
Abstract
To solve the problem that it is difficult to track the desired control target of a heavy load train accurately under the input saturation constraint, an anti-windup compensated terminal sliding mode control algorithm for a heavy load train is proposed in this work. First, based on an analysis of the train coupling force and an uncertain disturbance force, a multi-particle dynamic model of a single train is established. Second, an improved unbounded anti-windup compensator is designed and the saturation deviation correction method is used to cause the compensation factor to converge to zero, which means that the compensation factor limit problem that occurs in traditional anti-saturation compensators is eliminated. Then, in combination with the terminal sliding mode control algorithm, an unbounded anti-windup terminal sliding mode controller is constructed. This control method attenuates the effect of input saturation on the tracking accuracy for each locomotive; at the same time, the stability of the closed-loop system is verified based on Lyapunov stability theory. Finally, the effectiveness of the proposed algorithm in terms of its tracking accuracy and anti-saturation performance is verified experimentally.
Keywords
Introduction
As a result of the rapid development of train systems, ensuring the safety of train operations has become an urgent priority. 1 Among the problems to be solved, the saturation constraint is a common problem in train operation control systems, and the problem of actuator saturation in particular is one of the main problems hindering stable operation of heavy-haul trains.2,3 During actual operation of the train, the limitations of the train’s physical condition, e.g., the aging of its components and the power limit of the actuator, mean that the locomotive tractive force cannot reach its ideal value, and this leads to actuator saturation. If the input saturation problem during train operation is not considered, the control system overshoot will increase, the system’s response will become slower, and the system performance may even decline, causing the system to be unstable. 4 A suitable anti-windup compensator (AWC) has therefore been designed to operate in the controller and compensate promptly for deviations between the actual and ideal control inputs. This is essential for accurate tracking of the speed and displacement of heavy-haul trains when the input is constrained.
There are two main strategies for treatment of actuator saturation: the direct method and the indirect method. In the direct method, the input saturation constraint is considered directly during design of the control algorithm. Given that the input saturation phenomenon typically has a nonlinear characteristic, it is difficult to linearize it directly. 5 Chen et al. 6 constructed a sliding mode controller with input saturation for a quarter active suspension system with input saturation such that the output of the system could be tracked well and the performance requirements of the system were met. Yan et al. 7 proposed an anti-saturation adaptive fuzzy control scheme based on a high-order disturbance observer (HODO) and dynamic surface control (DSC) for nonlinear systems with saturated nonlinearity, uncertainty, and external interference problems that used the backstepping method in combination with DSC technology. The approaches of Chen 6 and Yan 7 both used direct methods to deal with input saturation constraints, which can reduce the difficulty of signal processing when input saturation occurs at a later stage. However, the design of the controller and the overall system design are both relatively complex, and the design cost is also high.8,9 Indirect methods do not need to consider the input constraint when designing the control algorithm but they can suppress input saturation by introducing an AWC. This method is both simple and effective. Many researchers have conducted effective research into indirect methods to deal with input saturation problems. Bui et al. 10 proposed a robust controller with a fixed structure and guaranteed low-order robustness performance that was combined with an AWC to suppress saturation. Lv et al. 11 proposed a fully distributed adaptive AWC algorithm to solve the consistency problems of linear multi-agent systems (MASs) with input saturation under directed interaction graph conditions. A novel anti-saturation proportional-integral-derivative (PID) compensation scheme was also proposed in the literature12,13 to suppress the saturation problem. References [10–13] all introduced types of AWC-modified control systems to compensate for the deviations caused by input saturation and thus provided effective control methods.14,15 Although the AWCs designed in the literature above caused the compensation factor to converge to the required bounded neighborhood, it is difficult to cause the factor to converge to zero.
With the aim of performing an in-depth study of heavy-duty trains, Wu et al. 16 used a parallel calculation scheme to establish a detailed fluid dynamics model of an air brake system for heavy-duty trains; this method greatly improved the calculation speed of the model. Wu et al. 17 analyzed two typical locomotive derailment accidents involving heavy-haul trains that occurred on tangent tracks. As a result, a method to determine the angle of the cutter position coupler was derived. Wu et al. 18 also conducted a comprehensive systematic review of emerging control technologies for use in railway virtual coupling (VC) research; this review surveys and categorizes the existing VC control technologies and elaborates on the distinct advantages of VC control technologies when compared with other control methods. The application of VC technology has significant implications for the advancement of heavy-haul trains. When the background requirement for accurate tracking of a heavy load train’s displacement relative to the desired target is considered, it is necessary to design a suitable tracking control algorithm. Traditional algorithms such as the PID control, fuzzy control, and optimal control algorithms are used widely in train target tracking applications. However, to replace these traditional control algorithms, sliding mode control (SMC) has been used in various fields because of the advantages of its fast response speed and strong anti-disturbance properties. 19 Zhang et al. 20 proposed an anti-saturation nonsingular fast terminal sliding mode-based cooperative tracking control strategy to solve the saturation problem in multiple motor modes. However, the traditional SMC algorithm makes it difficult to cause the state tracking error to converge to zero within a finite time; the terminal SMC (TSMC) method resolves this problem. 21 Dong et al. 22 constructed an improved sliding mode surface to ensure the global nonsingularity of the state and also proposed a nonsingular continuous TSMC method with buffeting reduction. Gao et al. 23 used neural networks to approximate the system uncertainties and proposed a fault-tolerant control method that combined fast TSMC (FTSMC) technology with neural networks (NNs).
Based on the considerations discussed above, an unbounded anti-windup terminal sliding mode controller (UAW-TSMC) is designed in this work. First, to solve the problem where it is difficult for a traditional AWC to cause the compensation factor to converge to zero, which leads to the limited anti-saturation performance of the AWC, a new unbounded anti-windup compensator (UAWC) is designed. Then, based on consideration of the target tracking problem of heavy-haul trains, the TSMC algorithm is proposed based on a single-train multi-particle power system. Finally, the UAW-TSMC is designed by using the UAWC to compensate for the deviation of the TSMC and avoid the actuator saturation that is caused by the physical structures of heavy trains. The proposed algorithm ensures that the target can be tracked accurately within a limited time, even if the heavy train has a saturated input.
Dynamic model description
During operation of a heavy train, the exterior of the train is subjected to basic resistance, additional resistance, and other forces. 24 In reference [25], a force analysis of the train coupling force and unknown interference was performed where the freight cars between the locomotives are ignored and each locomotive is regarded as a particle. A dynamic model of a single train with n locomotives as the traction power sources is thus designed as follows:



where
The running resistance of the train during its operation is determined as follows:

where

where
Note 2-1: During the train operation process, the unknown compound disturbance
Figure 1 shows a diagram of a heavy-haul train tracking control structure, where the solution used to ensure the stable and safe operation of the heavy-haul train involves tracking the control target through the function of the designed controller. Given the input saturation phenomenon that occurs in trains, it is necessary to ensure the stability of the designed anti-saturation compensator and to improve the anti-saturation regulation ability and the tracking accuracy of the train system. Therefore, this paper introduces the UAWC to address the input saturation problem of heavy-haul trains and designs the UAW-TSMC by combining the UAWC with the TSMC method to achieve target tracking: i.e., the controller input

Heavy-haul train control structure diagram.
When the heavy-haul train operation control algorithm is designed using the system given in equation (3), the control input

where
The specific input saturation characteristic curve for the heavy-haul train system is shown in Figure 2.
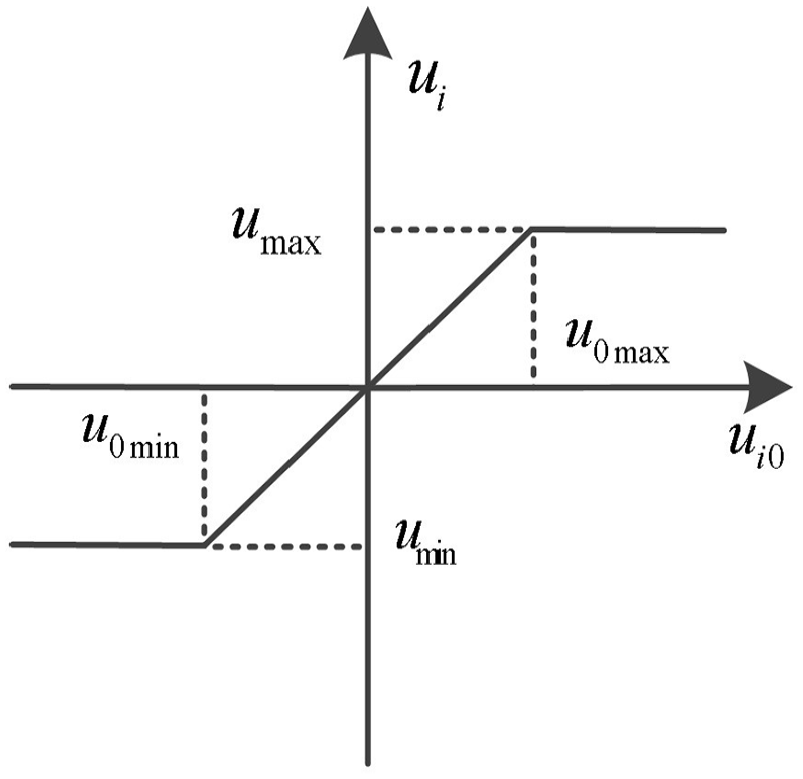
Input saturation characteristic curve.
UAWC design
Consider the input saturation situation shown in equation (4). When the output from the controller is inconsistent with the actual output from the actuator, the AWC is designed to compensate for the saturation error and then provide feedback to the controller system to ensure that the ideal control input is consistent with the actual control input.
Therefore, based on the traditional AWC, an improved anti-windup compensator, the UAWC, is proposed as follows:

where
Lemma 3.1:
26
For

is true.
Note 3-1: When the control input
Note 3-2:
To verify the stability of the designed UAWC, the Lyapunov function is defined as:

From equation (7):


When

When

The anti-saturation compensation factor

According to equation (12), the compensation factor
Note 3-4: Reference [27] gives the compensation factor stability equations (13) and (14) for the traditional anti-saturation compensator:


Based on Note 3-2, when combined with equation (14),

From Lemma 3-1, it can be concluded that the compensation factor is a semi-global uniform final bound, and the upper bound of the anti-saturation compensation factor is given by:

It is not easy to obtain the exact values or bound values of
UAW-TSMC design
When the effect of reducing the saturation of heavy trains with input saturation through use of the UAWC is considered, it is also necessary to design a controller to allow the train to track the control target accurately.
The sliding mode function is designed as follows:


where
Note 4-1: The time required for the fast terminal sliding mode of

The design of the UAW-TSMC is given by:

The actual controller equation is:

Theorem 4-1: The UAW-TSMC in equation (20) is designed for the heavy-haul train model of equation (3) under the action of the UAWC from equation (5) and combined with the TSMC. When the parameters

Then, take the derivative of equation (22) to give:



Because

Then, we substitute the UAW-TSMC of equation (20) into equation (26) to obtain:



If the parameters meet the conditions that

Certification complete.
It can be seen from the proof above that the asymptotic stability condition is satisfied. Therefore, under the action of the control rate of equation (20), the switching surface is reached and maintained within a finite time
Note 4-2: For the UAWC shown in equation (5), when
Note 4-3: Input saturation constraints for heavy-haul trains are acted on by
Simulation verification and result analysis
Simulation parameters
Because the power used during operation of heavy-haul trains is supplied by the locomotive(s) within these trains, Simulink was initially used to construct a heavy-haul train model composed of
Heavy-haul train parameters.

a3i, a2i, a1i: drag coefficients; bi: elastic coefficients; hi: damping coefficients.
The controller design parameter values are
Simulation results and analysis
Simulation comparison under saturated and unsaturated conditions
For a heavy load train without the input saturation control state, the effect of the actual controller on the train can be explained by the effect of each locomotive’s position and speed tracking target curves. Figure 3(a) and (b) show the 3D curves for the displacement and speed-tracking tracks of the heavy-haul trains, respectively. The curves show that each locomotive can track the targeted displacement and speed accurately.
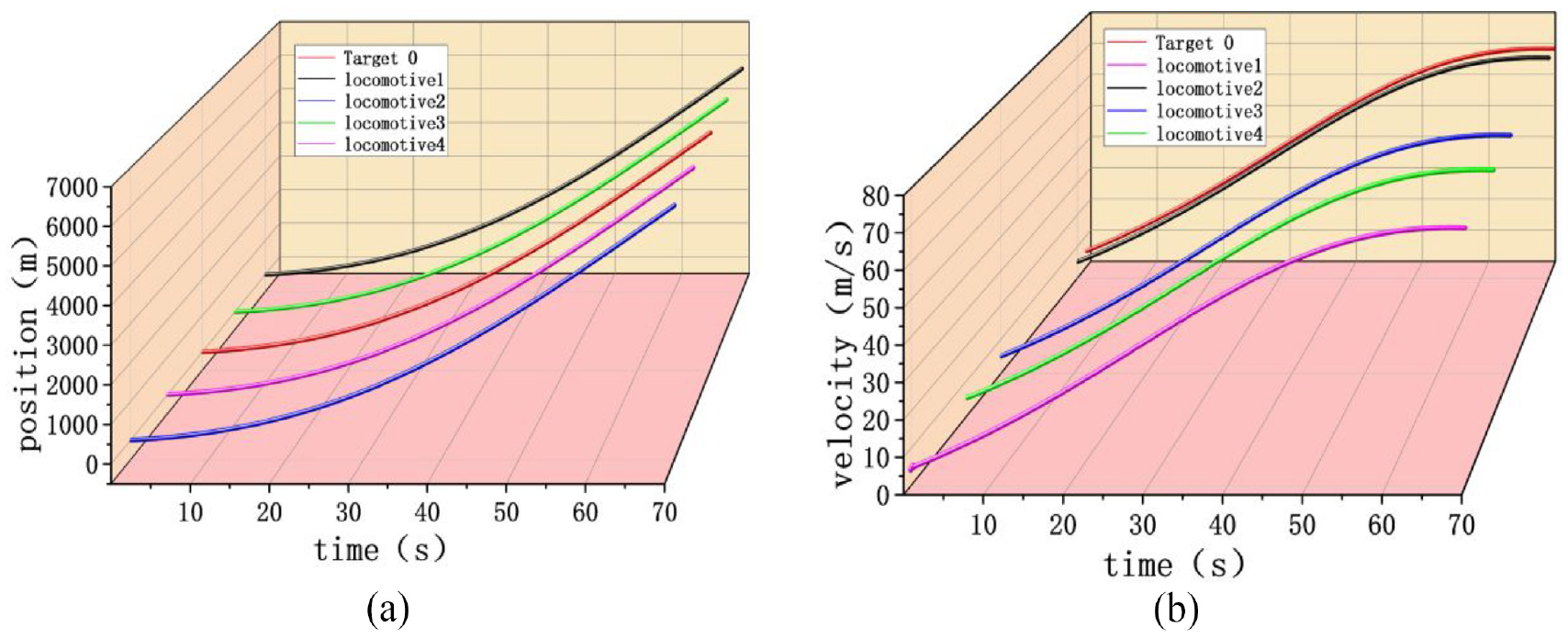
3D diagrams of the position and speed tracking trajectories: (a) Position tracking trajectory (b) Speed tracking trajectory.
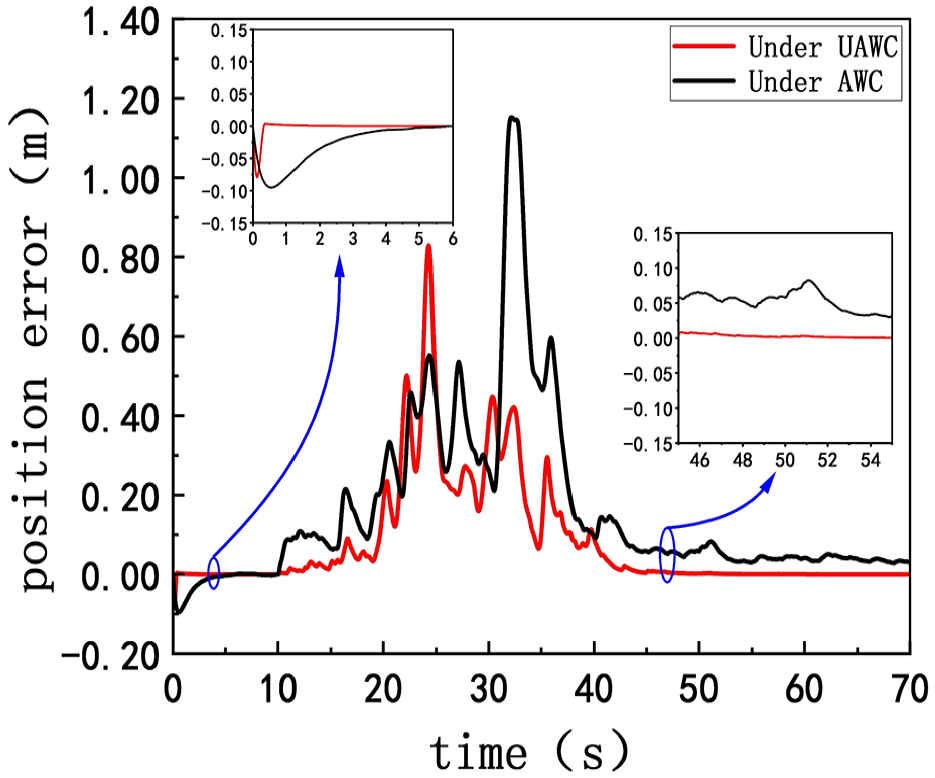
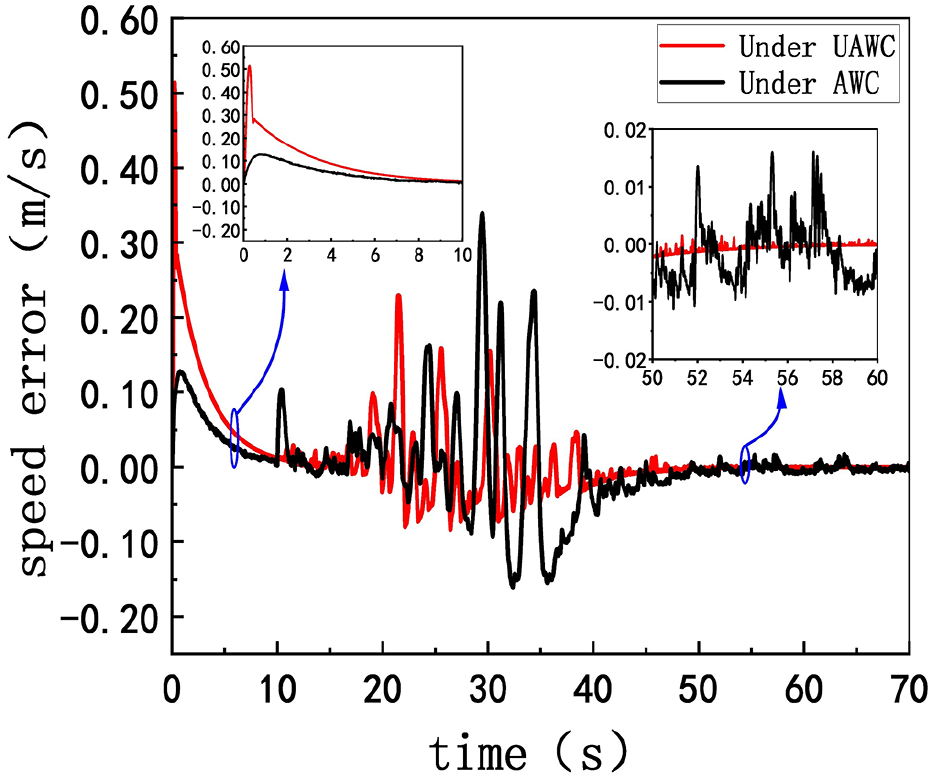
Figures 4 and 5 show the trajectory curves for the displacement tracking error and the velocity tracking error, respectively, in the cases when the input constraints are considered and when the input constraints are not considered. According to the tracking curve for the displacement tracking error in Figure 4, the initial tracking state converges to the stable tracking state at 0.5 s (input saturation) and 4 s (no input saturation), and the peak displacement errors caused by the addition of the disturbance for 10 s are 0.45 m and 0.02 m, respectively. After the disturbance disappears, the peak displacement errors become 0.01 m and 0.03 m, respectively. According to the tracking curves for the velocity tracking error in Figure 5, the peak velocity errors caused by the addition of the disturbance for 10 s are 0.2 m/s and 0.04 m/s, respectively. After the disturbance disappears, the peak velocity errors become 0.01 m/s and 0.05 m/s, respectively.

Position error trajectory curves.

Speed error trajectory curves.
Figure 6 shows the actual control input track curve for a heavy-haul train. When the input saturation constraint is considered, the actual control input torque of the train always lies within the constraint range, except for the period where the input saturation occurs for some time after 10 s when the saturation disturbance was added. Whenever the controller input crosses the set upper and lower bounds, the UAWC will then act to suppress the influence of the input saturation and achieve fast-tracking of the target curve for each locomotive’s displacement and speed. At the same time, the interference that occurs during the tracking convergence process is suppressed well, which gives a further indication that the designed UAW-TSMC plays an effective anti-saturation role.

Actual control input trajectory curves.
The combination of the curves in Figures 4 to 6 shows that when the system is constrained by input saturation, the system’s tracking performance is affected to some extent, but the impact of the input saturation is limited and short-lived. When the control input is not saturated, the speed and displacement tracking under the action of the UAW-TSMC can provide a more accurate tracking effect. If the input saturation is not considered, then an unrestricted control input may cause the traction force (or the braking force) of the train to exceed the maximum adhesion between the wheel and the rail when encountering bad track conditions and the effects of the external environment, which may lead to idling (or sliding) of the wheel and cause irregular buffering during train operation.
Simulation comparison between the UAWC and the AWC under saturated conditions
To illustrate the superiority of the anti-saturation TSMC algorithm constructed using the designed UAWC, the traditional AWC 27 structure is used to construct the anti-saturation SMC algorithm using the method designed in this paper, and then a simulation experiment is performed for comparison with the designed UAW-TSMC. The same dynamic model and controller parameters of the heavy-haul train are used in all cases.
As the comparison of the compensation factor limits in Figure 7 shows, the traditional AWC compensation factor limit is 0.16, but the UAWC compensation factor can converge to zero, thus eliminating the compensation factor error and verifying the validity of the proposed theory.

Comparison of the UAWC and AWC compensation factor limits.
Figure 8 illustrates that, when compared with the traditional AWC combined controller, the UAW-TSMC can limit the control input to the 890 KN limit range more rapidly when the saturation constraint occurs at 10 s. In addition, under the influence of the UAW-TSMC, the control input of the locomotive only approaches the saturation limit within a short time range. The ideal control input is always maintained within the bounds of the actual control input. Therefore, the UAWC solves the input saturation problem effectively and exhibits a superior anti-saturation performance when compared with that of the traditional AWC.

Control input curve comparison between the UAWC and the AWC.
As shown in the diagram comparing the displacement error curves of the UAWC and the traditional AWC structure when input saturation is considered in Figure 9, their initial tracking states convert into stable tracking states at 0.5 s and 3.5 s, respectively, and the peak displacement errors caused by adding the disturbance at 10 s are 0.8 m and 1.15 m, respectively. After the disturbance continues for some time, the displacement errors under the action of the UAWC can converge more rapidly, and the convergence errors and jitter are also smaller.
Displacement error curve comparison between the UAWC and the AWC.
As the comparison of the velocity error curves in Figure 10 shows, the peak velocity errors caused by addition of the disturbance at 10 s are 0.24 m/s and 0.35 m/s for the UAWC and the AWC, respectively. After the disturbance, the velocity errors under the action of the UAWC converge more rapidly and are smaller, and no jitter occurs. Therefore, the combined results from Figures 9 and 10 show that the designed UAW-TSMC can deal with the instability caused by input saturation more rapidly than the traditional system, i.e., it provides a better anti-saturation performance. At the same time, the tracking control precision has also been improved.
Speed error curve comparison between the UAWC and the AWC.
Experimental results and analysis
To provide further verification of the effectiveness of the UAW-TSMC designed in this paper, the RT-LAB semi-physical simulation platform, which is composed of a digital signal processor (DSP) controller, an OP5600 simulator, and the upper unit as shown in Figure 11, is used to perform experiments, in which the parameters used in the RT-LAB semi-physical simulation are consistent with those used in the MATLAB simulation. Because this paper mainly reflects the superiority of the designed UAWC when compared with the AWC, it is necessary to conduct semi-physical experiments to compare the displacement error and speed error characteristics of the train under the action of these two compensators.

RT-LAB semi-physical simulation platform.
Figure 12(a) compares the experimental waveforms for the train displacement error under the action of the UAWC and the AWC. The results show that the peak displacement errors caused by addition of the saturation disturbance for 10 s are 1.12 m and 1.45 m, respectively. After the saturation disappears, the displacement error under the UAWC converges more rapidly, and both the convergence error and the jitter are smaller. Figure 12(b) compares the experimental waveforms for the train speed error under the action of the UAWC and the AWC. The results show that the peak velocity errors caused by input saturation at 10 s are 0.19 m/s and 0.22 m/s, respectively. After the saturation disappears, the convergence is faster and the error is smaller under the action of the UAWC, and there is no jitter. As Figure 12(a) and (b) show, the experimental results are consistent with the simulation results.
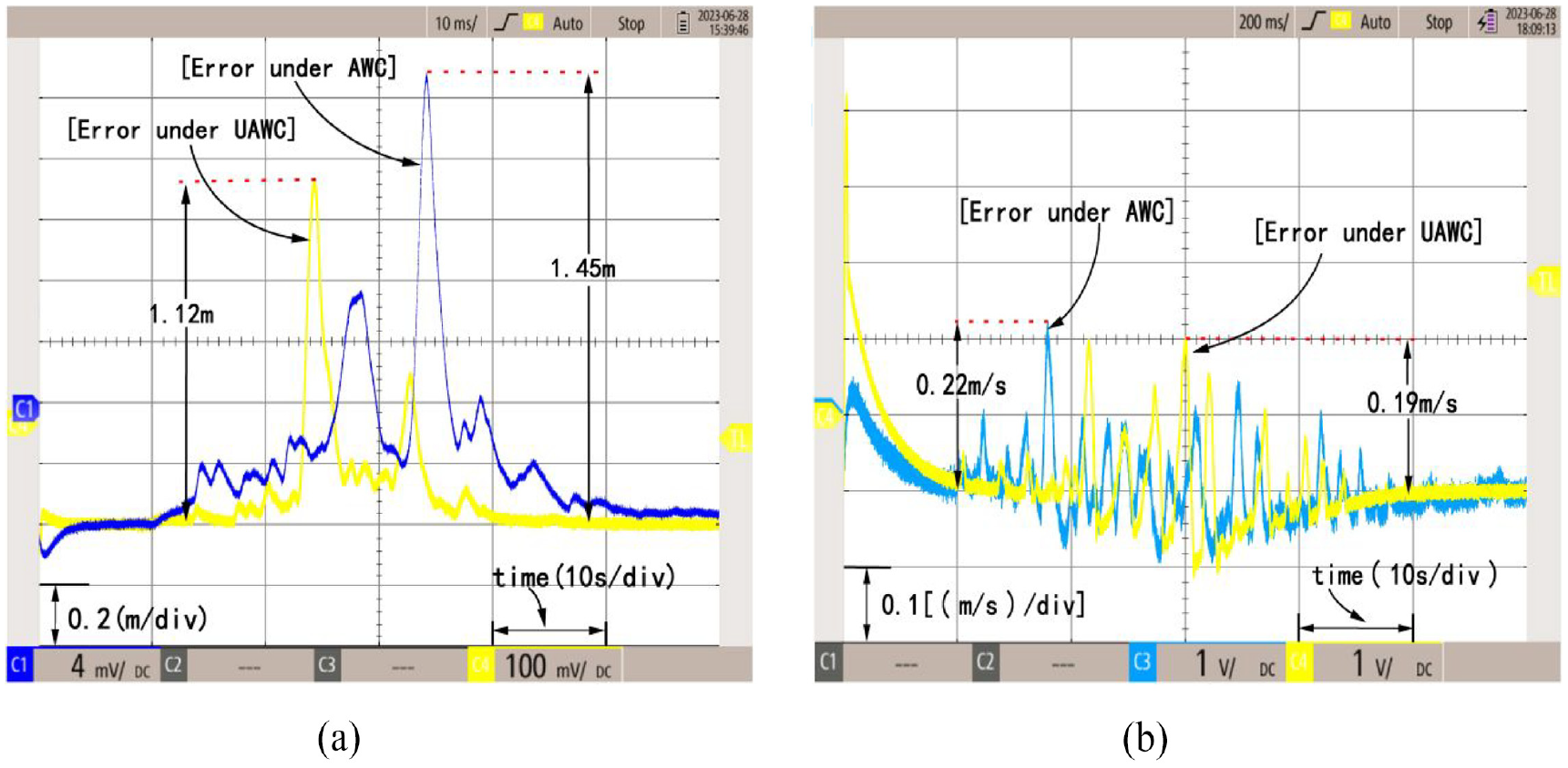
Error waveform comparison between the UAWC and the AWC: (a) Experimental waveforms for the displacement error under the action of the UAWC and the AWC, (b) Experimental waveforms for the velocity error under the action of the UAWC and the AWC.
Conclusion
In a traditional AWC, it is difficult to cause the compensation factor to converge to zero, which leads to a limited compensation performance, and it is also difficult to realize the optimal anti-saturation performance of the compensator. A UAWC algorithm is proposed in this work that uses the principle of input saturation error amplification to compensate for the saturation difference and suppress the input saturation. When compared with the traditional AWC, the UAWC not only eliminates the compensation factor limit, but also improves the compensation performance, and also demonstrates a better anti-saturation capability.
To ensure fast tracking of the control target by each locomotive in a heavy-haul train, a TSMC algorithm that is suitable for use in the train system is proposed. Simultaneously, the UAWC provides feedback to the TSMC for anti-saturation compensation, and the UAWC-based UAW-TSMC algorithm is developed. This algorithm has been implemented successfully in a train control system. When compared with traditional control algorithms, the proposed algorithm enhances the tracking accuracy and speed of the locomotive with respect to the target value while also effectively reducing the jitter phenomenon for the heavy train during operation. Furthermore, the algorithm contributes substantially to input saturation mitigation. The feasibility and effectiveness of the proposed control law are verified using a combination of theoretical derivation and experimental analysis.
When the complex environment faced by heavy-haul trains is considered, the vibration that occurs in the freight cars is inevitable. In the existing literature, consideration of the vibration characteristics of nonpowered carriages in heavy-haul trains without an anti-saturation compensation system remains an active and challenging research topic. Based on the results of this study, our future research direction will consider the influence of the vibrations of each freight car on the entire heavy-haul train under the saturation constraint.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: National Natural Science Foundation of China (62173137, 52172403) and Project of Hunan Provincial Department of Education (23A0426).