the beam. Saito et al. 8 carried out the nonlinear vibrations of a simply supported beam with a point mass and subjected to a concentrated harmonic force at an arbitrary location. The influence of gravity was considered, and the Galerkin approach was applied to derive the equation of motion. The harmonic balance method was utilized to find the dynamic behavior of the beam. The influence of the magnitude and the location of the mass on the natural frequency were discussed.
Özkaya et al. 9 considered the free and forced nonlinear vibrations of an Euler-Bernoulli beam carrying a point mass. The mode shapes and the transcendental equations for different set of boundary conditions were found. The method of multiple time scales was adopted to determine the steady state vibration amplitude as a function of the detuning parameter and the natural frequency. The effects of the different boundary conditions, the position and magnitude of the mass on the natural frequencies and the forced response were discussed. Fang et al. 10 used analytical solutions to deal with the free and forced oscillations of a double beam system having a tip mass with rotary inertia at the primary beam. The influences of several parameters such as the stiffness of the layer that connects the beams, the mass ratio, and the rigidity ratio of the beams on the system’s oscillation behavior were analyzed.
Alimoradzadeh et al. 11 addressed the free and forced vibrations of Euler-Bernoulli beams lying on nonlinear viscoelastic layers. The beams are subjected to a moving mass and a thermal load. The governing equation of motion was established by the means of Hamilton’s principle, finite strain theory, and Galerkin approach. The method of multiple scales was introduced to obtain approximate solutions for the superharmonic and subharmonic responses of the beams. A parametric study was conducted to examine the impacts of the temperature rise, the coefficients of the viscoelastic layer, and the magnitude and velocity of the moving load on the dynamic behavior of the system. Karimi and Ziaei-Rad 12 analyzed the impact of a moving mass on the nonlinear coupled vibrations of a beam with moving support. It was assumed that the mass may be moving with a constant or a variable speed. Newton’s second law of motion was employed to derive the coupled partial differential equations of motion, and the Galerkin method was utilized to obtain the governing coupled ordinary differential equations that were solved numerically. The effects of the motion of the support and the velocity of the mass on the response of the beam were reported.
Tian et al. 13 considered the nonlinear vibrations of a beam bridge under a moving point mass. A smooth and discontinuous absorber was placed at the center of the beam to reduce the vibrations of the system. The governing equation was introduced, and the Galerkin method was utilized to obtain the ordinary differential equation of motion. The harmonic balance method, the Fourier expansion, the complete elliptic integrals, and the power flow approach were employed to obtain approximate solutions for the amplitude of beam’s vibrations. The influences of the speed of the moving mass, the mass ratio between the mass and the beam, and the smoothness parameter of the absorber on the beam’s amplitude were illustrated.
Based on the above literature review, it is observed that carrying out the nonlinear forced response of non-uniform beams attached to concentrated masses is not yet fully addressed. Thus, the purpose of this research is to fill this gap in literature. The main objective of this article is to investigate the dynamic behavior of non-uniform beams carrying concentrated masses and subjected to transverse harmonic forces. To analyze the proposed nonlinear system, we will use the harmonic balance method (HB), the Galerkin approach, and the arc-length continuation method to obtain the amplitude-frequency responses in the primary resonance state. The mathematical model of the non-uniform beam is formulated by utilizing Newton’s second law of motion and the Euler-Bernoulli beam theory. The effects of the magnitudes of the point masses, the boundary conditions, and the non-uniformity parameter on the dynamic characteristics of the non-uniform beam are presented in frequency response curves, phase portrait, and time response diagrams. The reliability of the HB method was illustrated by comparing the results with those obtained through direct numerical integration and good agreement is achieved. From the physical viewpoint, the non-uniform beam with the attached concentrated masses can be used as a model of structural elements used in aerospace and mechanical engineering applications carrying motors or engines. Moreover, the suggested model and solution procedure are appropriate for the establishment of the amplitude-frequency diagrams of strongly nonlinear systems.
Mathematical modeling
As previously mentioned in the introduction, the nonuniform beams can be used to represent tapered wings, fuselages, and helicopter rotor blades.14,15 Furthermore, a point mass can be used to model a wide range of examples in engineering where concentrated loads or localized masses significantly influence the structure’s behavior.16,17 For example, a point mass can be used to represent a motor or a gripper at the end of a robotic arm. Additionally, in aircraft wings, the engine can be represented as a point mass. In crane beams supporting a trolley and payload, the moving trolley and payload may be represented as point masses. In spacecraft booms supporting solar panels with attached instruments or equipment, the instruments can be modeled as point masses.
Following Rincón-Casado et al., 18 the governing partial differential equation of motion for free transverse vibrations of an Euler-Bernoulli beam is expressed as

where E is the modulus of elasticity, I is the second moment of area, w is the transverse displacement, A is the cross-sectional area of the beam,
where n is the number of the attached point masses,

For more details regarding the derivation of the integro-differential equation (equation (2)), interested readers are encouraged to refer to Rincón-Casado et al. 18 where a step-by-step formulation was shown for the case of a uniform beam without point masses. For brevity, the formulation of equation (2) was omitted in the current study.
Figure 1 shows a non-uniform cantilever beam with attached point masses and acted upon by a tip harmonic force. In this study, it is assumed that the thickness of the beam is kept constant, and the width of the beam varies exponentially along the length. Thus, the cross-sectional area and the moment of inertia of the beam are given as 19


where

where M is the total mass of the beam given as


Schematic diagram of a non-uniform cantilever beam carrying n point masses and subjected to a reciprocating tip force.
These dimensionless parameters are substituted into equation (2) to convert the governing equation of motion into a non-dimensional form. It should be stated that the asterisk notations are removed for simplicity. The governing equation of motion is obtained as
Solution procedure
The nonlinear partial differential equation (equation (8)) can be discretized in space and time utilizing the Galerkin’s approach as 20

where N denotes the number of retained modes,

where the first bending mode shape of the base beam (without the point masses) is given as 19

The relations that govern

Equations (9) and (10) are substituted into equation (8), then the result is multiplied by

where







The cantilever, simply supported, and clamped-clamped beams are considered in the present study. The boundary conditions for these beams are given in terms of the mode shapes as 19
Cantilever beam:

Simply supported beam:

Clamped-clamped beam:

The normalized mode shapes for non-uniform cantilever, simply supported, and clamped-clamped beams are expressed as
Cantilever beam:
a. For the non-uniformity parameter

b. For the non-uniformity parameter

Simply Supported beam:
a. For the non-uniformity parameter

b. For the non-uniformity parameter

Clamped-clamped beam:
a. For the non-uniformity parameter

b. For the non-uniformity parameter

The normalized mode shapes for the different nonuniform Euler-Bernoulli beams are displayed in Figure 2.

The first mode shape for nonuniform: (a) cantilever, (b) simply supported, and (c) clamped Euler-Bernoulli beams.
Harmonic balance
The periodic solutions of the equation of motion can be obtained using the harmonic balance method. The periodic solution is assumed as

where

where

Arc length continuation method
The Pseudo arc-length continuation method is utilized in this research to track all possible stable and unstable solutions of

Using a quadratic form of the pseudo arc length, equation (33) is rewritten as

where
The slope of the equilibrium path (

The initial prediction of the next point is determined as

To obtain the periodic solution, the prediction obtained in equation (36) is corrected iteratively using the Newton-Raphson method until the exact solution on the equilibrium path is found. As the governing equation of motion (equation (13)) includes odd nonlinearities only, the solution given in equation (31) can be expressed as
Results
In the current section, frequency response curves of non-uniform cantilever and simply supported beams with attached masses and subjected to concentrated harmonic forces are presented. Regarding the damping properties, it is known that aerospace systems often have very low damping ratios (ζ < 0.01) to ensure minimal energy loss and high precision. In machinery, the industrial equipment may have moderate damping (ζ ≈ 0.05–0.2) to reduce noise and vibrations. In the current study, the dimensionless damping coefficient c = 0.1. It is necessary to conduct a convergence test to determine the sufficient number of harmonics used in the analysis. Therefore, the steady state amplitudes are determined and plotted versus the excitation frequency for different numbers of harmonics for a non-uniform cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 for
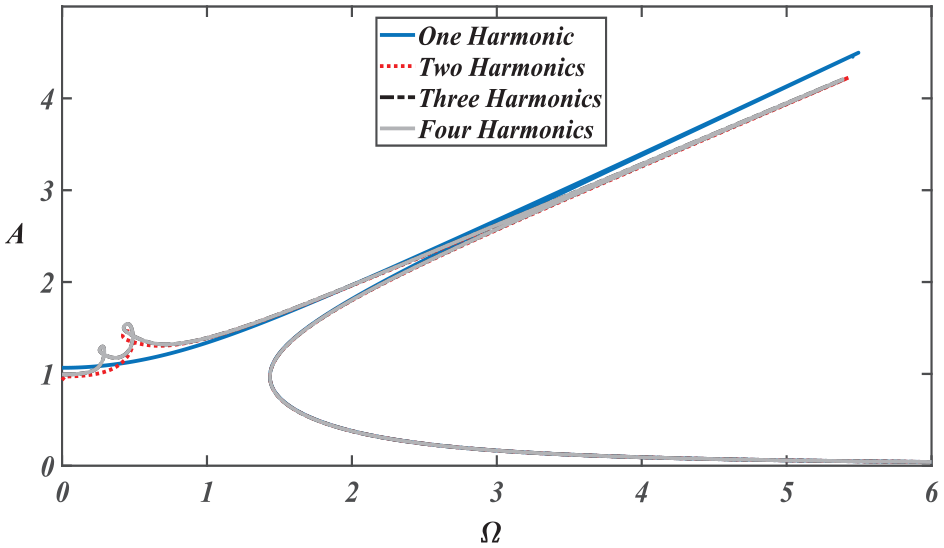
The frequency response of q obtained using the harmonic balance method (HB), for different numbers of harmonics, of a non-uniform cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 for

The frequency response of q obtained using the harmonic balance method (HB) compared with that obtained using direct numerical integration (NI) of a non-uniform cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 for
In Figure 5, the frequency amplitude curves are obtained for a non-uniform cantilever beam carrying three equal masses at x = 0.3, 0.6, and 0.9 for

The influence of the magnitudes of the point masses on the frequency-response curves of a non-uniform cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 for
In contrary, on the lower stable branches, the steady state peak amplitude declines as the magnitudes of the attached points rise. Thus, the influence of the mass magnitudes on the steady state amplitudes is different as the forward and backward sweeping are conducted. Besides, at lower excitation frequencies, it is noted that loops are created where multiple periodic solutions are found. Moreover, the hardening nonlinearity performance becomes stronger as the magnitudes of the point masses increase. Similar observations are made for Figure 6. The hardening nonlinearity refers to a type of nonlinear behavior in a system where the stiffness of the system increases as the displacement rises, causing an upward bend in the response curve at higher frequencies. This means the restoring force grows more rapidly than linearly with displacement, leading to an increase in the natural frequency of the system at larger amplitudes.

The influence of the magnitudes of the point masses on the frequency-response curves of a non-uniform cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 for
Based on Figure 4, for
Figure 7 displays the steady state amplitude of the three harmonics considered in this work. These amplitudes are generated for a non-uniform cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 with


The amplitude-frequency response curves
It is clear that
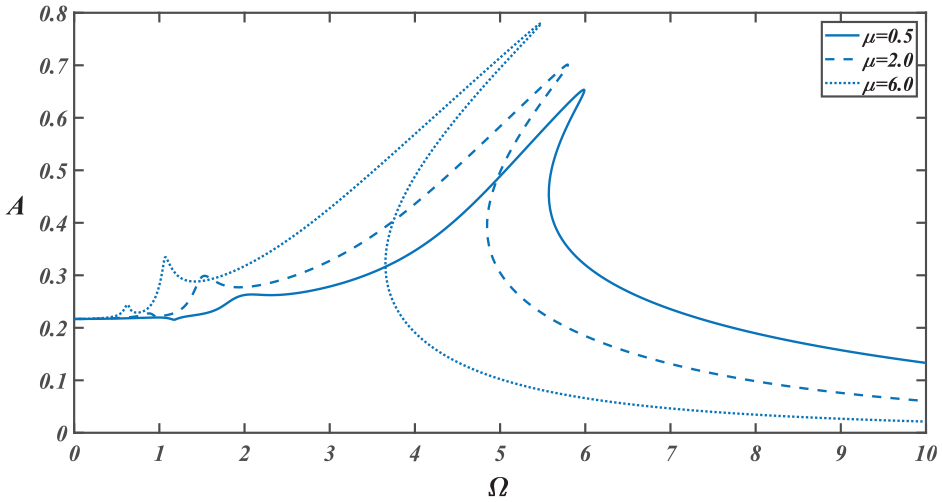
Figure 8 illustrates the impact of the non-uniformity parameter

The Influence of the non-uniformity parameter on the frequency-response curves of a cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 for
The impact of the magnitudes of the attached masses on the amplitude of a non-uniform simply supported beam carrying two masses at x = 0.25 and 0.75, for

The effect of the point masses magnitudes on the frequency-response curves of a non-uniform simply supported beam carrying two masses at x = 0.25, and 0.75, for
The impact of the magnitudes of the point masses on the frequency-response curves of a non-uniform simply supported beam carrying two masses at x = 0.25, and 0.75, for
The influence of the force amplitude on the frequency-response diagrams of a non-uniform simply supported beam carrying two masses at x = 0.25 and 0.75, for

The impact of the force amplitude on the frequency-response curves of a simply supported non-uniform beam carrying two masses at x = 0.25, and 0.75, for
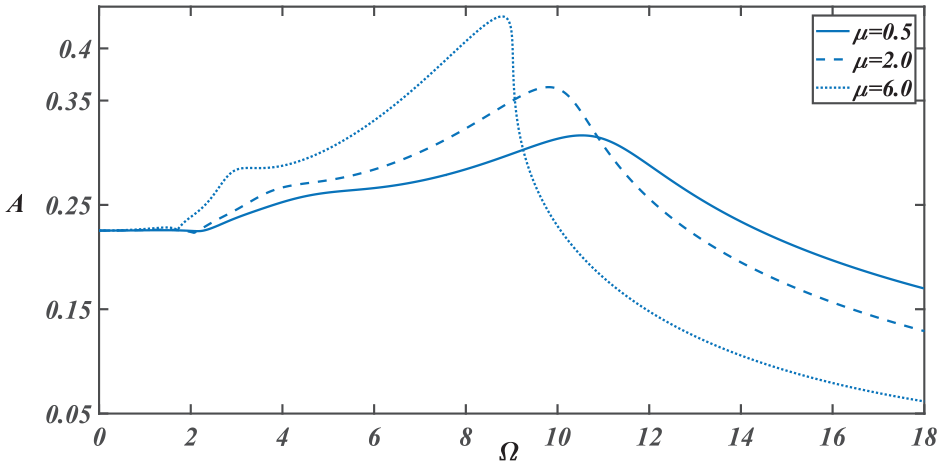
Figure 12 shows the impact of the non-uniformity parameter

The influence of the non-uniformity parameter on the frequency-response curves of a simply supported beam carrying two masses at x = 0.25, and 0.75 for
The influences of the magnitudes of the attached masses on the amplitude of a non-uniform clamped-clamped beam carrying two masses at x = 0.25 and 0.75,
The influence of the magnitudes of the point masses on the frequency-response curves of a non-uniform clamped-clamped beam carrying two masses at x = 0.25 and 0.75 for

The influence of the magnitudes of the point masses on the frequency-response curves of a non-uniform clamped-clamped beam carrying two masses at x = 0.25 and 0.75 for
Figure 15 represents the time response and phase portrait for a non-uniform cantilever beam carrying three masses at x = 0.3, 0.6, and 0.9 with

(a) The steady state forced response
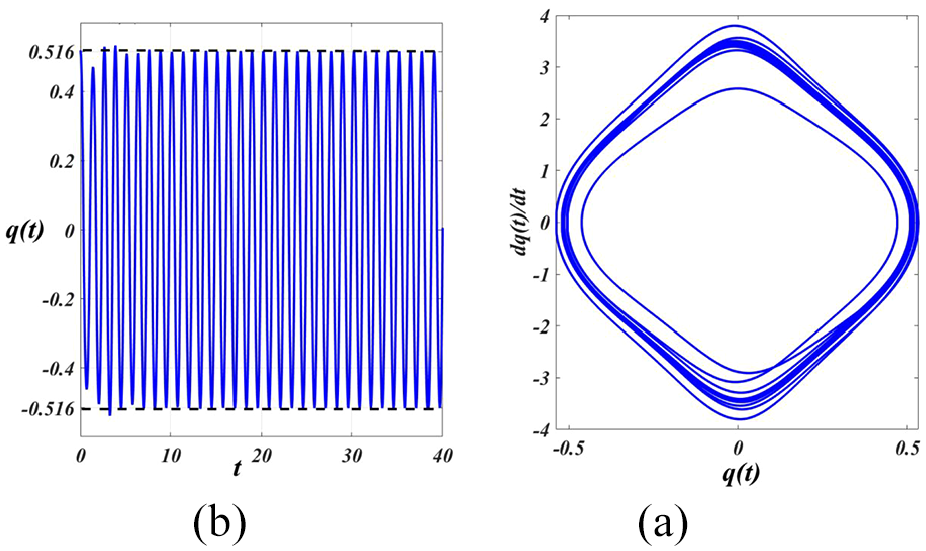
(a) The steady state forced response
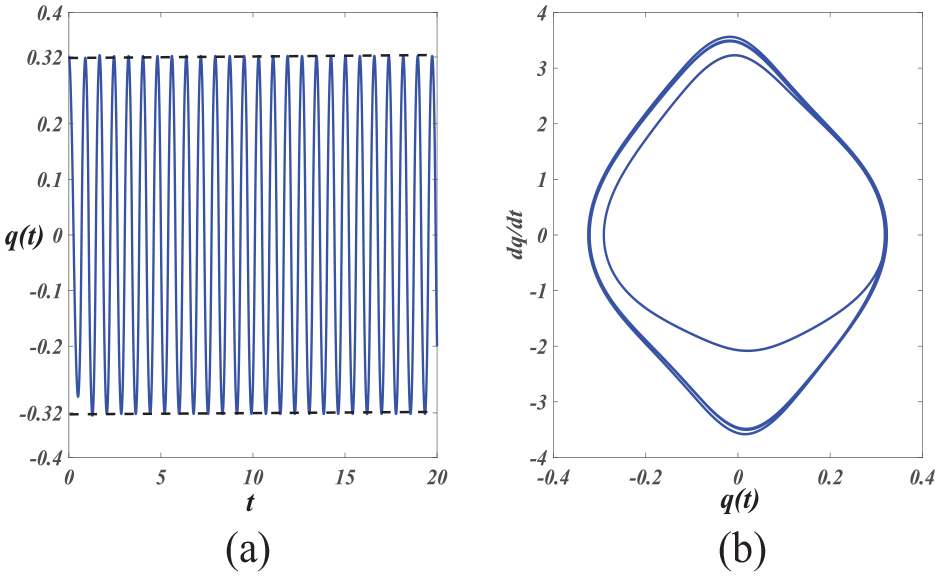
(a) The steady state forced response
Conclusions
The forced nonlinear response of cantilever and simply supported non-uniform Euler Bernoulli beams carrying point masses and subjected to concentrated harmonic forces have been examined. The beam’s height is kept constant, and its width is assumed to alter exponentially along the length of the beam. The governing integro-partial differential equation of motion was formulated using Newton’s second law of motion, and the Galerkin approach was utilized to convert it into an ordinary differential equation. The HB method in conjunction with the pseudo-arclength continuation scheme were applied to generate frequency-amplitude curves. Some results were validated by comparing them with those found using the direct numerical integration of the equation of motion. The effects of the non-uniformity parameter, the magnitudes of the attached masses, and the boundary conditions on the behavior of the non-uniform beams were carried out. The results reveal that these parameters have hardening impacts on the frequency-amplitude diagrams, and the jump-down and jump-up phenomena were observed. The impact of the non-uniformity parameter and the magnitudes of the attached masses on the response amplitude depend on whether the frequencies are swept on the upper or lower stable branches. It is believed that the outcomes may be useful for researchers working on examining the forced behavior of thin structures with non-uniform cross sections and carrying point masses, as it may have direct applications in designing resilient, innovative, and efficient infrastructure. For future work, it is recommended to consider other cross-sections, boundary conditions, and other effects such as thermal and aerodynamic forces.
Footnotes
Handling Editor: Divyam Semwal
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.