
Abstract
A fixed time robust control method is presented for trajectory tracking control of quadrotor systems with motor dynamics in the presence of unmodeled disturbances and external disturbances. The recommended control method avoids the negative effect to the quadrotor system caused by motor dynamic which is considered as first-order dynamic with dynamic disturbance. And fixed time extended state observer is adopted to estimate the composite disturbances and obtain the first and second derivative of desired trajectory and virtual control. Together with fixed time convergence control method, the stability and convergence characteristics of quadrotor system can be guaranteed. Finally, several simulations prove the effectiveness of the novel method with different time constants of motor dynamics.
Keywords
Introduction
In recent years, due to the significant characteristics of quadrotor in maneuverability, hovering, low-cost manufacturability, and vertical taking off and landing, the quadrotor has attracted a lot of attention. It is widely applied in military and civilian areas, such as monitoring, security, surveillance, and film production. In severe environment, quadrotors are difficult to be controlled by flight control manipulator. Thus, it needs to design a trajectory tracking controller to provide the automation of task operation.
Some robust control methods have been proposed for high-order complicate systems. 1 –4 However, for quadrotor, the position and attitude are controlled by the four motors which lead to the under-actuation, strongly coupled, and nonlinear of quadrotor. As a result, the control of quadrotor is more difficult and complicated than other flight. At first, the significant challenge is to ensure the stability and convergence characteristic of quadrotor. In recent years, advanced control methods have been applied in the field of quadrotor, such as sliding mode control, 5 –7 backstepping control, 8,9 and dynamic inversion. 10,11 Due to the excellent stability of sliding mode control method, it is widely used in the quadrotor control. Fuyang Chen et al. 12 propose a robust nonlinear controller with sliding mode control method and backstepping control technique. Zhenyue Jia et al. 13 designe a nonlinear control method with integral back stepping with the sliding mode control to stabilize the quadrotor attitude and to track the desired trajectory. Yang and Yan 14 proposed an adaptive fuzzy gain-scheduling sliding mode control approach for attitude regulation of quadrotor. Otherwise, to improve the convergence rate of quadrotor, finite time convergence method is used in the control of quadrotor. Wenwu Zhu et al. 15 proposed a finite time controller for the quadrotor aircraft to achieve hovering control in a finite time. S Harshavarthini et al. 16 proposed a finite time reliable control method for nonlinear quadrotor attitude dynamic model. Furthermore, on the basis of finite time convergence theory, Ai and Yu 17 proposed a flatness-based finite time sliding mode control method which the finite time do not depend on the system state to address the trajectory tracking problem.
The quadrotor is influenced by unmodeled disturbance such as aerodynamic effects and inertial torques during flight. Besides, the external disturbance should be considered in the design procedures of quadrotor. The robustness of quadrotor control has attracted a lot of attention. To guarantee the robustness of systems, some methods have been developed, such as disturbance observer 18,19 and extended state observer (ESO). 20 In the above method, ESO is able to estimate the disturbance that has adverse effects on the output by merely using model information. 21 And it is also widely used in quadrotor control to compensate the adverse impact to the system caused by disturbance. 22 –26 Xingling Shao et al. 27 present an ESO-based robust dynamic surface trajectory tracking controller for a quadrotor subject to parametric uncertainties and external disturbances. ESO is constructed to estimate online the unmeasurable velocity states and lumped disturbances. An attitude control problem is addressed for a quadrotor with modeling uncertainties and unknown disturbances, 28 and ESO is constructed to provide the estimation of the composite disturbances. Di Shi et al. 29 address the problem of high-precision attitude control for quadrotor, in which the enhanced ESO is constructed based on the super-twisting algorithm to estimate and attenuate the impact of wind gust and actuator faults in finite time. From recent lecture of the quadrotor control with ESO, ESO is always conducted to estimate the disturbance of quadrotor system and first derivative of state. However, the convergence characteristics of ESO is rarely considered in this research.
Besides including the existing robust trajectory tracking problem of quadrotor system, most of them are designed based on the assumption that the four motors have zero time delay, but in fact, it is not established. In real applications, the parameters of motor are designed to satisfy the requirement of control system. Once motor dynamic cannot meet the requirement, the control system should be redesigned which increases the design cycle and improves the difficulty of quadrotor control design.
In this article, taking the motor dynamics into consideration, a robust fixed time controller with motor dynamic (MDRFTC) is proposed for tracking trajectory problem. Compared with most of the existing sliding mode control methods employed to control quadrotor, the main contribution of this article is summarized as follows:
A novel method to obtain the multiple differential of system state is presented which not only avoid the problem of “explosion of complexity” but also guarantees the fixed time convergence characteristic. And the method is used to obtain the first derivative and second derivative of the desired trajectory and the virtual control command.
Based on fixed time convergence control method and fixed time ESO, a novel robust fixed time trajectory tracking controller with motor dynamics is presented in this article. The proposed controller can avoid the adverse impact on the quadrotor system caused by the mismatch between the quadrotor controller and motor dynamics. Therefore, the proposed controller is significantly different from the existing control approaches, whose motor dynamics are not considered in the design procedure of quadrotor control.
The remainder of this article is organized as follows. The dynamic model of the quadrotor is presented in the second section. The third section describes the development of the robust fixed time controller with motor dynamics based on fixed time ESO and the stability analysis in detail. The simulation examples to demonstrate the validity of the proposed controller are carried out in the fourth section. Finally, conclusions are drawn at the end of this article in the fifth section.
Dynamic model of quadrotor
The typical quadrotor consists of four motors and the structure of quadrotor is shown in Figure 1. The mathematical of the quadrotor has been already addressed in the literature. 30 In this section, a brief description of the quadrotor is presented.

Structure of the quadrotor with body coordinate and the inertia frames.
To describe the space motion state of the quadrotor, the inertial frame
The translational dynamic subsystem can be expressed by the following equation

where m is the quadrotor mass.

The rotational dynamic subsystem can be expressed by the following equation

where
Motor of quadrotor has complex dynamic characteristics. For simplicity, the dynamics of motors can be described as a first order with dynamic uncertainty. Thus, the control torques

where τ is the time constant. Δ means dynamic uncertainty which is a smooth bounded disturbance.
For these expressions, the dynamics of the quadrotor can be written as follows
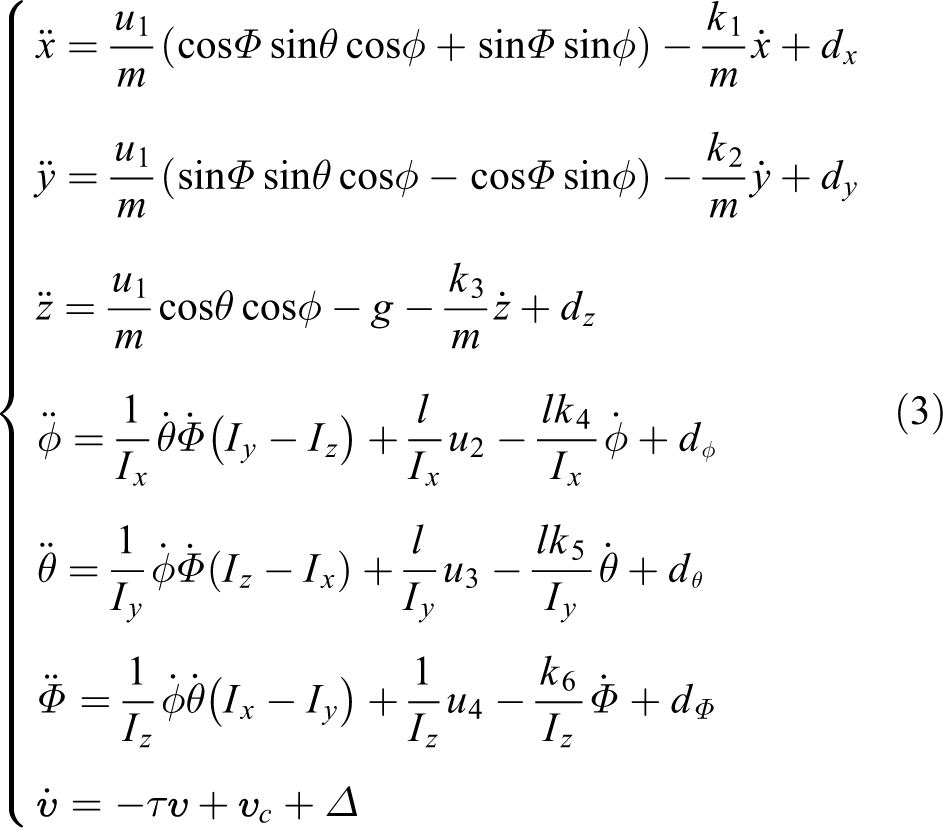
where
Assumption
The disturbance of quadrotor is continuous and differentiable.
Remark 1
The drag of quadrotor is related to the velocity and angular rate, also influenced by the air density and wind speed. Thus, it is difficult to obtain the accurate data of drag coefficient. In the designing process of quadrotor controller, the drag along with the external disturbance is regarded as system disturbance.
Remark 2
The dynamic of motor should meet with the requirement of quadrotor controller. However, failing to meet the controller requirement will improve the designing complexity of quadrotor controller. Considering the dynamic of motor can be obtained in advance, for increasing the efficiency of controller designing, the motor dynamic is regarded as the third subsystem in the quadrotor model after translational dynamic subsystem and rotational dynamic subsystem. Otherwise, to simplify the control system design and be in line with the actual situation, the motor is regarded as the first-order dynamic with dynamic uncertainty.
Robust fixed time controller with motor dynamics and stability analysis of quadrotor system
Preliminaries
To facilitate the quadrotor controller design, several definitions, preliminaries, and theorems are introduced in advance.
Definition 1
Considering the system of differential equations 31

where x is the vector of system states,
Lemma 1 32
Consider a scalar dynamic system 32

where

Lemma 2
For the nonlinear system 33,34

where y is the system output, f is the system function, and

where e is a natural number, η and b are constant number. The exponents
Theorem 1
For a function

The fixed time ESO guarantees
Proof
First of all, the system is established as follows

where
Structure of the quadrotor control
In this section, the goal of the proposed control is to track the desired trajectory
The quadrotor system is divided into two parts: position subsystem and attitude subsystem. The position subsystem contains altitude controller and position controller. And the attitude subsystem which highly coupled with the position subsystem consists of the yaw controller and the attitude controller. The position subsystem with slow dynamics is to track the reference trajectories via adjusting the force and moment of attitude subsystem and track the desired attitude generated by the position subsystem. Meanwhile, the motor dynamics of quadrotor are considered in each controller, and the dynamic disturbance of motor is compensated by fixed time control method with robustness in itself. The fixed-time ESO is adopted to estimate the unmodeled error and external disturbance online in the two subsystems. Then, eliminating the problem of explosion of complexity and estimating the unmeasurable velocity and acceleration velocity of state, an estimation method is constructed based on fixed time ESO. The control structure of the robust fixed time convergence trajectory tracking control is illustrated in Figure 2.

Block diagram of the control structure.
Controller design for quadrotor and stability analysis
In this section, the main procedures of the robust fixed time controller with actuator dynamics are presented for addressing the trajectory tracking control problem of the quadrotor in the presence of composite disturbances and motor dynamics.
Virtual control of position
The position control stabilizes the altitude of quadrotor and generates the desired pitch and roll angle for the attitude loop.
Step 1. Design of altitude controller with motor dynamic
To perform the altitude control, the sliding mode manifold is given as follows

where

where

where k
1 and
Theorem 2
Let the control (12) be applied to the altitude system, and the parameters of control (12) satisfy
Proof
To prove the stability of the system, define

At this moment, substitute the virtual control

where

Then, refer to Lemma 2, the stability of altitude is guaranteed and the tracking error is able to converge to zero in fixed time and the settling time is shown as follows

which is independent of the initial state of system.
Step 2. Design of position controller
First, define


Then similar design procedures are conducted to design control law for the attitude loop to generate the desired pitch and roll angle, two sliding manifolds are defined as

where k
2 and k
3 are positive constants.
Theorem 3
With the control (17) and the parameters of the controller satisfy
Proof
Define

With the control (17), we can obtain

where

where

From equations (12) and (15) to (17), the reference roll angle and pitch angle are obtained as

Attitude control
To develop the controller for the attitude subsystem to track the desired yaw angle and the roll, pitch angle generated by position loop, the design procedures of yaw controller and attitude controller are introduced.
The attitude subsystem contains yaw controller and attitude controller. Define the tracking error between the actual and the desired attitudes as follows

where
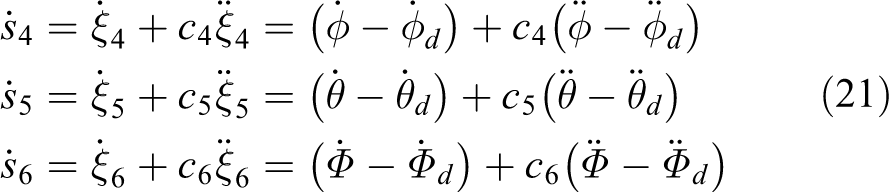
where
where
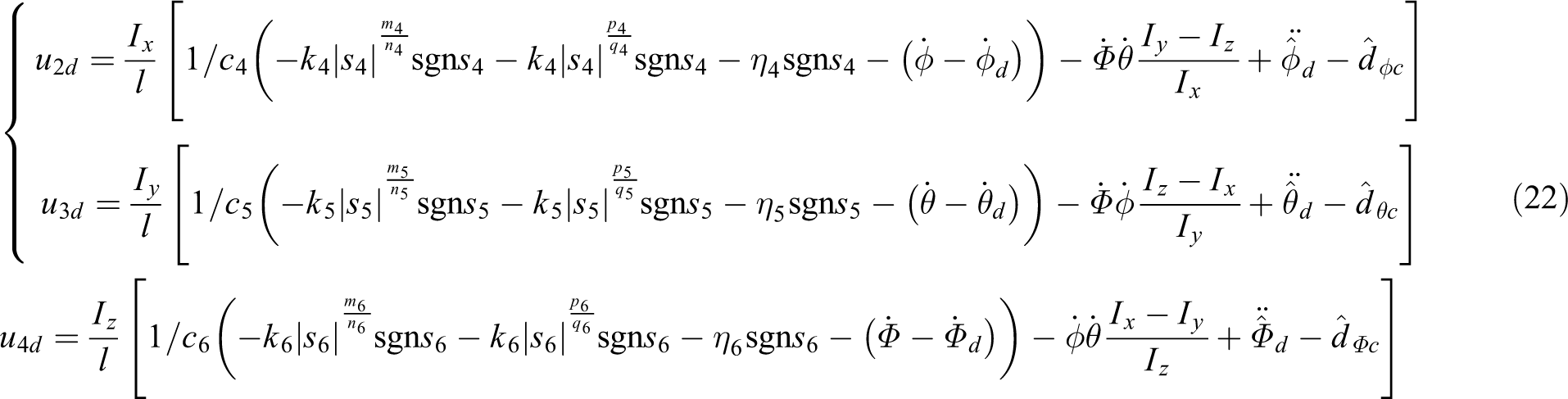
Theorem 4
Consider the attitude subsystem, for the given desired attitude angle, the control laws of yaw controller and attitude controller shown in equation (22) can guarantee the robustness of the subsystem and make the tracking errors converge to zero in fixed time, with
Proof
To prove the stability of yaw controller and attitude controller, define the Lyapunov function as
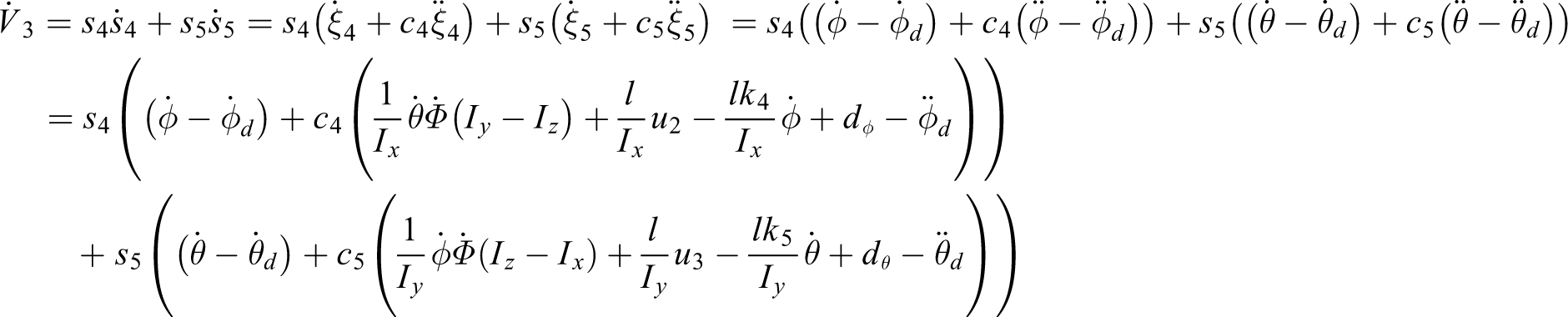

With the control law (21)


If there exist
Then refer to Lemma 2, the attitude of system can track the desired attitude and yaw angle in fixed time with robust and precision. The settling time is shown as follows

Quadrotor control with motor dynamics
To eliminate influence to the system (4) caused by motor dynamics, a new sliding mode manifold is given as

where

where

where ku
and
Theorem 5
Considering the actual control command (25) and quadrotor system (1), the actual control command is able to track the virtual control command with robust and high rapidity.
Proof
To prove the stability of the motor dynamic system, the Lyapunov function is defined as

with the control law (25) and

Then refer to Lemma 2, the stability, robust, and convergence characteristics of the motor dynamic system can be proved and the settling time is shown as

From the above equation, the settling time only relies on the controller parameters.
Remark 1
In this article, the complex motor dynamic is expressed as first-order dynamic with dynamic disturbance. Therefore, to a great extent, the dynamic disturbance does not satisfy the assumption of fixed time ESO. Considering the boundedness of the disturbance, sign function is adopted to the robustness of guarantee quadrotor system.
Remark 2
In engineering applications, the parameters of motor are designed by the physical environment which determine the dynamics of motor. And the control method of the system is devised at the same time. Then, the ultima control system is confirmed by the joint simulation of the control method and the motor. However, the motor dynamics always are not considered in the designing process of control method, which may enhance the difficulty and lead to repeatedly of control method designing. In this article, to avoid the influence to the quadrotor caused by the motor, the dynamic is considered in the design procedures of control system. That can guarantee the stability, robust, and convergence characteristic of the quadrotor system. Meanwhile, the control method is reduced to decrease the controller design difficulty and can give much instructional value to the project.
Simulation
To validate the efficiency and superiority of the proposed controller of quadrotor in high tracking precision and high stability, several simulations were introduced in this section. And in the second simulation, the proposed method is compared with the fixed time tracking controller without considering the actuator dynamics which have different time constants. The parameter value of the quadrotor in this study is listed in Table 1.
Parameter values of the quadrotor.

Tracking desired trajectory with motor dynamics
In this section, a desired trajectory problem is illustrated to test the performance of the proposed method control. The desired trajectory is defined as follows

Both the unmodeled dynamics and the external disturbances considered in this work is included to show the robustness and convergence properties of the proposed control strategies. The coefficient of unmodeled dynamics and the external disturbances are defined as follows

Furthermore, the dynamic of motor is introduced to demonstrate the effectiveness of the control method proposed in this work, and the model of motor is considered as first-order dynamic with dynamic disturbance. The dynamic disturbance is shown as
The initial conditions of the quadrotor are set to be
The simulation results are shown through Figures 3 to 9. Figure 3 shows the quadrotor tracking the desired trajectory in the way of the proposed control method. As shown in Figure 3, considering motor dynamics, MDRFTC are able to drive the quadrotor to follow the reference position and yaw under unmodeled disturbances and periodical time-varying external disturbances with rapidly and accurately by the control commands as shown in Figure 7. The robustness of MDRFTC is due to the fixed time ESO which is proposed to estimate the unmodeled disturbances and external disturbances. And it is obvious that the disturbances estimation of translational dynamic subsystem and rotational dynamic subsystem can approximate the real disturbances as shown in Figures 8 and 9. The roll angle and pitch angle are shown in Figure 4. Figures 5 and 6 represent the curves of velocity and angular rate, respectively.

Tracking curve of desired trajectory.

Tracking curve of roll and pitch angle.

Curve of velocity.

Curve of angular rate.

Control command.

Disturbance estimation of position subsystem.

Disturbance estimation of attitude subsystem.
Tracking trajectory with and without considering motor dynamics
In this section, the comparison of MDRFTC with the control command (12) and (22) names robust fixed time controll without considering motor dynamics is conducted to verify the efficiency of the proposed control method. Two scenarios are conducted with different motor time constants of system (3) which are set to be 10 and 20 ms, respectively. The unmodeled disturbances, external disturbances, and initial conditions of the quadrotor are set as “Tracking desired trajectory with motor dynamics” section.
The simulation results for 10 ms time constant of motor dynamic are shown through Figures 10 to 14, and for 20 ms time constant of motor dynamic are shown through Figures 15 and 16. Figure 10 shows that the two control methods are able to drive the quadrotor to follow the reference under motor dynamics with 10 ms time constant. However, the control method considering motor dynamic has high precision in tracking desired trajectory. Conversely, without considering motor dynamics, the tracking errors are not sufficiently smooth because of the delay and oscillation of control command caused by the dynamics of the motor. From the curve of the angle shown in Figure 11, the velocity shown in Figure 12, the angular rate shown in Figure 13, and the control command shown in Figure 14, the control method without motor dynamics has higher steady-state errors than MDRFTC.

Tracking curve of desired trajectory with 10 ms time constant of motor dynamic.

Tracking curve of roll and pitch angle with 10 ms time constant of motor dynamic.

Curve of velocity with 10 ms time constant of motor dynamic.

Curve of angular rate with 10 ms time constant of motor dynamic.

Control command with 10 ms time constant of motor dynamic.

Tracking curve of desired trajectory with 20 ms time constant of motor dynamic.

Control command with 20 ms time constant of motor dynamic.
As in the 10 ms time constant of dynamic, the control method can drive the quadrotor to track the trajectory. The system entirely lost its stability with 20 ms time constant in 4.2 s as clearly shown in Figure 15. However, MDRFTC achieves a faster convergence rate and higher tracking precision in the different time constant of motor dynamics which reduce the degree of difficulty of motor designing and controller designing.
Conclusion
The robust fixed time convergence trajectory tracking problem for the quadrotor with unmodeled disturbance and external disturbance as well as considering the motor dynamics was investigated in this study. For the engineering practice and simplify, the motor dynamics are set to be first-order dynamic with dynamic disturbance. And the fixed time ESO was utilized to estimate the first and second derivatives of system statement and virtual control command which eliminate the problem of explosion of complexity. Also the fixed time ESO was proposed to estimate the composite disturbances to guarantee the robustness and precision of control method. The stability of the system is verified in accordance with Lyapunov stability theory. At last, several simulation results showed that the proposed control method is able to track the desired trajectory quickly and accurately under the composite disturbances and the different time constant of motor dynamics.
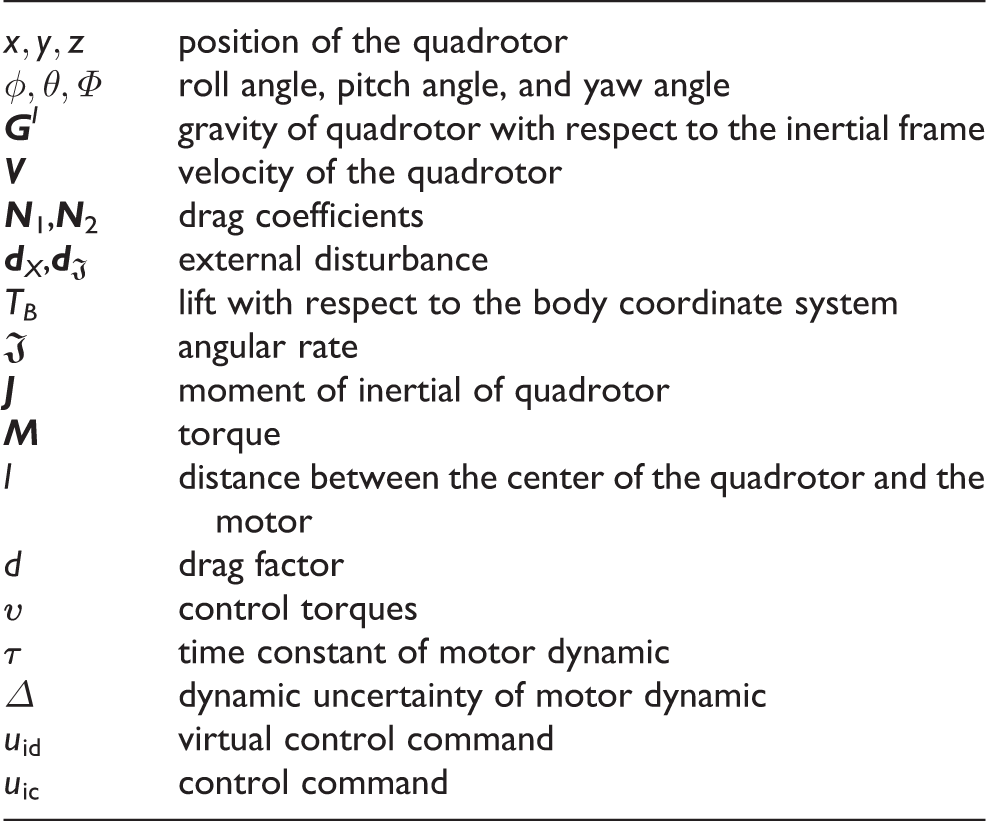
Nomenclature
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Hubei Provincial Natural Science Foundation [grant no. 2018CFB276] and the Research Project of Hubei Provincial Department of Education [grant no. Q20181403].