
Abstract
Modeling the interactive behavior of human drivers is essential for achieving safe and fully autonomous vehicles. Unfortunately, most decision-making systems employed in current autonomous vehicles rely on complex deep neural network models that function as black boxes with opaque reasoning that hampers human interpretation. Drawing upon the needs theories endorsed by psychologists and driving-related psychological research, we summarize five fundamental driving needs underlying the driver’s behavior: safety, dominance, achievement, order, and relatedness. Leveraging the behavior selection module from general cognitive architectures, we propose a decision-making model explicitly tailored for autonomous vehicles, comprising three distinct modules: needs assessment, motivation generation, and behavior selection. We conducted experiments to evaluate the proposed model using a self-developed 2D simulator based on Unity. The results intuitively visualized the motivation and behavior of self-driving vehicles. This model demonstrates remarkable proficiency in handling routine tasks, such as independent and complete driving tasks, intersection navigation, and maneuvering among multiple vehicles.
Introduction
Accurate modeling of the interactive behavior of human drivers is crucial for achieving safe and full vehicle autonomy. It enables better prediction of human driver intentions and movements and is valuable for generating more human-like decisions and trajectories in autonomous vehicles. However, the current autonomous vehicle decision-making systems rely predominantly on complex deep neural network models that operate as black boxes with opaque reasoning that hinders human interpretation. The pursuit of a transparent and interpretable model in safety-critical domains has recently attracted attention, surpassing performance considerations alone.1–3
This paper presents a decision-making model that considers the psychology of human drivers. Drawing upon Maslow and Reiss’ theories,4,5 we consider every action driven by an underlying motive. Therefore, based on various psychological theories of needs and driving-related psychological research, this study summarizes and analyzes five fundamental driving needs that underlie driver behavior: safety, dominance, achievement, order, and relatedness. Referring to the behavior selection module of general cognitive architectures, we designed a decision-making model for autonomous vehicles based on these driving needs. The model comprises three modules: needs assessment, motivation generation, and behavior selection. The needs assessment module continuously monitors the real-time level of each need; the motivation generation module compares the priorities of urges conveyed by the needs assessment module to determine the urge with the highest priority. Finally, the behavior-selection module selects an action that aligns with the determined motivation.
Related work
Autonomous-driving decision-making has two primary approaches: behavior planning and end-to-end learning. 6 Behavior planning models, particularly those based on conditional representations, such as finite-state machines, are simple and effective decision-making methods. They discretize the action space and are well-suited for handling the interdependent behaviors of traffic participants in natural traffic environments, where the number of interactions exponentially increases with the number of individuals. For example, MIT’s Talos utilizes a navigation module for high-level behavioral planning in scenarios such as intersections, crossing, merging, and passing. 7 Mellon’s Boss takes a less granular approach by categorizing scenarios into three environments: roads, intersections, and zones. Correspondingly, the behavior layer of Boss distinguishes among three behaviors: lane driving, intersection handling, and achieving a zone pose. 8 However, finite-state machines, which are widely employed, have limitations in coping with large and complex systems, making it challenging to scale them up in line with the complexity of driving environments. A substantial number of states and conditions must be considered to extend these methods to more general urban traffic scenarios. This entails an enormous workload and is prone to errors during the pre- and post-maintenance stages.9–11
In contrast to finite state machines that rely entirely on determined state transfer and decision rules, the partially observable Markov decision process (POMDP) provides a framework to address dynamic decision problems in imperfectly observable states. 6 The Karlsruhe Institute of Technology has been exploring the application of POMDPs in decision-making for autonomous driving in the post-DARPA era. In 2014, Brechtel et al. introduced a continuous POMDP-based decision process that incorporated the poses and speeds of relevant road users. The experimental results demonstrated successful merging of the ego vehicle into the target lane without severe occlusion of the perceptual system. 12 In 2017, Hubmann et al. proposed a unified POMDP decision framework that not only considered the intentions and predicted movements of surrounding vehicles, as in previous works, but also focused on intersections of any geometry with any number of traffic participants. By pre-planning routes and speeds prior to simulation, the authors reduced the action space for real-time planning. 9 The exploration of POMDP at the Karlsruhe Institute of Technology has yielded promising results in simulating unsignalized intersections. However, applicable scenarios are currently limited, and the authors hope that future research will expand the scope to complex environments such as multiple lanes. In traffic environments, autonomous vehicles require frequent decision-making. However, the challenge with POMDP lies in the time-consuming computational process and the difficulty of real-time application in online driving environments unless the complexity of the action space or environment can be reduced. 6
The end-to-end approach to automated driving can be traced back to the development of the ALVINN by Carnegie Mellon University in 1989. 13 Inspired by ALVINN, the NVIDIA team introduced a convolutional neural network in 2016 that directly generated steering control commands for vehicles using raw images from three front-facing cameras. This network is extensive and features 20 million connections and 250,000 parameters. The experimental results demonstrated the ability of the test vehicle to successfully navigate various road environments and diverse weather conditions. 14 In 2018, Bansal et al. developed the ChauffeurNet decision-making neural network. It uses a reconstructed top-down image generated through perception system processing as the input. This image encapsulates complex urban-environment information such as vehicles, roads, signals, and a predefined route. The image is first processed by FeatureNet to extract the features, which are then used by AgentRNN to generate driving paths. Finally, the controller converts these paths into steering-wheel angles and accelerations. The ChauffeurNet model successfully operates a real-world vehicle although improvements can be made when compared with traditional motion-planning methods. 15 Chen et al. adopted a similar technical approach at the University of California, Berkeley. They developed a deep imitation learning trajectory planning module utilizing a convolutional neural network with a fully connected layer containing 1000 units connected after the VGGNet16. The output layer represents the relative coordinates of the target sequence. Despite encountering errors in roundabouts, unstructured areas, and two-lane roads, the model demonstrated the ability to follow designated routes in multiple road environments. It responded to surrounding objects and adjusted to different traffic signal states, achieving results using only 120,000 data frames. 16
Some studies argue that the behavior planner, tasked with making high-level decisions, and the trajectory planner, responsible for generating feasible trajectories, are commonly independently developed, lacking a shared objective. This separation changes the behavior planner, adversely affecting the fine-tuned trajectory planner, thus failing to fully exploit their strong coupling. Consequently, studies have attempted to address this issue by integrating behavior planning with motion planning. Uber’s Sadat et al. proposed an approach featuring an interpretable cost function and a joint learning algorithm that learns a shared cost function employed by both their behavior and trajectory components. Experiments have demonstrated that the jointly learned planner performs better in terms of both similarity to human driving and other safety metrics. 17 In another study, Singh et al. proposed a bi-level optimization that can simultaneously search for the optimal higher-level behavioral decisions along with the lower-level trajectories necessary for executing them. Extensive simulations demonstrated that their approach outperforms state-of-the-art model predictive control and reinforcement learning approaches in terms of collision rate while remaining competitive in driving efficiency. 18
Although safety and ethical concerns persist, 19 both the end-to-end approach and other AI-based decision-making methods have achieved significant advancements. Current automated driving decision methods rely predominantly on deep neural networks and fall under the connectionist approach of cognitive science. These models often process data in a black-box manner and lack interpretability. Although these models yield accurate prediction results, explaining their underlying logic and decision-making processes has become challenging. In the event of problems during simulation tests, the interpretability of autonomous vehicle decisions is crucial for analyzing the triggering factors of accidents and promptly troubleshooting the tested autonomous driving system.20,21
Decision-making model
General structure
The decision-making model presented in this paper was inspired by the CLARION 22 and MicroPsi 23 cognitive architectures. Figure 1 illustrates this model following a driving-need-driven approach. It comprises three modules: needs assessment, motivation generation, and behavior selection. The needs assessment module continuously monitors real-time needs. When an autonomous vehicle experiences an urge for one or more needs in its current environment, the needs assessment module sends the urge to the motivation-generation module. The motivation-generation module compares the priorities of the urges received from the needs-assessment module. Urges with higher levels are assigned higher priority and become the driving force. Even if an action selected at a lower level is already in progress, it is immediately terminated to relinquish decision dominance. Finally, the behavior selection module makes further assessments and determines the appropriate behavioral action that aligns with motivation, including the goal of the action and the timeframe to achieve it.
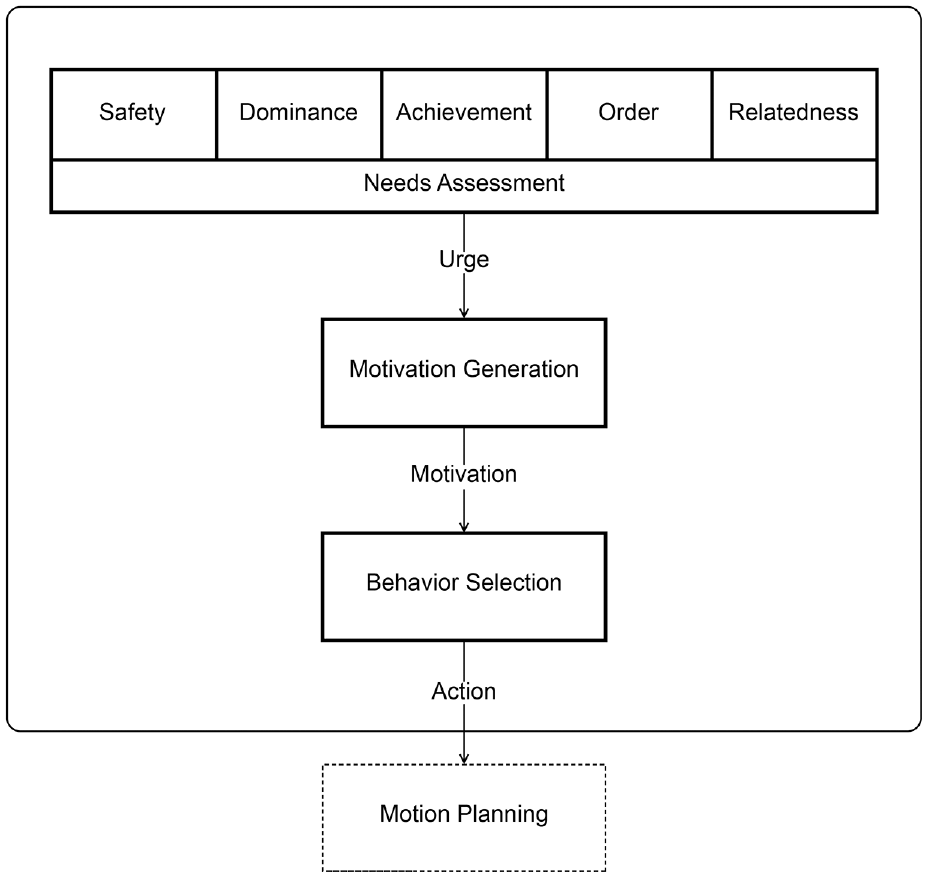
General structure of the decision-making model. It comprises three modules: needs assessment, motivation generation, and behavior selection.
Needs assessment
Real-time evaluation and monitoring of the urge
Urge for safety
Safety is a fundamental requirement for survival, which compels individuals to avoid risks and potential harm when faced with external threats. The significance of safety needs in driving is evident from the fact that, as of 2008, approximately 10% of the articles published in the journal Human Factors focused on driving and driving safety. 33 Meeting safety needs is crucial for drivers because it allows them to feel secure and comfortable while driving, minimizing excessive psychological loads. Drivers are compelled to maintain an adequate distance from stationary entities, such as road boundaries and obstacles, and dynamic entities, such as vehicles and pedestrians. Summala’s “multiple comfort zone” model introduces the concept of a “safety margin,” which defines safety requirements in terms of time and space. Once an entity enters the driver’s subjectively constructed “safety margin,” the driver experiences discomfort and fear, prompting them to take appropriate actions, such as braking or steering, to pull away and mitigate potential risks.34,35
The urge for safety

Urge for dominance
Dominance refers to the desire to exert influence over the environment and fulfill one’s aspirations. In the context of driving, the need for dominance is evident through a driver’s active control of speed and direction. Summala suggests that whether driving at a normal speed or pushing the limits for excitement, drivers experience a sense of “driving pleasure,” which arises from fulfilling their desire for control over the vehicle. 36 The discretionary lane changes observed in the microscopic traffic-flow models can be attributed to the need for dominance. 37 Drivers can change lanes to adjacent lanes to maintain their desired speed without being impeded by slower traffic in the same lane, thereby ensuring control over the driving situation.
The need for dominance

where


Urge for achievement
This requirement for achievement is typically purposeful. Accomplishing a goal or task is necessary to achieve ambition. 38 Summala’s “good or expected driving progress” concept captures the driver’s need for achievement. 34 In microscopic traffic models, mandatory lane changing is typical behavior driven by the need for achievement, particularly when reaching a destination. 35 However, Vechione et al. present slightly biased situations to justify mandatory lane changes, such as unsustainability in the current lane or the need to cooperate with intersection turns. 39
Nonetheless, these situations only partially encompass the range of mandatory lane changes. For example, if a driver intends to travel straight and the left-turn lane is not part of the planned route, a mandatory lane change is necessary if the driver is in the left-turn lane at that point. Therefore, a mandatory lane change occurs when the current lane deviates from the planned route. Conversely, when drivers are already in a lane that aligns with the planned route, they would refrain from making a lane change to fulfill their driving task, driven by the need for achievement. When establishing a planned route from the initial point to the destination, it is imperative that autonomous vehicles adhere to this route. Hence, throughout the journey, an autonomous vehicle must continuously assess whether the current lane aligns with the planned route. This evaluation involves determining whether a lane change is required. Specifically, if the estimated distance for a lane change

Before determining the achievement urge, the nearest candidate lane

The lanes nearest the current lane from the set

where

Because more than one candidate target lane closest to the current lane

Using the average speed

where

where
Urge for order
The need for an order pertains to adhering to regulations and avoiding penalties. In the context of driving, these regulations include formal traffic laws,36,40 such as obeying traffic signals, staying within designated lanes, and adhering to speed limits, and informal rules. 41 Adhering to these rules helps drivers avoid accidents and penalties, 33 enhances the overall efficiency driving, minimizes congestion and accidents, and saves time and expenses for both drivers and other road users. A straightforward example is when approaching a signalized intersection that follows the instructions displayed by traffic signals, either coming to a stop or proceeding, depending on the signal’s indication. In the absence of traffic signals or police instructions, drivers follow rules applicable to unsignalized intersections, such as yielding to straight-through traffic, giving way to vehicles on the main road at a junction, and prioritizing right turns.
While the need for order is relevant throughout the journey, certain actions, such as staying within lanes and adhering to traffic regulations, are already implicit in the motion planning process. Therefore, the current model explicitly incorporates the need for order as autonomous vehicles approach intersections. As an autonomous vehicle approaches an intersection, the need for an order

An order urge is generated when the distance
Urge for relatedness
The need for relatedness encompasses the desire to establish connections with others, manifesting as positive experiences, such as acceptance, respect, and reciprocity, or negative experiences, such as refusal to cooperate, rejection, and confrontation. While Summala’s “multiple comfort zones” model primarily focuses on individual needs, it does not extensively address interpersonal dynamics.33,34 Rumar defines relatedness as a traffic objective that involves interacting with other traffic participants in a manner that maintains mobility while avoiding collisions. 36 However, achieving this goal in practice is challenging. For instance, when a vehicle in an adjacent lane merges into the driver’s lane, the driver may adjust the speed and increase the following distance to facilitate merging if they accept or agree with the other vehicle’s behavior. Conversely, if the driver rejects or opposes merging, they may maintain or slightly increase their speed while reducing the following distance to prevent the other vehicle from merging. It is evident that maneuverability is compromised in the former scenario, whereas collision risk is heightened rather than mitigated in the latter scenario.
The need for relatedness encompasses the desire to cooperate with other traffic participants, seek approval and recognition, and express refusal. In the context of autonomous vehicles, other dynamic entities

Motivation generation
Psi’s theory proposes that all goal-directed actions stem from motivation. 42 Reproducing these motivations enhances the comprehensiveness of the decision model and provides a deeper understanding of the underlying mental processes. Once the environment triggers the generation of urges corresponding to needs, the motivation generation module compares the priorities of all available urges. The urge for higher priority is the prevailing motivation. Even if an action planned at a lower level is currently being executed, it must be terminated immediately to relinquish the dominance of the decision. The priority order of each urge within the motivation generation module is outlined below.

In the above equation,
Behavior selection
Alternative behaviors and actions
This section confines the actions that the driver can perform

Changing speed
The changing speed

Both action

Finally,
Changing lane
Changing lane

Mandatory lane changing
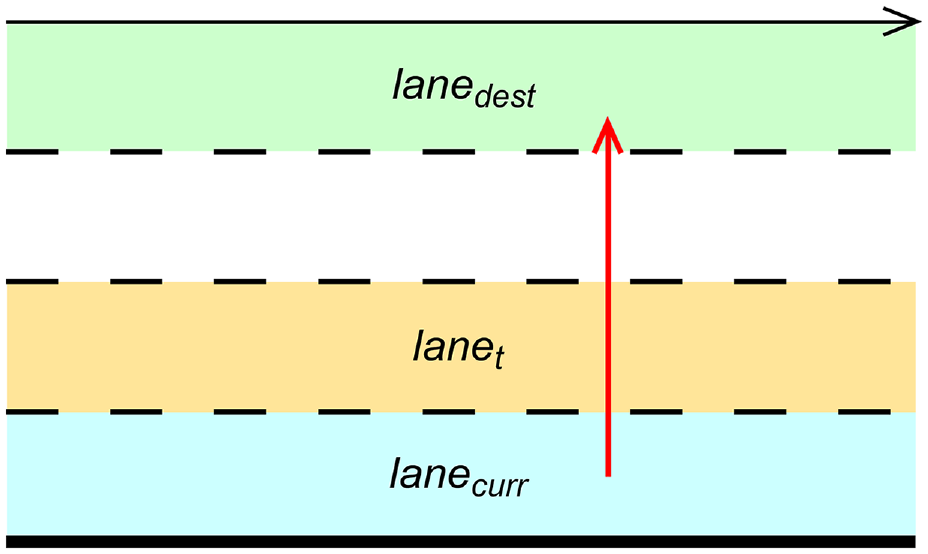
Interrelationships between lanes. Current lane
After determining the set

where

We then check if the lanes in

where
Discretionary lane changing

We then filter adjacent lanes using average speed to retain lanes with faster average speeds.

where denotes the current lane average speed and

If set
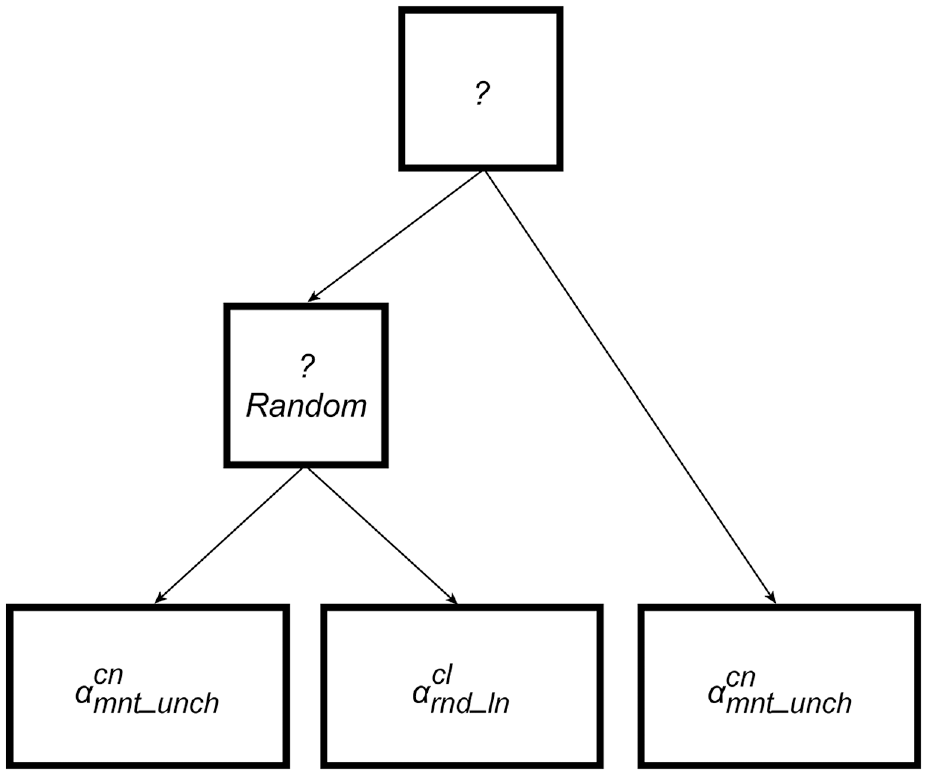
Random lane changing

If there are still two lanes in set
Aborting lane changing
During the execution of any of the aforementioned lane-changing actions,
Maintaining unchanged

Behavioral decision for each motivation
In this study, the behavioral decisions for each motivation were represented using individual behavior trees. Behavior trees are widely adopted for designing and implementing intelligent behaviors in various systems. They offer a hierarchical structure that enables the creation of complex and adaptive behaviors by organizing smaller behavioral units known as nodes.
The execution of a behavior tree commences at the root, which sends ticks to its child nodes at a predefined frequency. A tick serves as an enabling signal to execute a child node. When a node in the behavior tree is eligible for execution, it returns a status to its parent, indicating whether it is “running” if its execution is ongoing, “success” if it has achieved its goal, or “failure” if it has not.
This study utilized three control nodes (sequence, selector, and random selector), two execution nodes (action and condition), and one decorator node (inverter). The sequence node (Figure 3(a)) seeks and executes the first child who has not yet succeeded. The selector node (Figure 3(b)) identifies and executes the first child that does not fail. The random selector node (Figure 3(c)) randomly selects and executes one of its child nodes. The condition node (Figure 3(d)) assesses a specific condition and returns a success or failure status based on the evaluation. An action node (Figure 3(e)) represents a specific action or behavior that the agent or system should perform. The inverter node (Figure 3(f)) inverts the result of its child node.

Nodes in the behavior tree. This study utilizes three control nodes ((a) sequence, (b) selector, and (c) random selector), two execution nodes ((d) condition and (e) action), and one decorator node ((f) inverter).
Actions for safety motivation
The behavioral decisions driven by safety motivation are shown in Figure 4. It begins by determining whether the hazard originates in the longitudinal or the lateral direction. Suppose that the dynamic entity ahead

Behavior tree for safety motivation.
An additional emergency braking action,
Suppose that the ego vehicle is in the process of changing lanes and becomes too close to a lateral adjacent dynamic entity. In this case, the lane-change action must be promptly aborted and the vehicle should be returned to the original lane via
Actions for dominance motivation
When a dominance motive is present, it is essential to differentiate whether it arises from an urge associated with the preceding vehicle
If the preceding vehicle enters the ego vehicle’s field of view and its speed is slower than the ego vehicle’s current speed, the motive is related to the preceding vehicle. In this case, the ego vehicle can maintain its current motion and signal the preceding vehicle via
If the current lane is unobstructed by the preceding vehicle, or if there is no preceding vehicle at all and the ego vehicle’s speed is lower than the desired speed, it suggests that the dominance motive is speed-dependent. In this scenario, the ego vehicle can engage in a speed adjustment action

Behavior tree for dominance motivation.
Actions for achievement motivation
The behavioral decision process driven by the achievement motive begins by assessing whether the current lane
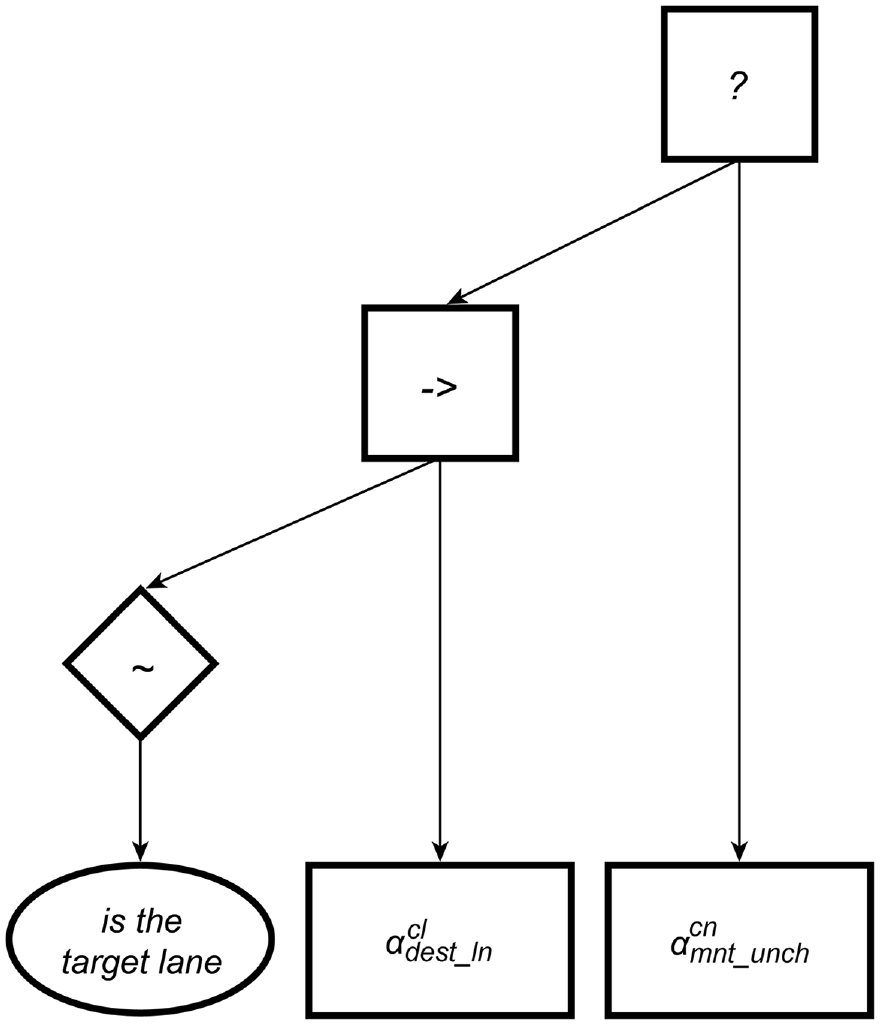
Behavior tree for achievement motivation.
Actions for order motivation
Behavioral decisions driven by the order motive are currently governed by traffic rules applicable to unsignalized intersections that dictate that vehicles proceed sequentially based on their arrival order at the intersection. If there are preceding vehicles traversing the intersection, vehicles approaching the intersection must stop at the designated stop line via

Behavior tree for order motivation.
Actions for relatedness motivation
The behavioral decision process driven by the relatedness motive is divided into three distinct scenarios. First, suppose that the ego vehicle is undergoing a lane change when it receives a request from the vehicle behind it. In this case, it has the option to either proceed with the ongoing lane-change action or abort the lane change and return to the original lane via
Second, suppose that the ego vehicle is in a normal driving state and does not undergo a lane change when it receives a request. In this case, it can respond by selecting one of three actions: adjusting the speed
Third, when the ego vehicle receives a request from the vehicle ahead, a possible scenario arises in which a vehicle in an adjacent lane intends to merge into the ego vehicle’s lane. In response, the ego vehicle can choose to either accept the request and ensure a safe distance by slowing down and yielding via

Behavior tree for relatedness motivation.
Unmotivated
When none of the motives are fulfilled, the autonomous vehicle resorts to selecting one of the two actions:
Behavior tree for the unmotivated state.
Experiments
The autonomous driving model employed for the experimental validation in this study adopts Michon’s three-level driver behavior model, which includes strategic, maneuvering, and control levels. 43 At the strategic level, path planning was accomplished using the A* algorithm based on the road network. The maneuvering level was further divided into behavioral and motion planning. The decision-making process utilizes the model proposed in this study, whereas the motion planning aspect employs the analytical calculation method outlined by Li. 44 Lastly, the control level assumes an ideal “unit 1” scenario, where vehicle control and dynamics are optimized. In other words, the ego vehicle precisely follows the trajectory generated by the planning module.
The experiments were performed on a MacBook Pro (16-inch, 2019) with a 2.3 GHz Intel Core i9 processor, 32 GB 2667 MHz DDR4 memory, and AMD Radeon Pro 5500M with 8 GB of graphics memory. The software employed in this study was a custom-developed 2D simulator built on Unity 2022.2.0b12, 45 and all programming tasks were implemented using the C# language. Each vehicle within the simulation utilized the same decision-making model, but with distinct preference settings. Given the multifaceted nature of the model, the evaluation process involved conducting three separate experiments to validate the different features. The experiments were conducted as follows:
Completion of the assigned driving task: In this experiment, a vehicle traveled from its designated starting point to a predefined destination. The objective was to assess the ability of the model to navigate predetermined routes effectively.
Handling unsignalized traffic junctions: Four vehicles converge at a junction sequentially, and each vehicle must wait for the preceding vehicles to exit the junction before entering. This experiment focused on the capability of the model to navigate through unsignalized junctions.
Weaving ability in multilane traffic: A vehicle is expected to maneuver skillfully through groups of vehicles from the rear of a multilane highway, allowing it to increase its speed. This experiment evaluated the weaving ability of the model in multilane traffic situations.
Completion of assigned driving task
The autonomous vehicle embarked on its journey from lane 1 on Road 2392, with the ultimate destination being Road 2452. The planned route, indicated by the green lines in Figure 10, encompassed road IDs 2392, 2391, 2431, 2432, 2289, 2655, 2446, 2444, 2365, 2361, 2367, and 2452. Figure 11(a) visually depicts the vehicle’s location at each moment throughout the driving task.

Planned route for the assigned driving task. The planned route, indicated by the green lines, encompassed by road IDs 2392, 2391, 2431, 2432, 2289, 2655, 2446, 2444, 2365, 2361, 2367, and 2452.

Completion of the assigned driving task. From top to bottom, the five panels (a–e) represent the road ID, longitudinal displacement, motivation, action, and longitudinal velocity versus time of the autonomous vehicle, respectively.
Beginning at
Handling unsignalized traffic junctions
Four autonomous vehicles, namely
-
-
-
-
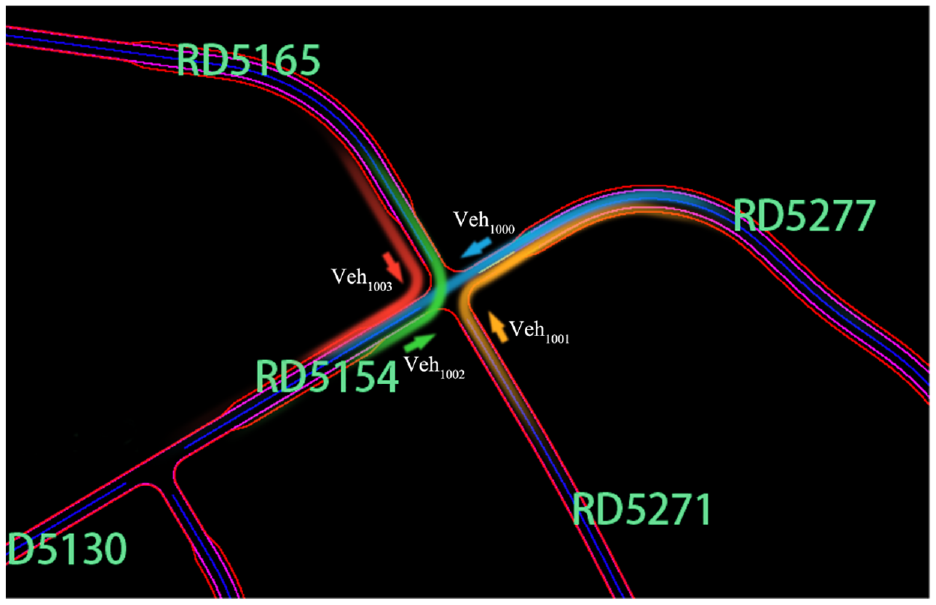
Routes followed by each vehicle.
Each of the four vehicles began their journey at 4 s intervals. Upon starting, each vehicle entered the dominance motivation, increasing its speed to approximately
At

Top-view screenshots of (a)
Subsequently, at
By
From top to bottom, the five panels in Figure 14 show the road ID, longitudinal displacement, motivation, action, and longitudinal velocity versus time for the four vehicles, respectively. The blue dash-dot-dotted, orange dashed, green dotted, and red dash-dotted lines represent

Handling unsignalized traffic junctions. From top to bottom, the five panels (a–e) represent road ID, longitudinal displacement, motivation, action, and longitudinal velocity versus time for the four vehicles. The blue dash-dot-dotted, orange dashed, green dotted, and red dash-dotted lines represent
Weaving in multilane traffic
From top to bottom, the seven panels in Figure 15 show the longitudinal displacement, motivation, action, longitudinal velocity, lane ID, lateral displacement, and lateral velocity versus time for the six vehicles, respectively. The blue dash-dot-dotted, orange dashed, green dotted, red dash-dotted, purple dense dash-dotted, and pink solid lines represent

Weaving in multilane traffic. From top to bottom, the seven panels (a–g) respectively represent the longitudinal displacement, motivation, action, longitudinal velocity, lane ID, lateral displacement, and lateral velocity versus time for six vehicles. The blue dash-dot-dotted, orange dashed, green dotted, red dash-dotted, purple dense dash-dotted, and pink solid lines represent
At
At
At
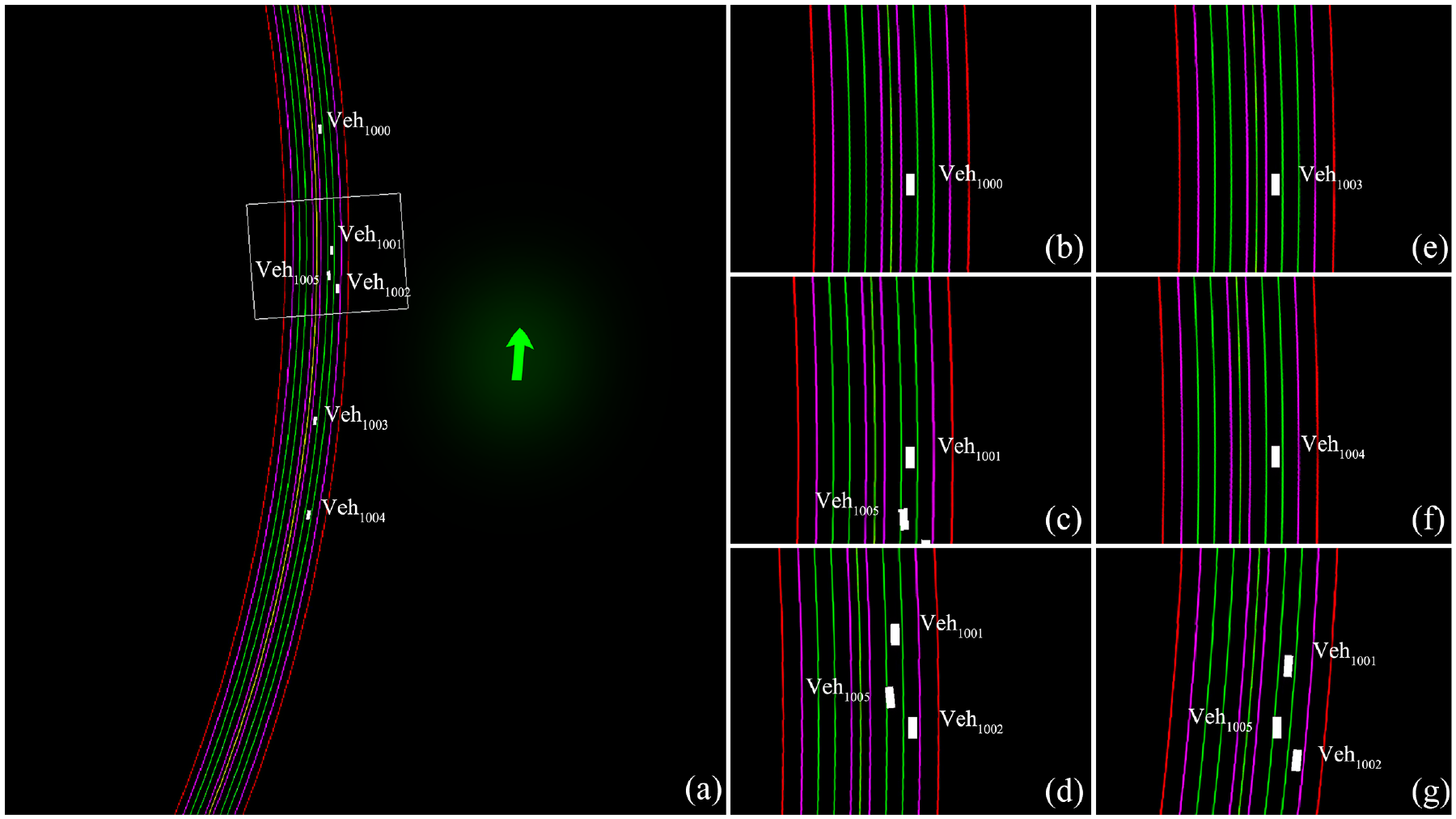
Top view screenshots of (a) all vehicles, (b)
Conclusion
We summarize and analyze the five fundamental driving needs underlying driver behavior, namely, safety, dominance, achievement, order, and relatedness, based on various psychological needs theories and research on driving psychology. Subsequently, an interpretable autonomous driving decision-making model is proposed. The model consists of three modules: needs assessment, motivation generation, and behavior selection. The needs assessment module continuously monitors the levels of various needs in real-time. The motivation generation module compares the priority of urges sent by the needs assessment module and determines the urge with the highest priority as the motivation. Finally, the action behavior selection module determines the actions that align with motivation. The experiments were conducted using a self-developed 2D simulator based on the Unity software. All vehicles in the simulation were equipped with the same decision-making model, but with different preferences. The results provide intuitive observations of the motives and behaviors of autonomous vehicles and demonstrate their effectiveness in various driving tasks, including single-lane driving, intersections, and multi-vehicle interactions.
However, the existing approach for behavior selection is based on a behavior tree, which is a relatively rigid planning method. Once the structure is established, the method of behavior selection remains unchanged. Future research endeavors may explore alternative methods that offer greater flexibility, introducing a higher level of uncertainty in behavior selection.
Footnotes
Handling Editor: Sharmili Pandian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.