
Abstract
In the present study, the optimization design of the cubic nonlinear damping is conducted for a floating raft isolation system, which can be simplified as a multiple degree-of-freedom system with double parallel freedom inputs. The direct relationship between the power transmissibility and cubic nonlinear damping parameters is derived by taking advantage of the output frequency response function (OFRF) approach. The design requirements are proposed in order to achieve low resonant peak values, low power transmissibility over the high frequency range. The detailed step-by-step design process of the floating raft isolation system applied in a practical vessel is provided. A polynomial function, in terms of the required frequency range, is developed and validated from the simulation data. The case application indicates that the design method determined by the OFRF approach can effectively realize the design requirements of a floating raft isolation system, which can deal with the relationship of the power transmissibility and nonlinear damping parameters.
Keywords
Introduction
The floating raft system, a type of special two-stage vibration isolation platform with parallel vibration sources, is widely used in a wide class of large vessels and submarines. The floating raft system can effectively suppress the ships’ vibration and noise that is transmitted from the hosts and auxiliary machines. Further, the two-stage vibration isolation system exhibits better isolation performances than one-stage isolation systems, in particular over the high frequency range. 1 The optimization design of the nonlinear damping of a vibration isolation system is a necessary and crucial technique in order to achieve a desired vibration reduction, especially in submarines, and considerable attention has been paid regarding with the floating raft isolation system design and analysis.2,3
In order to suppress the output spectrum of the resonant region, the linear damping model is widely applied to design the vibration isolation system. However, by increasing the linear damping, the output amplitude of the non-resonant region will be increased, and the resonant frequency will be shifted. 4 The nonlinear strategies were introduced and studied in the vibration isolation system so as to achieve a better isolation preference. A simpler yet effective approach involving the quasi-zero stiffness isolator, which can achieve a lower resonant frequency without changing the static stiffness by introducing auxiliary springs. 5 Ravindra and Mallik 6 investigated the effects of the nonlinear viscous damping on a hardening Duffing-type system, and the results indicated that chaotic responses from the nonlinear spring can be eliminated.
The nonlinear vibration isolation system is difficult to design due to the traditional nonlinear methods, for example, the harmonic balance method that cannot exhibit direct relationships between the output amplitude and nonlinear parameters. Most recently, Lang et al. 7 proposed the output frequency response function (OFRF) concept of nonlinear Volterra systems, which described the explicit relationship between the output spectrum and nonlinear characteristic parameters for a single degree-of-freedom system. An effective determination approach was also derived and verified based on the Volterra series in the frequency domain. 8 Further, the effects of nonlinear viscous damping on the single degree-of-freedom (SDOF) and multiple degree-of-freedom (MDOF) vibration isolation systems were theoretically analyzed by making use of output frequency response function (OFRF) approach.9,10 Peng et al. 11 developed an algorithm to estimate the nonlinear stiffness and damping parameters based on the nonlinear output frequency response functions of MDOF nonlinear systems. An OFRF expression of a SDOF system can be described by a polynomial differential equation, and the advantage of nonlinear viscous damping applied to the SDOF system had been demonstrated and validated in the numerical analysis. 12 Ho et al. 13 presented the design of a SDOF nonlinear vibration isolation system, which is concerned with both spring and damping nonlinearities. They established the relationship between the system output frequency response and parameters that define the system nonlinearity by employing the output frequency response function (OFRF) approach. Wang et al. 14 presented the effects of the cubic nonlinear damping on the vessels’ floating-raft isolation system, and the single diesel engine rotating condition and the double diesel engine rotating condition were considered. Zhu and Lang15,16 derived an efficient algorithm based on the OFRF concept in order to facilitate the nonlinear systems design in the frequency domain, and provided a general design procedure for a nonlinear auto regressive with exogenous (NARX) inputted model. They also proposed a new concept known as the associated output frequency response function (AOFRF), which facilitated the analysis of the effects of both linear and nonlinear system parameters on the output response. 17 Zhu et al. 18 proposed and developed a new concept known as the Generalized Associated Linear Equations (GALEs), which can significantly facilitate the nonlinear system analyses and deal with associated practical applications. Recently, Zhu and Lang 19 demonstrated the beneficial effects of the cubic nonlinear damping that is extended to the systems subject to general inputs.
Although a lot of effort is being made to develop the nonlinear damping and spring design technique for a single degree-of-freedom isolation system, the effective optimization design approach of the nonlinear damping has yet to be extend to the floating raft isolation system with double parallel inputs. A major goal of the investigation is to extend the utilization of the OFRF method, which presented the explicit relationship between the cubic nonlinear damping parameters and output spectrum for the floating raft system. In order to obtain an ideal vibration isolation system, a low resonant frequency, the low transmissibility in the vibration isolation region and a large isolation range should be achieved. The requirements for the optimization design based on the isolation system were presented. Furthermore, the polynomial function of the power transmissibility, in terms of cubic nonlinear damping parameters, is determined and verified in the optimization design application. The design procedure is also provided, which facilitates the optimization design of the floating raft isolation system with double parallel inputs.
The structure of the paper is organized as follows. A brief introduction of the floating raft isolation system and some relevant concepts of the nonlinear characteristics are presented in Section 2. The power transmissibility and the OFRF representation of the floating raft isolation system are discussed, and the optimization design approach will be developed in Section 3. Then, the design requirements are proposed in Section 4. In Section 5, the detailed design application will be given, and the optimization design step is followed. Finally, the conclusions will be drawn in Section 6.
A floating-raft system with nonlinear damping characteristics
The 3DOF isolation system with double parallel inputs
Consider a vessel’s floating raft system simplified from a laboratory equipment as shown in Figure 1, where the diesel engine and generator are vibration sources. There are four vibration isolators under the diesel engine and generator, shown as green and red circles in Figure 1, respectively. Diesel engine, generator and other equipment are put on the middle support together. Six dampers depicted as blue triangle in Figure 1 are set under the middle support.

A vessel’s floating-raft system: (a) front view and (b) top view.
In Figure 1,
Symbols in Figure 1 are defined as follows:
The lumped-parameter model can be further established based on the floating raft system, where a double-input-single-output isolation system is illustrated in Figure 2.

The 3DOF lumped-parameter model of the floating-raft system.
The mass parameter

The stiffness values can be obtained as



The linear damping values are supposed to be proportional to the corresponding stiffness, that is

The differential equation
The Duffing equation of the three degree-of-freedom (3DOF) nonlinear isolation system with parallel freedoms can be denoted as

where
To conduct a general analysis, the input forces generated by the diesel engine and generator can be expressed as

is a sinusoidal type excitation acting on the rotating machines with frequency
The output force transmitted to the ground consists the spring force and restoring force of damping, and the nonlinear damping force can be described by a third-order terms, which can be evaluated as follows 9

Power transmissibility
The OFRF representation
Consider the class of nonlinear isolation systems, which are stable at zero equilibrium, can be represented in the neighborhood of the equilibrium as follows 20

where
The analysis method in the frequency domain presents a much more physically meaningful insight for the vibration characteristics of the nonlinear isolation system. The output frequency response of the nonlinear vibration isolation system in the frequency domain in terms of a sinusoidal input force

Where
The Fourier transform of the nth-order Volterra kernel can be decomposed as follows

The nth-order generalized frequency response function (GFRF)
The power transmissibility
The force transmissibility are usually employed in the analysis and design of a general isolation system. In the present study, effects of the whole excitation frequency range are taking into account in the optimization design process. As a consequence, the power transmissibility

where
According to Parseval’s theorem, that is, the power output spectra in the time domain is equal to the power spectra in the frequency domain. As a consequence, the power transmissibility in the frequency domain is given by

where
Define

According to equation (5), the Fourier transform

A more succinct polynomial function

As a consequence, the power transmissibility
The output frequency response of the floating-raft isolation system can be written as a polynomial function, which defines the relationship between the output spectra and nonlinearity constants, is given by 13

where
Substituting equation (16) into equation (15), the maximum values

where
The determination approach
The relationship between the output response and cubic nonlinear damping will be determined by taking advantage of the output frequency response function (OFRF) approach, and the optimization design is conducted regarding with cubic nonlinear damping in the following section.
In order to establish the relationship between the system nonlinear parameters and output power spectra, the polynomial function
The function

where the subscript

A series of sets of cubic nonlinear damping coefficients are employed to estimate the function
Nonlinear damping parameters for the estimation.

In Table 1, the nonlinear damping coefficients

Therefore, the power transmissibility

Equation (21) presents the explicit relationship between the nonlinear damping parameters and output power spectra. Furthermore, the relationship can provide the guidance for the nonlinear damping analysis and optimization design of the floating-raft isolation system with double parallel inputs.
Design requirements
The power transmissibility is always applied to measure the isolation performance and design a nonlinear vibration system. For the vessel’s floating-raft isolation system shown in Figure 2, the damping ratios are set as

The output power spectra of the isolation system with the linear damping where
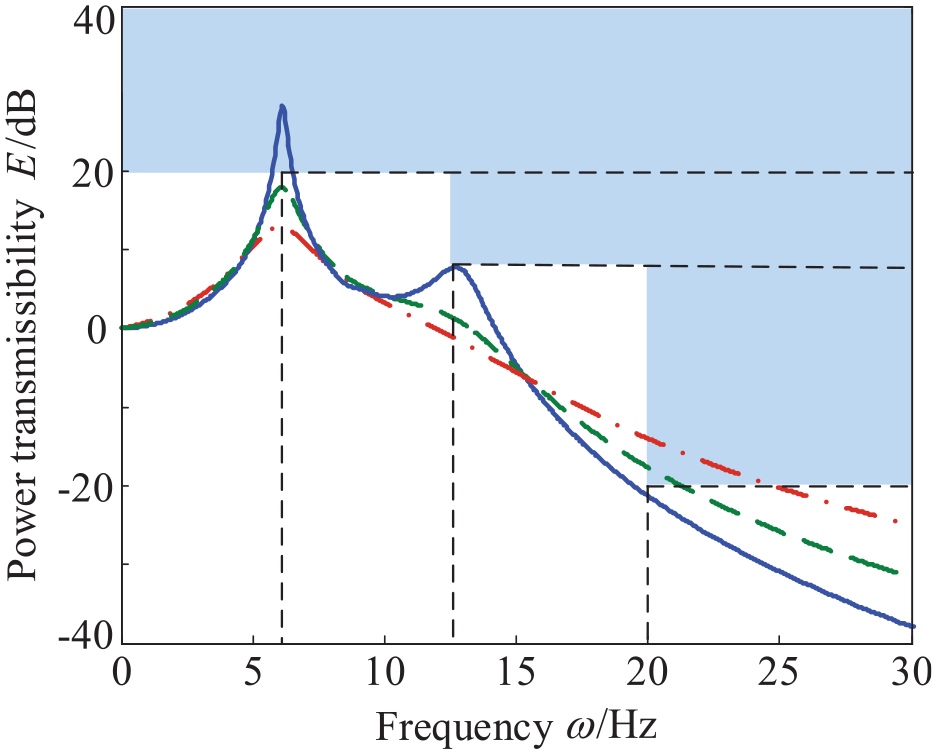
The design requirements regarding with the whole power transmissibility curve are introduced and defined as follows. The power transmissibility curve must lie in the white area depicted in Figure 3. The design requirements of the floating-raft system with double parallel inputs can be concluded as the following restrictions, which is applied to design nonlinear damping, is given by


The requirement (a) limits the power transmissibility at the resonant frequency, which can be easily achieved by increasing the linear or nonlinear damping. The requirement (b) restricts the power transmissibility over a high frequency range, which can be achieved by employing a low linear damping ratio. Therefore, the linear damping can not satisfy the requirements at the same time. The cubic nonlinear damping can not only suppress the transmissibility over the resonant frequency region but also keeps the transmissibility unaffected over the isolation region. Therefore, the nonlinear damping is crucial to the design of a floating raft isolation system.
The optimization design issue can be described as follows
Find

Solve the optimization issue under the restrictions (a) and (b).
The OFRF design application
The optimization design of the floating raft system is illustrated in this section, and the design procedure will be conducted to demonstrate the effectiveness of the OFRF method. The design process can be summarized in Figure 4, which can guide the optimization design for a more complicated vibration isolation system.

The optimization design steps of nonlinear isolation systems.
Based on the model parameters, the optimization requirements are depicted in Figure 3 where
Power transmissibility spectrum with linear damping where
Determining the order of nonlinear damping
Select the linear damping
The proper nonlinear damping will not increase the power transmissibility. Assuming that the floating raft isolation system without nonlinear damping, a little strong linear damping should be adopted in order to achieve the requirement (b). For the floating raft isolation system, many solution results of the linear damping can be obtained. Therefore, the linear damping coefficients are simply determined by simulation. According to Figure 5, the linear damping coefficients can be selected as
Find
sets of nonlinear damping coefficients
The nonlinear damping relation
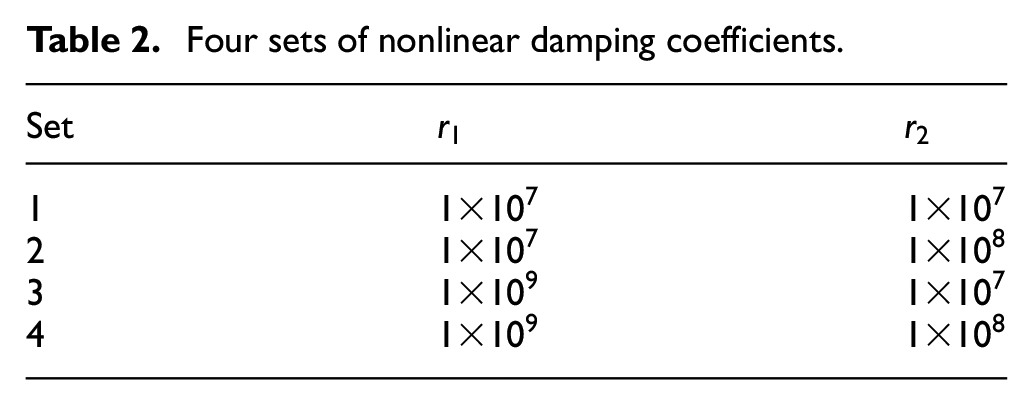
Four sets of nonlinear damping coefficients.
Power spectrum
The power transmissibility spectrum can be obtained and depicted in Figure 6 by employing the nonlinear damping coefficients from Table 2 over the frequency range.

The power transmissibility with nonlinear damping parameters taking values from Table 2.
Calculate the coefficients
j1,
j
2
,
j
3
(jω)
The power transmissibility
Validate the coefficients
j1,
j
2
,
j
3
(jω)
Take the nonlinear damping

Comparison between the OFRF approach and simulated system.
It is clear that the power transmissibility with the OFRF approach is approximate to the transmissibility of the simulated system over the frequency range.
Find the maximum frequency ω1max, ω2max
The appropriate cubic nonlinear damping can keep the resonant frequency unaffected for the floating raft isolation system.
14
The resonant frequencies of the isolation system are
Estimate the nonlinear damping
According to requirement (a) and equation (21), yields

The factor 0.9 is compensate for the uncertainty of the resonant frequency. Combining with the results of step 5, the nonlinear damping parameters can be calculated as


It is obviously that the first set of solution equation (24a) is impossible with the isolation system. Therefore, equation (24b) is the optimization solution for the floating raft isolation system.
If there is not an appropriate solution, repeat step 2 and select a bigger linear damping.
Check the OFRF design results
The power spectrum of the OFRF results can be shown in Figure 8 with the nonlinear damping equation (24b).
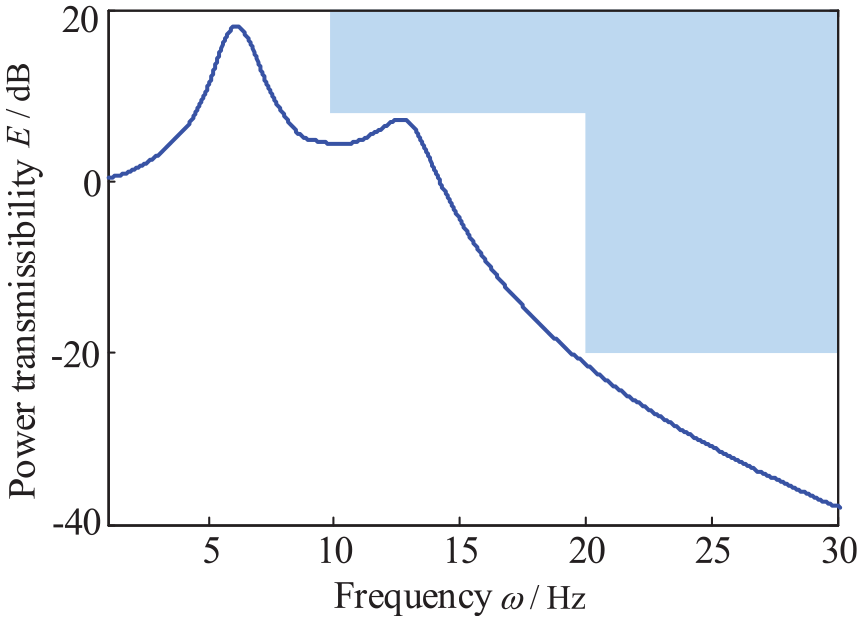
The power spectrum of the OFRF optimization design results.
It is observed that the power spectrum is satisfied with the design requirements from Figure 7.
Conclusions
The output frequency response function approach (OFRF) has demonstrated significant advantages in the design of a single degree-of-freedom isolation system with the cubic nonlinear damping. However, for a floating raft isolation system of multiple degree-of-freedom with double parallel inputs, the advantages for optimization design have not been revealed by applying the OFRF approach. In the present study, the detailed conclusions are given as follows:
(1) The new determination approach of the power transmissibility in terms of the cubic nonlinear damping characteristics is developed, which can present a polynomial relationship that facilitates the analysis and design of the floating raft isolation system.
(2) In order to achieve the low resonant frequency and power transmissibility in the isolation range, the design requirements are proposed in the whole frequency range. The optimization design steps were summarized as the flowchart.
(3) A detailed design procedure is conducted to determine the linear and nonlinear characteristics, and the function relationship is also determined between the power transmissibility and nonlinear parameters. Simulation results indicate that the design approach can readily achieve the ideal isolation performance. The design approach can be easily applied to a wide class of floating raft systems by adapting the isolation system parameters.
Footnotes
Appendix
Notation

| Variables | Description |
|---|---|
| and | masses of the middle support and other equipment, respectively |
| and | masses of the diesel engine and generator, respectively |
| , , and | stiffness values of the left, middle, and right vibration isolators under the middle support, respectively |
| and | support stiffness of the diesel engine and generator, respectively |
| , , and | damping coefficients of the left, middle, and right vibration isolators under the middle support, respectively |
| and | damping coefficients of vibration isolators under the diesel engine and generator, respectively. |
| and | input forces of the diesel engine and generator, respectively |
| output force transferred to the ground | |
| , , and | cubic nonlinear damping parameters |
| , , and | mass matric, damping matric, and stiffness matric |
| , , and | displacement, velocity, and acceleration vector |
| nonlinear damping force vector | |
| input force vector | |
| power transmissibility | |
| , , and | damping ratios |
| isolation frequency | |
| , , and | orders of the nonlinear damping , , and |
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Youth Innovation Promotion Association Foundation of the Chinese Academy of Sciences (grant no. 2020205).