
Abstract
Accurate and efficient road adhesion coefficient estimation is the premise for the proper functioning of vehicle active safety control system. With the increased application of distributed drive vehicles and on-board sensors, a multi-module self-organizing feedforward neural network (LM-MMSOFNN) based on improved Levenberg-Marquardt (LM) learning algorithm is proposed for online road adhesion coefficient estimation. In this method, the vehicle dynamics model and the Dugoff tire model were well established, and the input and output variables of the neural network model were obtained by Principal Component Analysis (PCA) method. To improve the estimation accuracy, Extended Kalman Filter (EKF) and Moving Average (MA) were used to denoise the measured signal. On this basis, a road adhesion coefficient estimation model based on multi-module self-organizing neural network was established. Both sides of road adhesion coefficients are calculated by multi-module self-organizing neural network simultaneously. Through the increase and decrease of self-organizing neurons and the improved LM learning algorithm, the computational complexity and system hardware storage are reduced, and the algorithm exhibits a good adaptability to different roads. Simulation and vehicle experiments show that the proposed method can fully extract multi-sensor information and adapt to the different road characteristics changes under driving condition. As compared with Kmeans method, it has higher estimation accuracy and stronger adaptability to varying speed.
Keywords
Introduction
With the development of internet and artificial intelligence, a large number of driving assistance systems have been applied to autonomous vehicle. However, the vehicular handling stability depends on the real-time state parameters.1,2 Road adhesion coefficient is one of the key parameters affecting vehicle active safety control. 3 Thus, there is a great potential of road adhesion coefficient estimation in academia and industry.
The main factors affecting road adhesion coefficient are tire, road surface and driving conditions. There are two main forms to identify road adhesion coefficient, one is measured by optical sensors, 4 but due to high cost and strict application environment, it has not been widely used in vehicle development. The other way is to install a large number of sensors inside the tire or on the bodywork to estimate the road adhesion coefficient by vehicle response under different conditions. 5 Commonly used methods include design observer6,7 and Kalman filter.8,9 A 6-DOF tire-road friction coefficient estimation method based on the longitudinal, lateral and vertical accelerations of each tire was proposed, then the recursive least square method is applied to estimate the tire-road friction coefficient. 10 Cheng et al. 11 designed a monitoring system which can simultaneously observe tire-road friction coefficient and tire force by mode switching observer under different working conditions, such as normal running, braking and steering. In addition, the vehicle kinematics and dynamics model are combined to estimate the road adhesion coefficient.12,13 Based on this method, a nonlinear observer was designed to estimate the road adhesion coefficient by states of wheel torque, lateral acceleration and vehicle lateral displacement. 14
The rapid development of autonomous driving has benefited from a large number of sensors. Fusion of multiple sensors to obtain more vehicle information becomes the focus of relevant research.15,16 According to the types of available sensors, Fayyad et al. 17 proposed a fusion algorithm based on engine torque, braking torque, accelerometer and GPS measurement data which can estimate the adhesion coefficient of each wheel. The vision sensor, laser sensor and global positioning system are combined with Kalman filtering algorithm to provide environmental information for intelligent vehicles.18,19 Inevitably, there are measurement delay and environmental impacts in visual system, such as rainy and foggy days.20,21
Using a data-driven method to identify the road adhesion coefficient can avoid the influence of environmental factors, thus multi-sensor based neural network is applied in the estimation of road adhesion coefficient.22,23 By combining wheel angular velocity and yaw velocity sensors, tire lateral force and longitudinal force was estimated first, then multi-layer perceptron neural network was used to estimate road friction coefficient. 9 When the friction characteristics are approximately unknown, an accurate estimation method of tire-road friction can be designed by using multi-sensor information fusion. 24 Bonfitto et al. 25 proposed three recursive artificial neural networks to estimate vehicular sideslip angles under different road conditions, meanwhile, identify dry, wet and icy road types. Instead of using the standard mathematical tire model, the road friction coefficient under lateral force excitation is estimated by using the time-delay neural network (TDNN). Ribeiro et al. 26 used TDNN to estimate the road friction coefficient under detecting lateral force excitation. In addition, this method can independently estimate the road friction at each wheel. Pu et al. 27 uses the Long Short Memory (LSTM) neural network to develop a data driven road friction prediction model, and uses the time characteristics of road friction to improve the prediction performance. By using video data to estimate friction coefficient, the road surface and condition classification based on deep neural network (DNN) is used to improve the vehicle dynamics control of anti-lock braking system (ABS). 21
The estimation deviation makes a great impact on vehicle stability control under complexity road conditions, especially butt road or split road. To solve this problem, this paper proposes an online road adhesion coefficient estimation method based on multi-module self-organizing neural network (LM-MMSOFNN), which can observe the road adhesion coefficient of both sides at the same time, so as to improve the accuracy and stability of vehicle control. The main contributions of this paper are as follows:
Combined with vehicle dynamics model and multi-sensors, an independent estimation method for road adhesion coefficient of left and right wheels was proposed based on LM-MMSOFNN.
The neural network model of road adhesion coefficient is established directly without estimating tire force, which simplifies the model and calculation process.
Self-organizing neural network can adaptively adjust the optimal network structure and improve the adaptability of different working conditions. The computational complexity and storage space of the network are reduced by using the improved LM algorithm, EKF, MA and the increase or decrease of self-organizing neurons.
The rest of this paper is organized as follows. Section 2 presents the vehicle dynamics modeling. Section 3 details the estimation of road adhesion coefficient based on LM-MMSOFNN algorithm. Section 4 describes simulation and real car experiment. Finally, the conclusions are concluded in Section 5.
Vehicle and tire models
Vehicle dynamics model and tire model
At present, the parameter estimation of road adhesion coefficient by using neural network mostly uses longitudinal and lateral tire forces first, and then estimates the road adhesion coefficient. In this paper, the dimensionality of vehicle dynamics model is reduced through principal component analysis of relevant parameters, and the neural network model of road adhesion coefficient is obtained directly. Thus, the original model of calculating road adhesion coefficient by estimating tire force is simplified. Four wheels were not simplified by the concentrated axis of mathematical tire model, but the road adhesion coefficient models of left front wheel and right front wheel were established respectively. Therefore, the calculated road adhesion coefficient is more accurate and more adaptable to complex road working conditions.
The four-wheel independent drive (4WID) vehicle dynamics model and Dugoff tire model are illustrated in Figure 1. Differential equations of the vehicle body motion are then established to estimate the road adhesion coefficient and tire force.

The 4WID vehicle dynamics model and tire model: (a) vehicle dynamics model and (b) tire model.
The differential equations of vehicle model are:
(1) Longitudinal movement

(2) Lateral movement

(3) Yaw motion

where,
Under the driving conditions, the longitudinal slip rate of the wheel is:

The longitudinal and lateral forces of the tire are calculated using the nonlinear Dugoff model:


where,
The function


The vertical loads of each tire are:

where,
LM-MMSOFNN algorithm
Multi-Module Self-O Feedforward Neural Networks (MMSOFNN)
Feedforward neural network28,29 is a one-way multi-layer neural network. The input information starts from input layer, and goes to hidden layer, which is also the adaptive rule layer, and then ends at output layer. By adaptively changing network structural parameters, the self-organizing neural network can find the inherent laws in samples automatically, which can not only preserve the topological mapping between samples, but also reduce the dimension of input feature space and improve the computational efficiency.30,31 Because of its excellent performance in prediction, the self-organizing neural network has a strong advantage in estimation of road adhesion coefficient compared with other neural networks. The multi-module neural network32–34 is composed of several independent sub-network modules, which is suitable for the identification of road adhesion coefficient for multiple wheels. The neural network prediction model of road adhesion coefficient was established for each sub-module, and neural network training can be carried out separately to find the optimal network hidden layer structure and establish the best neural network prediction model.
Improved LM learning algorithm
A self-organizing neural network35,36 include center

where,

The gradient sub-vector


Avoiding multiplication of Jacobian matrix in the algorithm, the improved LM algorithm37,38 only generates row vectors, thus reducing storage space and improving calculation speed. For all training samples in the current sliding window, the gradient vector


The parameter update of the improved LM algorithm is based on

where,
SOFNN growth
The SOFNN is determined by the training samples, while the number of hidden layer neurons has a great impact on the network structure. Too many neurons might increase the complexity of the network, whereas fewer neurons might reduce the nonlinear fitting ability of the network.39,40 Therefore, an appropriate network structure could not only ensure the accuracy of tire force estimation, but also reduce the computational complexity.
The neuron growth index with NGI for SOFNN is:

and

where
SOFNN pruning
The neural pruning index NPI is defined based on the output variance and output mean of the nodes in the rule layer:
Combining NPI we could also determine the neuron pruning threshold,

where,
In the process of neuronal modification, if the jth hidden neuron NPI
j
<
Road adhesion coefficient estimation
This section makes online estimation of road adhesion coefficient based on LM-MMSOFNN algorithm, which mainly includes three parts:
Firstly, Principal Component Analysis (PCA) method was used to reduce the dimensionality of the vehicle dynamics model and selected the relevant characteristic parameters. Then, feature extraction of information measured by on-board sensors, denoising of measurement signals through Extended Kalman filter (EKF) and Moving Average (MA), and extracting main feature information.
LM-MMSOFNN is constructed to establish a neural network prediction model which can simultaneously estimate different road adhesion coefficients of both sides wheels. Figure 2 is the structure diagram of neural network prediction model on-line estimation proposed in this paper.

Structure diagram of road adhesion coefficient online estimation based on neural network prediction model.
Simulation and real vehicle tests
Simulation results
In order to verify the effectiveness of the proposed road adhesion coefficient online estimation based on LM-MMSOFNN, CarSim was performed to generate the data set of vehicle dynamics simulation. CarSim is a software specially designed for vehicle dynamics simulation. It has been adopted by many international automobile manufacturers and has become the standard simulation software in the automobile industry. With the real parameters of experimental vehicle were imported into the CarSim software for calculation, then the data were derived to verify the proposed neural network method. The relevant parameters of the real vehicle are presented in Table 1.
Main parameters of 4WID vehicle.

In the vehicle dynamics model and tire model, many state parameters related to the road adhesion coefficient, and there is a strong nonlinear relationship between the parameters. According to vehicle dynamics and tire models, the parameters related to the road adhesion coefficient are

The neural network has a strong superiority in dealing with nonlinear problems, it is very appropriate to establish a road adhesion coefficient estimation model. Therefore, the multivariate statistical method of PCA is used to reduce the dimension of vehicle dynamics model and extract the main characteristic parameters. The results of PCA analysis are shown in Figure 3.

The spearman principal component analysis related to μ.
Combined with the vehicle dynamics model, the Spearman correlation between input and output was analyzed, and finally the input and output signals of the neural network were determined. The input-output relationship of the online prediction model of road adhesion coefficient based on neural network is:

Performance evaluation indicators of the model, select RMSE, MAE, and NRMS (normalized root mean square error) 41 :



In the simulation and real vehicle experiment, the same input and output signals are used to establish the neural network model. The input signals are measured by on-board sensor inertial measurement unit (IMU), the wheel speed sensor (WSS) and wheel angle sensor (WAS) which were pre-installed into the hub motor. The list of signals in the LM-MMSOFNN algorithm are given in Table 2.
The list of signals in LM-MMSOFNN algorithm.

Estimation error of adhesion coefficient of butt road at 90 km/h.

Estimation error of adhesion coefficient of butt road at 60 km/h.

Estimation error of left side adhesion coefficient of split road at 60 km/h.

Butt road
Working condition 1
Relevant parameters of the experimental vehicle and experimental conditions were set in the CarSim, including speed, road adhesion coefficient, driving track, driving start-stop time, etc. The vehicle drives under double-lane change road condition at the speed of 90 km/h and then the condition changes into serpentine road after 20 s. Secondary feature extraction was carried out to remove unavailable data, then 3200 sets of data were finally obtained for neural network modeling which contains the values of all input and output signals. The secondary feature extraction of data processing can reduce the learning time of neural network and avoid the overfitting problem. All data sets were divided into two parts, 70% for training and 30% for testing.
The vehicle drives 20 s on the dry asphalt road (road adhesion coefficient 0.85) and drives into ice and snow road (road adhesion coefficient 0.35) for 30 s. The estimated results of road adhesion coefficient and errors are shown in Figure 4(a) and (b). The vehicle drives on the ice and snow road for 30 s, then drives on dry asphalt road for 20 s. The estimated results are illustrated in Figure 4(c) and (d).
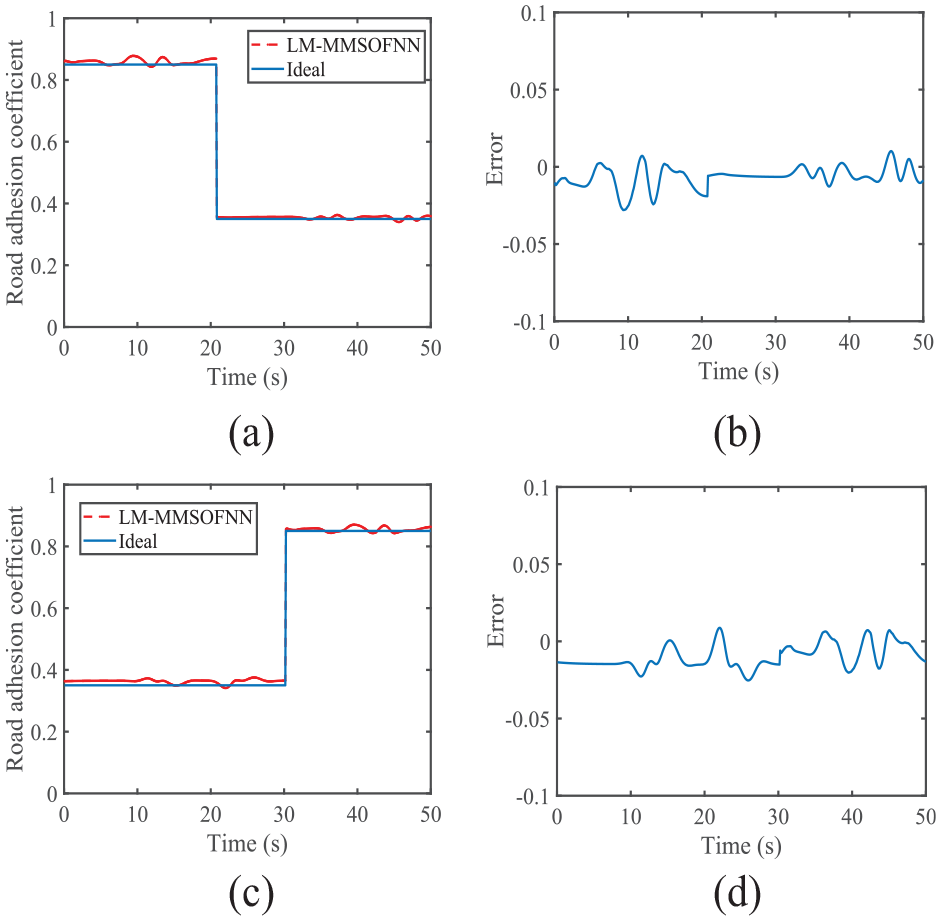
Adhesion coefficient estimation of butt road at 90 km/h: (a) the vehicle from dry asphalt road into ice road, (b) estimation error, (c) the vehicle from dry ice road into asphalt road, and (d) estimation error.
It can be seen that the estimation of road adhesion coefficient based on LM-MMSOFNN algorithm has high accuracy for the butt road at a speed of 90 km/h. With the minimum RMSE value is 0.0168 and the minimum MAE value 0.0096, which can meet the needs of vehicle control.
Working condition 2
At the speed of 60 km/h, the vehicle drives from the gravel road (road adhesion coefficient 0.6) to the ice road (road adhesion coefficient 0.2) after 30 s. The results and errors of road adhesion coefficient estimation are given in Figure 5(a).

Adhesion coefficient estimation of butt road at 60 km/h: (a) the vehicle from ice road to gravel road and (b) the vehicle from gravel road to ice road.
The vehicle drives 30 s from ice road to gravel road with the results and errors of road adhesion coefficient estimation are shown in Figure 5(b).
At the speed of 60 km/h, the estimation of road adhesion coefficient based on LM-MMSOFNN algorithm the minimum RMSE value is 0.0297 and the minimum MAE value is 0.0164 which can completely meet the needs of vehicle control. The estimated results of two conditions of the butt road are presented that the neural network can be better trained when the adhesion coefficients differ greatly, and the estimated results are closer to the actual value.
Split road
Working condition 1
Adopt a split road with a speed of 60 km/h, the left side adhesion coefficient is 0.8 (dry asphalt road) and the right side adhesion coefficient is 0.2 (ice road). Driving in serpentine conditions for 20 s, 4000 data sets were generated, which were divided into two parts, 70% of were used for training and 30% for testing. The results of the adhesion coefficients of the left and right sides of the road are introduced in Figures 6 and 7.

Left side adhesion coefficient estimation of split road at 60 km/h: (a) estimation of left side road adhesion coefficient and (b) estimation error.
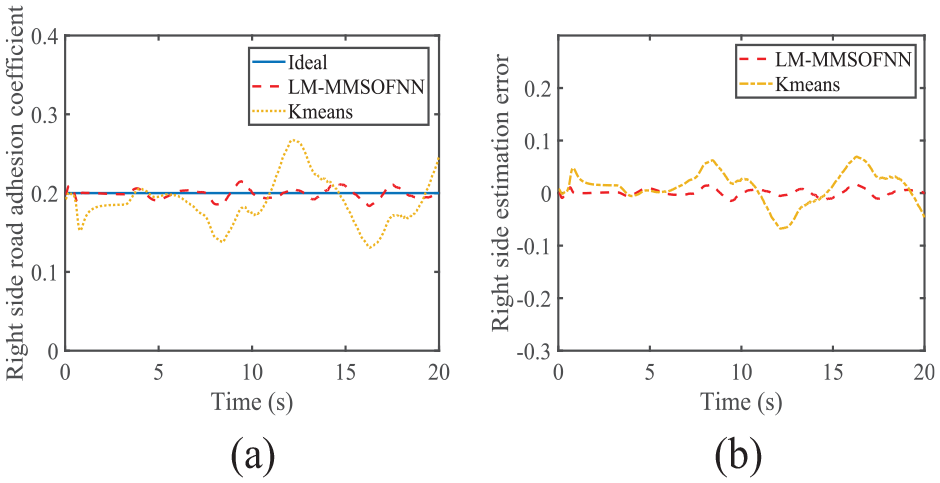
Right side adhesion coefficient estimation of split road at 60 km/h: (a) estimation of right side road adhesion coefficient and (b) estimation error.
On the open road with a speed of 60 km/h, LM-MMSOFNN can be used to estimate the road adhesion coefficient with high estimation accuracy and the maximum estimation error is 0.08, which can meet the requirements. In Figures 6 and 7, the estimated accuracy of the left side is higher than the right side, which is caused by the steering wheel angle selected was the left front wheel when establishing the prediction model of neural network road adhesion coefficient estimation.
Working condition 2
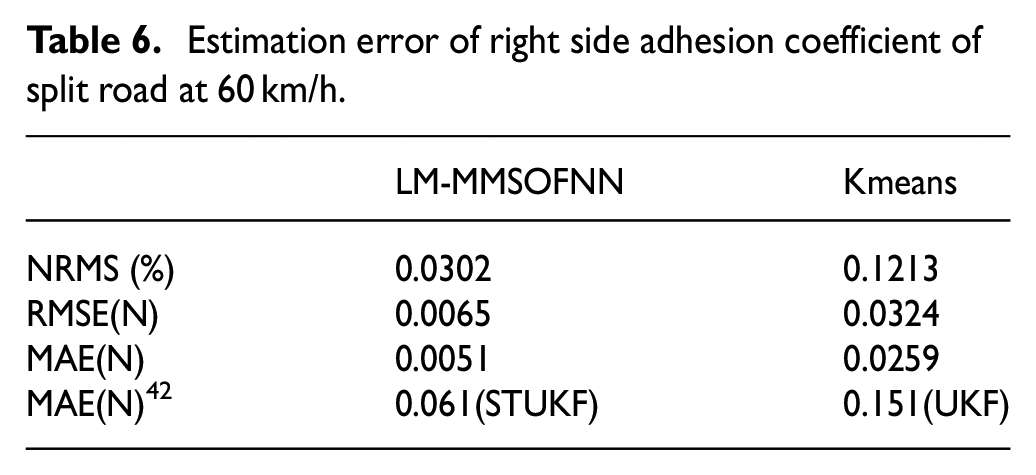
Figure 8(a) demonstrates the sensor measurement signals of simulation on variable speed condition. In Figure 8(a) the velocity varies with time working condition that the maximum longitudinal speed is 95 km/h and the minimum longitudinal speed is 0.7 km/h. Under the condition of split road, the adhesion coefficient of the left side is 0.8, the adhesion coefficient of right side is 0.2, driving for 20 s. Figures 9 and 10 illustrate the estimated results of the road adhesion coefficient of the left and right sides on the split road. In Tables 6 and 7, the estimated errors of neural network modeling are reported.
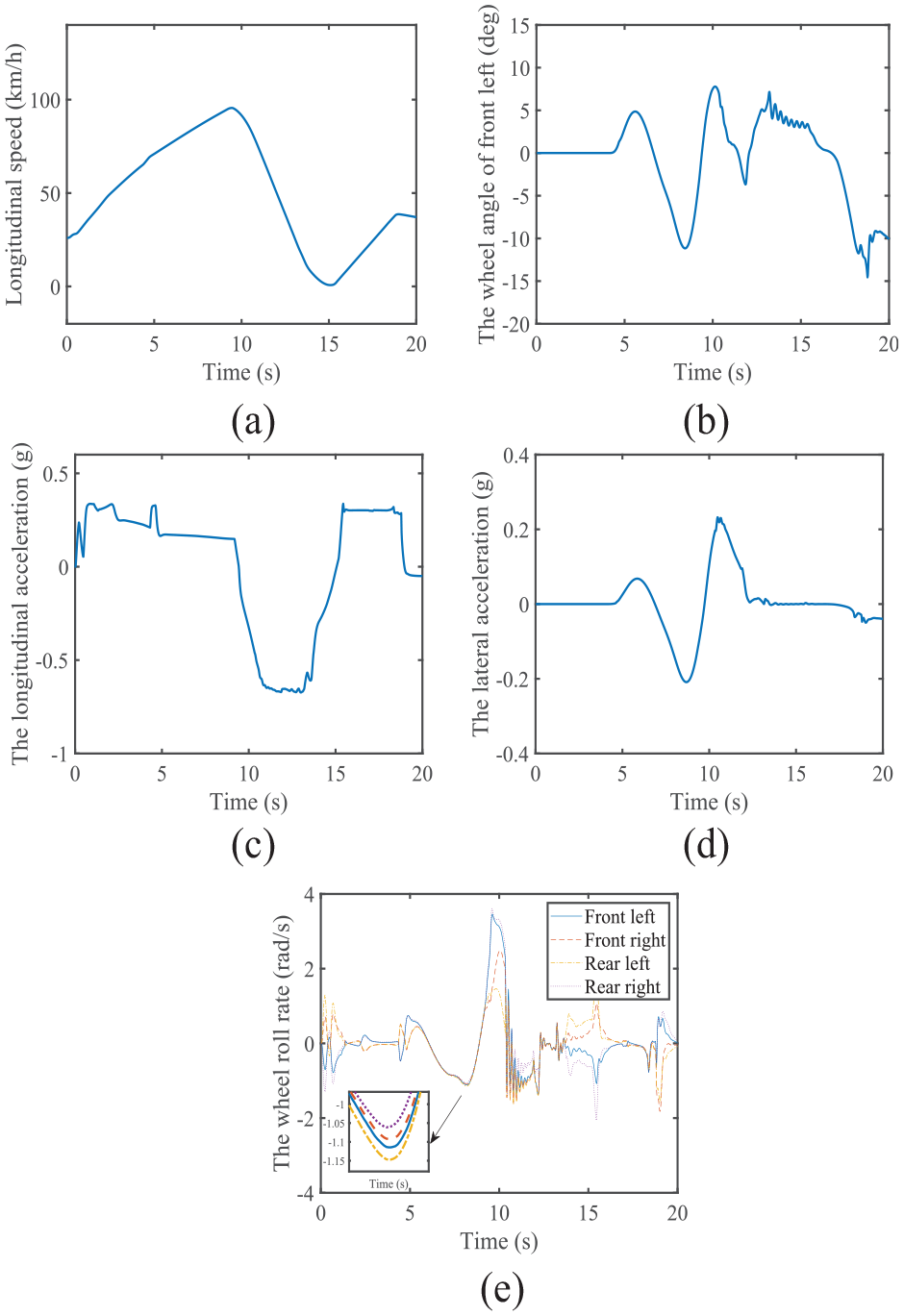
Variable speed simulation experiment sensor measurement signals: (a) time variation of longitudinal speed, (b) the wheel angle of left front wheel, (c) the longitudinal acceleration, (d) the lateral acceleration, and (e) the wheel roll rate.

Left side adhesion coefficient estimation with time variation speed: (a) estimation of left side road adhesion coefficient and (b) estimation error.

Right side adhesion coefficient estimation with time variation speed: (a) estimation of right side road adhesion coefficient and (b) estimation error.
Estimation error of right side adhesion coefficient of split road at 60 km/h.
Estimation error of left side adhesion coefficient with time variation speed.

Estimation error of right side adhesion coefficient with time variation speed.

Estimation error of dry asphalt road adhesion coefficient.

Estimation error of ice road adhesion coefficient.

As shown in Figure 8 when the longitudinal velocity of the vehicle changes greatly, the LM-MMSOFNN method can still meet the high accuracy requirements in estimating the road adhesion coefficient of both sides. In Figure 9, the MAE on the left is 0.0061, and the MAE on the right is 0.0057 in Figure 10. Compared with the Kmeans method, the LM-MMSOFNN estimation of road adhesion coefficient error is obviously smaller, with higher estimation accuracy and stronger adaptability to variable speed conditions.
In the simulation of road adhesion coefficient estimation, the variable speed condition is closer to the actual driving demand. The accurate prediction model of road adhesion coefficient of left and right wheels can effectively avoid vehicle slip and enhance the stability control effect during turning and braking.
Real vehicle test
Some experiments with a four-wheel independent distributed drive pure wire controlled intelligent vehicle are conducted to test the practicability of estimation scheme LM-MMSOFNN. The type of IMU of the vehicle is MTI-G-710, and the sampling period of the global positioning system (GPS) is 2.5 ms. Rapid control prototype (RCP) is a real-time target control system developed by Speedgoat which recommended by MathWorks and can realize real-time online development in the Simulink environment. The wheel rotation speeds and wheel angles are measured by WSS and WAS sensors which built into the hub motor and transmitted signals to computer by CAN bus. Sensors and road conditions for real vehicle test, as shown in Figure 11.

Vehicle sensors and road conditions of realvehicle test.
The real vehicle car test is carried out under dry asphalt road conditions. Due to the large measurement noise in IMU, the measured longitudinal acceleration and lateral acceleration are processed by the EKF-MA to reduce the impact of road adhesion coefficient estimation.
As can be seen from Figure 12, during the actual vehicle test on dry asphalt road, the estimated results of road adhesion coefficient on both sides can meet the actual demand. The mean absolute error on the left side is 0.0097, and the mean absolute error on the right side is 0.0134. Compared with Kmeans method, inferred that Kmeans method has a higher error when the vehicle turns, while LM-MMSOFNN method has no obvious change. Therefore, the method proposed in this paper has strong adaptability to dry asphalt road in actual road experiment.

Road adhesion coefficient estimation on dry asphalt road: (a) road adhesion coefficient estimation of left side and (b) road adhesion coefficient estimation of right side.
Figure 13 provides the actual vehicle experiment test on the ice road. On the left side road adhesion coefficient estimation, the Kmeans neural network training model does not converge and has a large error all the time. With the estimating on the right side, it is more sensitive to the changes of the speed and driving trajectory, resulting in the maximum error of 0.25, which cannot meet the accuracy requirements of the road adhesion coefficient estimation. It is worth noting that the estimation results of road adhesion coefficients on both sides of LM-MMSOFNN method have high accuracy with the mean absolute error is 0.0095 on the left side and 0.0138 on the right side.

Road adhesion coefficient estimation of ice road: (a) road adhesion coefficient estimation of left side and (b) road adhesion coefficient estimation of right side.
Conclusion
In this paper, a LM-MMSOFNN estimation method for road adhesion coefficient is proposed without adding vehicle sensors. The multi-module self-organizing neural network is designed to calculate the road adhesion coefficients of both sides at the same time, which provides important information for the stability control of distributed drive vehicles. Firstly, using the method of data dimensionality reduction in machine learning, PCA analysis of modeling parameters was carried out and main characteristic parameters were extracted. Then, noise reduction filtering and data preprocessing are carried out by using EKF-MA method. Finally, the neural network model was constructed with the improved LM learning algorithm, with the growth and pruning of self-organizing neurons improves the generalization ability of the network, reduces the computational complexity and storage space, improves the estimation accuracy. Through simulations and real vehicle experiments on the butt and splitting roads, the LM-MMSOFNN method in this paper outperforms the Kmeans method under the evaluation metrics of NRMS, RMSE and MAE criteria. In conclusion, the proposed method has higher estimation accuracy and better adaptability to variable speed conditions.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by the National Science Foundation of China under Grant (U22A20246), Key Research Project of Hebei Province (21342202D).