
Abstract
To address the tracking control problem of heavy-haul trains (HHTs) with input saturation during operation, an anti-saturation sliding mode (SMES) control method based on dynamic auxiliary compensator (DAC) is presented. Firstly, an HHT model with nonlinear coupling and uncertain disturbances is built. Secondly, a new type of DAC is introduced to overcome the difficulty of traditional dynamic auxiliary compensator (TDAC) with a large upper bound on the compensation signal. Finally, an anti-saturation SMES control algorithm is designed to reduce the influence of input saturation on the tracking accuracy of each carriage. Simulation results verify the effectiveness of the algorithm in terms of tracking accuracy, anti-interference, and anti-saturation.
Introduction
During actual operation, HHTs are restricted by Automatic Train Protection (ATP) System due to various operating conditions (e.g. road sections and environments). This results in train speed restrictions.1–3 In addition, the output of controller does not match that of actuator, causing input saturation.4–6 Therefore, improving the tracking accuracy of HHTs under the influence of input saturation has become a popular research topic amongst many scholars.7,8
The last few decades have witnessed progress in the development of anti-saturation tracking control technology for HHTs.9,10 Saturation error is traditionally treated as a system disturbance to obtain a good control effect, However, the real-time tracking performance is different from the expected effect.11,12 Therefore, in order to ensure that the faults caused by input saturation are quickly and effectively suppressed during train operation. 13 We need to consider two control objectives. First, an auxiliary system is designed to ensure the stability of train system and improve its dynamic adjustment capability. 14 Second, a designed anti-saturation controller improves the tracking accuracy of the train while ensuring the stable operation. 15 The introduction of dynamic and static auxiliary compensator compensates the deviation caused by input saturation, and becomes an effective control strategy. 16
However, due to the complexity of the train operation, the static auxiliary compensator is slightly insufficient in the performance of dynamic adjustment. 17 Ji et al. 18 presented an adaptive iterative learning control strategy, which compensated for the nonlinear effects brought by input saturation and solved the problem of time-varying time lag in high-speed train operation. Li et al. 19 designed an anti-saturation controller based on a static auxiliary compensator to realise the problem of multi-car and multi-train input saturation separately. Lin et al. 20 responded to high-speed trains with input saturation, the control algorithm of adaptive neural network can tracked the error in a bounded range. A static auxiliary compensator that satisfies the effect of system tracking control is adopted for saturation error compensation in above method.21,22 However, the static auxiliary compensator does not consider internal state variables. Thus, the adjustment range and the tracking accuracy have certain limitations.
To simultaneously stabilise the HHTs system and its state during operation, DAC effectively compensates for the deficiency of static auxiliary compensator by considering internal variables. Zhao et al. 23 studied a semi-active suspension system with input saturation. An adaptive neural network control is designed by introducing a dynamic auxiliary system to reduce the impact of saturation on the car body vibration. He et al. 24 studied the input saturation problem of a robot manipulator, and designed an adaptive neural controller by combining a dynamic assistance system to make position error converge to a bounded domain. Under the influence of input-constrained faults. Bai et al. 25 used the influence of input-constrained faults, uses input and output observations to design a fault filter controller to suppress the effects of residual interference. Although the above researches improve the tracking accuracy, the upper bound of the DAC compensation signal is extremely large.26,27 Consequently, the high precision requirements in practical applications are difficult to satisfy in practical applications.
This paper introduces a DAC to address the input saturation problem for HHTs. An anti-saturation SMES controller is designed by combining an improved DAC with the SMES control algorithm to ensure the stable operation of HHTs. Compared with the existing results, the steady-state tracking error is reduced whilst ensuring that the tracking error converges to a bounded domain. Moreover, the validity of a DAC compensation signal limit is proven, and the improved design method is practical in engineering. The major contribution are summarized as follows:
(1) In this paper, on the basis of proving the limit stability of the DAC, the problem of large upper bound of the compensation signal is effectively solved.
(2) A new anti-saturation sliding mode controller is presented to improve the anti-interference and tracking accuracy of the train system.
The rest of the paper is organized as follows. In section “Dynamic model description,” derived dynamic model of HHTs. In section “Design and stability analysis of anti-saturation SMES controller,” anti-saturation SMES controller based on DAC are developed and analyzed. Simulations are carried out to validate the performances of the designed controller in section “Simulation results.” Finally, some main conclusions is given presented in section “Conclusion.”
Dynamic model description
During operation, HHTs receive various forces through a coupler system, including basic resistance, additional resistance and the coupler forces of adjacent carriages. 28 Therefore, on the basis of the analysis of train coupling and uncertain disturbance forces, a train dynamic model composed of n carriages is designed as follows 29



where

where
To meet the research needs, equation (2) is rewritten as

where




where
Remark 1. During the operation, the unknown compound disturbances
In the framework of the above train dynamics model, designing controller
Design and stability analysis of anti-saturation SMES controller
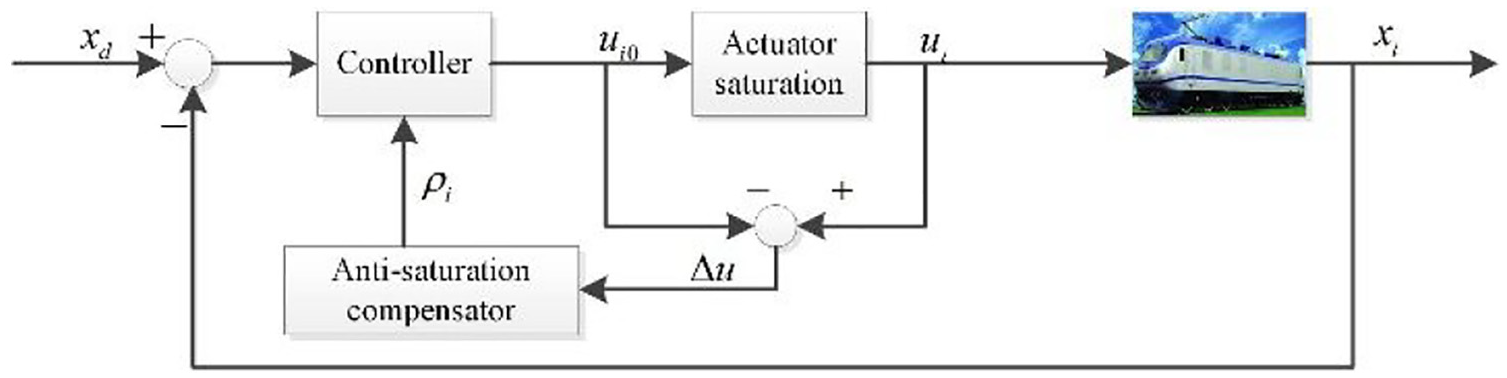
For an input saturation during the stable operation of HHTs, a DAC is designed to suppress the influence of the input saturation. Letting

where
Therefore, control input signal
where
Design of input saturation DAC
When considering the control state of input saturation, anti-saturation controller
where
Auxiliary compensation system.
Remark 2. In the actual stable operation of HHTs,
Lemma 1.31,32 Assume that


where
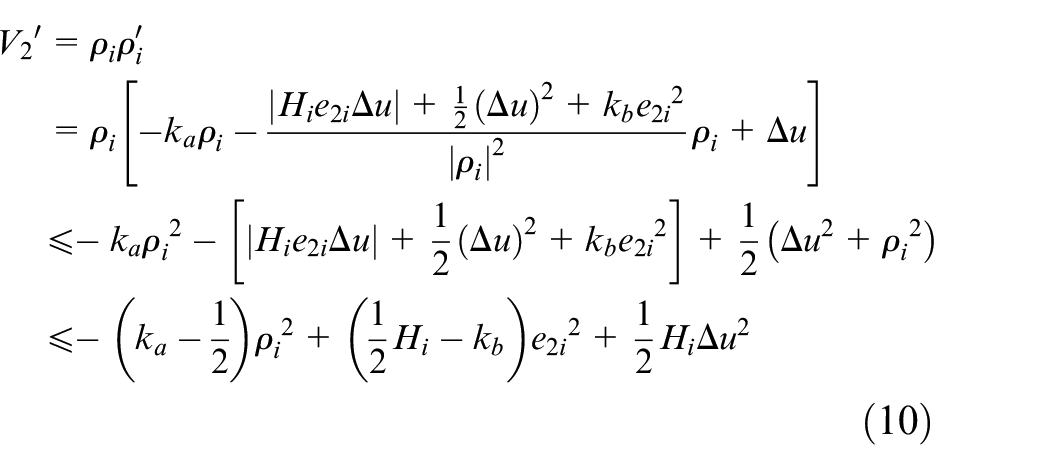
The stability analysis of the designed DAC is shown as follows.
A Lyapunov function is defined as follows

From (6), (11), and Lemma 2, we obtain a derivative as
When

Define

According to Lemma 1, the compensation signal is semi-globally consistent and finally bounded. The upper bound is

Therefore, the compensation signal
Remark 3. The literature
23
provides the compensation signal
Define unknown function

The upper bound is obtained by Lemma 1 as

The specific value or upper bound
Design of anti-saturation SMES controller
Considering the problem of input saturation during train operation, a SMES controller is designed to reduce the impact of saturation for ensuring the stable operation of trains. Displacement error is defined as follows35,36

where
The SMES function is designed as

where
The anti-saturation SMES controller is designed as

From equation (7), we conclude that when considering the saturation control state of inputs, the actual controller acting on the train system is

Theorem 1. For the HHTs Model (5), an actual SMES controller with input saturation (7) is designed. Given parameter settings
Proof. When

From the formula (6) and (11), we obtain a derivative as
From Lemma 2, we obtain



Equation (22) is written as
Select the design parameters
When
Equation (25) is written as

where
From Lemma 1, we infer that all signals are semi-globally consistent and finally bounded. Through equation (26), we derive

Equation (28) is reduced to

Similarly

Therefore, the system in the operation of HHTs has input saturation in tracking control, when
Remark 4. Equations (29) and (30) infer that
Remark 5. When
Remark 6. According to (8), (13), and (30), the upper bound of compensation signal change rate
Therefore, the DAC (8) is bounded and meets the engineering controllability requirement.
Simulation results
In this section, the effectiveness and feasibility of the designed anti-saturation control method are verified by a series of four-carriage train simulations. The parameters of the dynamic model of HHT operation are shown in Table 1.
Heavy-haul train parameters.
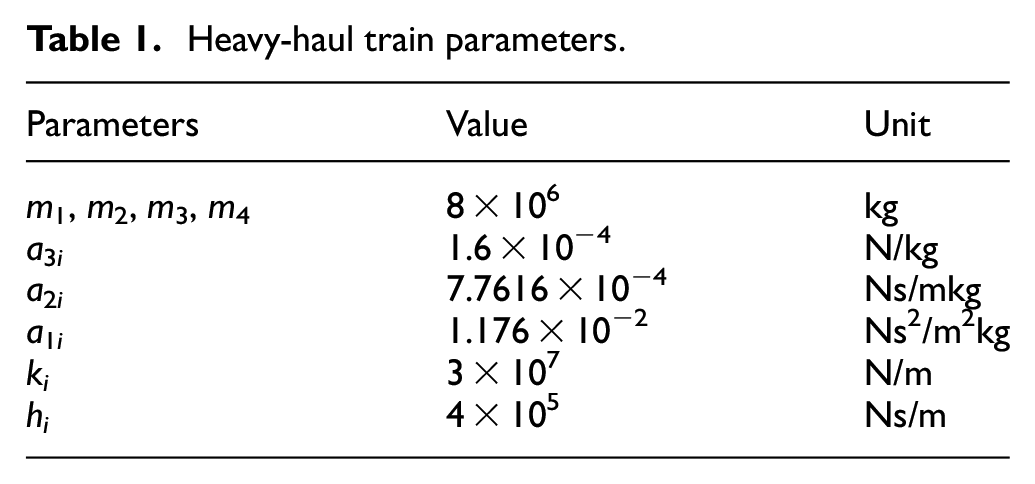
The parameter values designed in the running programme are
Simulation of input-free saturation tracking control
For HHTs without considering input saturation control state, the effect of the actual controller is explained by the tracking effect of the displacement and speed of each carriage. Figure 2 shows the 3D response curve of the speed and displacement of each carriage in the expected trajectory.
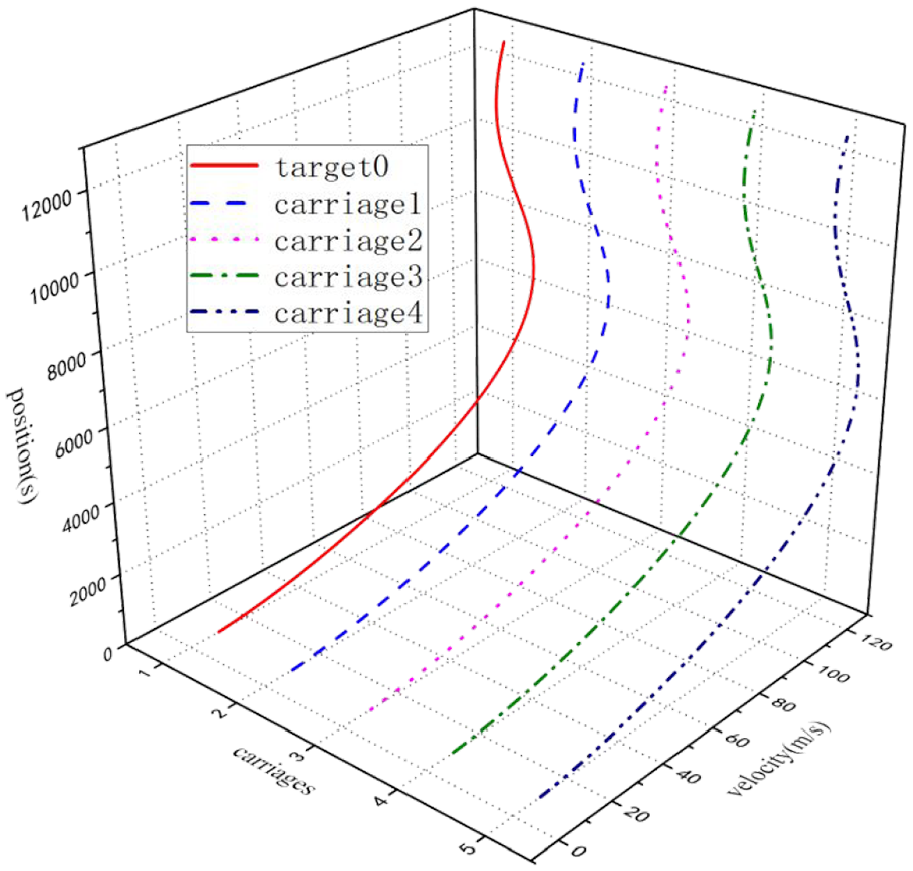
Velocity–displacement tracking diagram.
Figures 3 and 4 illustrate the error curve of the expected trajectory of each carriage in the train.
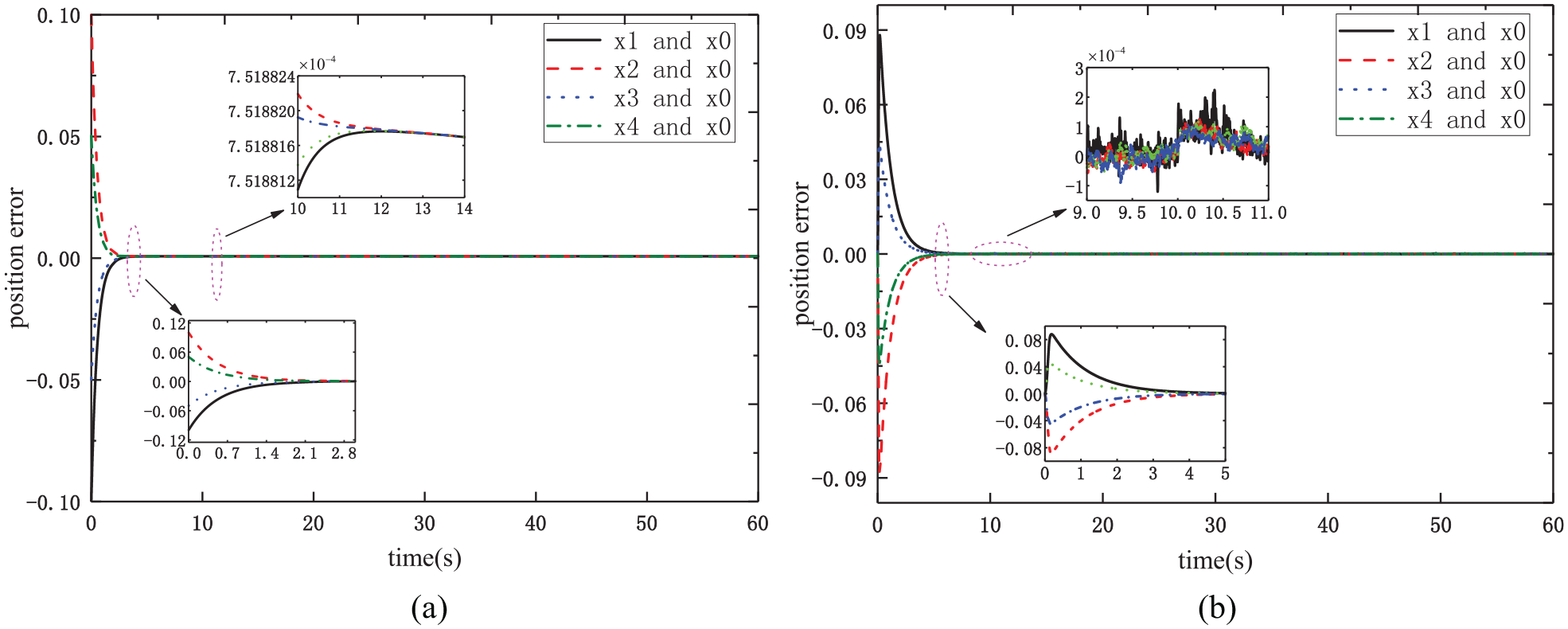
Multi-carriages displacement tracking error: (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
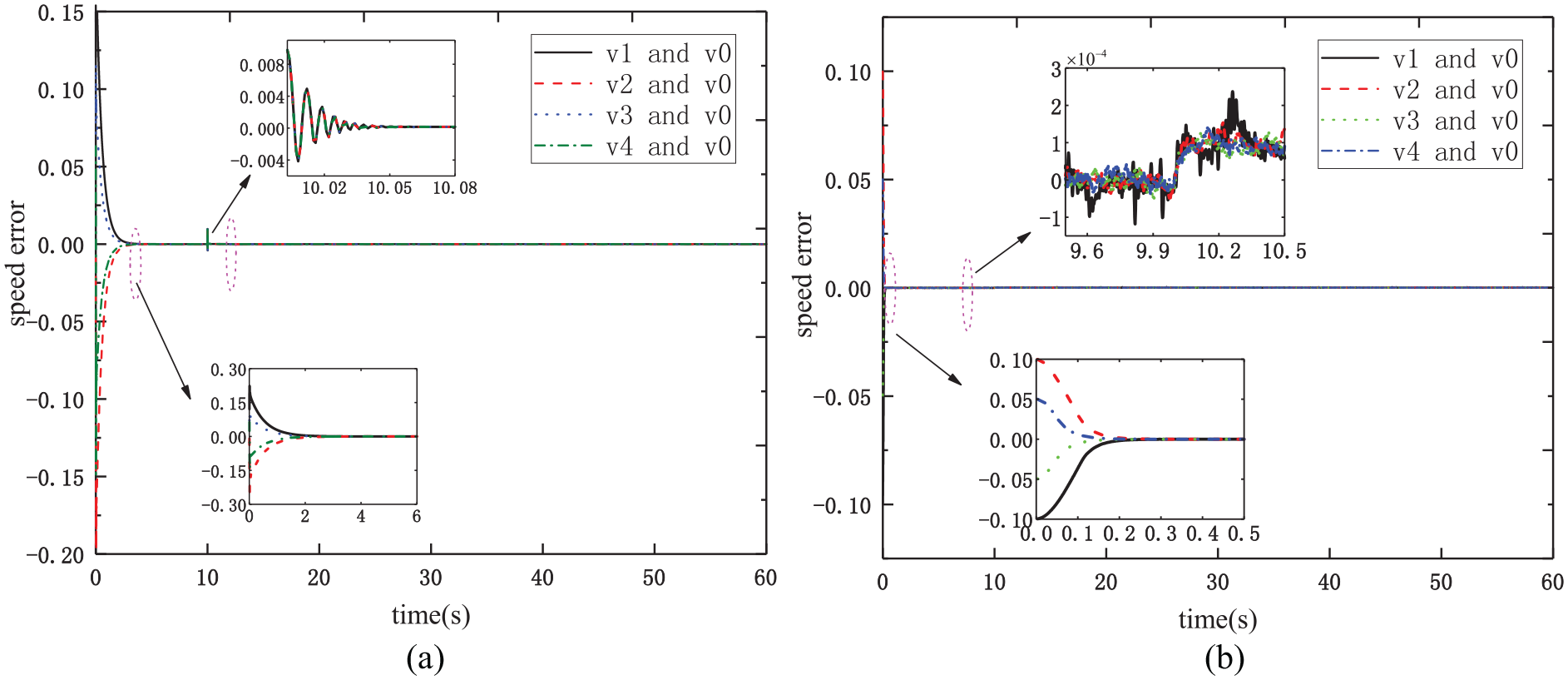
Multi-carriages Speed tracking error: (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
Figure 3(a) shows that there is only a sudden signal, each carriage tracks the desired trajectory within 2 s. To reflect the variability in the actual operation of the train, mutation disturbance is injected at 10 s, and displacement tracking is realized at 12 s. Figure 3(b) shows that each car realizes the tracking of the desired trajectory within 4 and 12 s in the case of abrupt signals plus Gaussian noise.
Figure 4(a) displays that the speed error of the train converges to 0 within 0.05 s. Figure 4(b) shows that the train achieves speed error convergence to 0 within 0.2 s. Meanwhile, the speed tracking diagram shows that the sudden disturbance and Gaussian noise does not affect the tracking accuracy.
Figure 5 shows the tracking control effect of eachcarriage during train operation. The figure illustrates the changes in the controller or torque experienced by each carriage during stable operation when input saturation has not occurred.
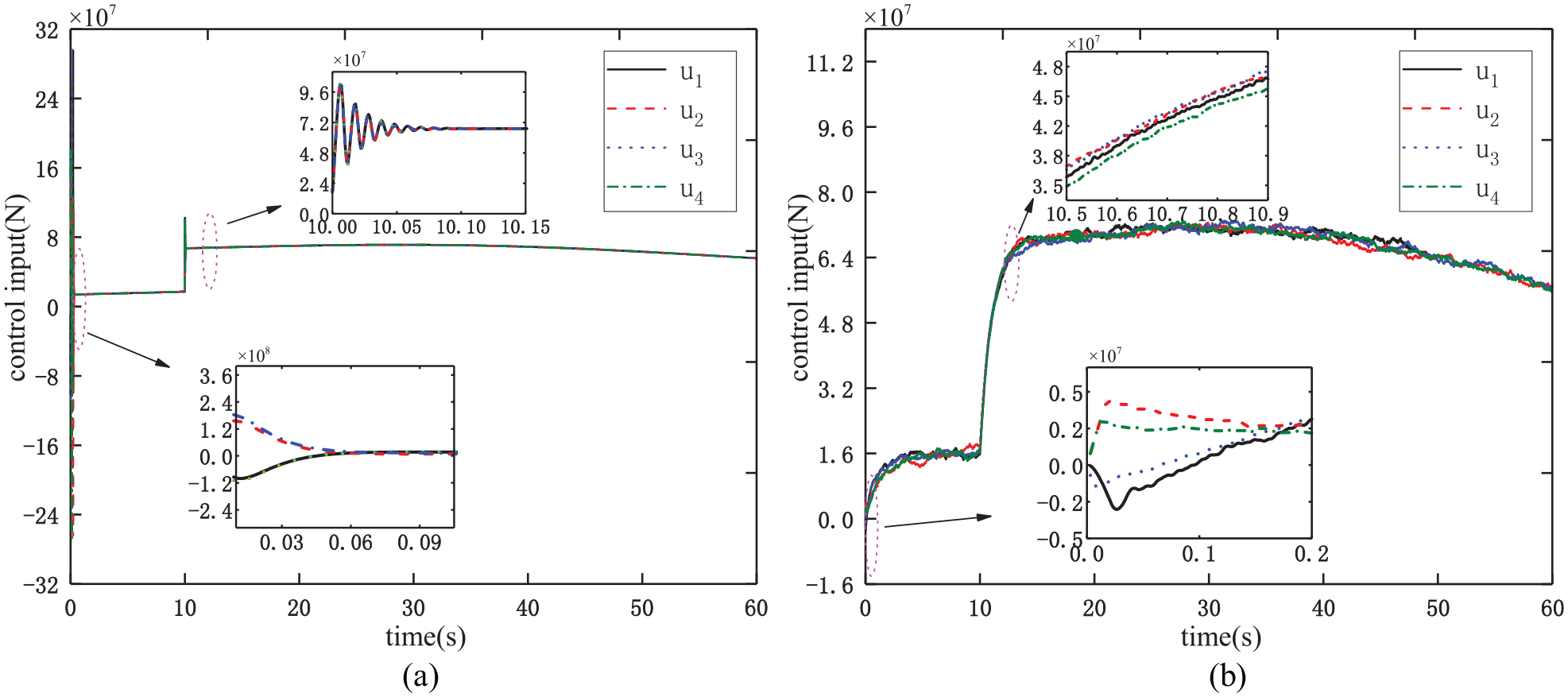
Controller effect without input saturation: (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
Simulation of input saturation tracking
When the train is running steadily, the controller or torque for each carriage suddenly changes and causes input saturation, causing the train to run abnormally. The simulation reaches the limit of the torque by limiting the upper and lower limits of the controller for ensuring that the controller parameters remain unchanged.
Figure 6 presents the effect diagram of the controller output state when input saturation occurs. The comparison of Figures 5 and 6 shows that the input saturation of the controller is mainly reflected in following three aspects: the start tracking state, the disturbance joining state, and the controller amplitude.
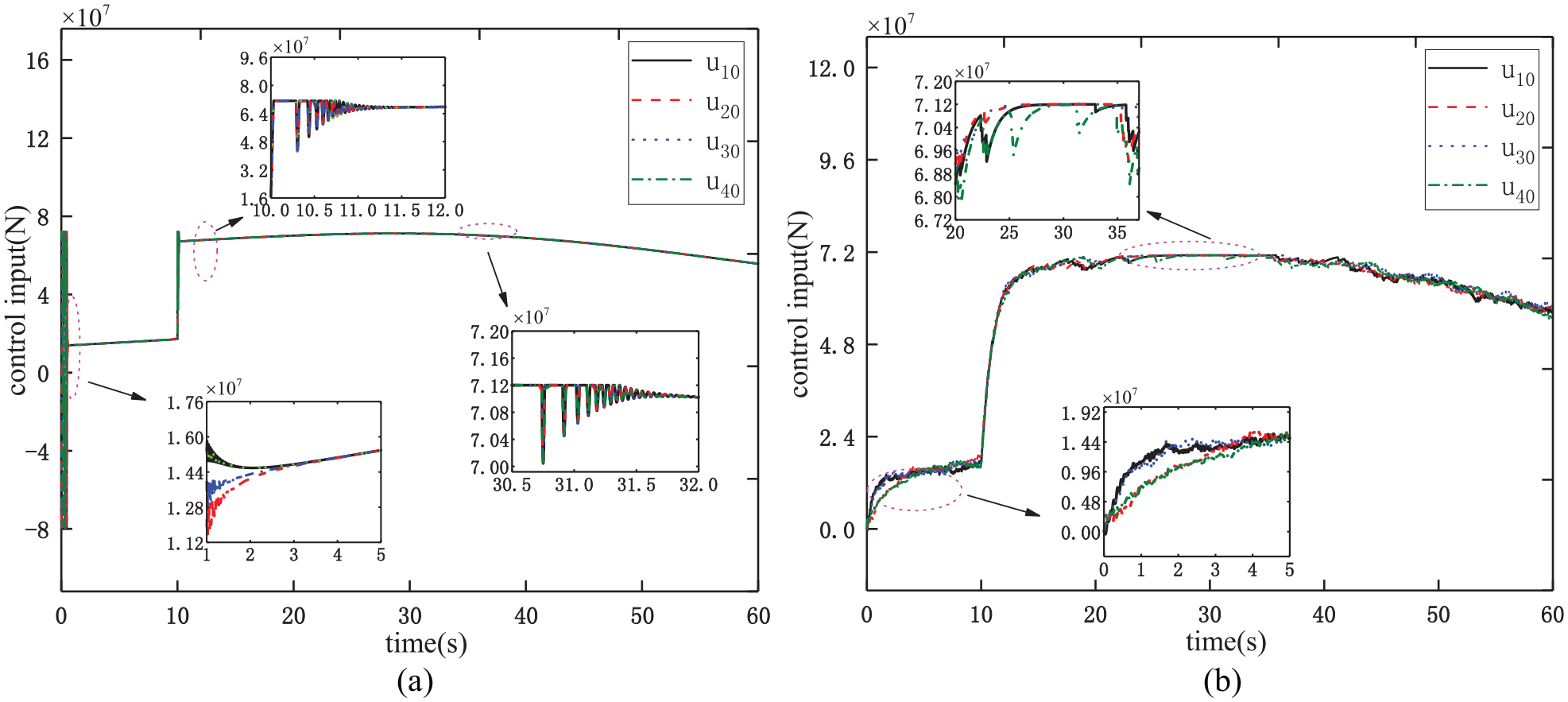
Controller effect with input saturation: (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
In this case, the two control effects of the classic anti-saturation control in Zhao et al. 23 and the designed improved anti-saturation control are compared. Figures 7 and 8 show the displacement and speed error tracking diagrams of the classic anti-saturation control in Zhao et al., 23 respectively.
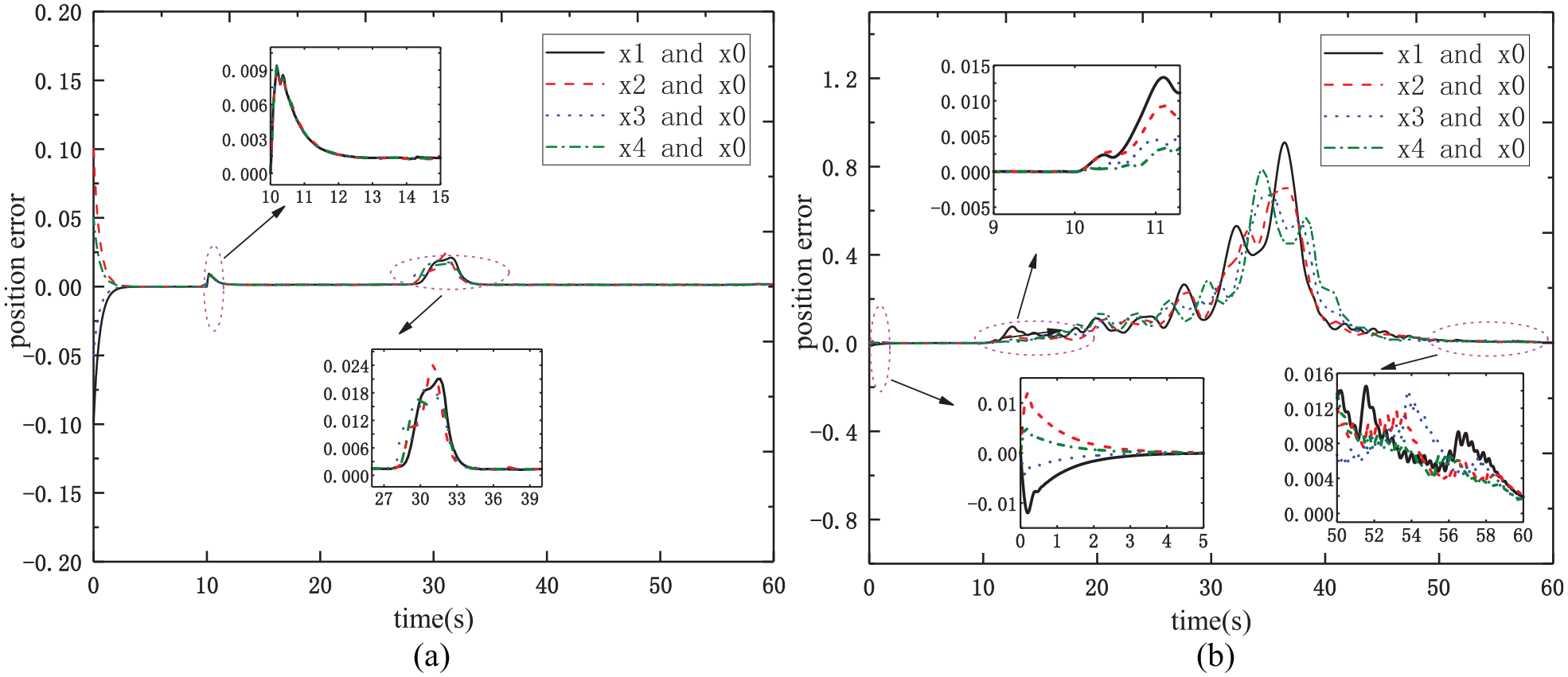
Multi-carriages displacement tracking error in Zhao et al. 23 : (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
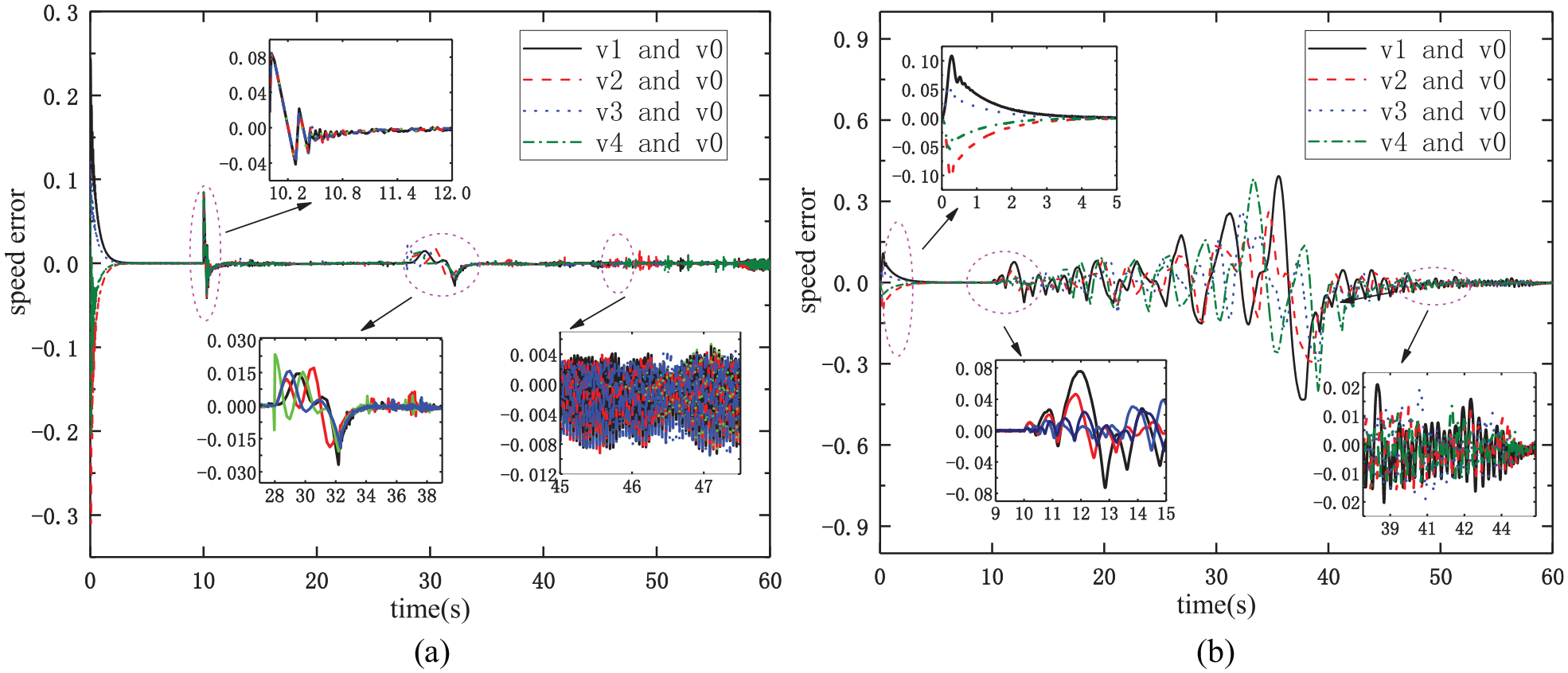
Multi-carriages speed tracking error in Zhao et al. 23 : (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
From Figure 7(a) and (b), it is found that the peak displacement error caused by the 10 s disturbance is 0.9% and 1.25%, respectively, and the peak value of the displacement error caused by the controller amplitude limitation is 2% and 80%, respectively. Quickly converge to 0.13% and 0.8% bounded areas.
From Figure 8(a) and (b), it is found that the peak speed error caused by the 10 s disturbance is 8% and 7%, respectively. The peak value of the speed error caused by the controller amplitude limitation is 1.5% and 5%, respectively. The train speed tracking error can quickly converge to 0.1%, 0.5% bounded areas. Figures 7 and 8 shows that the buffeting effect is poor during convergence.
This paper designs an improved anti-saturation controller. Figures 9 and 10 are the improved anti-saturation control displacement speed tracking error diagrams. From Figure 9(a) and (b), the peak value of the displacement error caused by the addition of the 10 s disturbance is reduced to 0.6% and 1%, respectively, caused by the controller amplitude limitation is 0.16% and 0.15 respectively. The convergence limit of train displacement tracking error is reduced to 0.04% and 0.2%.
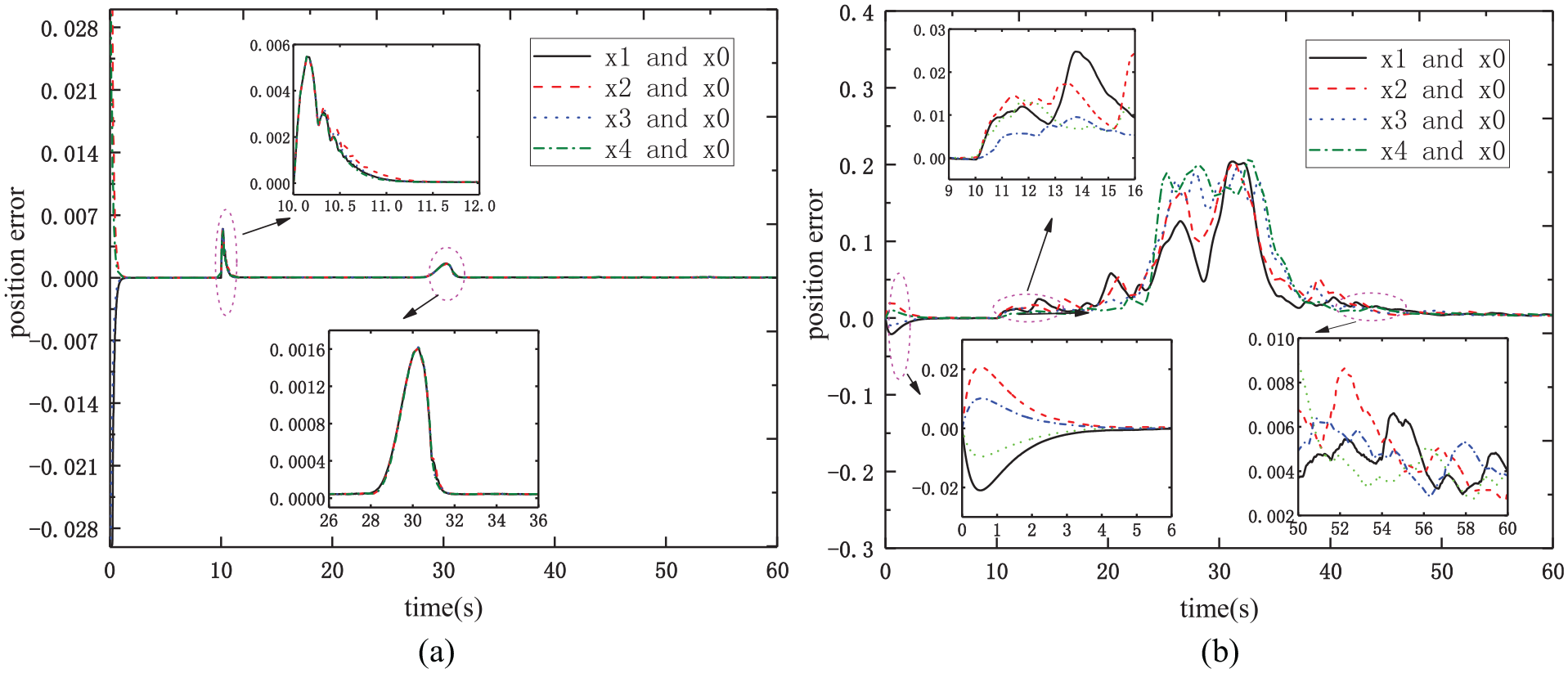
Multi-carriages displacement tracking error using proposed methods: (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
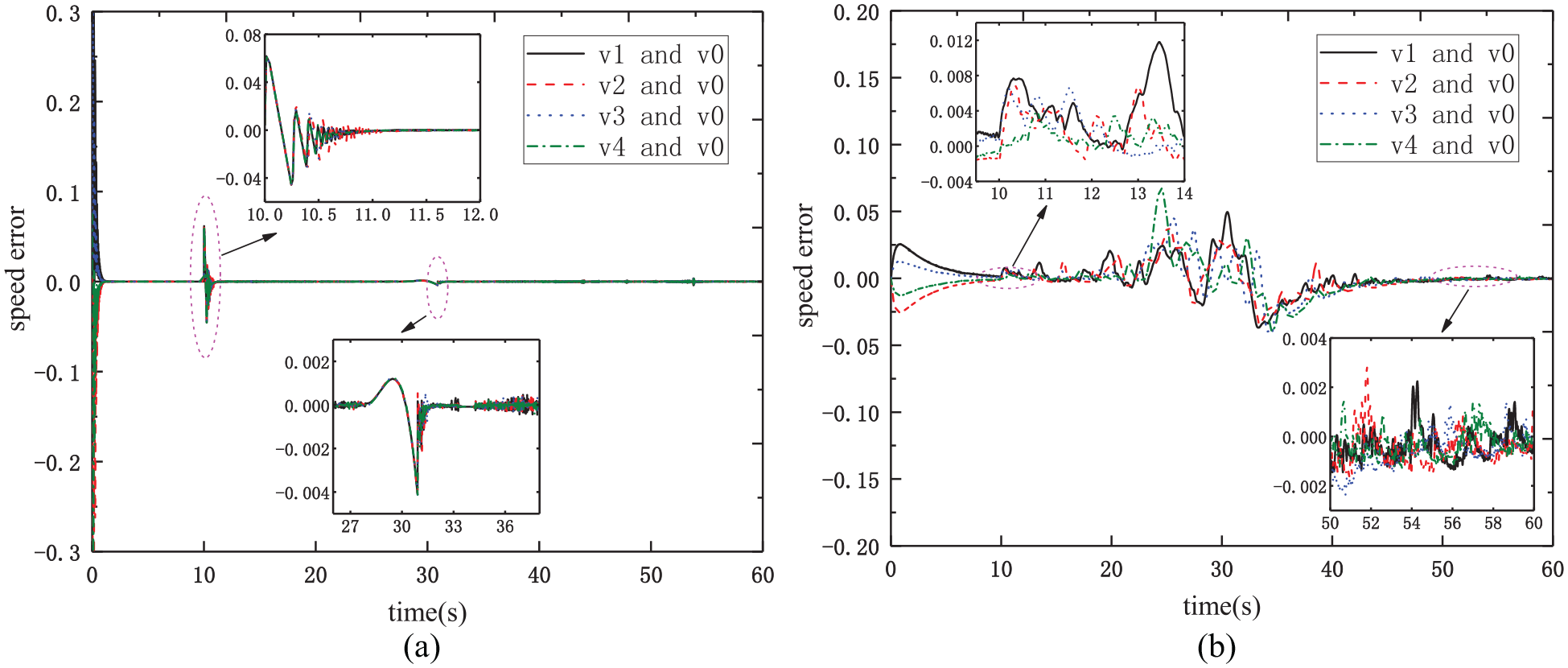
Multi-carriages speed tracking error using proposed methods: (a) the abrupt signal and (b) the abrupt signal plus Gaussian noise.
From Figure 10(a) and (b), the peak speed error caused by the 10 s disturbance is reduced to 6%, 0.8%, respectively, and the peak amplitude error caused by the controller amplitude limit is 0.1%, 5%, respectively. The speed tracking error convergence limit is reduced to 0.02% and 0.02%.
Figures 9 and 10 shows that the buffeting during the convergence process is well-suppressed.
When input saturation occurs, the comparison results indicate that the designed improved anti-saturation controller designed without changing the controller parameters not only achieves significant effects in suppressing the disturbances caused by input saturation and controller amplitude limitation, but also improves the convergence accuracy of the displacement and velocity tracking errors.
Conclusion
This study investigates the tracking control problem of HHTs with nonlinear coupling and uncertain disturbances when input saturation occurs. An anti-saturation SMES control method based on a DAC is presented to realise the bounded tracking of the target curve by each carriage. The introduction of a new type of DAC proves the stability of the dynamic auxiliary compensation system. Meanwhile, it effectively solves and reduces the upper bound of a compensation signal and enhances the engineering practicability and controllability. Finally, when the control parameters are unchanged, simulation shows that the algorithm has good anti-interference and anti-saturation capabilities and improves the tracking control accuracy compared with the traditional anti-saturation control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of China (U1934219, 61773159), Project of Hunan Provincial Department of Education (19A137), Hunan Provincial Natural Science Foundation of China (2020JJ6083).