
Abstract
When a vehicle is driving, the most significant source of oscillations is the irregularities in the surface of the road. An active suspension is utilized to enhance the vehicle’s stability and ride comfort. In this work, the dynamic model with multi variables is considered to simulate vehicle oscillations based on four excitation cases from the road surface. In addition, this research also established the AFSP complex control solution for an active suspension system. This is a completely novel algorithm with many outstanding advantages. The final control signal of the system is synthesized from the signals of the linear controller PI (Proportional – Integral) and the nonlinear controller SMC (Sliding Mode Control). The controller’s parameters will change continuously depending on the established fuzzy rule. According to simulation outcomes, the vehicle body displacement and acceleration dramatically declined when the AFSP algorithm directed an active suspension. The values of acceleration and displacement do not exceed 80% and 20%, compared to the scenario in which the vehicle just utilized the typical passive suspension system. Besides, a phenomenon of “chattering” also does not appear when combining the controllers. Overall, the efficiency of this algorithm is high. This algorithm can be applied to more complex models.
Keywords
Introduction
The stimuli on the road are the most essential reason for oscillations for the vehicle when moving. These oscillations can negatively impact passengers, cargo, and the life of the automobile. The suspension system is utilized to ensure that an automobile’s oscillations do not exceed the limit threshold. 1 Suspension systems used in automobiles are diverse, such as mechanical suspension (passive suspension), active suspension, semi-active suspension, and pneumatic suspension. 2 A conventional mechanical suspension system has a basic structure and a low price and is now used on most popular cars. Typical components of a mechanical suspension system include coil springs (or leaf springs, torsion bars), dampers, and lever arms (upper arm and/or lower arm). 3 Besides, the stabilizer bar can also be considered a suspension system component. 4 The passive suspension system can only meet the oscillation requirements under normal conditions. In special situations, loss of ride comfort can occur if an automobile utilizes only this suspension system. Its property is constant (fixed) for a conventional passive suspension, although the characteristic curves of the components can be linear or nonlinear. Therefore, it cannot respond to constantly changing external stimuli. To improve this, an air suspension system with air springs, which can change stiffness using internal compressed air pressure, was used.5,6 In addition, a semi-active suspension with the MR damper is also used to better adapt to oscillations from the road surface.7,8 One of the most effective methods of responding to vehicle oscillation requirements is the use of an active suspension. 9 According to Omar et al., an active suspension’s actuator has the form of a hydraulic cylinder. The cylinder inside contains the servo-valve, which is driven via the control voltage signal. 10 An impact force produced by a hydraulic actuator will act on both masses of an automobile (for some other suspension systems, the actuator may be electromagnetic). So, the oscillation of a vehicle will decrease gradually. 11
Many studies on control problems for active suspension systems have been introduced in the last few decades. Trang and Lan 12 used PID (Proportional – Integral – Derivative) algorithm to control this system. This controller includes three stages corresponding to three coefficients, KD, KP, and KI. 13 These coefficients will be self-tuning or selected based on Ziegler–Nichols’s method. 14 However, the effectiveness of these methods is often low. Chen and Zhou 15 used the Fuzzy algorithm to tune the PID controller’s variables based on excitation signals from the road. Based on the principle of genetics, the variables of the PID controller can be optimally chosen by the GA (Genetic Algorithm) solution. This was done by Metered et al. 16 The size of the population and the number of generations will be determined based on the experience of the designer. 17 Different from the GA algorithm, the PSO (Particle Swarm Optimization) method helps optimize the controller’s coefficients based on the characteristics of the animals. 18 The animals used in this algorithm often have a herd lifestyle, such as whales, ants, bees, etc.19–21 Besides, many other intelligent algorithms have been used to search for the controller’s parameters optimally.22–24 The PID controller can only be applied to systems that have an object. If the system has many objects to be controlled, using multiple PID controllers is a suitable alternative. 25 For MIMO (Multi Input – Multi Output) systems, the Linear – Quadratic Regulator (LQR) controller can be used to replace the conventional PID controller. 26 This algorithm aims to minimize the cost function so the system can be more stable. 27 The mathematical model of this algorithm must be given in the form of a state matrix. 28 Once the Gaussian filter is combined with the LQR controller, it will be called an LQG (Linear – Quadratic Gaussian) controller. 29 The above methods are only used for linear objects. If the object is nonlinear, more complex algorithms need to be used.
The SMC algorithm is often used for complex nonlinear objects. 30 Kazemian et al. 31 used the SMC algorithm to control the hydraulic actuator. To simplify the model, a linearization process of a hydraulic actuator should be done. This process is shown by Nguyen. 32 Then, a quarter-dynamic model that considers the influence of the actuator will have five state variables. 33 According to Zhao et al., 34 the sliding surface is an important component of the SMC controller. The controlled object can travel around the sliding surface in order to reach a steady state. 35 Notwithstanding, a “chattering” phenomenon can occur when this algorithm is used. This problem can make the control signal vibrate continuously with high frequency and a small amplitude.31,36 To limit this problem, a SMC controller must be combined with a PID controller or a Fuzzy controller. 37 For instance, Hsiao and Wang 38 introduced the design of an algorithm that combines SMC and Fuzzy, called STFSMC (Self-tuning Fuzzy Sliding Mode Controller). Another recommendation has been made by Suhail et al. 39 about using the ASMC (Adaptive Sliding Mode Control) algorithm. Overall, ride comfort can be greatly improved if this method is used.40,41 Besides, many advanced control methods have been applied to the active suspension system, which also brings high efficiency.42–45
In this paper, vehicle oscillation is simulated using a quarter dynamic model. Besides, a hydraulic actuator is also considered in this model. To enhance the system’s stability, the AFSP integration algorithm is used. This is a new control algorithm that was proposed by the author. According to this proposal, the integrated controller’s control signal is synthesized between SMC and PI controllers. Moreover, the parameters of the PI controller are adjusted by a Fuzzy algorithm to respond to continuously changing external stimuli. So, it can work well even if the excitation from the pavement is linear or nonlinear. As a result, the efficiency in ensuring the stability and comfort of the vehicle when moving will be enhanced. This is considered a novel point in the paper, which brings some significant contributions to the field of automotive suspension control. The calculations and simulation are done by the MATLAB application. The main content of this work includes of four sections: introduction, method, results and discussions, and conclusions. These will be presented in the next sections.
Method
Vehicle model
A dynamic model needs to be established to simulate vehicle oscillations. This model consists of a sprung mass m1 and an unsprung mass m2 (Figure 1). There are two DOFs corresponding to the two masses, z1, and z2. The hydraulic actuator is responsible for generating the force FA.


Where:
Inertia force:

Spring force:

Damping force:

Tire force:


A quarter dynamics model.
According to Nguyen, 32 the impact force produced by an actuator can be simplified as follows:

Let five variables:

Taking into account the state variables’ derivatives:

The following is a description of the matrix that characterizes the oscillations of the system:

After the dynamic model describing the vehicle oscillation has been established, the control algorithm also needs to be designed.
Control model
Considering the indeterminate SISO nonlinear system, let u(t) be the input signal and y(t) the output signal. An input-output model is described below:

Symbols for state variables:

Then, the equation (9) is rewritten as (11) where f(
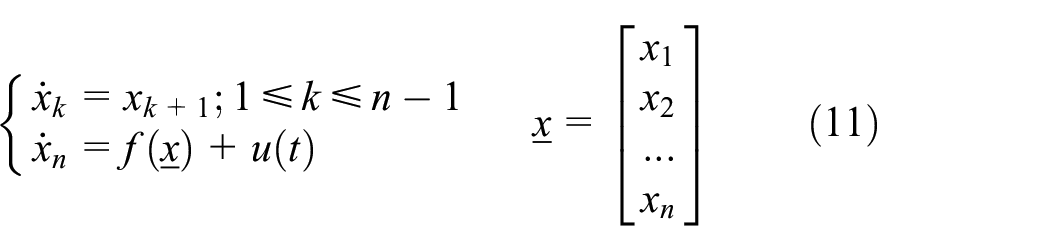
The function f(

When t > 0, the controller ensures that the closed system always has a free-state orbital x(t) with a limit. If the setpoint is zero, that is:

Where: e(t) is the error signal between the setpoint signal and the output signal.

Assume that s(e) is a smooth function. This function will depend on error signals e(t) of the system.

If the solution e(t) of the equation s(e) = 0 satisfies the condition (13), the function s(e) is called a sliding surface (Figure 2).


Sliding surface.
To simplify the problem, a constant parametric linear sliding surface is often used. Considering the sliding surface given in (17):

The roots of the equation (16) satisfy condition (13) if and only if coefficients ki of the equation (17) are the constants of the polynomial p(λ). Also, the polynomial p(λ) must be a Hurwitz polynomial.

For the system in order to be asymptotically stable, the sliding surface s(e) must approach zero, that is:

According to (11), (17), and (19), we have:
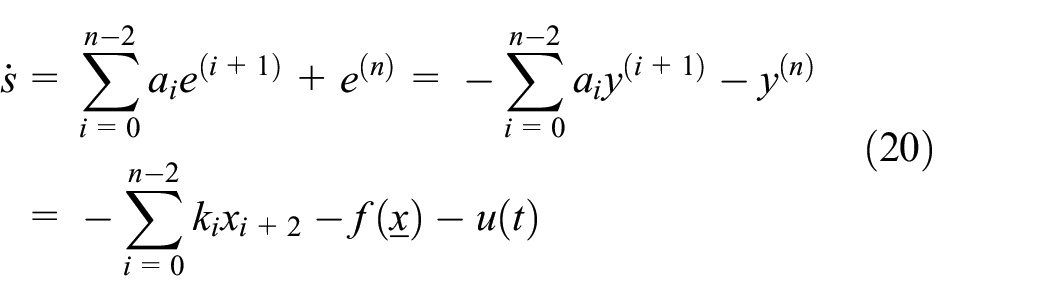
Condition (19) is rewritten as follows:

Combining (20) and (21), the sliding condition of the controller is shown in the formula (22).

In order to improve the system’s stability, the sliding mode controller will be combined with a PID controller. The PID controller includes three basic elements: proportional, integral, and derivative. Let v(t) be the input signal and q(t) the error signal of the system. The control signal of the PID controller is illustrated below.

The higher-order derivative signal can cause some unwanted disturbances. Therefore, this signal should be discarded if it is not needed. If the derivative stage is ignored, a transfer function of the system can be rewritten as (24):

The control signal of the integrated controller is determined based on the combination of the PI controller and the SMC controller.

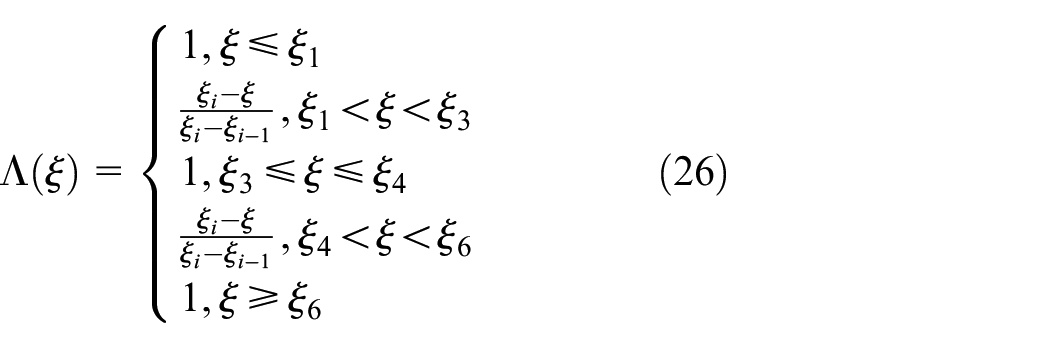
Figure 3 presents a control system diagram. To help the system respond well to the continuous change of external stimuli, the coefficients of the PI controller are adjusted by the fuzzy algorithm. According to the fuzzy theory, an intermediate state can exist to better respond to the flexible change of oscillation states. The membership function of the fuzzy controller is illustrated in Figure 4. Many views deal with the problem of selecting and establishing the membership function for the system. The membership function that is used in this research is established by the author based on some opinions as follows: + In the vehicle’s state with small oscillations (ξ3÷ξ4), the control signal needs to be small or non-existent. + When the car vibrates more strongly (ξ1÷ξ3 or ξ4÷ξ6), the control signal must be changed accordingly (increase or decrease). + The membership function values will be re-calibrated after each test simulation to give suitable final values.
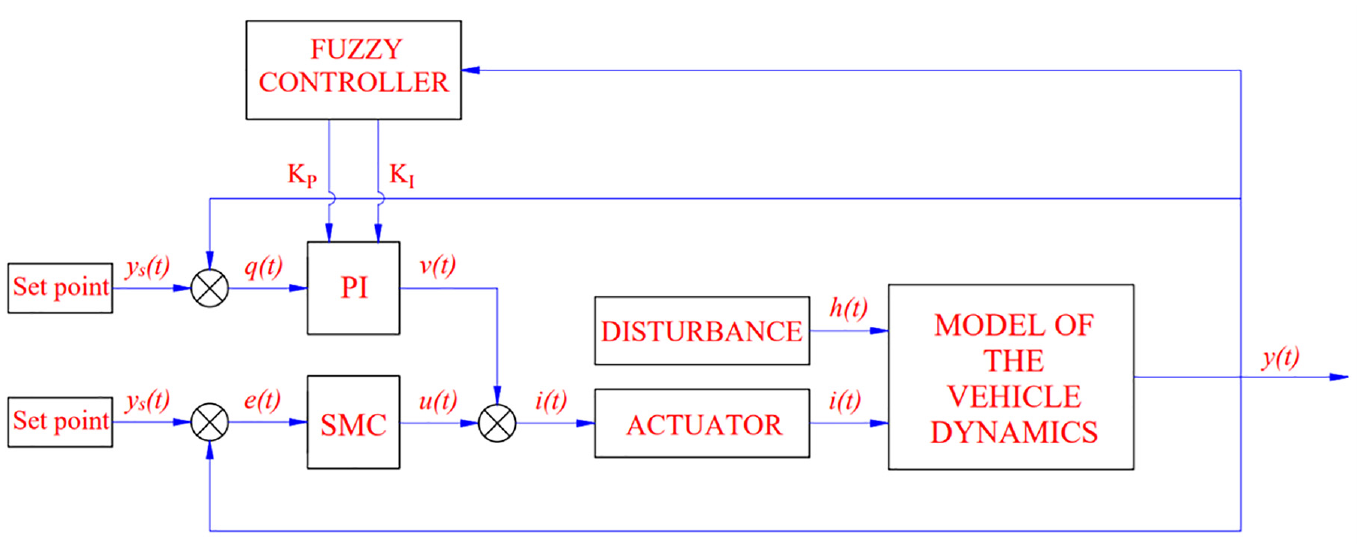
Schematic of the AFSD algorithm.

Membership function.
The defuzzification process is performed according to the rules as shown in the equation (26).
Once the integrated controller has been designed, simulation should be carried out. MATLAB-Simulink is the environment in which this procedure is carried out.
Result and discussion
Conditions
In this work, the oscillation source is the road surface excitation. While moving down a road, a vehicle may come into contact with various forms of stimuli. To simulate oscillations comprehensively, this paper uses four excitation types, as shown in Figure 5. These are common excitation forms commonly used in oscillation and control problems for suspension systems. Equation (27) describes the pavement excitation for the first case and the second case, while equations (28) and (29) describe pavement excitation for the other two cases in order.



Where:
h 0: Amplitude of oscillation
f: Frequency of oscillation
φ: Initial phase
G: constant
ω: White noise signal

Bump on the road: (a) first case, (b) second case, (c) third case, and (d) fourth case.
In the first two cases, the pavement excitation frequency and amplitude differ. This is to investigate the car’s oscillations when faced with different stimuli. In the third case, a trapezoidal pulsed excitation is used. The excitation acceleration will be much larger than in the above two cases. Therefore, this case is utilized to evaluate the smoothness of the vehicle when suddenly encountering single-pulse stimuli. Finally, a case involving random stimulation is used. This type of excitation has a high amplitude and frequency and is considered a realistic description of the road surface. The random excitation is generated from a white noise signal source, which is described by the equation (29).
In each case, three situations were examined: an automobile utilizing an active suspension with the AFSP algorithm, an automobile utilizing an active suspension system with the SMC control algorithm, and an automobile utilizing a mechanical suspension system.
The specifications used for a simulation are illustrated in Table 1. The γ1, γ2, and γ3 coefficients are referenced from Nguyen and Nguyen. 33
Reference coefficients.

Simulation result
Case 1
Within the first scenario, a sine-shaped pavement is used. This is a cyclic excitation with a small amplitude and frequency. Therefore, the vehicle oscillation also varies periodically according to this excitation signal.
The variation in the vehicle body displacement over time is seen in Figure 6. The vehicle body displacement is the largest when an automobile only uses the passive suspension, reaching 54.09 mm. Displacement will be reduced if the car uses the active suspension mentioned above. The maximum values for the other two situations are 24.03 and 10.83 mm, respectively. The changing trend of all three curves is similar to that of the excitation signal from the road surface. For continuous oscillations, the mean value should be considered. This value is determined according to the RMS (Root Mean Square) of three situations: an automobile has an active suspension with an AFSP controller, an automobile has an active suspension with the SMC controller, and an automobile has only a mechanical suspension system, reaching 7.58, 16.82, and 37.31 mm. This difference is quite large.

The change of displacement (sprung mass).
The value of a vehicle body’s acceleration is able to be used to measure the oscillations of the automobile. A change in acceleration is shown in Figure 7. In the first phase, the acceleration is very large, reaching 0.46, 0.66, and 0.81 m/s2, respectively, with three situations examined. This value will gradually decrease and oscillate periodically in the following phases. When an active suspension system is utilized on the automobile with the AFSP algorithm, the mean acceleration value is only 26.32% compared to the car using a conventional mechanical suspension system (100%) and an active suspension with the SMC algorithm (47.37%). So, the automobile’s smoothness has been significantly increased. Compared with the results in some previous studies,46,47 the automobile’s oscillation simulated in this paper has a more accurate oscillation phase. In addition, the chattering phenomenon is almost non-existent compared to the results in Moghadam and Kebriaei. 36 This helps demonstrate the new algorithm’s positive performance, which is proposed in this study.

The change of acceleration.
In some exceptional cases, the hydraulic actuator can generate a significant impact force, which causes instability of the unsprung mass. However, this did not happen once the AFSP algorithm was used to direct the active suspension. According to Figure 8, the displacement of the unsprung mass for all three situations is similar (the difference is tiny).

The change of displacement (unsprung mass).
Case 2
In the above case, the oscillation is still quite small. Therefore, the stable performance of the system has not been fully determined yet. To determine this, oscillations of greater frequency and the amplitude need to be used. In the second case, the sine-shaped pavement continues to be used. However, the amplitude and frequency of the oscillations have been enhanced.
As the amplitude of the excitation increases, the sprung mass displacement value also increases rapidly (Figure 9). Like the case above, vehicle oscillation is minimal when the AFSP algorithm is used to control a modern suspension. Its maximum values and mean values are only 21.65 and 15.36 mm, respectively, only about 17.09% (126.66 mm) and 18.73% (82 mm) compared to a situation of an automobile utilizing a mechanical suspension. Meanwhile, the values obtained using the SMC algorithm are 48.07 and 33.96 mm, respectively, reaching 37.95% and 41.41%.

The change of displacement (sprung mass).
A change in acceleration with time also tends to be similar to the case above (Figure 10). The maximum value and mean value determined according to the RMS criteria of three situations are: 1.35, 1.97, and 2.42 m/s2; 0.17, 0.35, and 0.84 m/s2.
The change of acceleration.
Similar to the above case, the difference in the displacement of the unsprung mass in the second case is also very small (Figure 11). Besides, this value is slightly smaller if the car uses active suspension instead of passive suspension. In general, the smoothness and stability of the vehicle are always guaranteed.

The change of displacement (unsprung mass).
Case 3
The control system is considered responsive if and only if the control signal appears and ends with the excitation signal (the time difference is extremely small). In some cases, when the excitation signal from the pavement has ended, the control signal is still maintained. This will cause system instability. To evaluate this responsiveness, a single pulsed excitation was used.
According to the results shown in Figure 12, the vehicle body will return to its original position as soon as the excitation signal ceases to exist if the automobile uses a modern suspension (including AFSP and SMC). In contrast, if a conventional suspension system is used, the vehicle body oscillation continues for a small amount of time, about 1.8 s. Besides, the maximum displacement and acceleration values greatly decline when an AFSP algorithm is used, reaching 21.65 mm and 1.35 m/s2. Meanwhile, the values of the other two cases are 48.07 mm and 1.97 m/s2 for SMC; 126.66 mm and 2.42 m/s2 for passive. These findings are illustrated in Figures 12 and 13, respectively.

The change of displacement (sprung mass).

The change of acceleration.
The value of the displacement of the unsprung mass in the third case is completely followed by the excitation signal from the pavement. This value is almost no different, even when the car uses active or passive suspension (Figure 14).

The change of displacement (unsprung mass).
Case 4
The roughness of the road is the random form in the last case. This is a common form when an automobile is traveling on the road. With this excitation form, the vehicle’s oscillations will change continuously at a quite high frequency and value. This can negatively affect the vehicle’s comfort.
According to the findings presented in Figure 15, the maximum and mean values of the vehicle displacement when an automobile only utilizes the mechanical suspension are 98.83 and 36.70 mm. If an automobile uses an active suspension directed by the SMC algorithm, this value is reduced to 32.83 and 11.88 mm. These values can be further reduced if the AFSP solution is utilized to direct the hydraulic suspension system. These values can reach 15.07 and 5.68 mm. These are very small oscillations and do not affect the vehicle’s comfort when traveling.
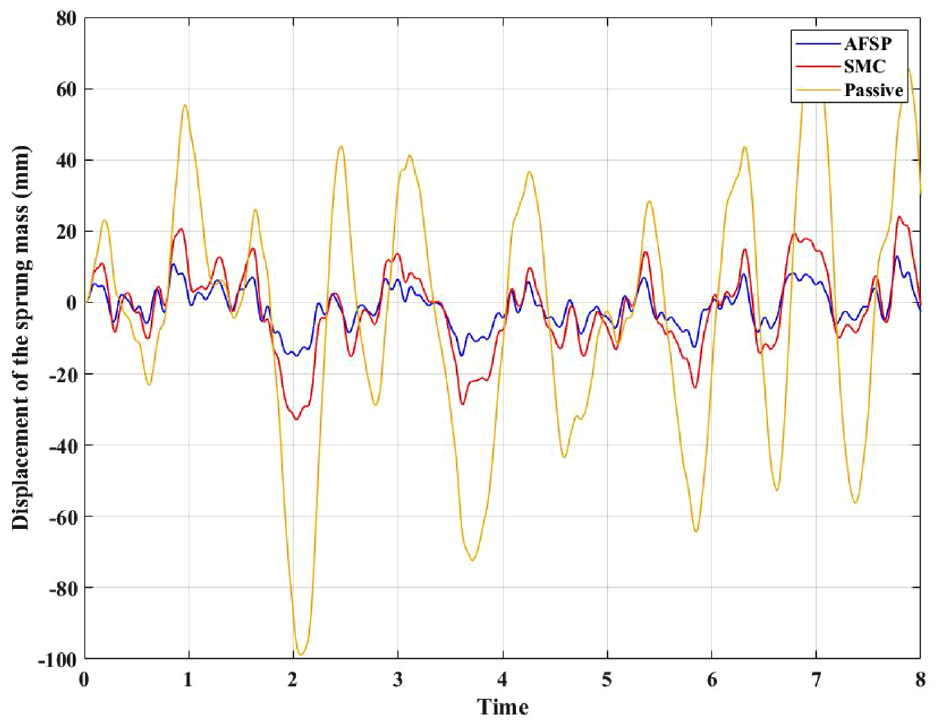
The change of displacement (sprung mass).
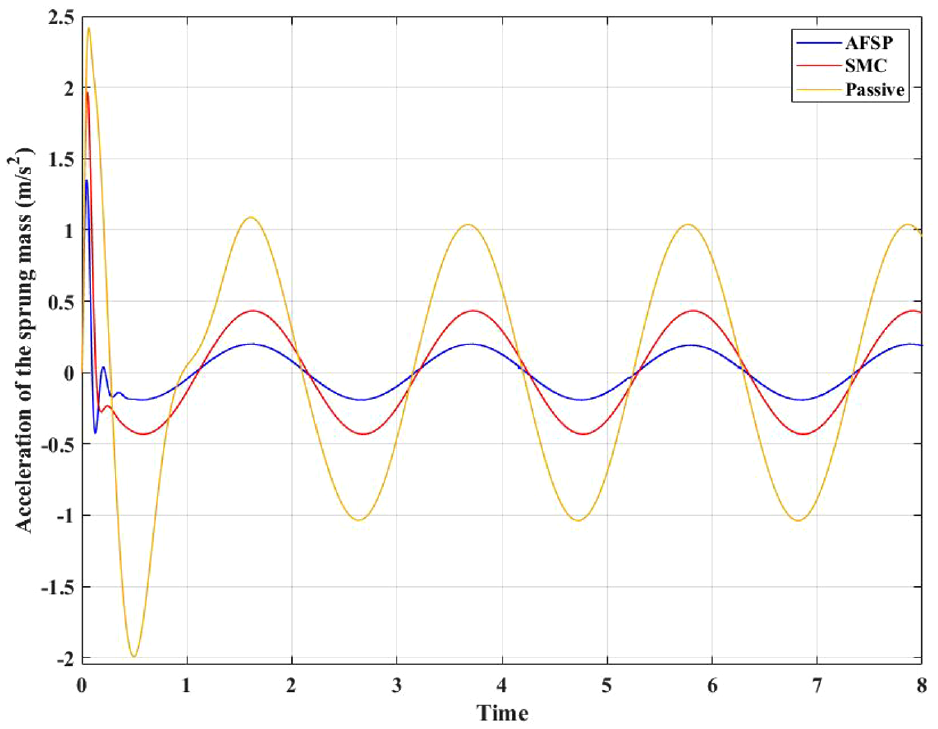
In this case, the vehicle body acceleration is very large (Figure 16). It can go up to 11.04, 10.91, and 8.63 m/s2. The ride comfort can be better-guaranteed thanks to the modern active suspension system with the AFSP method.

The change of sprung mass.
Finally, a result that describes the displacement of the unsprung mass is shown in Figure 17. In general, there is not a big difference between the situations. It can be understood that the oscillation of the unsprung mass will not be affected once the vehicle uses active suspension.

The change of displacement (unsprung mass).
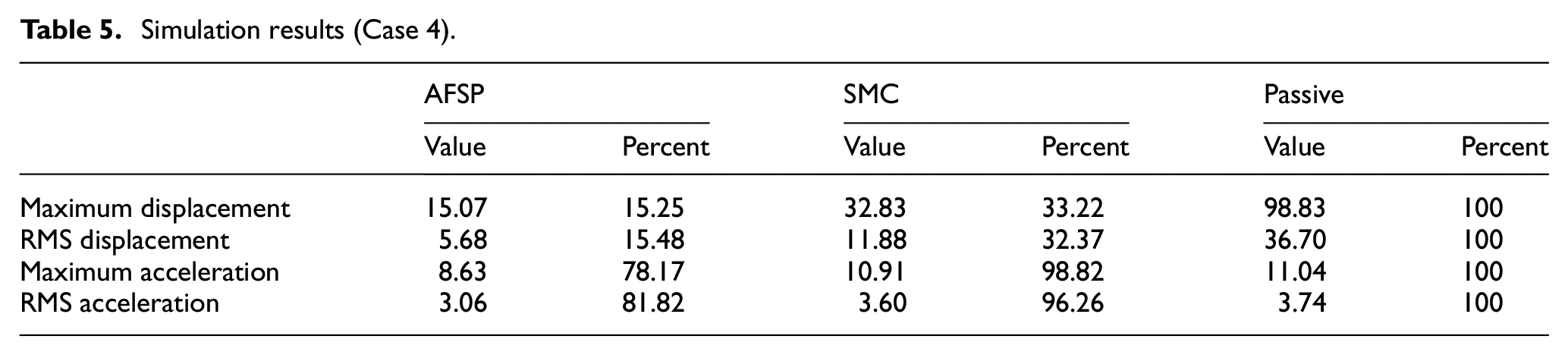
The outcomes of the calculation process are listed in Tables 2 to 5.
Simulation results (Case 1).

Simulation results (Case 2).

Simulation results (Case 3).

Simulation results (Case 4).
The percentage change of the values is given as shown in Figure 18.

Percent of the values: (a) first case, (b) second case, (c) third case, and (d) fourth case.
Conclusion
Vehicle oscillations have an important influence on passenger comfort and the quality of the merchandise. Several factors might cause a vehicle to oscillate, but road surface irregularity is the most prominent factor contributing to this phenomenon. An active suspension with hydraulic actuators is utilized to enhance the automobile’s comfort when traveling. The system’s stability depends entirely on the control algorithm utilized to direct an active suspension.
This research uses the dynamic model with five state variables to describe vehicle oscillations. Where a hydraulic actuator is taken into account as one state variable of this model. The proposed AFSP algorithm is used for this model. This is a novel and complex model. The variables of the PI controller can be changed continuously by the fuzzy law. The control signal is determined based on the output signal of the PI controller and the SMC controller.
The findings of this research have shown the outstanding advantages of the AFSP solution. According to this result, the maximum values, as well as the mean values determined according to the RMS criteria of the sprung mass displacement and acceleration, have been greatly reduced compared to other investigated situations. In addition, the reaction of the control signal also follows the excitation signal from the road, which causes the automobile to oscillate. The automobile’s comfort and stability have been increased when the car utilizes the active suspension system with the AFSP control solution. The new contributions of this algorithm are entirely positive and help further to confirm the outstanding advantages of the AFSP algorithm.
Footnotes
Appendix
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.