
Abstract
The automotive headlight stands out as a critical vehicle component, particularly emphasized during nighttime driving. The high beam, designed for optimal driver visibility on long-distance roads, traditionally relies on manual control by the driver. However, this manual control poses challenges, particularly when the high beam light temporarily blinds oncoming drivers. The resultant dazzle for drivers of opposing vehicles is a significant concern. In response to these issues, there is a growing demand for adaptive and intelligent headlights that can autonomously adjust beam intensity. The intelligent headlight system takes on the responsibility of modifying the beam intensities without requiring explicit input from the drivers. This study aims to systematically review various approaches to controlling intelligent headlight beam intensity. The paper identifies four prominent approaches to intelligent headlight beam intensity control, recognized as widely used techniques. Furthermore, the study uncovers intriguing connections between some of these intensity control approaches. A survey on utilization rates indicates that sensor-based and machine learning (ML)-based intensity control approaches are the most commonly employed methods by automotive headlight designers. The paper concludes by providing insights into the future prospects of intelligent headlight technology, offering guidance for future researchers in this field.
Keywords
Introduction
Automotive headlights serve a crucial role in illuminating the highway and its surroundings during nighttime driving. Given its significance, global regulations mandate institutions, such as the driver and vehicle licensing authority, to inspect and certify the operational condition of headlights for roadworthiness. These inspections involve a thorough examination of the headlight beams and their intensities, ensuring they meet specified minimum standards before certification.1,2 In the pursuit of enhancing passenger and driver safety during nighttime driving, vehicle manufacturers have witnessed a rapid evolution in headlight light sources. From the historical use of candles and lanterns on carriages, the technology has progressed to the current state of intelligent headlights. The evolution in light sources began with tungsten halogen lamps, transitioning to high-intensity discharge (HID) lamps, and now prevalent light-emitting diodes (LEDs). The latest development is steering toward the adoption of Light Amplification by Stimulated Emission of Radiation (Laser) technology. 3 Automotive headlights typically feature two primary light beams: the high beam and the low beam. The high beam is utilized to illuminate distant roads, enhancing driver visibility, while the low beam is employed for illuminating the immediate vicinity of the vehicle in traffic-congested environments. 4
The existing conventional headlight operates on a purely mechanical basis, requiring the driver to manually switch between high and low beams based on road conditions. A significant factor contributing to nighttime road accidents is poor driver visibility, particularly when the high beam of an oncoming vehicle affects the eyes of the driver traveling in the opposite direction. This occurrence results in temporary blindness for the oncoming driver, often leading to head-on collisions, especially on single-lane dual carriageways. Consequently, developing countries, particularly in Africa, consistently experience higher rates of road accidents and fatalities. The World Health Organization consistently reports elevated fatality rates in Africa and other developing nations, reflecting the prevalence of single-lane dual carriageways in these regions. Figure 1 illustrates the divergent intensity pattern of the headlight high beam, capable of reaching distances exceeding 200 m and covering approximately three lanes. A section of this study delves into the distribution of intensity patterns for both high and low beams to provide a comprehensive understanding of their structures. Due to the high beam’s characteristics, improper control can adversely affect drivers from the opposite direction. Motorists with conventional headlights must periodically adjust their high beams based on traffic conditions, a task that becomes more demanding with the growing vehicular population on highways. Continuous adjustments to prevent dazzling other road users during nighttime driving can lead to driver fatigue, a significant contributor to frequent accidents. Moreover, the increase in vehicular population places a heightened demand on drivers to constantly adjust beams, potentially leading to driver fatigue, a major factor in frequent accidents. This repetitive adjustment can also result in driver indifference, allowing the high beam to remain on when encountering oncoming vehicles. Consequently, the imperative for intelligent headlights has arisen to relieve drivers of this control function. The manual control of conventional headlights by drivers is susceptible to misuse.5–7
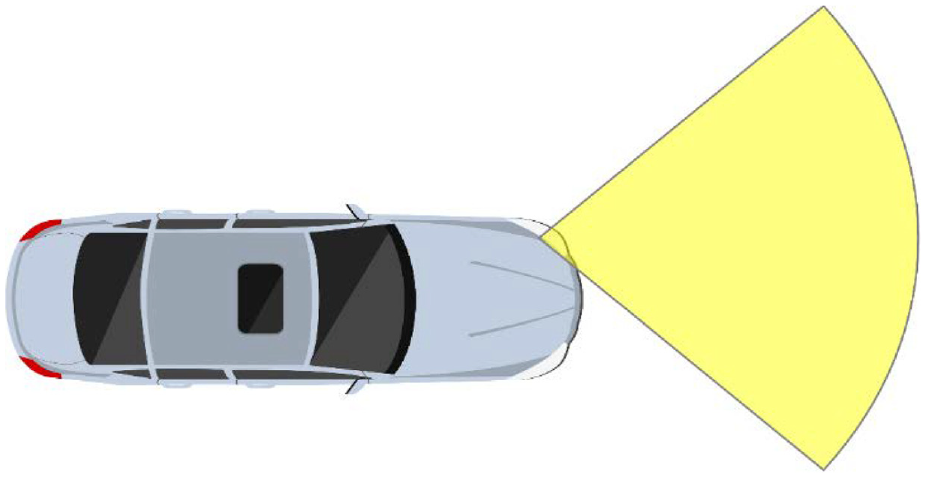
Headlight high beam divergent pattern.
The scenario depicted in Figure 1 has contributed significantly to numerous road accidents worldwide, especially during nighttime driving. According to a report from the World Health Organization, a staggering 70% of road crash fatalities and injuries globally impact the economically productive age group, specifically individuals aged 15–64 years, a demographic predominantly involved in nighttime driving. The fatality ratio within this age group is reported to be 3:1 for males to females, with those aged 15–49 years being particularly susceptible to road fatalities.8–10 To illustrate, the People’s Republic of China, being one of the most advanced and populous nations globally, reported an estimated population of approximately 1,451,886,932. In 2016, China experienced an estimated 212,846 road crashes, resulting in 63,093 fatalities and 226,430 injuries. The economic toll of these road crash fatalities in China amounted to a staggering 1207.6 million Yuan, emphasizing the significant economic impact of road accidents on nations. 11 This highlights a diversion of resources from developmental endeavors to addressing the aftermath of road accidents. In light of these alarming statistics, there is a pressing need to harness recent technological advancements to mitigate the toll of road carnages. Leveraging cutting-edge technology can play a pivotal role in reducing road accidents and their associated economic burdens on nations.
In recent times, the surge in technology and the heightened demand for vehicles have led to an exponential growth in vehicular population, resulting in significant traffic congestion on highways. The escalating number of vehicles globally has imposed substantial strain on road infrastructure and increased the demands placed on drivers. This situation has prompted the development of vehicle components that leverage advanced technology to alleviate the challenges posed by the burgeoning vehicular population.12–16 The integration of high technology into the design of vehicle components aims to enhance aspects such as ride comfort, safety, and vehicle stability. Designing components that simultaneously satisfy these diverse and sometimes conflicting requirements can be a considerable challenge. To overcome these challenges, vehicle components are increasingly incorporating electromechanical subsystems that utilize sensors, actuators, and feedback controls to enhance ride comfort and safety.17–24 Implementing such technological advancements in the design of intelligent headlight systems could significantly mitigate the impact of high beams on road users during nighttime driving. Research on intelligent headlights commenced in the early 2003s to address the limitations of conventional headlights. However, solving the challenges associated with conventional headlights has proven elusive due to differing approaches among researchers. 25 Despite these challenges, the field is rapidly evolving, with expectations of increased investment in intelligent headlight research by numerous automobile companies and research institutions. 26
In addressing the challenges associated with poor management of conventional headlight high beams during nighttime driving, researchers in automotive intelligent headlights are exploring various innovative control approaches. For instance Moon et al., 27 introduced an Intelligent Headlight Beam Intensity Control System (IHBICS) utilizing a machine learning-based approach. Similarly Loong et al, 28 Tamburo et al., 29 presented an Intelligent Night Vision Headlight System for automobiles, employing infrared cameras and a computer vision-based approach. Additionally Bullough et al., 30 devised an IHBICS utilizing an Arduino controller to automatically adjust the car headlight system based on surrounding lighting conditions through a sensor-based approach. These diverse approaches share a common goal: designing intelligent headlights capable of autonomously controlling headlight beams from high to low without requiring the driver’s explicit consent. The objective is to enable drivers of vehicles equipped with intelligent headlights to focus solely on steering control and other tasks that demand their attention. Each approach brings a unique perspective to the challenge, incorporating machine learning, computer vision, and sensor-based methodologies to enhance the safety and efficiency of nighttime driving.
Various researchers have explored a range of headlight beam intensity control approaches, including Pulse Width Modulation (PWM), Fuzzy Logic, wireless sensor networks, and infrared transmitter-receiver systems. In their study Parvin et al., 31 concluded that, considering global research efforts in this field, intelligent headlights are expected to remain a top research area in the future. Anticipated collaborations among commercial vehicle manufacturers, government organizations, and universities are likely to yield significant advancements in this field in the coming years. Additionally, several authors have pointed out that while vision-based vehicle detection has made significant progress over the past decade, achieving a deeper and more comprehensive understanding of the on-road environment will continue to be an active area of research in the future. 32 Despite the high research interest in intelligent headlights, the lack of a unified approach has led to some confusion in the sector. The primary objective of this paper is to conduct a comprehensive review of common intelligent headlight beam intensity control approaches. The aim is to provide guidance for future researchers in understanding the trajectory of intelligent headlight technology, fostering coherence in the pursuit of advancements in this crucial area.
The paper follows a structured organization, with Section 2 providing a comprehensive literature survey of intelligent headlight beam intensity control approaches and a utilization rate survey comparing commonly employed methods. In Section 3, the intensity pattern curves distribution of both high and low beams of the headlight is reviewed. Section 4 delves into the discussion of findings from the review study. The concluding remarks are presented in Section 5, and the paper closes with Section 6, offering acknowledgments. Figure 2 illustrates the overall organizational flow of the review paper. This structured arrangement ensures a systematic exploration and presentation of the research on intelligent headlight technology.

Structure of the review paper.
Literature survey
It is evident that intelligent headlight design has become a focal point of research, with many studies focusing on utilizing headlights for object detection, vehicle-to-vehicle communication, and traffic control management to mitigate road accidents. However, the primary cause of accidents during nighttime driving remains poor driver vision. Various factors contribute to this, including adverse weather conditions, dusty environments, fog, and, notably, glare from the high beams of oncoming vehicles. The frequent occurrence of poor driver visibility, especially due to glare from opposite vehicles, is a significant contributor to nighttime accidents. To address this issue, the proposed solution is the development of intelligent and adaptive headlight systems capable of autonomously managing headlight beams. This perspective aligns with the viewpoint expressed by Fleming. 33 While intelligent and adaptive headlight technology is a subject of significant research interest, the focus appears to be directed in a different direction. Rather than developing systems that take control functions away from drivers, much attention is given to using headlights for vehicle detection, tracking, and communication between vehicles, as suggested by Shun-Hsiang Yu 34 This entails diverting the headlight’s purpose from its core function of providing clear illumination for optimal driver visibility during nighttime driving. Moreover, the few studies that do aim to design intelligent headlights to enhance their core functionality often employ varied beam intensity control approaches. This diversity creates concerns for vehicle manufacturers, as the lack of a standardized approach raises questions about which intensity control method to adopt. The need for a more focused and standardized approach to intelligent headlight design is highlighted to ensure that advancements align with the primary goal of improving driver visibility and reducing nighttime accidents.
Several examples highlight the diversity of approaches in designing intelligent headlight systems. For instance Erzheng et al., 35 developed a system using Micro-Electro-Mechanical Systems (MEMS) and a digital signal processor to control the headlight beams’ angle. In another study Li et al., 36 designed an intelligent headlight system incorporating modules for information collection, data transmission, data processing, and a motor adjusting the range of vision based on vehicle speed to enhance active safety. Similarly, an intelligent headlight system was created with two Electronic Control Units (ECUs) linked by a Controller Area Network (CAN). One ECU featured a biometric fingerprint security system for vehicle ignition, while the other had an auto mode wiper movement based on a fuzzy logic algorithm and an automatic headlight system to minimize glare. 37 The use of a piezoelectric motor as an actuator for dynamic headlight leveling was explored as a potential future step in automotive lighting. 38 Authors in Sushmita Pal 39 implemented an intelligent headlight system that improves road visibility and adjusts the headlight in hilly and curved terrains using an Arduino-based conventional headlight with multi-traits. This diverse literature showcases the various methods and approaches employed by designers of intelligent headlight systems. In the next section, a comprehensive review is conducted to determine the headlight beam intensity control approaches adopted by different designers. Some commonly used approaches are illustrated in Figure 3, depicting the evolution of intelligent headlight beam intensity control technology from its inception to the current state and future outlook. The following section provides an overview of each approach, and Table 1 summarizes their strengths and limitations.
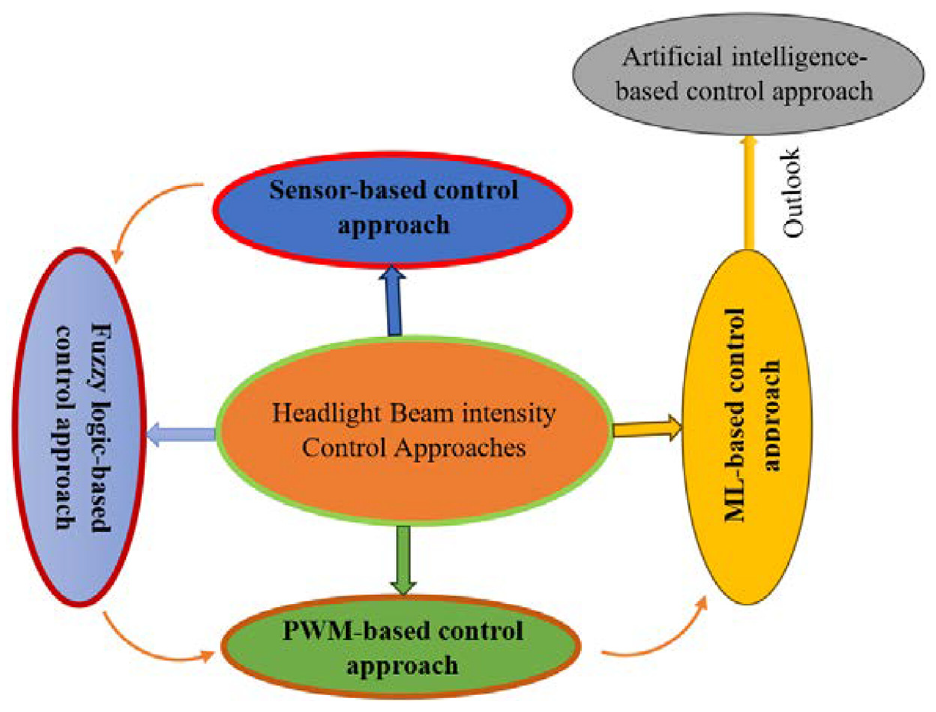
Headlight intensity control approaches.
Strengths and limitations of headlight beams intensity control approaches.

Overview of sensor-based control approach
The sensor-based intensity control approach stands out as one of the oldest and widely adopted methods by developers of automotive intelligent systems, particularly in the context of intelligent and adaptive headlight beam intensity control management. This approach employs sensors, often utilizing light-dependent resistors (LDR), in conjunction with microcontrollers to control system operations. LDR sensors play a key role in this approach, detecting light intensity levels in the surrounding environment. When exposed to light, the LDR sensor develops high resistance, impeding the flow of electrons. Conversely, in a dark environment, the LDR sensor exhibits low resistance, allowing a greater flow of electrons. The output from the LDR sensor, indicating the detected light intensity, is then transmitted to a microcontroller, such as an Arduino UNO control board, for interpretation. In addition to LDR sensors, distance measurement sensors, such as ultrasonic and radar sensors, are often integrated into sensor-based headlight beam intensity control systems. These distance measurement sensors calculate the distance between two moving vehicles, providing crucial information for the system’s decision-making process. Researchers, such as Jadhav et al., 40 have implemented intelligent headlight systems using the sensor-based intensity control approach. In their system, the LDR output voltage is fed to a transistor for signal amplification before being transmitted to a relay. The relay serves as an actuating device, facilitating the switching between high and low beams. Relays play a pivotal role in intelligent headlight beam intensity control systems, enabling the essential function of switching between different beam modes. In summary, the sensor-based intensity control approach, relying on LDR sensors and microcontrollers, remains a fundamental and widely utilized method in the development of intelligent headlight systems. The incorporation of distance measurement sensors and relays further enhances the capabilities of these systems in managing headlight beams based on environmental conditions and driving scenarios.
In a related context, Németh et al. 41 proposed a headlight intensity control approach based on dual-pixel Active Pixel Sensor (APS) sensor architecture, specifically designed for vision-based speed measurement applications. This innovative approach utilized a novel double exposure method, integrating two types of imaging elements on the pixel level to generate two spatially and temporally coherent images. The primary sensor was dedicated to producing a high-quality image for vehicle identification, while the secondary sensor’s output was employed to calculate speed estimates based on the intra-frame displacement of the vehicle’s headlight. A scaling process was implemented to adjust the sensitivity of the secondary sensor, relying on photodiode parasitic capacitor discharge time. While existing intelligent headlight-enabled cars are often considered expensive and inaccessible to the average consumer, 42 addressed this concern by designing a low-cost intelligent headlight system for accident avoidance. Adopting the sensor-based headlight beam intensity control approach, the system employed various sensors, including an LDR sensor for measuring light intensity, a Doppler radar sensor for rain measurement, an optical fog sensor for fog detection, a Video Image Processor (VIP) sensor for vehicle identification, and an ultrasonic sensor for measuring the distance to oncoming vehicles. These sensors were integrated into an Arduino Uno (R3) microcontroller. The author successfully achieved a more cost-effective design compared to existing intelligent headlight systems in luxury cars such as BMW, Mercedes, and Audi. This example highlights the practicality of employing a sensor-based headlight beam intensity control approach not only for its technical advantages but also for its potential in making intelligent headlight technology more affordable and accessible to a broader range of vehicle manufacturers and consumers.
In a similar fashion Muhammad and Shahriar, 43 utilized the sensor-based intensity control approach for their headlight beam intensity control system, affirming the efficiency of this method. Their design was centered around an ambient light sensor (ALS) based on a phototransistor, employing the principle of pulse width modulation. They asserted that their proposed approach is a highly effective method for controlling the headlight beam intensity of a vehicle. Ensuring good visibility on the road is crucial for safe nighttime driving, and the sporadic use of high beams due to the fear of dazzling other drivers underscores the significance of automatic headlight control. López et al. 44 addressed this challenge by using a novel image sensor suitable for driver assistance applications, overcoming limitations associated with camera-based approaches. These examples illustrate how various authors have employed the sensor-based intensity control approach in designing automotive intelligent headlights for nighttime driving environments. Despite being one of the oldest approaches, it remains a preferred choice in contemporary intelligent headlight system designs due to its simplicity in architectural construction, cost-effectiveness, and reliability. Sensors, as mechatronic components, offer widespread applications, are highly reliable, and contribute to cost reduction when integrated into systems. The enduring popularity of the sensor-based intensity control approach in modern intelligent headlight designs attests to its ease of use and continued effectiveness.
Overview of fuzzy-logic-based control approach
The fuzzy-logic-based headlight beam intensity control approach represents a newer control methodology following the sensor-based intensity control approach. This approach is conducive to development using software tools like MATLAB. It has been employed by intelligent headlight beam intensity control developers such as Kher and Bajaj. 45 In their design, a fuzzy logic controller was utilized to adjust the intensity of the headlight beams. To enhance the effectiveness of the headlight, they proposed an automated fuzzy controller that optimizes illumination in a manner that minimizes glare for oncoming vehicle drivers. This approach leverages fuzzy logic, a mathematical framework that simulates human reasoning to make decisions based on imprecise or uncertain information.
The fuzzy-logic-based headlight beam intensity control approach, while sharing similarities with the sensor-based approach in its reliance on sensors for operation, differs in its mode of control. In the sensor-based intensity control approach, Arduino and transistors are central to control, whereas the fuzzy-based intensity control approach utilizes a fuzzy controller. The proponents of the fuzzy-based intensity control approach argue that a fuzzy controller is more reliable, providing more accurate output signals. To design an intelligent headlight system that dynamically controls the headlight beams without the driver’s intervention Uma et al., 46 employed a fuzzy controller. Their proposed system dynamically varied the headlight beam width, angle, and intensity by considering various vehicular parameters such as steering position, inclination angle, and speed, along with ambient parameters like day/night cycle and glare from opposite headlights. They designed two types of Fuzzy Inference Systems (FIS): a Centralized FIS (CFIS) that acquired all sensing parameters for headlight illumination control, and a Decentralized FIS (DFIS) for each control parameter to reduce complexity and errors in the system. The versatility of fuzzy controllers extends beyond headlight control. In a study by Kayabasi et al. 47 fuzzy logic technology was employed to design a wiper system that adjusts wiper movement based on rain intensity, controls headlight brightness according to external darkness, and operates the air conditioner based on temperature values. The results indicated that fuzzy logic can efficiently control electric/electronic systems in vehicle applications, showcasing its viability for headlight beam intensity control. The fuzzy-logic-based approach proves to be a viable method for headlight beam intensity control, offering reliability, accuracy, and versatility in integration with other vehicle components.
Various authors have successfully employed fuzzy controllers for headlight beam intensity control, achieving positive outcomes. In one instance, an automatic wiper and headlight intensity control system utilized a fuzzy control algorithm to adjust the wiper speed based on rain intensity and change the headlight modes according to the light intensity from oncoming vehicles. The fuzzy controller in this design consisted of three components: Fuzzification, Fuzzy Logic Rule Base, and De-fuzzification. Fuzzification converted the physical values of the current process signal and error signal, the Fuzzy Logic Rule Base utilized a set of rules incorporating several variables, and De-fuzzification converted fuzzy terms created by the rule base into crisp terms or numerical values, as described by Myo Tun. 48 The study concluded that the fuzzy controller excellently executed the parameters set for control. In another study, Lukacs et al. 49 presented adaptive front light system (AFS) control alternatives using fuzzy logic (types 1 and 2) to determine operating parameters, considering road conditions in the state of São Paulo, Brazil. The fuzzy logic control technique, or modeling strategy, proved valuable when making multi-parameter decisions or decisions based on human knowledge. The authors concluded that their results demonstrated the potential of the proposed methodology and its suitability for headlight beam intensity control, contributing to safer nighttime driving. These examples reinforce the efficacy of fuzzy controllers in diverse applications for headlight beam intensity control, showcasing their adaptability and effectiveness in providing solutions for safer driving conditions during nighttime.
In an effort to eliminate accidents caused by temporary driver blindness, a fuzzy controller was designed based on data captured using a Wireless Sensor Network (WSN). The low latency of this system allows for quicker adjustment of headlight intensity to minimize temporary blindness. Multiple attributes were considered in the design of the fuzzy controller, and the results demonstrated that the fuzzy controller’s output is nearly instantaneous, providing continuous control signals, as demonstrated by Nutt et al. 50 Similarly, Sinitsina and Yaroslavtsev 51 designed a Fuzzy Logic system for in-vehicle control, adjusting parameters for various driving behaviors such as normal driving, acceleration, deceleration, lane changes, zigzag motion, and approaching a car in front. Fuzzy rules associated with these behaviors indicated the level of risk, and experimental results showed an average detection ratio of 95%, suggesting the potential for improving traffic safety. A control system mechanism based on fuzzy logic, incorporating reasonable control rules, was presented by Butt et al. 52 Their aim was to explore the role of genetic algorithms in enhancing the efficiency of a fuzzy logic-based rear-end collision avoidance scheme. Results from the control mechanism indicated that the fuzzy controller is reliable and has diverse applications, making it a probable candidate for use by more designers. The versatility of fuzzy controllers extends to controlling electronic systems for object detection, as demonstrated by Basu et al. 53 They designed a nighttime vehicle detection system for adaptive headlight beams and collision avoidance using fuzzy logic-based control for vehicle detection. The system incorporated a novel segmentation technique based on adaptive fuzzy logic, a statistical mean intensity measure, a “confirmation-elimination” based classification algorithm, and a mutually independent feature-based object detection algorithm based on correlation matrix generation for identified light objects in the scene.
The literature discussed highlights the significance and versatility of fuzzy controllers in various engineering applications. It becomes evident that the fuzzy controller can be applied across diverse fields within engineering to control systems effectively. Based on the presented information, it can be confidently stated that the fuzzy-based intensity control approach represents an improvement over the sensor-based intensity control approach. A clear connection has been established, indicating a strong linkage between the two approaches. The primary distinction lies in their modes of control, with the fuzzy-based approach offering enhanced control capabilities.
Overview of PWM-based control approach
Pulse-width modulation (PWM) is a control technique commonly used in motor control, where energy is delivered through a series of pulses rather than a continuously varying (analog) signal. The controller regulates energy flow to the motor shaft by adjusting the pulse width, either increasing or decreasing it. The motor’s inherent inductance serves as a filter, storing energy during the cycle and releasing it at a rate corresponding to the input or reference signal. In essence, energy flows into the load not precisely at the switching frequency but at the reference frequency, as discussed by Tripathy, 54 Khachane and Shrivastav. 55 Pulse-width modulation is also employed in headlight beam intensity control technologies. This control approach provides a convenient means of managing large components. It transforms a digital signal into an analog signal by adjusting the timing of how long it stays ON and OFF. In the context of pulse width modulation intensity control, the term commonly used is “duty cycle.” This term refers to the percentage or ratio of how long the system stays ON compared to when it turns OFF.
The PWM approach has been employed by designers of intelligent headlight systems to control headlight beam intensities. In a study by Umar et al. 56 an LED-based intelligent headlight was presented. The authors designed a boost-type DC-DC automatic switching converter with a pulse width modulation (PWM) dimming controller. They utilized the MATLAB Simulink simulation package to ensure that their system’s performance met the desired parameters. Similarly, in a work by Gacio et al. 57 a new approach was presented with the capability of pulse width modulation (PWM) dimming operation added to the high-power factor-integrated buck-flyback converter (IBFC). This converter had been developed in previous works for LED lighting applications. The authors introduced the two main dimming techniques, namely, analog dimming and PWM dimming. They discussed the three main PWM dimming schemes: enable dimming, series dimming, and parallel dimming. Following this, the IBFC topology was tested for both analog and enable dimming. The authors then introduced a newly proposed technique: the high-frequency series PWM dimming technique. This technique overcame challenges faced when developing PWM dimming capabilities in low slew-rate constant-current fixed-frequency-controlled converters and offered all the advantages of PWM dimming over analog dimming while maintaining good efficiency.
Additionally, a comparison of intelligent and advanced speed control methods based on the PWM technique and PI controller to achieve maximum intensity control efficiency was presented. The simulation of the design was carried out in a MATLAB environment, and results were investigated for speed control of headlight beam intensity without any controller and with a PI controller under full load conditions. The field test showed that the PWM headlight intensity control technique is the fastest compared to other approaches, as indicated by studies by Singh et al., 58 Tripathi et al. 59 Furthermore, a driving circuitry system for high-resolution, pixelated-LED automotive headlights was introduced by Jeon et al. 60 The system comprises an array of pixel drivers and a row/column driver suitable for an active-matrix array configuration with individual dimming control capabilities on each pixelated LED. An asynchronous serial communication protocol was introduced to minimize the number of data transmission interface signals between the row/column driver and pixel drivers. The proposed pixel driver was designed to drive each pixelated LED with constant current and pulse width modulation (PWM), containing a memory cell for dimming data and a sample-and-hold driver stage to minimize static power consumption of the pixel driver.
The study by Beguni et al. 61 focuses on enhancing the Visible Light Communication (VLC) system through improvements in the VLC transmitter. The concept relies on Light-Emitting Diode (LED) current overdriving and a modified Variable Pulse Position Modulation (VPPM). LED current overdriving aims to provide the VLC receiver with higher instantaneous received optical power and an improved Signal-to-Noise Ratio (SNR). Simultaneously, the use of VPPM ensures that the VLC transmitter adheres to eye regulation norms and safeguards the LED against overheating. The experimental testing conducted in laboratory conditions affirmed the viability of the concept, revealing an increase in communication range by up to 70% while maintaining the same overall optical irradiance at the VLC transmitter level. This innovative approach holds promise for achieving vehicular VLC ranges that meet the requirements of communication-based vehicle safety applications. The utilization of Visible Light Communication in controlling headlight beam intensity represents a novel and actively researched area, offering potential advancements in communication technology.
Indeed, pulse width modulation (PWM) is a widely used and cost-effective approach for controlling components in various systems, including intelligent headlight beam intensity control systems. Its convenience in controlling large components and its applicability to ON/OFF switching, such as in the case of switching between low and high beams, makes it a suitable choice in certain contexts. The use of MATLAB Simulink software for program generation further enhances its accessibility, especially in academic or theoretical applications. However, there might be limitations when it comes to the practical implementation of PWM for real headlight beam control. Real-world factors, such as the complex dynamics of driving environments, variations in road conditions, and the need for rapid and precise adjustments in response to dynamic situations, could pose challenges to the straightforward application of PWM in intelligent headlight systems. The choice of headlight beam intensity control approach often depends on a balance between theoretical effectiveness, practical feasibility, and cost considerations. Researchers and developers need to carefully evaluate these factors to ensure that the chosen approach aligns with the specific requirements and constraints of real-world driving scenarios.
Overview of ML-based control approach
Machine learning, a technique rooted in artificial intelligence and computer science, revolves around utilizing data and algorithms to emulate human learning processes. In the contemporary era, machine learning and artificial intelligence stand as fundamental technologies driving the Fourth Industrial Revolution (4IR or Industry 4.0). This approach has permeated the automotive industry, with developers of intelligent components, such as intelligent headlights, leveraging machine learning to control beam intensities. The machine-learning-based intensity control approach represents one of the latest advancements in headlight beam control, proving to be a game-changer widely adopted by numerous designers and major automotive manufacturing companies. For instance, a dynamic headlight model was introduced by Yaşar Şahiän and Akar. 62 employing camera-supported machine-learning algorithms to enhance drivers’ vision during nighttime driving. This design addresses various issues, including establishing a lighting field supported by image processing programed with machine learning. It incorporates dynamic adjustments of the high beam of the headlights’ LED cells in response to oncoming vehicles, a traffic-sign recognition system, a lane-keeping system, and automatic adjustments of headlight angles, all achieved through the application of machine learning technology.
The practicality of the machine-learning-based approach in intelligent headlight design is widely acknowledged, with many current studies adopting this methodology. In the work by Astuti et al. 63 an innovative intelligent headlight system was devised using a unique machine learning-based method known as voice-based recognition. This system confronted the driver through voice-based interactions, allowing the driver to utter a specific word recognized by the system. This word served as input to the voice-based recognition system, which then determined whether the signal indicated a “high beam” or a “low beam,” consequently controlling the car headlights. However, it is crucial to note that the machine-learning-based intensity control approach heavily relies on clear photographs from cameras for accurate performance. Any blurriness in the input images can result in mismatches when compared to preprogrammed images, posing a significant limitation to this approach. Additionally Leung et al., 64 highlighted certain challenges associated with the machine-learning-based headlight beam intensity control approach and object detection models, particularly in nighttime and low illumination conditions. They identified issues related to dataset collection and labeling conventions. Public datasets used for object detection are often captured in well-lit conditions, and labeling conventions typically focus on clear objects, neglecting blurry and occluded ones. Consequently, the performance of traditional vehicle detection techniques is constrained in nighttime environments lacking sufficient illumination. This limitation can impact the efficiency and effectiveness of machine learning technology in applications like intelligent headlight systems.
The machine-learning-based approach can be categorized into various types, including support vector, AdaBoost, and others, depending on the preferences and convenience of the designer. In Zhu et al. 65 the authors introduced a novel algorithm that directly extends the machine-learning technique known as the AdaBoost algorithm into the multi-class case without transforming it into multiple two-class problems. This multi-class AdaBoost algorithm functions as a forward stagewise adaptive modeling algorithm, minimizing a novel exponential loss designed for multi-class classification. The authors demonstrated that this exponential loss belongs to a class of Fisher-consistent loss functions tailored for multi-class classification. Notably, their algorithm is straightforward to implement and exhibits high competitiveness in terms of misclassification error rates. Similarly, in their pursuit of a machine-learning-based approach for vehicle detection and headlight beam intensity control, authors in Moghimi et al. 66 emphasized that vehicle detection is a technology aimed at locating and representing the size of vehicles in digital images. This technology is crucial for detecting vehicles in complex environments with other objects like trees and buildings, playing a significant role in various computer vision applications such as vehicle tracking and traffic scene analysis. The authors proposed using the Viola-Jones boosting technique for vehicle detection and tested their system in real surveillance video scenes under different lighting conditions. Experimental results demonstrated that their vehicle detection method outperformed previous techniques in terms of accuracy (about 94%), completeness (92%), and overall quality (87%). They concluded that their approach is robust and efficient for detecting vehicles in surveillance videos, particularly for applications like headlight beam intensity control.
In a recent study by Bell et al. 67 a machine-learning-based technology was implemented, specifically focusing on a real-time vehicle detection algorithm designed for nighttime driving scenarios. This system demonstrated the capability to identify vehicles in images by analyzing intricate light patterns, forming the foundation for headlight beam intensity control. To achieve this, the authors devised a novel machine learning framework based on a grid of foveal classifiers. This machine learning technology represents the latest advancement in intelligent headlight beam intensity control designs, and numerous vehicle manufacturers have, and continue to, rely on this technology for their intelligent headlight designs. While the technology has proven its superiority over other alternatives, its current application is largely confined to high-end vehicles. However, it is highly plausible that, with the ongoing technological advancements, the cost barrier associated with vehicles equipped with machine-learning-based intelligent headlights will diminish in the near future.
Outlook of intelligent headlight technology
Having traced the evolution of intelligent headlight beam intensity control approaches, from the sensor-based method to the current ML-based approach, it is evident that the intelligent headlight technology is advancing rapidly. A comprehensive review of the four most commonly used headlight beam intensity control approaches leads the authors to confidently project that artificial intelligence (AI)-based headlight beam intensity control is a plausible future development. Presently, weak AI technologies, such as Machine Learning, have already found their place in intelligent headlight system designs, standing as the state-of-the-art technology in this domain. While acknowledging the strengths and limitations of each approach, the authors emphasize the potential for further enhancing the sensor-based headlight beam intensity control method. Sensors, known for their reliability and resilience in harsh environmental conditions, have the capacity to withstand adverse weather, a common challenge for many intelligent headlight technologies. The authors contend that with technological improvements, the sensor-based approach could become as efficient as ML-based technology. Looking ahead, the authors express optimism about the future of automotive intelligent headlight technology, foreseeing the gradual emergence of strong AI, also known as artificial general intelligence, in headlight design. Artificial general intelligence, akin to a human’s problem-solving ability, has the potential to enhance the efficiency and reliability of headlight systems. The authors anticipate the exploration of a research direction leading to “robotic eye” headlights – headlights capable of independently reading the road environment and making decisions, mimicking human eye actions. This technology could significantly contribute to addressing, if not eliminating, road accidents caused by improper conventional headlight use. In conclusion, the authors anticipate that research institutions and organizations will explore the direction of “robotic eye” headlights to make this vision a reality. The subsequent section of the study involves a utilization rate survey to determine the most widely used approach from 2018 to 2022.
The utilization rate survey
The comparison of the approaches was done to determine which of the control approaches is widely used by authors and designers. The selection of authors did not follow any structured criteria but was randomly selected from a pool of articles. It can be observed from the chart as shown in Figure 4 that the five (5) authors representing 100% who designed intelligent headlights in 2018 adopted the sensor-based intensity control approach to manage the automatic switching of the headlight beams intensity from high to low. In 2019, the twelve (12) sampled authors who implemented automatic headlight beam intensity control strategies, mainly adopted sensor-based and machine-learning-based intensity control approaches. In contrast, nine (9) authors representing 75% utilized the sensor-based headlight beam intensity control approach,68–73 while three (3) authors representing 25% used the machine-learning-based headlight beam intensity control approach to manage the intelligent headlight beams intensities.26,74,75 Furthermore, in 2020, the sampled number of authors who conducted a study on intelligent headlight beam intensity control were nine (9), out of which seven (7) authors representing 78% utilized the machine-learning-based headlight beam intensity control approach,31,62,76–79, one (1) author representing 11% adopted the sensor-based headlight beam intensity control approach, 42 and the remaining one (1) author representing 11% utilized the fuzzy-logic-based headlight beam intensity control approach. 80 Similarly, in 2021, of the eight (8) sampled authors who conducted a study on intelligent headlight beam intensity control and design of intelligent headlight, five (5) authors representing 62.5% used the sensor-based headlight beam intensity control approach,5,43,81,82 and the remaining three (3) authors representing 37.5% used the machine-learning-based intensity control approach in the design of the intelligent headlight.31,83,84 In 2022 out of the ten (10) sampled authors who conducted a study into the design of intelligent headlights, seven (7) authors representing 70% adopted the machine-learning-based headlight beam intensity control approach,75,83,85–88, two (2) authors representing 20% utilized the sensor-based headlight beam intensity control approach, 40 and the remaining one (1) author representing 10% used the pulse width modulation approach for the design of the intelligent headlight. 89

Comparison of the most used headlight beam intensity control approaches.
Figure 4 illustrates that the predominant approaches for controlling intelligent headlight beams are machine-learning-based and sensor-based intensity control methods. According to the data presented in Figure 4, out of the 44 authors who contributed to the field of intelligent headlight beam intensity control between 2018 and 2022, 22 authors (50%) employed sensor-based control for designing vehicle intelligent headlights. Additionally, 20 authors (45.5%) opted for machine-learning-based control, while the remaining two authors (4.5%) divided their focus between pulse width modulation and fuzzy-logic based intensity control methods. The analysis reveals that the sensor-based intensity control approach is currently the most prevalent. However, it is noteworthy to acknowledge that the machine-learning-based intensity control approach is poised to become more widely accepted, provided the challenges associated with sensor-based control are promptly addressed. Furthermore, an observation indicates that, apart from the machine-learning-based approach, which does not rely on sensors in its intensity control strategy, both fuzzy logic and pulse width modulation methods heavily depend on the sensor-based approach. These two control methods function in direct correlation with the sensor-based intensity control approach, utilizing one or more sensors. This establishes the sensor-based approach as a fundamental influence on nearly all control methods, with the exception of the machine-learning-based approach, which relies more on cameras for environmental data collection. In summary, the data depicted in Figure 4 suggests that the sensor-based and machine-learning-based headlight beam intensity control approaches are the most acknowledged and widely employed methods among developers of intelligent headlights.
Headlight intensity distribution patterns of the high and low beams
To develop an automatic control system for headlight beam intensities, a comprehensive understanding of the pattern formation of these beams and their impact on road users during nighttime driving is crucial. Ensuring that vehicle headlights provide effective road illumination without causing glare for other road users necessitates adherence to specific requirements in the design of headlight reflective devices and associated equipment. The significance of both low and high beams in vehicle headlights cannot be overstated, as their functions differ significantly. They collectively contribute to enhancing road safety, providing comfort, and ensuring optimal road illumination for drivers and other road users in adverse nighttime and weather conditions. High beams are utilized for long-distance visibility in the absence of oncoming vehicles, while low beams, featuring an asymmetrical pattern, offer maximum forward and lateral illumination. Importantly, they minimize glare directed toward oncoming vehicles and road users. 90 To enhance the reliability of headlight modeling, researchers90,91 integrated a market-weighted headlight database with the headlight beam pattern model and a mathematical model. The lights in the market-weighted database were randomly selected from the top 90% of USA vehicle sales in 2010, with a minimum of 25 samples chosen. Compliance with the requirements set by the Economic Commission of Europe (ECE) and the Federal Motor Vehicles Safety Standards (FMVSS) in the United States is mandated for vehicles. For increased clarity, the Iso-candela and Iso-illuminance diagrams illustrating the road surface from a pair of high-beam headlights and a pair of low-beam headlights are presented in Figures 5 and 6, respectively. These diagrams are based on luminous intensities at the 50th percentile, with specified light mounting height (0.62 m for high beams, 0.66 m for low beams) and light separation (1.12 m for high beams, 1.20 m for low beams). Noteworthy contributors to this visual representation include authors such as.91–96

Iso-candela and iso-illuminance diagrams of the road surface from a pair of high-beams: (a) isocandela diagram (cd) and (b) iso-illuminance diagram (vertical lx).

Iso-candela and iso-illuminance diagrams of the road surface from a pair of low-beams: (a) isocandela diagram (cd) and (b) iso-illuminance diagram (vertical lx).
Similarly, the headlight radiation pattern curves of the high and low beams of the headlight luminous intensities at the 75th percentiles were presented by authors in91,93–96 using ISO-candela, and ISO-illuminance as shown in Figures 7 and 8 respectively.

ISO-candela and ISO-illuminance diagrams of the road surface from a pair of high beams: (a) isocandela diagram (cd) and (b) iso-illuminance diagram (vertical lx).

ISO-candela and ISO-illuminance diagrams of the road surface from a pair of low-beams: (a) isocandela diagram (cd) and (b) iso-illuminance diagram (vertical lx).
The headlight illumination, E on the road surface as shown in Figure 9 is given as:

Where

Headlight illuminance calculation.
Authors in Memedi et al., 98 presented the model-fitting process for integrating the empirical data in a simulated framework. They used the non-linear least squares method and the surface fitting tool from the curve-fitting toolbox of MATLAB for deriving the following equations. Characterizing the path loss between two vehicles is first based on the distance which is given as:

They derived values for the following parameters

The following parameters were also obtained from the empirical data,

Equations (2),(3), and (4) were used to plot the radiation pattern of the headlight as shown in Figure 10.

Comparison of the derived model, the empirical data, and the combination of both.
Comparison
To enhance comprehension and foster a deeper appreciation of the headlight model, radiation distribution pattern curves at the 50th and 75th percentiles were presented in Figures 5 to 8, respectively. These figures offer a comparative analysis of the two types of headlight beam intensity pattern curves using ISO-candela and ISO-illuminance models. The ISO-candela luminous intensity pattern curves model illustrates the vertical angle illumination against the horizontal angle illumination, providing a clear distinction between the headlight high and low beams. Upon comparing the ISO-candela pattern curves of the high beam and low beam, a notable observation is that the low beam produces asymmetric intensity pattern curves concentrated toward the left. This design anticipates providing short-distance illumination to minimize glare for other road users. The low beam, by its design, does not project over long distances before reaching the road surface. In contrast, the high beam generates symmetrical intensity pattern curves with the potential to travel longer distances compared to the low beam. The inherent design of the high beam is oriented toward extended visibility. This comparative analysis of the pattern curves contributes to a comprehensive understanding of how the two types of beams function differently in terms of their illumination characteristics.
Additionally, in the comparison of ISO-illuminance between the low beam and high beam, it was observed that optical power was distributed on both sides of the light source along the vertical axis, while along the horizontal axis, the optical power was presented lengthwise. Specifically, in the case of the low beam, the electrical Receive Signal Strength (RSS) closer to the light source was measured at 100 dBm, whereas for the high beam, it was recorded as 50 dBm. This indicates that the RSS of the low beam near the light source is 100% stronger than that of the high beam, as depicted in Figures 5 to 8 for both the radiation pattern curves’ intensity distribution models at the 50th and 75th percentiles. This finding suggests that the low beam offers superior front illumination compared to the high beam during nighttime driving. Furthermore, the headlight high beam demonstrates the capability to provide optical power over a longer lengthwise distance, up to 200 m, as opposed to the low beam, which can only provide 100 m of lengthwise optical power distance. Consequently, it is reasonable to conclude that the high and low beams of the headlight complement each other by compensating for their respective deficiencies. While the high beam can travel twice the lengthwise optical power distance of the low beam, the low beam excels in illuminating the vehicle front twice as effectively as the high beam. It is noteworthy that the magnitude of the RSS decreases with an increasing optical power length.
The optical power is inversely related to the focal length, representing the degree to which optical systems converge or diverge light. Higher optical power corresponds to a shorter focal length. In the ISO-illuminance model of the high beam, contour lines were delineated as the RSS decreased from 50 dBm to 30 dBm, and this pattern repeated as it further decreased to 20, 10, 5, 3, 2 dBm. The final contour line was drawn at 1 dBm, corresponding to a lengthwise optical power distance of 200 m, as illustrated in Figures 4(b) and 6(b). Similarly, in the case of the low beam, contour lines were drawn as the RSS decreased from 100 dBm to 50 dBm. Additional contour lines were added at 30 dBm, 20, 10, 5, 2, and the final 1 dBm contour line was drawn at the lengthwise optical power distance of 100 m, as depicted in Figures 6(b) and 8(b). Notably, the low beam exhibits a higher frequency of RSS contour lines compared to the high beam. This analysis provides insight into the varying optical power characteristics of both high and low beams, shedding light on their focal lengths and the resulting patterns of light convergence or divergence in the ISO-illuminance model.
As shown in Figure 10, Memedi et al. 98 introduced a novel headlight model, deviating from the conventional use of contour lines to represent RSS values. Instead, the author employed colors to illustrate different RSS values. The left plot in Figure 10 depicts RSS values calculated using the derived analytical model. For the sake of comparison, the author included the RSS values obtained from empirical data in the middle plot. The conclusion drawn was that equation (4) closely aligns with the empirical data, especially in capturing the asymmetrical angular behavior characterized by a weaker concentration of power on the left side of the headlight. This finding is consistent with the observations shared by other authors, such as91–96 whose models also yielded similar results.
Discussions
This paper conducts a comprehensive review of automotive intelligent headlight design, focusing on various methods employed by different developers to automatically control headlight beam intensities, thereby preventing dazzling of other road users. The study identifies and assesses four intelligent headlight beam intensity control approaches: sensor-based, machine learning-based, pulse width modulation-based, and fuzzy logic-based. Table 1 succinctly outlines the strengths and limitations of these approaches. Figure 4 serves as a comparative tool for these approaches based on their utilization rates. Notably, the sensor-based approach emerges as the most utilized. Furthermore, the study reveals a direct association between the fuzzy logic and pulse width modulation approaches with the sensor-based method, as they rely on various forms of sensors for their functionality. The machine learning-based approach, leveraging weak AI technology, has gained prominence in the automotive intelligent headlight system. Using cameras to capture road information, it employs a multi-classifier for detecting the high beam of oncoming vehicles. However, its reliance on image quality raises concerns, especially during adverse weather conditions, compromising its effectiveness. To deepen our understanding of the intensity distribution patterns of headlight high and low beams, the paper reviews headlight beam intensity distribution pattern models, comparing curves using ISO-candela and ISO-illuminance models. The high beam exhibits symmetrical pattern curves with wide and long-distance intensity distribution patterns up to 200 m. This underscores the necessity for an intelligent headlight beam intensity control system to manage the high beam automatically, given the occasional limitations in driver control. Conversely, the low beam features asymmetrical radiation pattern curves designed to prevent glare on the highway during nighttime driving. Providing high RSS at a short lengthwise optical power distance of 100 m, the low beam addresses visibility challenges and contributes to reducing nighttime accidents caused by poor driver visibility, particularly due to glare from opposing vehicles’ high beams. The paper emphasizes the potential for technological advancements to mitigate these avoidable situations.
Conclusion
This paper provides a comprehensive review of intelligent headlight beam intensity control approaches and headlight radiation pattern distribution models, aiming to clarify the confusion surrounding these topics. It clearly outlines the four practical intelligent headlight beam intensity control approaches – sensor-based, machine learning-based, pulse width modulation-based, and fuzzy logic-based. The strengths and limitations of each approach are succinctly summarized in Table 1. A comparative analysis of the four approaches based on their utilization rates reveals the sensor-based approach as the most preferred due to its simplicity in architecture construction and cost-effectiveness. The machine learning-based approach emerges as the most promising technology for intelligent headlight beam intensity control and is the second most preferred among developers. It is important to note that these conclusions are drawn from a random sample of 44 authors in the field spanning from 2018 to 2022. An intriguing aspect explored in this paper is the headlight radiation pattern distribution model. The review enhances our understanding of the characteristics of the high and low beams. The deliberate asymmetrical intensity distribution pattern of the low beam aims to improve front vehicle illumination and reduce glare for drivers of opposing vehicles. The low beam achieves a high Receive Signal Strength (RSS) at a shorter lengthwise optical power distance. The high beam, on the other hand, produces low RSS near the light source but travels twice the distance of the low beam, making it suitable for longer distance illumination. However, its symmetrical intensity distribution pattern raises concerns about potential glare for other road users if not managed properly. Notably, research interest in intelligent headlight design has substantially increased in the past half-decade, resulting in diverse intensity control approaches. Anticipating continued growth in this area, the authors suggest that the future direction for researchers should focus on a robotic eye headlight technology. This envisioned strong AI technology would mimic the human eye, allowing the headlight to dynamically adjust between high and low beams based on road conditions captured by the robotic eye.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: We are immensely thankful to the funding Agencies of this study: National Key Research and Development Program of China (2022YFB2503302), National Natural Science Foundation of China (52225212, U20A20333, U20A20331, 52072160, 52272418, U22A20100), Key Project for the Development of Strategic Emerging Industries of Jiangsu Province (BE2020083-3, BE2020083-2)