In this paper, a fast fixed-time backstepping control approach is developed for systems with mismatched disturbances. A novel fast fixed-time disturbance observer (FFTDO), which is convergent within fixed time regardless of initial conditions, is designed to efficiently estimate and compensate the disturbances. On the basis of FFTDO, a novel fast fixed-time backstepping control scheme is proposed, which can guarantee fast fixed-time convergence and high steady-state precision. In addition, a novel fixed-time filter is used to circumvent the problem of “explosion and complexity,” and to ensure overall fixed-time convergence. The fixed-time stability of the closed-loop system under the proposed controller is proved by the Lyapunov stability theory. The simulation results are carried out to confirm the feasibility and superiority of the proposed control strategy.
Mismatched disturbances widely exist in many practical systems, which may lead to performance degradation of the control systems.1–4 To achieve high control performance and strong robustness, several classical control design tools have been extensively employed to nonlinear systems with mismatched disturbances, such as LMI-based method,5 Riccati method,6 adaptive method,7 and backstepping method.8 Among these methods, backstepping control is a simple and effective method by using variable virtual control laws, which can not only guarantee global stability but also achieve good tracking performance in practical implementation.
As known, conventional backstepping control has two main drawbacks. One is weak robustness. For this problem, combining backstepping control with other robust control approaches is a usual solution. In Ahmadi et al.’s9 paper, a novel backstepping controller using adaptive control technique was designed for wheeled mobile robots. In Liu et al.’s10 paper, a new robust backstepping control strategy combining sliding mode control and neural networks was presented for spacecraft attitude regulation. In Zhang et al.’s11 paper, a disturbance observer-based backstepping control was developed for the optoelectronic stabilized platform affected with disturbances, which could improve the system tracking performance. In Liu et al.’s12 paper, sliding mode control method and disturbance observer technique were introduced to backstepping controller to improve the system performance against uncertainties. The other is the “explosion of complexity” problem, which is caused by repeated differentiations of virtual control. The common method to address this problem is to adopt filters such as first-order filters13 and command filters14 to obtain indirect differentiation. The dynamic surface control was proposed by Swaroop et al.,15 which can circumvent the problem of “explosion of complexity” by using a first-order filter at every step of conventional backstepping control. The backstepping control with first-order filters at every step is also known as dynamic surface control, and it has been successfully employed to various applications, such as pure feedback nonlinear systems,16 two-axis frame systems,17 robots,18 and aircrafts.19 The command-filtered backstepping is another effective control method. Command filters are used to produce virtual signals and approximate the derivatives of virtual signals,20–23 and the errors resulting from the command filters can be reduced by combining compensation signals. It is noted that the conventional backstepping control and the modified backstepping control can only guarantee the closed-loop system asymptotically stable.
Compared with asymptotic control, finite-time control has more superior performance in terms of fast response and high control precision. Nevertheless, finite-time control cannot guarantee system stabilization within bounded time regardless of initial conditions.24 For various systems, the unknown initial states may result in large convergence time, which hinders the practical applications. Thus, it is necessary to design a robust controller that can guarantee system stabilization within bounded time. The fixed-time stability was firstly put forward in Polyakov,25 where the convergence time was bounded and irrelevant to the initial states. Zuo et al.26 developed a robust fixed-time control for generic linear systems in the existence of matched and mismatched disturbances. Golestani et al.27 presented a novel fixed-time control for a flexible spacecraft. The results of literature26,27 cannot solve the fixed-time tracking problem for the high-order nonlinear systems with mismatched disturbances. In Huang et al.’s28 paper, the fixed-time backstepping control strategy was employed to the power system. Qiang et al.29 proposed a fixed-time backstepping control scheme for a class of nonlinear system against mismatched disturbances. In Yuan et al.’s30 paper, a adaptive fixed-time control was presented for nonlinear systems with full-state constraints. Nevertheless, speed up the convergence speed of fixed-time control is of great importance.
Combining backstepping method with fixed-time control can improve the convergence property of the backstepping method. Moreover, we can utilize command filters to circumvent the problem of “explosion of complexity” and utilize disturbance observers to improve the robustness in backstepping control. However, several existing filters and disturbance observers may not guarantee overall fixed-time stability. Fixed-time control for n-order systems with mismatched and matched disturbances is still a challenging task. Furthermore, how to enhance the convergence rate and the control precision of systems is still valuable for further research and is of great importance.
Motivated by the above analysis, this paper focuses on the development of a fast fixed-time backstepping control for n-order systems with mismatched disturbances such that superior performance including fast fixed-time convergence and high steady-state precision are provided. The main contributions of this paper are outlined as follows: (1) A novel fast fixed-time disturbance observer (FFTDO) is designed to estimate matched and mismatched disturbances, whose convergence time is irrelevant to initial states. (2) During the process of control design, the “explosion of complexity” problem is handled by employing a novel fixed-time filter. (3) With the help of the FFTDO and fixed-time filter, the fast fixed-time backstepping control (FFTBC) is developed, which can guarantee the fixed-time stability of the overall system with fast response and high control precision in the presence of mismatched and matched disturbances. FFTBC combines the advantages of both fixed-time control and dynamic surface control.
Problem statement
Nonlinear dynamic systems
Consider a system with mismatched disturbances, defined by
where denotes the system state. denotes the control input. represents the unknown disturbance. and are smooth nonlinear functions in terms of .
This paper attempts to develop a novel fast fixed-time backstepping control method for system (1) such that the system output can track the desired reference signal within fixed time based on the following assumptions.
Assumption 1. The disturbance in system (1) and its derivative are bounded by , , where and are positive constants.
Assumption 2. The desired reference signal and its time derivative are known and bounded.
Assumption 3. The function satisfies the condition of , . Here, is positive constant.
Useful lemmas
The following lemmas will be used in the analysis.
Lemma 1. For any positive real numbers , and , the following inequality holds31:
Lemma 2. For any positive real numbers , , and positive constants , satisfying that , the following relation holds32:
Lemma 3. For any nonnegative real numbers , , and , the following two relations hold33:
Lemma 4. Consider a positive Lyapunov function that satisfies the following equality
where , , . The function can be stabilized to the origin with the convergence time bounded by
Proof. Denote and , applying (5), the time derivative of is
Solving (7), the upper bound of convergence time can be estimated as
Define and , and denote and as the initial value of and , we obtain
Then,
The proof of Lemma 4 is completed.
Lemma 5. Consider the dynamic system
where , and is continuous on an open neighborhood of the origin, and . Suppose there exists a positive definite and radially unbounded function , and an arbitrarily small positive real number , , and such that . Then, the system will converge into an arbitrarily small region near the origin, that is, with in fixed time given by
Proof. The dynamics of function can be expressed as
For and in accordance with Lemma 1, one obtains . For , if , one obtains .34 Then, we have
Denote , there is
On the basis of Lemma 4, the convergence time can be estimated as
It is concluded that the function can converge to arbitrarily small region near the origin, that is, with , within fixed time regardless of initial states. It is easy to demonstrate that when system trajectory enters into the ultimate bound, the relation holds. Thus, any system trajectory entering into the ultimate bound will persistently remain in it.
The proof of Lemma 5 is completed.
Fast fixed-time backstepping control design based on fixed-time disturbance observer
Fixed-time disturbance observer design
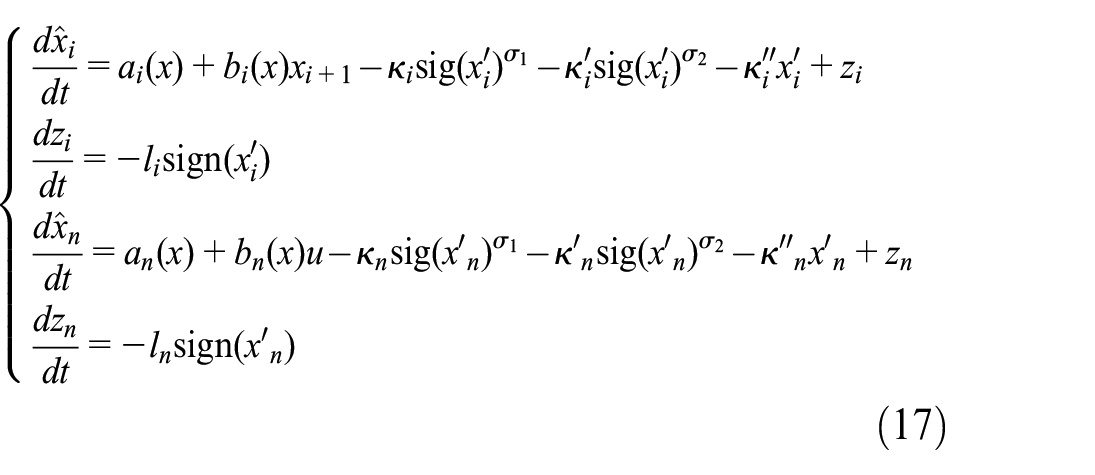
Motivated by the work of Yan et al.,35 a fast fixed-time disturbance observer (FFTDO) is constructed as
where is the estimation of , . when is from 1 to . and .
The estimated disturbance can be expressed as
where is the estimation of , is from 1 to .
Theorem 1. For system (1), the disturbance observer is designed as (17). Then, the disturbance observer error of the FFTDO can converge to the zero uniformly in fixed time, given by
where , , , and represents the base of the natural logarithms.
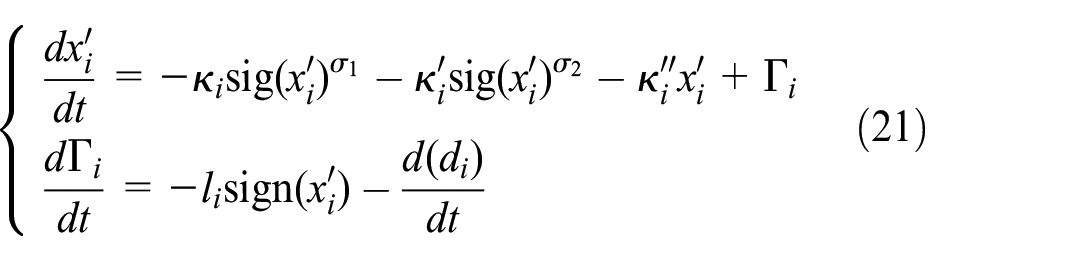
Proof. Denote . Taking the time derivative of and combining (1) and (17), we obtain
The estimate error dynamics can be expressed as
where is an auxiliary variable.
For (21), . when , it can be obtained
In accordance with Lemma 4 and (22), can converge to equilibrium in a fixed time
Considering the second equation of (18), by the end of , is upper bounded by
The trajectory of the system (18) starts at for . According to Wang et al.’s28 paper, the latter trajectory converges to the equilibrium for a time
in which represents the time interval between the consecutive intersection of the trajectory with the axis , such that and . According to Wang et al.’s28 paper, and the mandatory condition for convergence of the time series (25) is . Then, can be given by
It should be pointed out that the condition in
Theorem 1 is the necessary condition for the convergence of the FFTDO. When converges to the origin, the observer error of the FFTDO converges to zero:
Thus, the convergence time is estimated as
The proof of Theorem 1 is completed.
Fixed-time filter design
A novel fixed-time filter is introduced as
where , . and represent the input and output values of the filter, respectively.
Remark 1. Denote the filter tracking error . The time derivative of the filter tracking error can be derived that . Suppose is satisfied and there exists a sufficiently small time constant for any given positive number . Then, according to Lemma 5, it is easy to prove that will converge to the region in fixed time. Next, the approximation performance of first-order differential of the filter tracking error is considered. Define the first-order differential of the filter tracking error as . Then . If is satisfied and there is a sufficiently small time constant for any given positive number , then will exponentially converge to the region .
Remark 2. In the existing literature, the widely-used first-order filter is . Here, is a small time constant. To guarantee tracking accuracy, the parameter needs to be enough small. Nevertheless, in the proposed fixed-time filter, the parameters , and all play the important role in determining the convergence speed and tracking precision, thus the demand for parameter is relaxed.
Fast fixed-time backstepping controller design
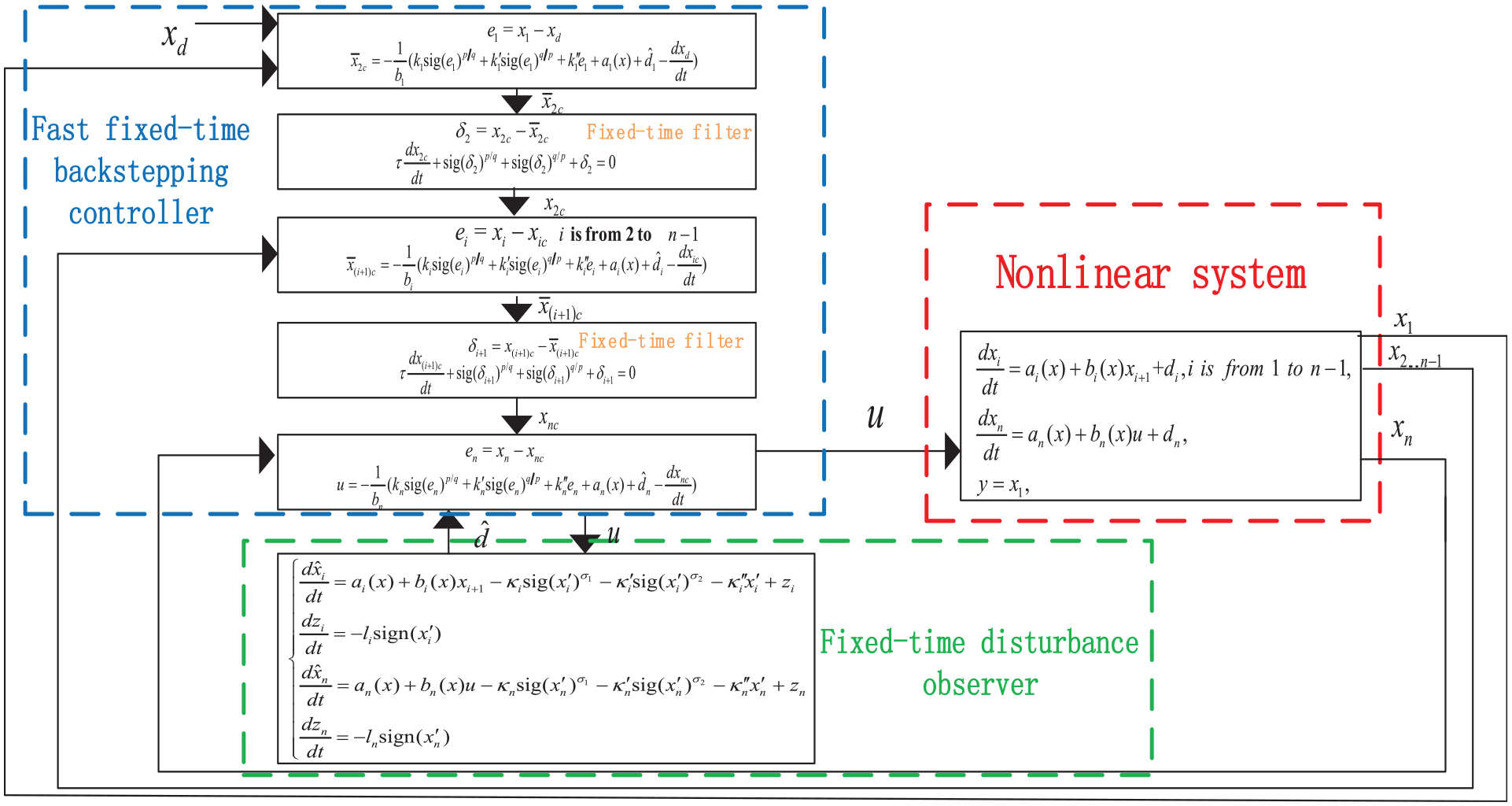
In this subsection, a fast fixed-time backstepping controller based on FFTDO is developed. The structure diagram of the proposed control strategy is shown in Figure 1. The design procedure contains steps. At each step, a virtual control law is constructed to obtain fixed-time stability for each state variable. Finally, the control law is designed at step .
Step 1: Consider the first equation of system (1). Define the tracking error of as , taking the derivative of yields
Structure diagram of the proposed control strategy.
To obtain fixed-time convergence for error variable , the virtual control law can be derived as
where , , and is the estimation of by the FFTDO (17).
Similar to the dynamic surface control, a new state variable is introduced to avoid the direct differentiation of the virtual control law . Moreover, to ensure overall fast fixed-time convergence, the proposed fixed-time filter is employed
Define the filter error . Differentiating yields
Substituting (31)–(32) into (30), we obtain
Step : Consider the equation of system (1). Define the tracking error of as , the time derivative of is
To obtain fixed-time convergence for error variable , the virtual control law can be constructed as
The proposed fixed-time filter is designed as
The filter error is expressed as . Taking the derivative of results in
Substituting (36)–(37) into (35) leads to
Step : Consider the final equation of system (1). Define the tracking error of as , the time derivative of is
Then, the control law can be established as
Substituting (41) into (40), we get
Stability analysis
This section presents the fixed-time stability analysis of the system (1) under the proposed control method.
Assumption 4. There is a positive constant so that the initial condition satisfies the inequality .
Remark 3. It is worth noticing that Assumption 4 is not really restrictive because can be designed large enough.
Theorem 2. For the system (1) under abovementioned assumptions, the disturbance observer is designed as (17) and the control law is designed as (41). Then, the system output will track the desired reference signal within fixed time.
Proof. We consider a Lyapunov function in the following form
It can be deduced from Theorem 1 that can converge to zero within fixed time . It means that for all , . Then, equation (43) can be rewritten as
Combining (33)–(34), (38)–(39), and (42), the time derivative of can be obtained
In accordance with the control objective and Assumption 4, there are positive constants and such that and are compact sets in and respectively. is a compact set in .34 Thus, is upper bounded satisfying that on .
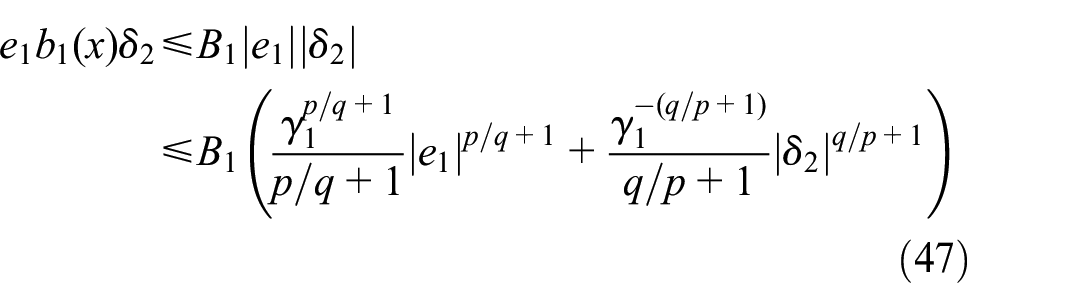
Based on Assumption 3 and Lemma 2, the following inequalities can be obtained
Substituting (46)–(50) into (45), it can be derived that
where , , , , , .
For convenience, we define , , , and as follows
From (51)–(52) and using Lemmas 3 and 4, we get
where , , .
The parameters can be chosen satisfying the inequality . When the initial condition satisfies Assumption 4, it can be obtained that . Thus, is an invariant set, that is, if , then it can be known that for all . The ultimate bound of the overall system can be derived from the following equation
It is noted that (54) is a polynomial algebraic equation with fractional exponent. The analytical solution of this equation is difficult to be obtained. Nevertheless, the ultimate bound of the overall system can be roughly estimated by solving the following equations
Solving (55), the ultimate bound of the overall system is obtained as
With appropriate control parameters and according to Lemma 5, the system output can track the desired reference signal within a finite time bounded by
Considering the convergence time of FFTDO, the total convergence time of system (1) is .
The proof of Theorem 2 is completed.
Simulation results and discussion
Example 1. The advantages of the proposed filter (29) will be shown in comparison with several present filters. The desired reference signal is set as . The initial values are set as , .
Different filters can be expressed as: (1) The proposed filter: , (2) The first-order filter13: , (3) The finite-time filter36: , (4) The fixed-time filter34: . Define and .
For fair comparison, the parameters of these filters are set as: , , and . Comparison simulation results are displayed in Figures 2 and 3. Figure 2 shows the performance of state tracking error under these four filters, and Figure 3 illustrates the approximation of first-order differential of the state tracking error under these four filters. It is obvious that the proposed fixed-time filter has superior approximation performance over the other three existing filters.
Example 2. Consider a single-link manipulator system including actuator dynamics, the system mathematical model can be expressed as37,38
where stand for the link angular position, velocity and acceleration, respectively. is the lumped inertia, is the friction coefficient, is the lumped load term, is the rotor inductance, is the motor current, is the rotor resistance, is the voltage, is the back-emf coefficient. and denote external disturbances. Here, the parameters are given as , , , , , and .
State tracking error of filters.
First-order differential of state tracking error of filters.
Define , , , and . The system model can be rewritten as
where , , , , .
The initial states are . The disturbances are assumed as for , for , for , for .The reference signal 1 is set as . The reference signal 2 is set as .
Here, to verify the performance of FFTDO, a fixed-time disturbance observer (FTDO) used in Xia et al.8 is selected for validation. Figures 4 and 5 show the tracking performance of the FFTDO and FTDO. It can be founded from figures that the proposed FFTDO can accurately estimate the mismatched and matched disturbances in fixed time, which is lined with Theorem 1. Moreover, the proposed FFTDO can achieve faster tracking performance compared to the FTDO. The parameters of FFTDO are set as , , , , , .
(a) and its estimation ; (b) the zoomed section of image (a).
(a) and its estimation ; (b) the zoomed section of image (a).
To illustrate the superiority of the proposed control method, Zhang’s controller in Zhang and Yang37 is selected for comparison. The design procedure of the proposed controller for system (59) are listed in Table 1. The parameters of the fast fixed-time backstepping controller are selected as , , , , , .
Design procedure of the proposed control method.
Sequence
Fast fixed-time backstepping control
Virtual law
New error variable
Error
Virtual law
New error variable
Error
Control law
The performance comparisons of the angular position tracking trajectory under the reference signal 1 and 2 are shown in Figures 6 and 8, respectively. The corresponding position tracking errors are depicted in Figures 7 and 9, respectively. It is obviously seen from Figures 6 to 9 that the proposed method responds faster and takes shorter time for the position tracking error convergence to a small region compared to the other controller. Moreover, the proposed method obtains smaller steady-state error than that of the other method.
(a) Angular position under the reference signal 1; (b) the zoomed section of image (a).
(a) Angular position tracking error under the reference signal 1; (b) the zoomed section of image (a).
(a) Angular position under the reference signal 2; (b) the zoomed section of image (a).
(a) Angular position tracking error under the reference signal 2; (b) the zoomed section of image (a).
To make the comparisons more accurately, the root-mean-square error (RMSE) and the Maximum error (MAE)39 are calculated using the steady simulation experiment data. The calculation results are displayed in Table 2. As can be seen from Table 2, compared with Zhang’s controller, the RMSE and MAE under the proposed control strategy are smaller, which shows that the proposed controller has the better control performance.
Performance comparisons of two controllers.
Case
Controller
RMSE
MAE
The reference signal 1
Zhang’s
0.0117
0.0021
The proposed
0.0094
0.0011
The reference signal 2
Zhang’s
0.0132
0.0032
The proposed
0.0097
0.0014
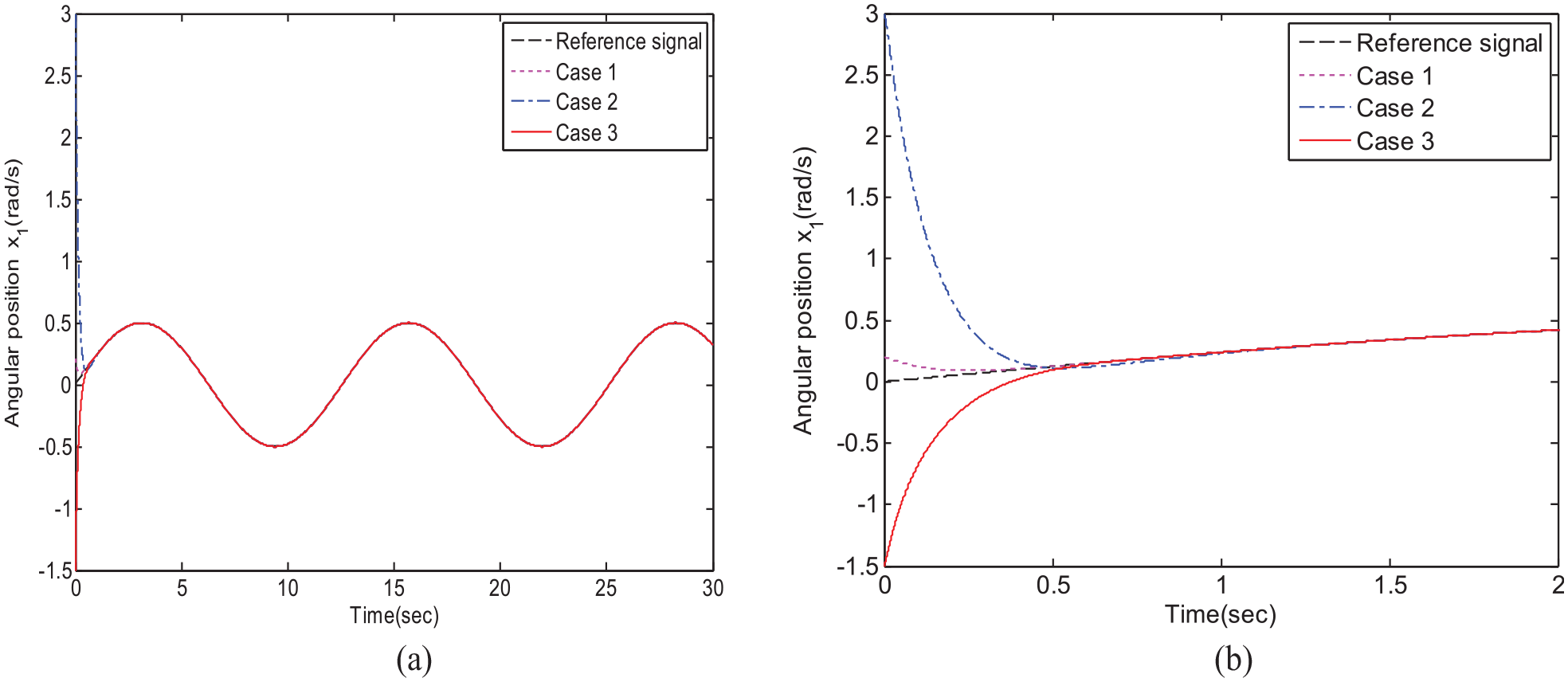
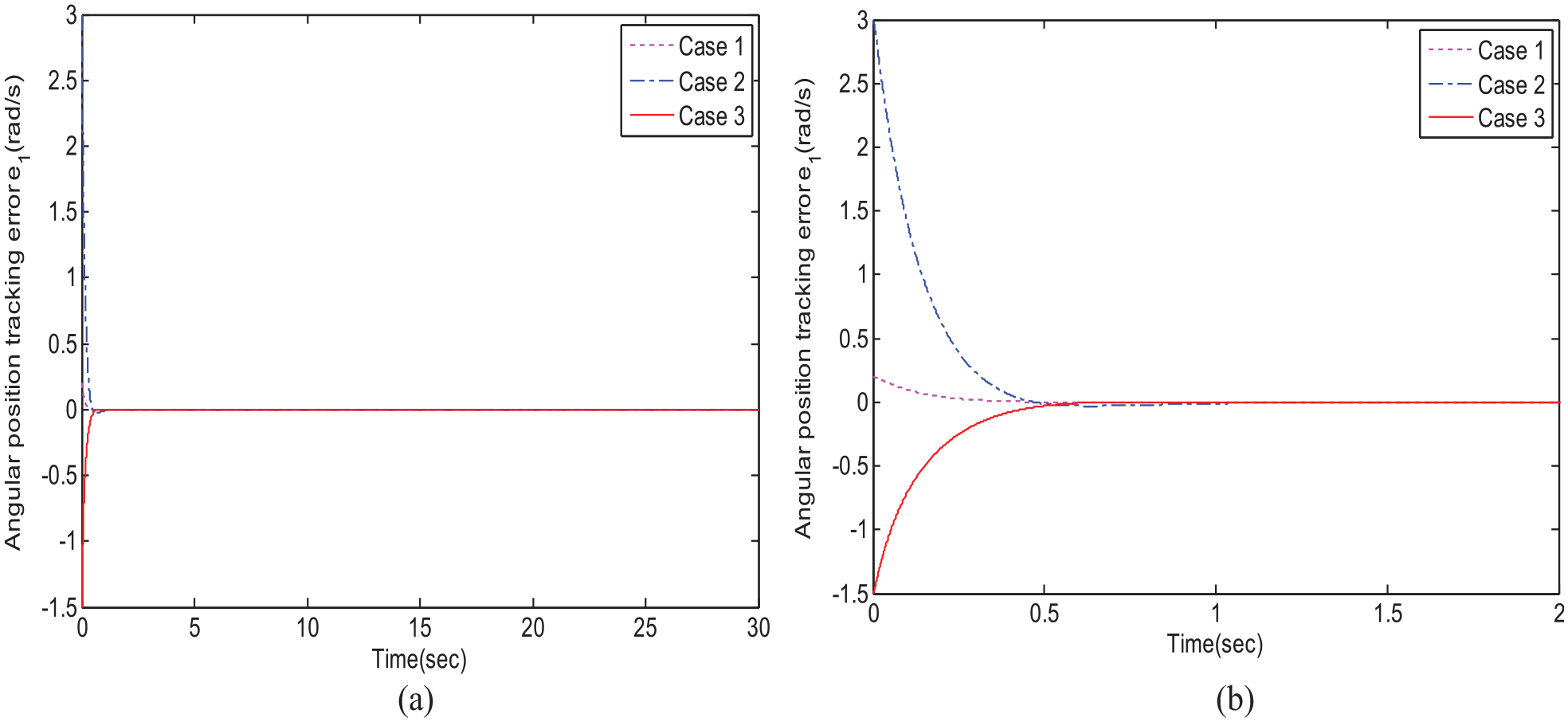
To confirm the fixed-time convergence of the system under the proposed control method, different cases are considered as: (1) Case 1: , (2) Case 2: , (3) Case 3: .
As shown in Figure 10, the convergence time of system (58) with three different initial conditions are so close, which implies that the total convergence time is weak dependence on the initial states. The tracking error signals are depicted in Figure 11. Observed by Figure 11, the total convergence time of these three cases are upper bounded by 2 s, which verifies the upper-bound estimation in Theorem 2. The simulation results confirm that the angular position tracking error can converge to the equilibrium within fixed time, which indicates that the total convergence time is irrelevant to initial conditions and can be acquired in prior by the designed controller parameters.
(a) Angular position with different initial states; (b) the zoomed section of image (a).
(a) Angular position tracking error with different initial states; (b) the zoomed section of image (a).
All in all, it can be acclaimed that the proposed observer-based fast fixed-time backstepping control approach is available to achieve satisfactory fixed-time stabilization for n-order systems with mismatched and matched disturbances. Furthermore, comparative simulation results verify that the proposed control scheme has more superior performance with respect to fast dynamic response and high control precision compared to the other control method.
Conclusion
In this paper, a fast fixed-time backstepping control strategy is developed for systems with mismatched disturbances. The FFTDO is designed to estimate and compensate the disturbances, which can effectively enhance the robustness of the system. The fixed-time filter is employed to eliminate the problem of “explosion of complexity.” A fast fixed-time virtual control law is designed for each step, which can guarantee the fixed-time convergence and high steady-state precision. The fixed-time stability of the system is analyzed by the Lyapunov theory. Corresponding simulation results confirm the effectiveness and superiority of the proposed control approach. Notable is, we do not consider the input constraint, which may result in the degradation of tracking performance. The fast fixed-time control problem of n-order systems with input constraints will be our further research work.
Footnotes
Handling Editor: Sharmili Pandian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the University Natural Science Research Project of Anhui Province (no. 2022AH051759), by Provincial Foundation for Excellent Young Talents of Colleges and Universities of Anhui Province (no. GXYQ2022094) and Talent Research Launch fund project of Anhui Province Tongling University (no. 2022tlxyrc33,2022tlxyrc34).
ORCID iDs
Huihui Pan
Peng Gao
References
1.
LuoYPangJCaoJ, et al. Finite-time dynamic event-triggered consensus of multi-agent systems with mismatched disturbances based on disturbance observer. J Franklin Inst2023; 360: 10876–10892.
2.
MoulayELéchappéVBernuauE, et al. Fixed-time sliding mode control with mismatched disturbances. Automatica2022; 136: 110009.
3.
LinXLiuJLiuF, et al. Fractional-order sliding mode approach of buck converters with mismatched disturbances. IEEE Trans Circuits Syst I Regul Pap2021; 68: 3890–3900.
4.
ZhaoHWangHNiuB, et al. Event-triggered fault-tolerant control for input-constrained nonlinear systems with mismatched disturbances via adaptive dynamic programming. Neural Networks2023; 164: 508–520.
5.
AnsariJAbbasiAFirouziB.Decentralized LMI-based event-triggered integral sliding mode LFC of power systems with disturbance observer. Int J Electr Power Energy Syst2022; 138: 107971.
6.
NekooSROlleroA.A robust state-dependent Riccati equation controller with parameter uncertainty and matched disturbance. J Franklin Inst2023; 360: 14584–14595.
7.
TianBLiZZhangX, et al. Adaptive prescribed performance attitude control for RLV with mismatched disturbance. Aerosp Sci Technol2021; 117: 106918.
8.
XiaJOuyangHLiS.Fixed-time observer-based back-stepping controller design for tower cranes with mismatched disturbance. Nonlinear Dyn2023; 111: 355–367.
9.
AhmadiSMTaghadosiMBHaqshenasMA.A state augmented adaptive backstepping control of wheeled mobile robots. Trans Inst Meas Control2021; 43: 434–450.
10.
LiuEYanYYangY.Neural network approximation-based backstepping sliding mode control for spacecraft with input saturation and dynamics uncertainty. Acta Astronaut2022; 191: 1–10.
11.
ZhangMGuanYLiC, et al. Backstepping control for the optoelectronic stabilized platform based on adaptive fuzzy logic system and nonlinear disturbance observer. Nonlinear Dyn2023; 111: 8347–8368.
12.
LiuSWhidborneJHeL.Backstepping sliding-mode control of stratospheric airships using disturbance-observer. Adv Space Res2021; 67: 1174–1187.
13.
WangFZouQZongQ.Robust adaptive backstepping control for an uncertain nonlinear system with input constraint based on Lyapunov redesign. Int J Control Autom Syst2017; 15: 212–225.
14.
DatouoRAhandaJMelinguiA, et al. Adaptive fuzzy finite-time command-filtered backstepping control of flexible-joint robots. Robotica2021; 39: 1081–1100.
15.
SwaroopDHedrickJYipP, et al. Dynamic surface control for a class of nonlinear systems. IEEE Trans Autom Control2000; 45: 1893–1899.
16.
LiuHZhangTXiaX.Adaptive neural dynamic surface control of MIMO pure-feedback nonlinear systems with output constraints. Neurocomputing2019; 333: 101–109.
17.
KhayatianMArefiM.Adaptive dynamic surface control of a two-axis gimbal system. IET Sci Meas Technol2016; 10: 607–613.
18.
TruongTVoAKangH.A backstepping global fast terminal sliding mode control for trajectory tracking control of industrial robotic manipulators. IEEE Access2021; 9: 31921–31931.
19.
CaoLLiXHuY, et al. Discrete-time incremental backstepping controller for unmanned aircrafts subject to actuator constraints. Aerosp Sci Technol2020; 96: 105530.
20.
LiuYLiuJWangQG, et al. Adaptive command filtered backstepping tracking control for AUVs considering model uncertainties and input saturation. IEEE Trans Circuits and Syst II Express Briefs2022; 70: 1475–1479.
21.
LiuWDuanGHouM.Concurrent learning adaptive command filtered backstepping control for high-order strict-feedback systems. IEEE Trans Circuits Syst I Regul Pap2023; 70: 1696–1709.
22.
SoukkouYSoukkouATadjineM, et al. Robust adaptive finite time command filtered backstepping control for uncertain output constrained strict-feedback nonlinear systems. Int J Dyn Control2024; 12: 1436–1446.
23.
JiangMYangYGaoC, et al. Command filtered backstepping-based containment control for a class of multi-agent systems with uncertainty. Int J Robust Nonlinear Control2024; 33: 10567–10583.
24.
LiuYLiHLuR, et al. An overview of finite/fixed-time control and its application in engineering systems. IEEE/CAA J Autom Sin2022; 9: 2106–2120.
25.
PolyakovA.Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control2011; 57: 2106–2110.
26.
ZuoZSongJTianB, et al. Robust fixed-time stabilization control of generic linear systems with mismatched disturbances. IEEE Trans Syst Man Cybern Syst2020; 52: 759–768.
27.
GolestaniMEsmaeilzadehSMobayenS.Fixed-time control for high-precision attitude stabilization of flexible spacecraft. Eur J Control2021; 57: 222–231.
28.
HuangSWangJXiongL, et al. Fixed-time backstepping fractional-order sliding mode excitation control for performance improvement of power system. IEEE Trans Circuits Syst I Regul Pap2021; 69: 956–969.
29.
QiangJLiuLXuM.Fixed-time backstepping control based on adaptive super-twisting disturbance observers for a class of nonlinear systems. Int J Control2022; 95: 2294–2306.
30.
YuanXChenBLinC.Neural adaptive fixed-time control for nonlinear systems with full-state constraints. IEEE Trans Cybern2023; 53: 3048–3059.
31.
XieXDuanNZhaoC.A combined homogeneous domination and sign function approach to output-feedback stabilization of stochastic high-order nonlinear systems. IEEE Trans Autom Control2014; 59: 1303–1309.
32.
HardyGHLittlewoodJEPólyaG.Inequalities. Cambridge: University Press, 1951.
33.
ZuoZTieL.A new class of finite-time nonlinear consensus protocols for multi-agent systems. Int J Control2014; 87: 363–370.
34.
NiJLiuLLiuC, et al. Fixed-time dynamic surface high-order sliding mode control for chaotic oscillation in power system. Nonlinear Dyn2016; 86: 401–420.
35.
YanYYuSYuX.Quantized super-twisting algorithm based sliding mode control. Automatica2019; 105: 43–48.
36.
WangYSongY.Fraction dynamic-surface-based neuroadaptive finite-time containment control of multiagent systems in nonaffine pure-feedback form. IEEE Trans Neural Networks Learn Syst2016; 28: 678–689.
37.
ZhangLYangJ.Continuous nonsingular terminal sliding mode control for nonlinear systems subject to mismatched terms. Asian J Control2022; 24: 885–894.
38.
ZhouJZhouRWangY.Robust nonlinear reduced-order dynamic controller design and its application to a single-link manipulator. Proc 2001 IEEE Int Conf Rob Autom2001; 2: 1149–1154.
39.
WangYChenJYanF, et al. Adaptive super-twisting fractional-order nonsingular terminal sliding mode control of cable-driven manipulators. ISA Trans2019; 86: 163–180.