
Abstract
The overtaking process between two simplified Ahmed body models is studied using a set of static experiments to provide a comparison basis for the numerical study. Both steady-state (static) and transient (dynamic) simulations are performed. There are notable differences of the drag and side force coefficients between the predicted and experimental results in the wake effects on the overtaking model as well as under a situation when two models are parallel for the static tests. These differences are attributed to the SST
Keywords
Introduction
When one vehicle overtakes another, the external flow field around the two vehicles generates interference and creates additional transient aerodynamic forces (i.e. gust loads) that act on the vehicles, particularly at relatively high speed and short lateral separation. These gust loads change the stability of the two vehicles and affect driving safety. Full-scale testing on-road or with crosswind generators in large wind tunnels to analyze these additional aerodynamic forces and the flow structure for the overtaking process is expensive. Studies are generally conducted using scaled-down models in a wind tunnel in a static (i.e. steady) or dynamic (i.e. transient) state.
Dynamic tests are conducted by moving one vehicle and not the other at a specific wind speed in a wind tunnel. Static tests place one vehicle at various discrete positions relative to the other which remains fixed. Both vehicles are subjected to the same wind speed. Dynamic testing is more technically complicated in terms of the experimental facility and operating technique than static testing so most experimental studies of the fundamental parameters for the overtaking process use static processes with scaled-down models.
In a very early study of the overtaking process, Heffley 1 determined the aerodynamic interference between a passenger car and a truck (or bus) at different yaw angles using static wind tunnel experiments. A similar experimental study was undertaken by Howell et al. 2 Howell 3 studied the effect of longitudinal and transverse spacing on the aerodynamic characteristics of small and large vehicles. Yoshida et al. 4 studied the effect of crosswind, shape, and size ratio on the aerodynamic force during the overtaking process using scale models and concluded that the side force and yaw moment are the two major factors for aerodynamic characteristics.
Abdel Azim 5 and Noger and Grevenynghe 6 determined the transient aerodynamic forces and moments that are induced on heavy and light vehicles during overtaking. Minato et al. 7 and Abdel Azim and Abdel Gawad 8 studied the aerodynamic interference during the overtaking process for two passenger cars and identified the wake structures behind the interacting vehicles using flow visualization.
Most experimental studies of the overtaking process are conducted using scale models in wind tunnels. Few studies use a fully sized vehicle on-road. Kremheller 9 performed on-road driving tests for the overtaking process on a proving ground. Two primary vehicles, a C-Hatchback and a B-Crossover, were instrumented and a median size van and a 3.5-ton truck were used as secondary vehicles without instrumentation. The pressure on the test vehicle was qualitatively the same but was greatly increased when it was overtaken by vehicles with a larger displacement area.
A comparison between static and dynamic tests was made by Yamamoto et al. 10 to experimentally determine the effect of the aerodynamic force that acts on a 1/10-scale passenger car that is overtaken by a 1/10-scale bus. A qualitative conclusion showed that the dynamic effect is small if the relative speed between the two vehicles is small. Noger et al. 11 used a dimensionless parameter r, which is defined below, to represent the extent of the dynamic (transient) effect.

where
The overtaking process has been extensively studied using numerical modeling. Clarke and Filippone, 12 Uystepruyst and Krajnovic, 13 and Shao et al. 14 simulated the overtaking process for two car models to determine the effect of lateral separation and relative speed for two models on the aerodynamic forces that act on them. The results show that there is increased interference between the aerodynamic forces that act on the vehicle models as the lateral separation decreases and/or the relative velocity between the two vehicle models increases during the overtaking process.
The effect of crosswind on the aerodynamic characteristics during the overtaking process were numerically studied by Corin et al.
15
and Liu et al.
16
A crosswind during overtaking significantly affects the aerodynamic forces on the two models, especially the overtaken model. Corin et al.
15
also studied the difference between steady-state (
An appropriate turbulence model is essential to simulate complex flows, such as those for the overtaking process. In terms of the computational resource that is required for a simulation, most numerical studies of the overtaking process use two-equation Reynolds-averaged Navier-Stokes equation (RANS) models, which are, to a certain degree, reliable and economic turbulence models. These include the standard
A numerical simulation of the overtaking process also requires a large computational domain, particularly for the direction of movement for the vehicle, if the simulation assumes inlet and outlet conditions. A previous study by the authors
20
showed that the inlet and outlet boundaries must be placed at least
To determine the aerodynamic phenomena for a vehicle overtaking (namely, wake effect hereafter) or being overtaken (namely, blockade effect hereafter) by another, this study uses a set of static-type experiments for the overtaking process and the results are compared with those for steady-state simulations. There is transient motion around two vehicles during the overtaking process so transient simulations using different relative velocities (i.e.
Experimental method
Experiments were conducted in Atmospheric Boundary Layer Wind Tunnel of the Architecture and Building Research Institute of the Ministry of Interior, Taiwan, which is located at the Kuei-Jen campus of the National Cheng Kung University. The wind tunnel is a closed type and has a test section of 36.5 m (length) × 4 m (width) × 2.6 m (height). The maximum flow speed is 30 m/s, and the turbulent intensity of the freestream flow is about 0.5%.
Two identical 7/10 simplified Ahmed-body models
23
with dimensions of 730.8 mm long (

(a) Sketch of the simplified Ahmed-body model and (b) dimensions of the model (unit: mm) and the locations for surface pressure measurement.
The origin of the Cartesian coordinates is at the middle of the two models on the floor, parallel to the front surface of the overtaken model (named Model A), as shown in Figure 2. Model A is fixed at the center line on the floor of the test section in wind tunnel and Model B is fixed at one of the seven streamwise locations
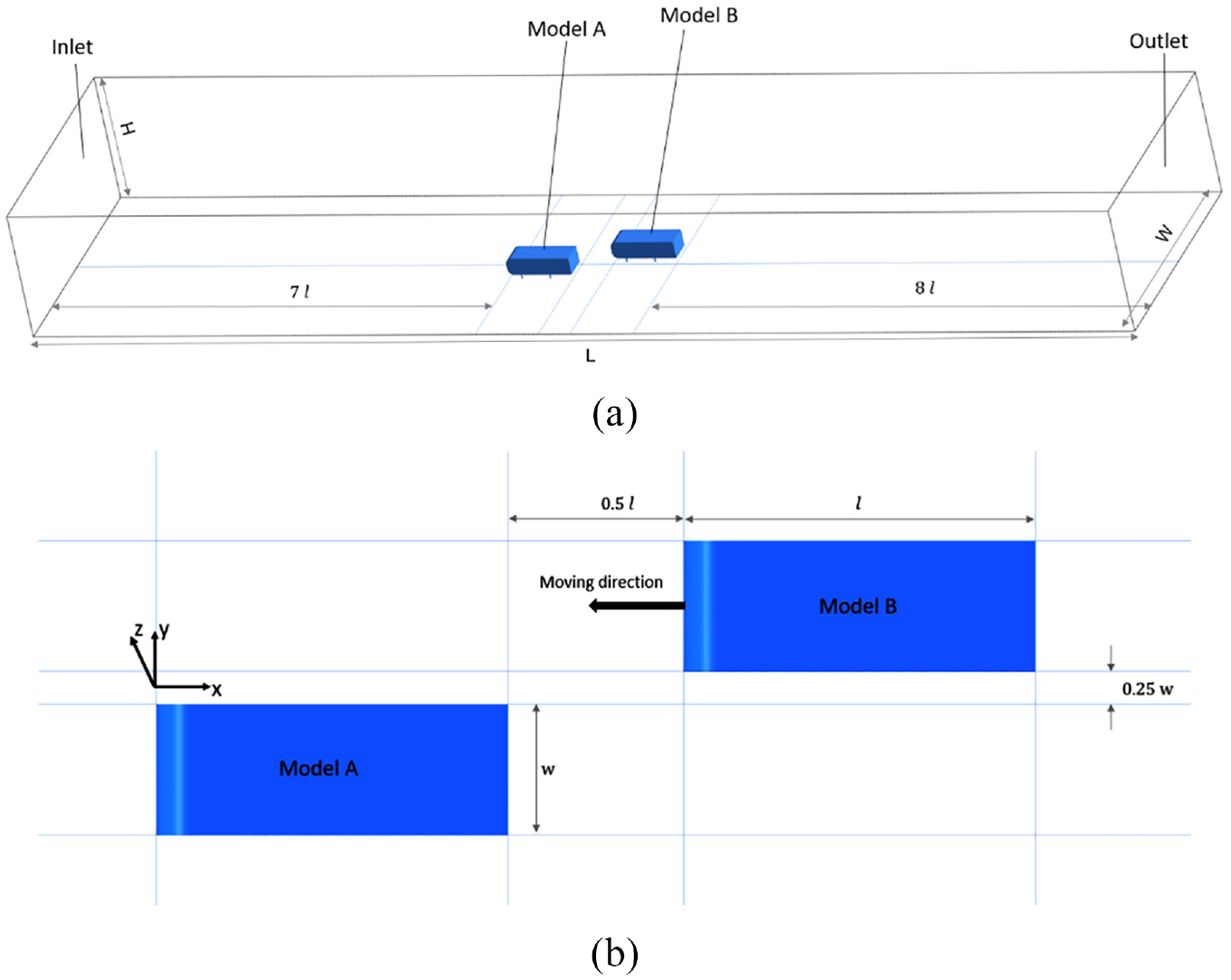
(a) Schematic diagram of the computational domain and (b) top view of the two models for the static test with Model B at x/l = 1.5.
The freestream velocity (
Each ZOC 33/64 px module contains 64 pressure sensors. The full-scale range of the pressure sensor is ±2490 Pa, with an accuracy of ±0.15%. The sampling rate for the pressure sensor is 250 Hz. There are 432 pressure taps distributed on all surfaces, except for the lower surface of Model A (see Figure 1(b)). All the pressure tapings are connected to the pressure scanner using flexible polyvinyl chloride tubes of 1.1 mm in diameter and 0.3 m length. A study by Irwin et al. 26 showed that phase distortions have a minor effect if tube is less than 0.3 m long. 32,768 pressure data readings were collected for each sensor to determine the mean pressure at the tapping position for the experiment.
Numerical method
Numerical simulation of the flow field during overtaking process used a CFD code, ANSYS Fluent, 27 in the study.
Governing equations and turbulence model
The present study uses the transient Reynolds-averaged Navier-Stokes equations for conservation of mass and momentum for a constant air density (ρ) and dynamic viscosity (μ) given as:


where

where
A previous study by the authors
20
showed that the SST

where ε is the dissipation rate for turbulent kinetic energy and
Boundary and initial conditions
The widths of both transverse (y) sides and the top of the vertical (z) side must be sufficiently large to ensure that the boundaries extend into the freestream regions to allow zero-gradient conditions to be applied. The bottom of the vertical side is placed on the floor of the wind tunnel so that the non-slip conditions are valid. In summary,


where



Without the (measured) inlet and outlet conditions, the assumption cannot but be used. The assumed inlet conditions are as follows. The uniform distributions of the mean velocity components, the turbulent kinetic energy and its specific dissipation rate at the inlet are:



These inlet conditions apply to the upstream freestream region, so the flow is close to homogeneous turbulence. The zero-gradient conditions are imposed on all of the solved transport flow properties as the outlet conditions for flow approaching the fully-developed state in the downstream region from the lagging model, that is,

A previous study by the authors
20
showed that the inlet and outlet boundaries for a static test of the undertaking process are at least
The initial condition is specified for the transient simulation of the overtaking process. At the beginning of the overtaking process for the transient simulation for a specific velocity, the overtaking vehicle (Model B) starts from
Computational domain and grid layout
A hybrid mesh using hexahedral cells and tetrahedral cells is used for the computation, as shown in Figure 3. The tetrahedral mesh prism shape (Figure 3(a)) is used at the near-wall regions for models with curved head surfaces and allows the mesh to be generated more quickly. The hexahedral mesh type that is associated with the grid adaption technique is used at the periphery of the tetrahedral mesh (Figure 3(b)). A hybrid computational mesh is generated using ANSYS Meshing code.
29
The remaining space in the computational domain is constructed using hexahedral-type grids. The grid independent test was performed in a previous study by the authors
20
and its result is used for these computations and assures the near-wall grid condition of all
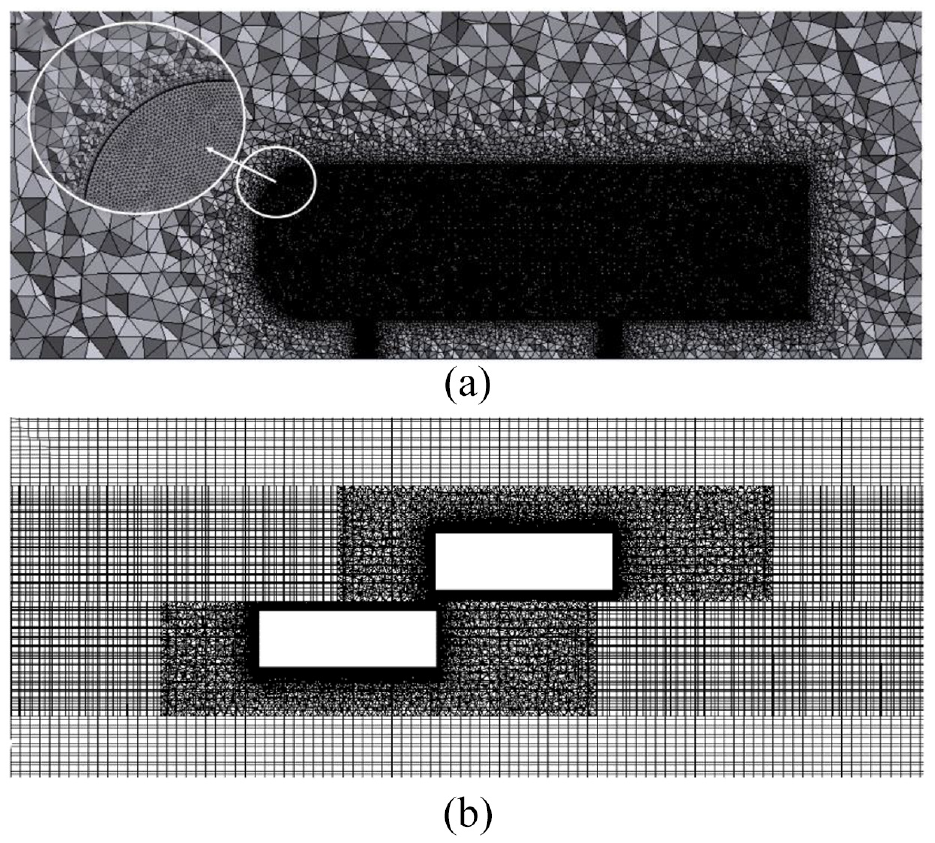
Mesh layout around the models: (a) side view and (b) top view for the static test with Model B at x/l = 1.0.

Sliding meshes for Model B moving to position x/l = (a) 1.5, (b) 0.0, and (c) −1.5 during overtaking process.
The size of the computational domain varies with the simulation. Figure 2 shows the computational domain for the simulation of the static test using Model B placed lagging
Other numerical details
All transport differential equations are discretized using the QUICK scheme.
30
The SIMPLEC algorithm
31
is used to deal with velocity-pressure coupling in the momentum equation, equation (3). The convergence criterion is that the residuals for all solved transport properties in the computational domain must reach their own asymptotic values, so these residual values cannot be further reduced with more iterations (or in every time step for a transient computation). For the transient computation, the time derivative term in equation (3) is discretized using the first-order implicit scheme. The time step (

where
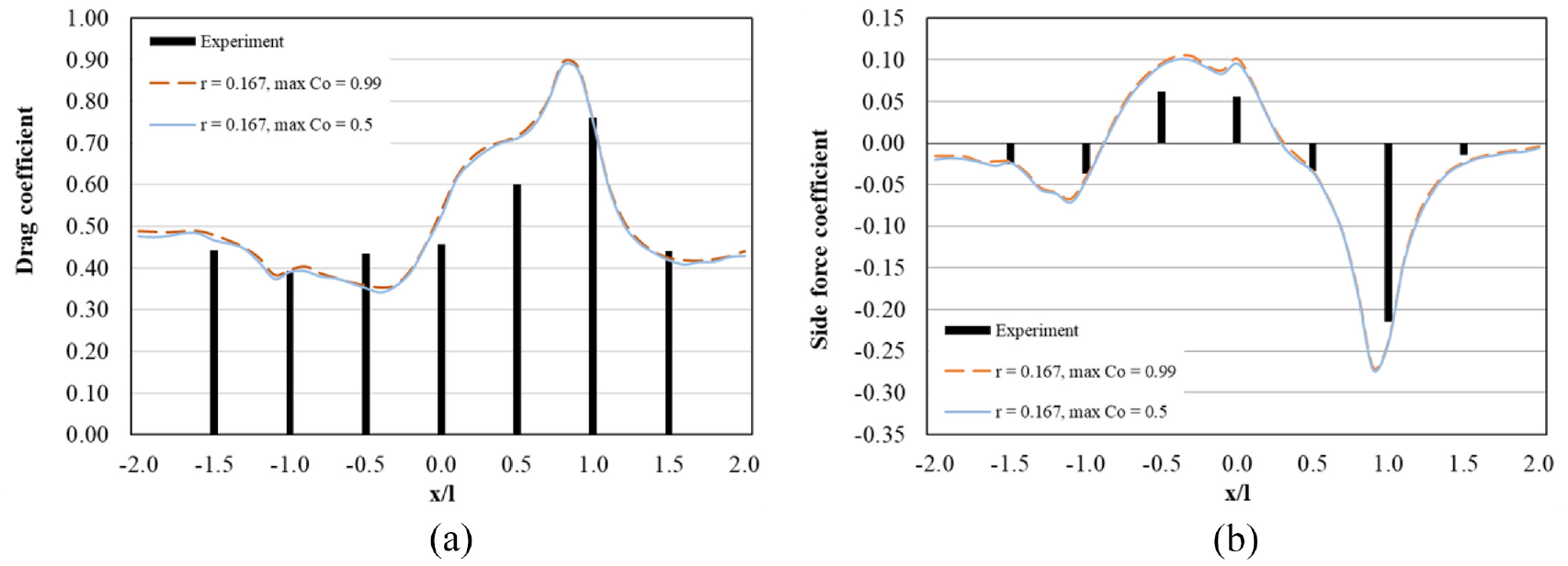
Comparison of the predicted: (a) drag coefficients and (b) side force coefficients on Model A in the overtaking simulation with r = 0.167 under the two CFL numbers.
Results and discussions
Static tests
Seven static tests were implemented experimentally and numerically. Model A was fixed at

where

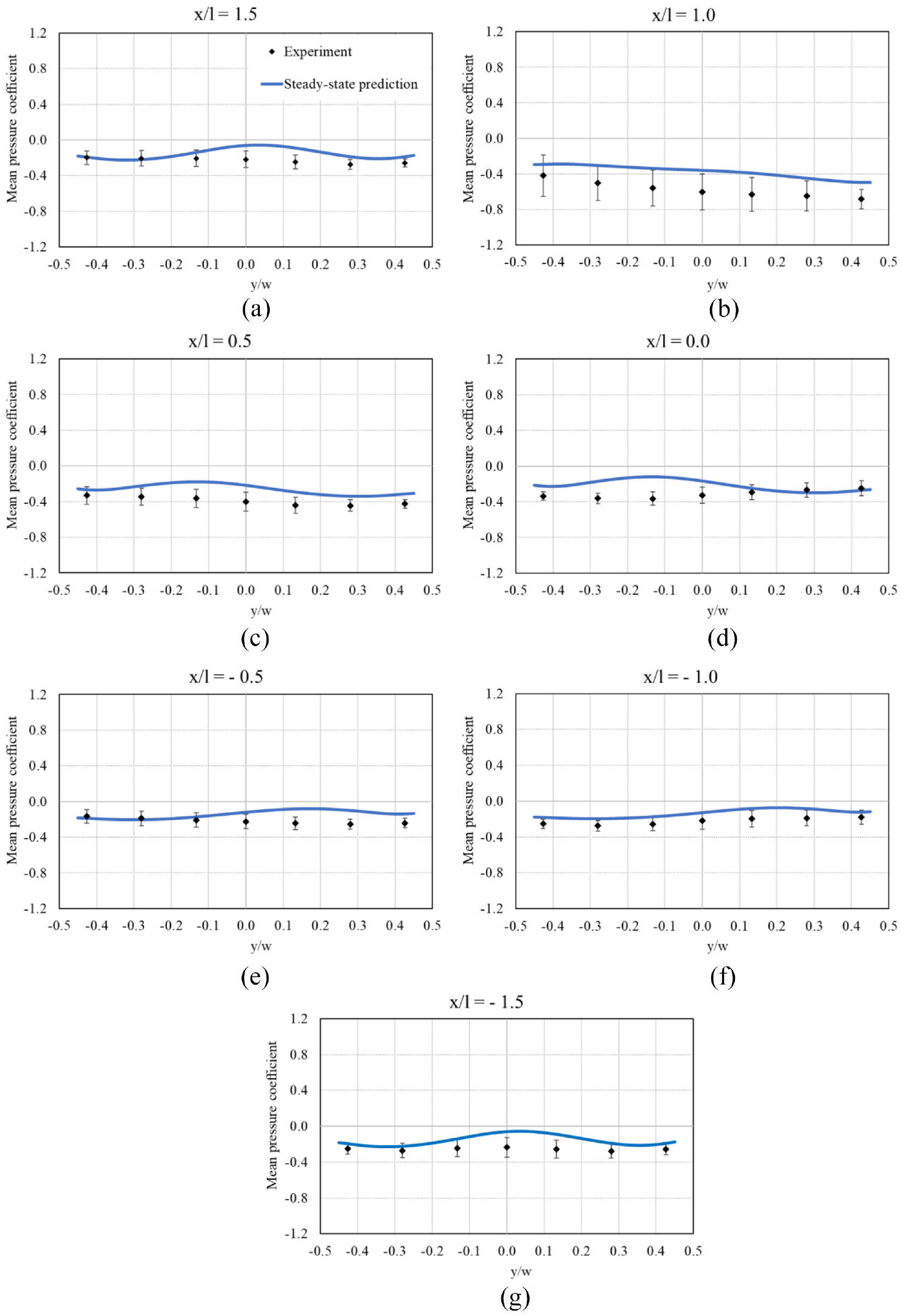
Distribution of mean pressure coefficient along the centerline of the right-hand side surface of Model A for Model B at x/l = (a) 1.5, (b) 1.0, (c) 0.5, (d) 0.0, (e) −0.5, (f) −1.0, and (g) −1.5.

Distribution of mean pressure coefficient along the centerline of the left-hand side surface of Model A for Model B at x/l = (a) 1.5, (b) 1.0, (c) 0.5, (d) 0.0, (e) −0.5, (f) −1.0, and (g) −1.5.

Distribution of mean pressure coefficient along the centerline of the frontal surface of Model A for Model B at x/l = (a) 1.5, (b) 1.0, (c) 0.5, (d) 0.0, (e) −0.5, (f) −1.0, and (g) −1.5.
Distribution of mean pressure coefficient along the centerline of the back surface of Model A for Model B at x/l = (a) 1.5, (b) 1.0, (c) 0.5, (d) 0.0, (e) −0.5, (f) −1.0, and (g) −1.5.
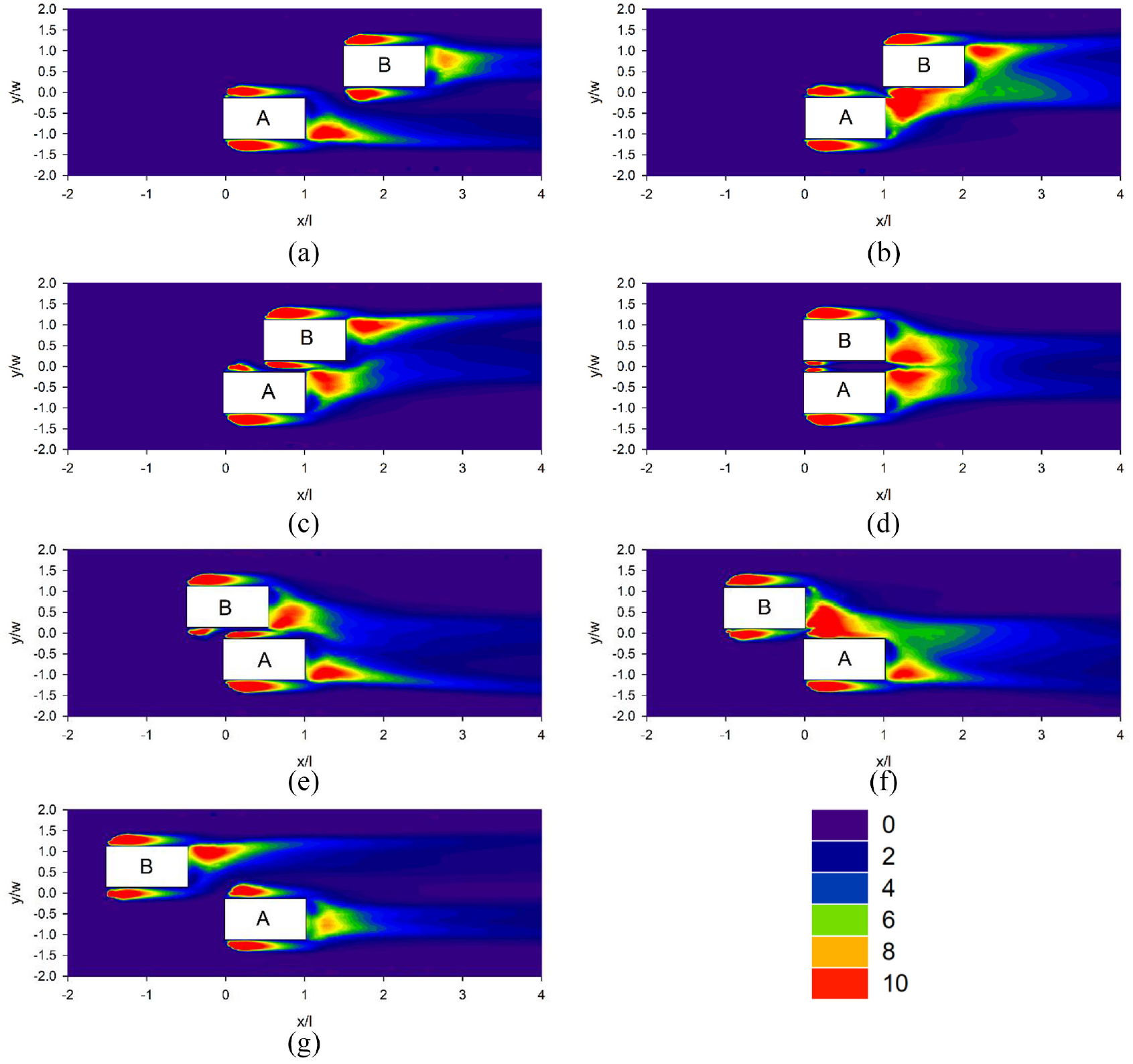
Distribution of the predicted turbulent kinetic energy on the middle planes (i.e. z/h = 0.607) for the two models for all seven static tests: (a) x/l = 1.5, (b) x/l = 1.0, (c) x/l = 0.5, (d) x/l = 0.0, (e) x/l = −0.5, (f) x/l = −1.0, and (g) x/l = −1.5.

Comparison of the measured and predicted drag coefficients for Model A for all seven static tests.
When air passes over a bluff body, such as Model A in Figure 10(a), a boundary layer develops on each side surface. When this boundary layer grows, there is boundary layer separation and reattachment which are nonstationary flow phenomena, so there are significant error bars in the upstream region (
However, the blockage effect of Model B, which is located at the RHS (with the transverse space of
The incoming air impinges on the frontal surface so the value of
The mean drag force coefficient is defined as:

where subscripts “

where subscripts “
The measured and predicted drag coefficients that act on Model A for all seven static tests.

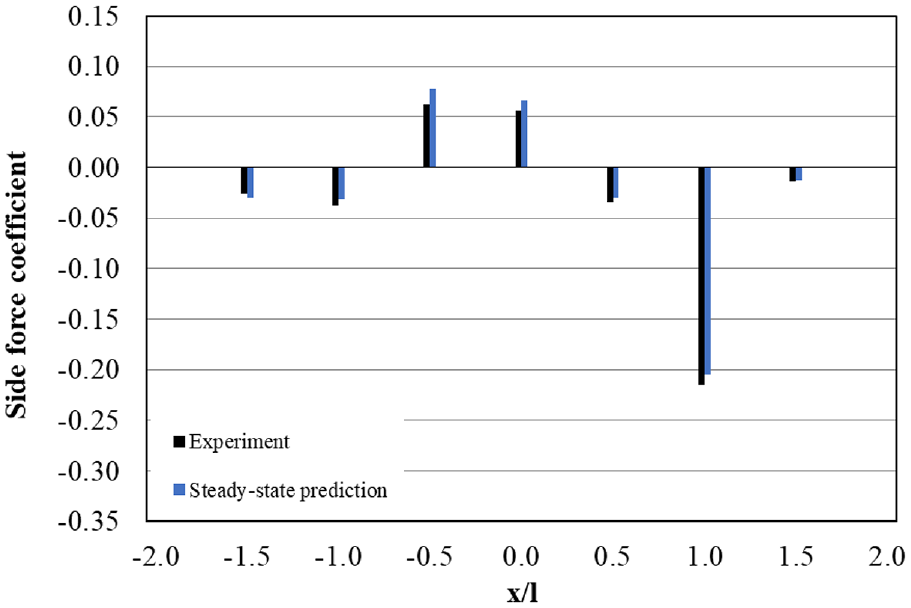
Comparison of the measured and predicted side force coefficients for Model A for all seven static tests.
The measured and predicted side force coefficients that act on Model A for all seven static tests.

Figure 11 and Table 1 show that the blockage effect of Model B on the drag coefficient of Model A (overtaken role) varies significantly for the three static tests at
In terms of the variation of side force coefficient for the overtaking process, the results in Figure 12 and Table 2 show a similar trend to that for the drag coefficient (Figure 11) as the blockage effect from Model B on Model A (overtaken role) for the three static tests for which Model B is at
Comparisons between the predicted and measured distributions for the mean pressure coefficient along the centerlines of two side surfaces are shown in Figures 6 and 7. There is satisfactory agreement, except in complicated subregions where the boundary layer separates and reattaches, which are located in the upstream part of the boundary layers on the surfaces, as shown in Figure 10. However, even in these complicated flow subregions, the predictions are acceptable. The predicted and measured distributions for the mean pressure coefficient along the centerlines of the frontal surface show good agreement, as shown in Figure 8. As mentioned previously, there is a wake with a coherent vortex structure behind Model A, regardless of where Model B is placed. Figure 9 shows that the mean pressure coefficients along the centerline of the back surface are predicted to be greater than the measured results.
The mean drag coefficients and the mean side force coefficients are calculated using the predicted mean pressure coefficients for the seven static tests and the results are respectively shown in Figure 11/Table 1 and Figure 12/Table 2, for comparison with the measured results. The difference between the prediction and experiment for a specific mean force coefficient is calculated as:

The difference between the predicted and measured drag coefficients and the side force coefficients at the seven static tests are calculated using equation (19) and the results are respectively shown in Tables 1 and 2. These differences are small for the blockage effect on Model A (overtaken) due to Model B (see Figure 10(a), (b), and (c)) and large for the wake effect on Model A (overtaking) due to Model B (see Figure 10(e), (f), and (g)). When the two models are parallel (see Figure 10(d)), the boundary layer that develops on the RHS surface and the wake structure behind the back surface of Model A is significantly inhibited by Model B, so the flow phenomena in the neighboring regions of Model A are very complicated. The isotropic assumption that is used to determine the eddy viscosity using the SST
The turbulent wake that is generated behind Model B in Figure 10(e), (f), and (g) features a coherent vortex structure, which is composed of large-scale organized motions and microscale fluctuating motions. The significant difference between the predicted and measured aerodynamic force coefficient for the wake effect can be attributed to use of the SST
RANS models use Reynolds decomposition, which is defined below, for statistical descriptions of a stationary turbulence.

where

where
The numerical study for the turbulent flow field around an Ahmed body conducted by Guilmineau et al.
21
employed the SST
Transient simulations
The results of series of transient simulation involving different overtaking velocities are listed in Table 3. The distributions of the calculated drag and side force coefficients, using the predicted mean pressure coefficients for five values of
The transient simulations for different overtaking velocities.


Comparison of drag coefficients for transient simulations using various overtaking velocities and for static tests.

Comparison of side force coefficients for transient simulations using various overtaking velocities and for static tests.
In general, the variation trends in the predicted values of the transient simulation for
Maximum deviation in the drag and side forces coefficients that act on Model A between for a transient simulation for different r values and obtained for experimental static tests (i.e. r = 0).
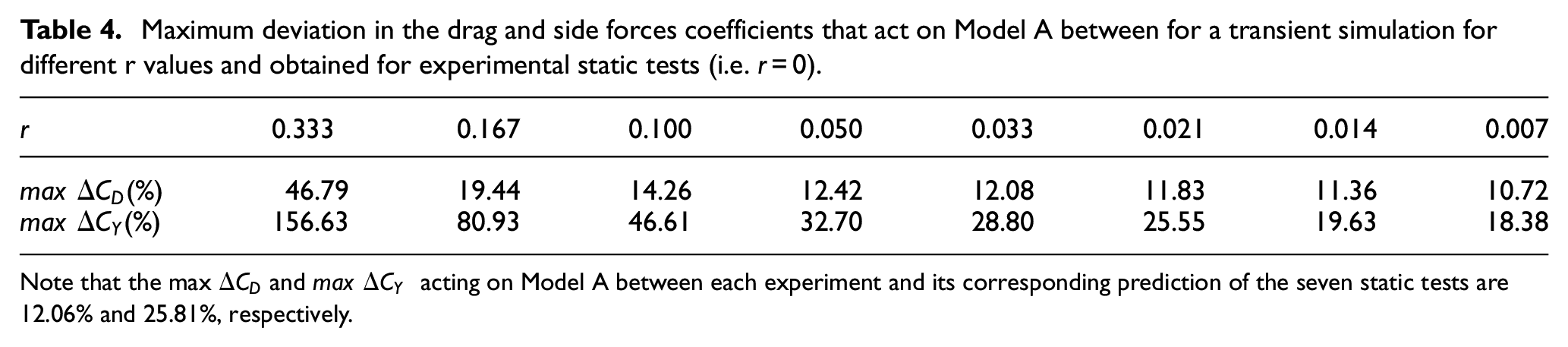
Note that the max
The distributions for turbulent kinetic energy on the middle planes of the two models for the steady-state simulations are mirror images of each other (Figure 10), including those in Figure 10(a) and (g) (for

Distribution of the predicted turbulent kinetic energy on the middle planes (i.e. z/h = 0.607) for the two models at seven different streamwise positions for a transient simulation for which r = 0.333: (a) x/l = 1.5, (b) x/l = 1.0, (c) x/l = 0.5, (d) x/l = 0.0, (e) x/l = −0.5, (f) x/l = −1.0, and (g) x/l = −1.5.
Conclusions
A set of static tests involving the overtaken and overtaking entities is numerically and experimentally studied using two simplified Ahmed body models. Numerical simulations use the SST
A comparison of the drag and side force coefficients for the transient simulations using various relative velocity ratio (
Footnotes
Appendix
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors acknowledge the funding support of the Ministry of Science and Technology of Republic of China under Grant Contract MOST 106-2218-E-0069–18–MY 1 and 2.