
Abstract
The continuous development of vehicle intelligence and electronic technology has greatly promoted the vigorous development of the automotive industry. The improvement demand of the trajectory tracking, driving safety, and stability of intelligent vehicles has become a hot issue. In order to solve the path tracking problem of vehicle, a high-precision approach for the vehicle path tracking optimization of based on the adaptive sparse collocation method (ASC) is presented. Firstly, a nonlinear 4-DOF vehicle model is established. Then the problem of path tracking with minimum time is transformed into an optimal control problem by the ASC method. Finally, the sequential quadratic programming (SQP) is used to solve the optimal control problem. The simulation results show that the proposed method can solve effectively the problem of vehicle path tracking. And also, the proposed controller can significantly improve the vehicle path tracking performance. It can further improve the path tracking accuracy and lateral stability of vehicles, providing a certain reference for the research on path tracking control of intelligent connected vehicles.
Introduction
The continuous development of vehicle intelligence and electronic technology has greatly promoted the booming development of the automotive industry. The improvement task in terms of the trajectory tracking, driving safety, and stability of intelligent vehicles has become a focus of research for many automotive companies. Accurate tracking of complex paths is one of the necessary conditions for achieving the stable vehicle operation. The goal of path tracking control is to make the vehicle travel according to the predetermined reference trajectory that is, to control the vehicle during its travel as much as possible along the reference trajectory through certain control methods, ensuring the stability of the vehicle handling and the comfort of the driver and passengers during driving. In recent years, with the rapid development of intelligent transportation, autonomous driving has become a hot research topic. As one of the important technologies for motion control of autonomous vehicles, path tracking has always been the focus of autonomous driving technology to ensure good tracking accuracy and vehicle stability under different operating conditions. When intelligent vehicles track paths, the tracking accuracy and stability are key indicators for evaluating the quality of tracking. When tracking complex and variable curvature roads, if the speed remains constant, intelligent vehicles may not meet the requirements of tracking accuracy and stability, and in severe cases, dangerous consequences such as rollover may occur.1–3
The problem of vehicle path tracking has been widely studied. A brief review is presented in what follows.
Wang et al. proposed a self-adaptive fuzzy control for autonomous driving of unmanned and autonomous ground vehicles.4,5 Fang et al. proposed a neural network method for path tracking. 6 Lu et al. 7 and Basso et al. 8 proposed a receding-horizon reinforcement learning algorithm and adaptive hybrid feedback control methods under control constraints. Wang et al. proposed a novel cloud-edge combined control system for using in future intelligent transportation systems. 5 Wang et al. developed a diagonally arranged parking robot for parking robots. 9 Liang et al. proposed a dynamic control system to address the trajectory tracking problem. 10 What’s more, more control methods are applied for path tracking. For example, a novel adaptive sliding mode control is presented in Ge et al. 11 ; an integrated controller is presented in Fang et al. 6 ; a cascade control is presented in Huang et al. 12 ; a novel path tracking method of tractor is presented in Wang et al. 13 and a distributed beam tracking scheme in Jang et al. 14 More path-tracking problem realized by different approaches could be found in He et al. 15 and Ruslan et al. 16
However, in the above research, due to the complex multi constraint and nonlinearity of the path tracking process, the vehicle cannot make changes according to the actual complex driving conditions during actual tracking, so it is unable to meet the accuracy of path tracking. In response to this issue, considering the complex road conditions in actual driving, the improving optimization strategies were developed to enhance the performance and accuracy of vehicle trajectory tracking. The problem of vehicle path tracking is a complex multi constraint, nonlinear optimal control problem. This article proposes a high-precision method for solving the optimal path tracking problem to address this issue. This method applies the node adaptive sparse collocation method to optimize the optimal path tracking trajectory, and then integrates the control variables obtained from the optimization into the dynamic equations. The integrated state variable values are used as new initial conditions to re-optimize the trajectory and improve the accuracy of the solution.
This paper presents a high-precision approach for the path tracking optimization of vehicle based on an adaptive sparse collocation method, aiming to solve the problem of vehicle path tracking. The remainder of the paper is organized as follows. Section “Mathematical model of vehicle path tracking problem” presents mathematical model of vehicle path tracking problem. Section “Optimization algorithm” provides the optimization algorithm, and Section “Numerical simulations and experimental verification” presents numerical simulations and experimental verification. Finally, Section “Conclusions” concludes the paper and provides future research directions.
Mathematical model of vehicle path tracking problem
Mathematical model of vehicle path tracking problem
The vehicle path tracking problem is described with a nonlinear 4-DOF vehicle model shown in Figure 1.
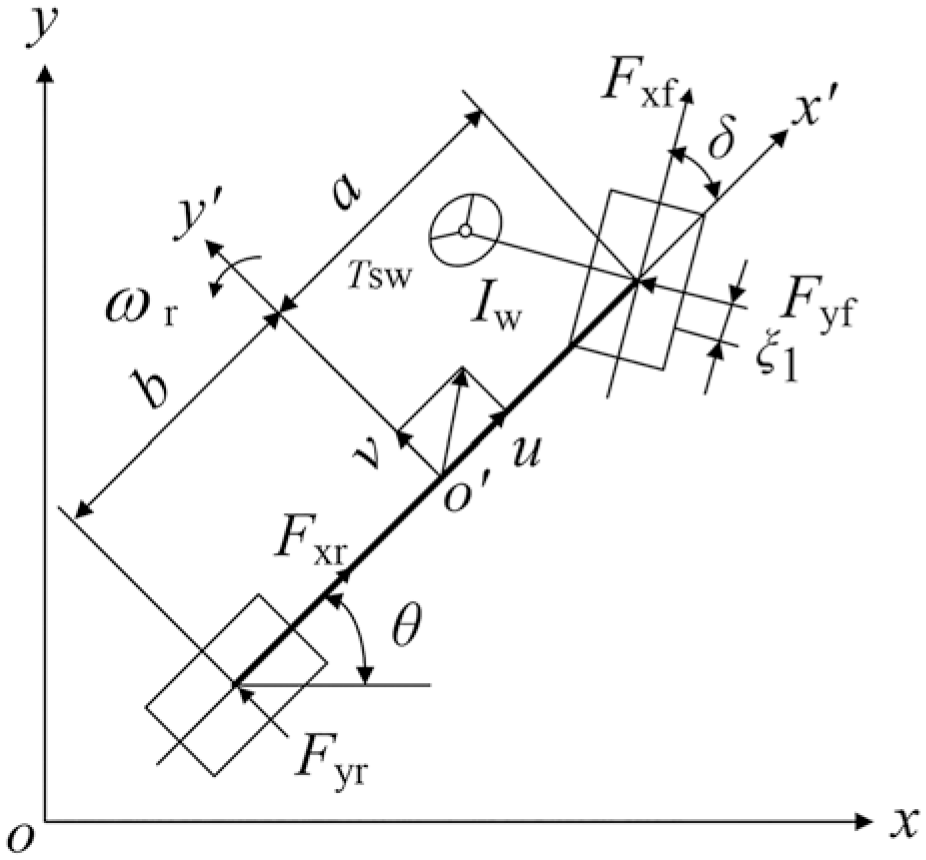
4-DOF vehicle model.
In state space form, it is:

The parameters and the corresponding definitions are shown in Table 1.
Parameter and definition.

The state and control variables are

Optimal control object of path tracking problem
For the minimum time control for path tracking problem, the cost function is:

where
Constrains
The initial and terminal states are described as:


The constraints on

So, the optimal control problem can be described as:

where
Optimization algorithm
Adaptive sparse local collocation method
The trajectory optimization problem essentially belongs to the optimal control problem. Taking the Bolza type optimal control problem as an example, it can be described as: the control variable solution

where
The state equation is:

The boundary constraint is:

The inequality path constraint is shown as:

where
The problem described in equations (9)–(12) is called a continuous Bolza type optimal control problem.
This article uses the local collocation method to solve the trajectory optimization problems. Firstly, the integral transform
where
It is set as

where
The

where

When
The nonlinear programming solution derived from this discretization consists in determining the parameters

and satisfying the constrains:




where
This study adopts the HS format, which requires the use of variables and function values at the midpoint of the interval. Therefore, the control variables at the midpoint of the interval are also used as optimization variables, and then path constraints are added at the midpoint of the interval, leading to

The optimization variables for NLP obtained in HS format are:

The objective function is:
The constraint condition is:




where

In the numerical optimization, the traditional trajectory optimization problem solution has a practical physical significance, but it is also necessary to add a time difference constraint:

The optimal solution of the trajectory optimization problem can be obtained by solving the NLP problem shown in equations (21)–(26). This article uses SNOPT developed by the Stanford University in the United States based on the SQP algorithm to solve the NLP problem. The sparse difference algorithm 17 is used to improve the calculation efficiency of NLP partial derivative, and the node thinning technology 18 is used to dynamically adjust the distribution of discrete nodes and to improve the adaptability of the trajectory optimization. If the first order Partial derivative matrix of NLP is integrated into the SNOPT, the calculation efficiency of optimization can be significantly improved, but the calculated amount of the partial derivative matrix is relatively large. The sparse difference method identifies the majority by analyzing the sparse characteristics of the matrix, and decomposes the value of the non-zero elements into the partial derivative of the original trajectory optimization problem through the matrix chain derivation operation, and then uses the sparse difference method to solve the optimization problem, greatly reducing the calculation amount of the partial derivative. The principle of node refinement technology consists in data compression. Each time after optimizing one trajectory, discrete nodes are compressed in smooth areas based on the changing characteristics of the trajectory, reducing the number of nodes. New nodes are inserted in non-smooth areas to make their distribution denser. And then the trajectory is optimized again. The overall effect is to use fewer discrete nodes to accurately describe the trajectory. The sparse difference method and node refinement technology both have strong universality and robustness. For solving the optimization problem described in this paper, only the threshold parameter shall be set to determine whether the trajectory is smooth.
Numerical simulations and experimental verification
Numerical simulations
This section uses CarSim to verify the feasibility and effectiveness of the optimal control problem of trajectory tracking.
The parameters and the corresponding definitions are shown in Table 2.
Simulation parameters.

Figure 2 contains the simulation result under

Simulation result under
Figure 2(a) indicates that because of the high road friction coefficient, the friction force between the ground and tires is enough to make the vehicle steer quickly and accurately, the actual path can follow the set reference trajectory for double lane changing. But the trajectory error at the peak is slightly large owing to the high setting speed of the vehicle. Figure 2(b) indicates that the front wheel angle of the vehicle changes smoothly. This occurs because the road can provide enough tire lateral forces to make the vehicle steer in accordance to the desired trajectory. The trend of changes in Figure 2(c) and (d) is almost consistent, and it can be seen from the figure that both the yaw rate and the sideslip angle of the vehicle have a relatively small range of overall smooth changes. This is because the proposed method can effectively control the vehicle side slip angle and the yaw rate at a high road friction coefficients which greatly reduces the possibility of skidding.
Figure 3 contains the simulation result under

Simulation result under
Figure 3(a) shows that the vehicle can still perform well in path tracking when the road friction coefficient is small, but the trajectory error becomes bigger under the low road friction coefficient. The reason is that the road cannot provide enough tire lateral forces to make the vehicle steer in accordance to the desired trajectory in a short period of time. In addition, at the exit of the double lane changing reference path, the vehicle no longer drives along the reference path, resulting in instability. Figure 3(b) indicates that the front wheel angle of the vehicle changes smoothly. From the figure, it can be seen that the front steering angle has a slight jitter under poor road conditions. However, in general, the front steering angle is still controllable. From Figure 3(c) and (d), it can be seen that the sideslip angle and yaw rate of the vehicle can be significantly reduced under the control of the proposed algorithm even under the poor road condition. Figure 3(d) indicates that the yaw rate exhibits four peak fluctuations. This is because after the road curvature reaches its maximum the tire forces reach saturation resulting in the peaks. The control strategy proposed in the article not only ensures the stability of the vehicle under high curvature conditions, but also ensures stable driving under poor road conditions.
Accuracy verification
To verify the algorithm accuracy, the proposed method was compared with the LQR method under the same parameter settings. The comparison results show that compared to the traditional LQR path tracking control method, the adaptive path tracking model proposed in this paper can effectively improve the accuracy and stability of vehicle path tracking under the same road adhesion coefficients and road curvatures in double lane changing simulation experiments (Figure 4).

Comparison results between the proposed method and LQR.
Evaluation of the calculation accuracy
The optimization results are shown in Table 3. It can be seen from the table that under the same accuracy conditions, the number of collocations and CPU time of the ASC are fewer than those of the GPM, which indicates that the proposed ASC has a higher solving efficiency for the vehicle path tracking problem.
Comparison of the number of collocations and CPU time.

Experimental verification
A virtual test adopting the Carsim software is conducted to verify the feasibility of the simulated results and the proposed method superiority by comparing it with the Gauss pseudospectral method (GPM). From Figure 5(b), (e), and (h), it can be seen that under double lane changing conditions, the errors obtained by the ASC method of lateral distance and steering angle as well as side slip angle are smaller than those of the GPM.

Experimental results of lateral distance and steering angle as well as sideslip angle: (a) lateral distance, (b) error of lateral distance, (c) steering angle, (d) error of steering angle, (e) error of sideslip angle, and (f) sideslip angle.
At the same time from Figure 5(c), (f), and (i), it can be seen that the average value of absolute error obtained by the ASC method of lateral distance and steering angle as well as side slip angle are smaller than those of the GPM. The detailed comparison results are shown in Table 4.
Comparison of mean values of absolute error between different methods.

It can be seen from Figure 5 that there are errors between the test and the simulated values, owing to failure in considering delays in the driver’s response and steering-wheel manipulation in the simulations. Further, the errors between the simulated values and the test values are because of each of the driver’s subjective feelings and driving skills being different, which leads to each driver’s response being different. Furthermore, there are certain errors in the test equipment. Concurrently, the model shown here is a linear 4-DOF vehicle model, where other non-linear factors such as suspension, tires, and steering are ignored. However, the simulated and experiment values have similar trends, which verify the correctness and feasibility of the proposed method. Both Figure 5 and Table 4 show that as compared with traditional GPM method, the proposed algorithm can control the vehicle to track the given path better, maintaining good tracking accuracy and driving stability.
Conclusions
The problem of vehicle trajectory tracking is a complex multi constraint, nonlinear optimal control problem. This article proposes a high-precision trajectory tracking control method to address this issue. This method first applies the node adaptive sparse collocation method to obtained the control variable integral dynamic equation system. Then the integrated state variable values are set as new initial conditions to obtain the optimal control integral dynamic equation system based on the overall optimization solution. Finally, according to the new optimal control integral dynamic equation system, it reaches the trajectory terminal. Simulation and experimental results indicate that the proposed method has the advantage of high control performance for solving the optimal path tracking control problem of intelligent vehicle including the condition of low coefficient of road adhesion. The results indicate that the vehicle can track the reference path well under the control by the proposed method. And the proposed algorithm has better path tracking performance compared to the LQR method. The research of the optimization problem of vehicle path tracking based on the proposed algorithm can improve the tracking accuracy and lateral stability of vehicle during path tracking, providing a reference for the research and development of key technologies in lateral control of intelligent connected vehicles.
The simulation results have a certain reference value for subsequent actual vehicle tests, and the next step will consider the practical significance of the controller on actual vehicles. However, in reality, the complexity of the vehicle system and its environment is much higher than that of the simulation environment. Although this article has set the relevant constraints on the road adhesion coefficient, there is still a certain gap in the actual road conditions. At the same time, the coupling relationship between the longitudinal and transverse directions of the vehicle was not considered. Therefore, the control algorithm still needs to be further improved to enhance its applicability in real environments and control stability.
Footnotes
Handling Editor: Chaofang Hu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Open Research Program of Huzhou Key Laboratory of Urban Multidimensional Perception and Intelligent Computing under Grant No. UMPIC202404. And this research was also financially supported by the National Natural Science Foundation of China under Grant No. 52107231. The authors gratefully acknowledge the supporting agencies.
Data availability
The related data used to support the findings of this study are available from the corresponding author upon request.