
Abstract
Given the low space usage rate of the traditional automated storage/retrieval system and the long aisle, it is easy for a stacker to take a long time to enter/leave the warehouse. Thus, a new type of double-ended compact storage system is proposed. This paper addresses the scheduling problem for the stacker to execute the single and dual commands mixed tasks in the system where the I/O ports are located at both ends of the aisle, and the power conveyor devices on the rack can meet the requirement of multi-depth storage and generate displacement. An improved shuffled frog leaping algorithm (ISFLA) is developed for the scheduling problem. In order to eliminate the disadvantages of local optimum and slow convergence in the standard shuffled frog leaping algorithm, a set of hybrid perturbation update methods are designed based on a role model learning strategy, and the feasibility of the improved algorithm is verified by a numerical simulation. The experimental results show that the solution quality and the convergence ability of the ISFLA are significantly improved, and it can effectively solve the stacker-scheduling problem in the double-ended compact storage system.
Keywords
Introduction
As an important part of manufacturing enterprises, an automated storage/retrieval system (AS/RS) is an important factor to maintaining market competitiveness because of its accurate and fast warehousing management technology. With the continuous progress of intelligent warehousing technology, enterprises are constantly improving the work efficiency and intensity requirements of automated 3D warehouses. The increasing production demands are difficult to meet using the traditional warehousing system. 1 Moreover, the continuous expansion of urbanization has led to a continuous decline in land supply, increasing land and labor costs. All these factors prompt enterprises to seek more compact and efficient warehousing systems. 2 The emergence of the compact warehousing system effectively solves these limitations. The system still uses a traditional automatic stacker to complete the cargo storage/retrieval task, which is used to realize the horizontal and vertical movement of the goods. However, in the depth direction of a storage rack, there is a power conveyor device to help realize the deep displacement of the goods, which is different from the traditional AS/RS, which can only realize single-deep or double-deep storage. The compact AS/RS can realize the multi-depth storage of goods. 3 This study reports a compact 3D warehouse considering a double-ended layout. Under the same space conditions, the system will have more storage units, lower cost, and higher flexibility and throughput. Therefore, it has been applied more widely.
Because of the novelty and complexity of the system, the research of many scholars at home and abroad on compact storage systems has primarily focused on model analysis4–6 and rack design,7,8 whereas the research on scheduling optimization is still in its infancy. As the most important transportation tool of the system out/in operation, the stacker has high practical value and research significance to optimize its scheduling to improve operational efficiency. The following can be performed by summarizing the literature on traditional AS/RS stacker scheduling to seek a research perspective for compact storage systems.
The research on stacker scheduling of traditional AS/RS primarily includes job path optimization and order task sequencing optimization. Hsu et al. 9 established the optimization model of the job path of the stacker under the condition of different storage scales and order quantity and proposed that the order batching approach based on a genetic algorithm (GA) can effectively solve the large-scale picking optimization problem. Tanaka and Araki 10 examined the routing problem for unit-load AS/RSs under the shared storage policy and proposed an algorithm based on a general mixed integer linear programming solver. Kung et al. 11 considered a shared aisle with multiple stackers as the primary research problem. The authors established a dynamic programming model with the shortest travel distance of the stacker. They used a fast order scheduling method to solve the problem, which improved the sorting efficiency of the system. Dornberger et al. 12 examined the optimal picking order sequence problem in AS/RS to minimize the stacker’s travel distance when performing a single command (SC) task and solved the problem by changing the selection method and introducing an elitism mechanism in the GA. Popović et al. 13 examined an AS/RS with a triple-shuttle module in class-based storage and used GA to solve the order scheduling problem to minimize the stacker’s running time. Gharehgozli et al. 14 examined the scheduling problem of out/in operations in AS/RS and adopted polynomial-time algorithms to minimize the total travel time of the stacker when performing dual command (DC) tasks. Yang et al. 15 proposed a hybrid GA to solve the order task-sequencing problem in a dense mobile rack warehouse to achieve the shortest picking time for the stacker. In similar studies,16–19 the job path optimization model of the stacker was established with the shortest travel distance or the shortest travel time as the scheduling index. The problem was solved using standard heuristic algorithms or integer linear programming solvers. The optimization process primarily considered the number of equipment configurations, order batching, and other related factors.
Although many researchers have achieved significant results in the stacker-scheduling problem and proposed many heuristic and meta-heuristic algorithms, the following issues persist:
Most research objects were traditional storage systems with single I/O ports. When the number of I/O ports is increased, the I/O ports of the materials are no longer unique, or the established model is no longer applicable when there is a new displacement in the rack depth direction.
The scheduling model only considers the SC task of the stacker or its DC task, and the operation efficiency of the stacker cannot be brought into full play when the number of tasks in the order is increased or the number of I/O tasks in the order is not equal.
The algorithms used in the study were basically standard heuristic algorithms, which can fall into “prematurity” and have poor robustness.
For the stacker-scheduling optimization problem of a double-ended compact storage system, this paper comprehensively considers the allocation of the I/O port and the displacement in the depth direction of the rack, establishes the scheduling time model for the stacker to perform the SC/DC mixed operation tasks, and designs a new shuffled frog leaping algorithm (SFLA). SFLA is a metaheuristic algorithm based on memetic evolution; its main advantages are fast convergence speed and effective algorithm structures involving local search and global information exchanges. 20 The algorithm has been widely applied to several optimization problems, including economic load dispatch, 21 vehicle routing,22,23 component sequencing,24–26 and shop scheduling.27–29 However, the initial solution will be distributed unevenly in the feasible region, resulting in a weaker global optimization ability, because the initial population of the SFLA is generated by a random method. In addition, only the worst individual frogs of the subpopulation are updated during the evolution process without considering the optimal frog position, and it is easy to fall into the local optimization. The wide applications of SFLA and related improvement strategies can help solve the stacker-scheduling optimization problem, which motivated us to consider the stacker-scheduling problem in a double-ended compact storage system and apply some new principles to design SFLA for the problem. Firstly, an iterative method for collectively generating new solutions is designed by introducing a model learning strategy, which generates an initial frog population with good fitness, and ensures the diversity of the population. A set of mixed perturbation update strategies are then designed by combining the model learning scheme to avoid the random updates that may occur in the worst frogs in the local search process. These strategies can improve the probability of obtaining high-quality solutions. Finally, the effectiveness and feasibility of ISFLA in time-efficiency and stacker-scheduling optimization are confirmed using simulation experiments.
The main contribution of this paper is to propose a new double-ended compact storage system and develop a new method to solve the stacker-scheduling optimization problem. The new system improves the storage space utilization and shortens the operational cycle, and the developed optimization method can accurately and quickly calculate the optimal path for the stacker to execute mixed operation tasks. The results obtained have great value and relevance in practical applications, which can guide managers to complete the layout design of the storage system and the planning of the stacker-scheduling path according to the storage environment and order information, and effectively improve storage efficiency.
The remainder of this paper is organized as follows. Section 2 describes the system model. Section 3 establishes the scheduling optimization model of the stacker. Section 4 designs an ISFLA to solve the model. Section 5 verifies simulation experiments, and the optimal scheduling path of the stacker is obtained using a numerical example. Finally, Section 6 gives a summary and further research directions.
System description and assumptions
System model
A double-ended compact AS/RS is composed of an automatic sorting subsystem (ASS), S/R machine subsystem (SMS), and compact rack subsystem (CRS). The ASS comprises RGVs, sorting platforms, and I/O ports, which are used mostly to sort outgoing unit loads or unit loads ready to be imported. The SMS responsible for storing and retrieving unit loads on the storage rack comprises an S/R machine and a straight guide rail. Finally, the CRS includes a compact storage rack and several storage units. Each storage unit has a power conveyor device, which primarily stores unit loads and moves them toward racks depth. The three subsystems work together to complete the load access tasks of the 3D warehouse. Figures 1 and 2 present this system.

Overall view of a proposed double-ended compact warehouse.
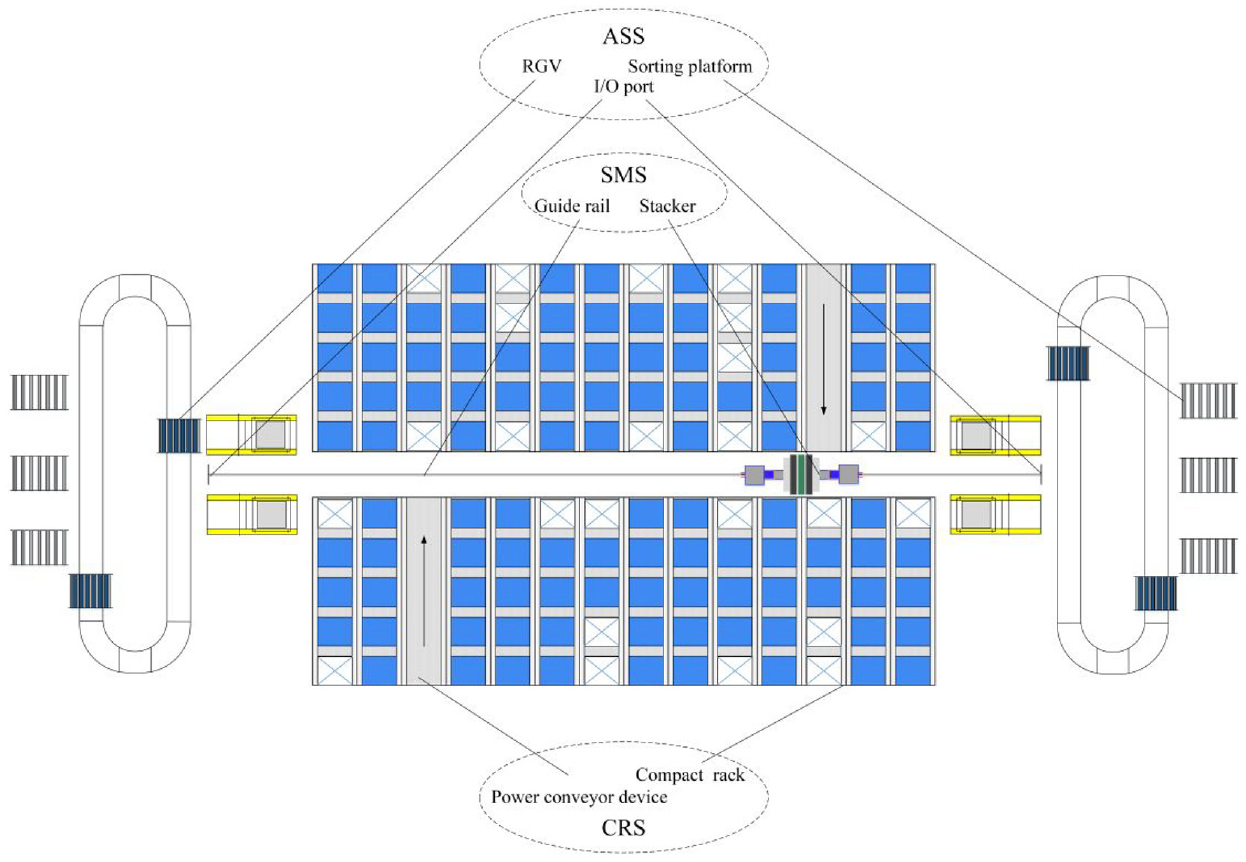
Top view of a proposed double-ended compact warehouse.
One aisle is produced for every two adjacent rows of racks in the system, and each end of the aisle is provided with an I/O port. The rack is designed with a compact storage unit, and each storage unit contains a power conveyor device, which can realize multi-depth storage and deep displacement of goods, as shown in Figure 3. Compared to traditional AS/RS, a double-ended compact 3D warehouse has the following advantages:
(1) High operation efficiency: The double-ended layout effectively reduces the walking time of the stacker in the aisle and improves the system’s operational efficiency.
(2) High storage density: A compact storage rack and power conveyor device design realizes multi-depth storage and expands the storage density of the system.
(3) Low input cost: The compact storage rack efficiently increases the storage density of the system while reducing the number of input stackers and the expense of using available land resources.

Schematic of the power conveyor device.
Analysis of operation mode of stacker
The stacker is usually operated in two modes: SC and DC operation. The SC operation is the single operation of the stacker to complete one storage or retrieval in a single operation cycle, and the DC operation is the compound operation of completing the storage and retrieval of the warehouse. 30 Figures 4 and 5 show the two operation modes. The number of storage and retrieval jobs in batch I/O task orders is often not equal. Although the efficiency of DC operations is higher, the stacker inevitably has to execute some SC jobs. Therefore, to improve the operation efficiency further, it is necessary to consider planning a more appropriate DC/SC task queue to minimize the time required for the stacker to complete the task of leaving/entering the warehouse. Aiming at the double-ended compact AS/RS, this study proposes a DC/SC mixed operation mode that is more in line with actual production, establishes the stacker’s I/O job scheduling model, and conducts optimization research on the system I/O port allocation, job sequence, and scheduling path.

Schematic diagram of the single command operation mode of the stacker.

Schematic diagram of the dual command operation mode of the stacker.
Assumptions and explanations
Given the related problems and principles that should be followed in the operation scheduling of a stacker in a double-ended compact 3D warehouse, which is convenient for model construction and problem research, the following assumptions and explanations can be made:
(1) Considering the symmetry of the racks on both sides of the aisle, the modeling and scheduling optimization process of this study only analyzes the single side rack.
(2) The target goods take the same time to be transported from the external starting point to both I/O ports and also the same time to be transported from both I/O ports to the specified delivery point.
(3) Let
(4) The stacker is defined as a single load operation, and its horizontal running speed is
(5) The running speed of the power conveyor device in the depth direction is defined as

Schematic of the location of loads to be sorted.
From the above assumptions and explanations, the time required for the stacker to run from a storage unit location

The waiting time for the stacker after arriving at the designated storage unit is

Optimization model of stacker-scheduling
Although there is a port at both ends of the warehouse for the stacker to access the material or cargo space, the corresponding I/O port is determined by the shorter travel time consumed by the stacker to perform the task, whether it is an SC or DC operation. Therefore, the total working time for the system to complete all order tasks can be defined as the sum of all SC and DC tasks completed by the stacker:

where
The time it takes for a stacker to complete an SC task can be expressed as

where
The time it takes for a stacker to complete a DC task can be expressed as follows:

where
Assume there are m storage and n retrieval operations in a batch of order tasks, and

where
Similarly, the time required for the stacker to complete all the DC tasks can be expressed as follows:

where
To summarize, the stacker’s overall working time to complete all order tasks in batches is

Therefore, when the double-ended compact 3D warehouse completes a batch of I/O orders, the optimal scheduling model of the stacker is as follows:

Subject to:




Among them, equations (10) and (11) are the port selection constraints of the stacker, which indicates that the stacker performs the task from the left port when
Design of scheduling optimization algorithm for stacker
When examining the path optimization problem of the stacker in the double-ended compact storage system, the computational complexity increases with the existence of both SC and DC operation modes and the increase in the number of related equipment. Finding the optimal solution in such a search space is difficult using conventional methods. Some standard heuristic algorithms proposed for the traditional stacker system do not guarantee solution accuracy and optimization effect. Therefore, based on the established stacker-scheduling optimization model, the ISFLA is designed to solve the problem and combined with the system process simulation to identify the optimal path scheme of the stacker.
Shuffled frog leaping algorithm
SFLA imitates the communication mechanism within the frog population in the process of foraging and finds the best location of food through information sharing among groups to obtain the optimal solution to the optimization problem. After generating the initial population, all frog individuals are sorted according to the order of fitness values, and the optimal individuals in the population are recorded. The population is then divided into multiple subpopulations according to the grouping strategy, and the best and worst individuals in each subpopulation are simultaneously recorded. The local search strategy of the subpopulation uses the leapfrog update formula to optimize the worst individuals. When the number of local iterations is updated, all frog individuals in the population are reshuffled and sorted, and the subpopulations are divided again according to the grouping strategy. The cycle is alternated and finally realizes the global information exchange.
The grouping strategy of subpopulations is as follows:

where JI is the frog individuals belonging to the i subpopulation; N is the number of subpopulations; n is the number of frogs in each subpopulation;
The worst individual update strategies in the subpopulation are as follows:




where
Figure 7 presents the step flow of SFLA. The key steps include population initialization, subpopulation division, local search, and global information exchange.
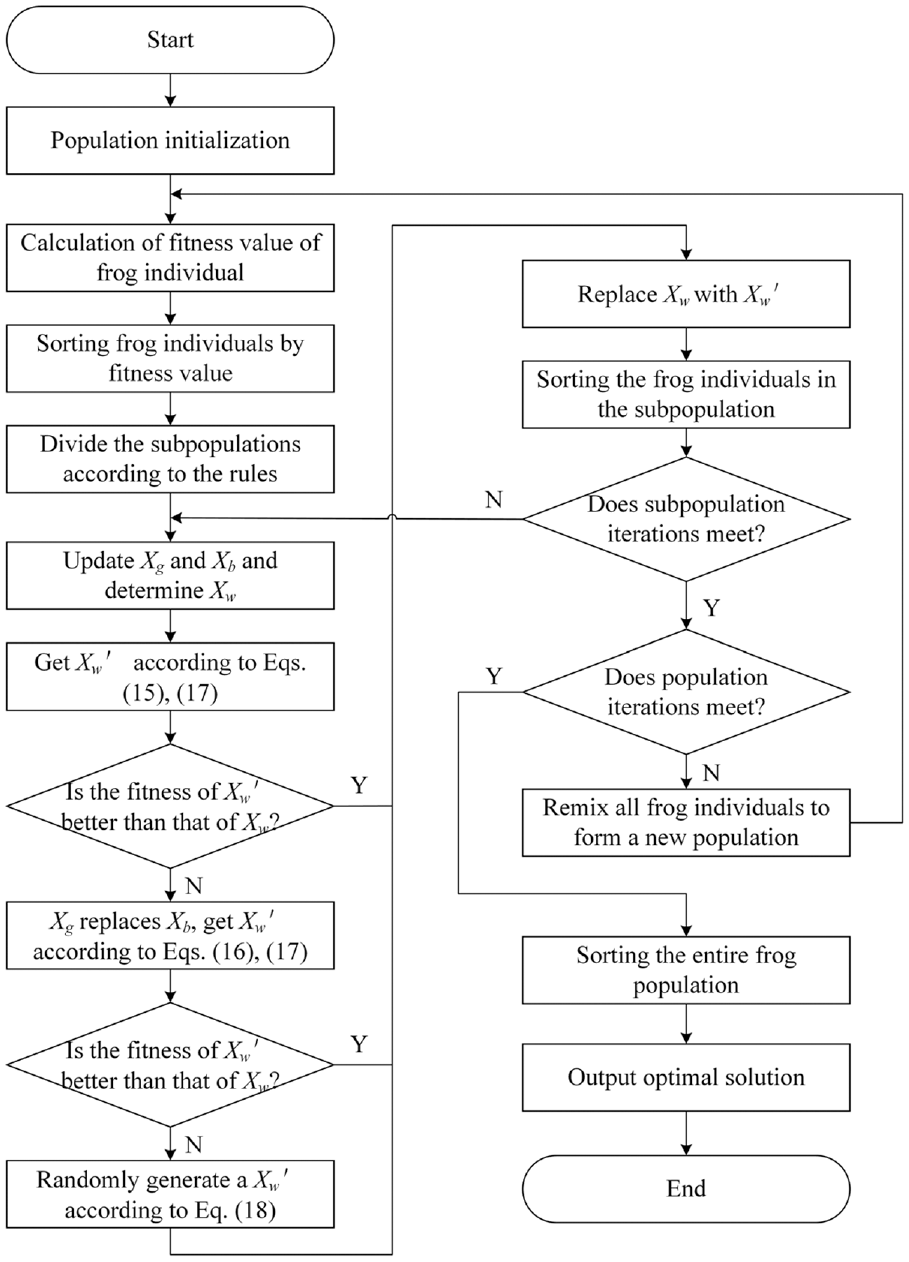
Flowchart of the shuffled frog leaping algorithm.
ISFLA
Based on the above description, the SFLA has a advantages of simple principle and exhibits ease of implementation. However, it has certain disadvantages such as slow convergence and easily falling into local optimization. The lack of a variation mechanism leads to a decrease in population diversity and reducing the probability of obtaining high-quality solutions. The local search only updates the worst individual frogs, and it needs to constantly adjust the number of iterations, resulting in the problem of slow convergence. To avoid these shortcomings, the ISFLA is proposed in this section. Furthermore, specific improvement strategies are presented.
Model learning strategy
The main principle of the model learning strategy is to allow poor individuals to learn from relatively better individuals to obtain an optimal fitness value. When considering several individuals in a population, the individuals with higher fitness value than that of the i individual are known as the role models of the i individual; all such role models together constitute the model group of the i individual. Consequently, the best individual in the population has no role model. The second-best individual has only one model in the population, and the worst individual cannot become a model. A frog individual

where
Differential perturbation update strategy
The introduction of the model learning scheme in the previous section shows that there is no model for the frog individuals with the best performance in the population. Therefore, this paper uses a differential perturbation update strategy (shown below) to update the optimal frogs in the subpopulation.

where
In equation (20), for the optimal frog in each subpopulation to assume a better position, using the mutation operator of differential evolution for reference, a differential vector related to the global optimal frog is added to the optimal frog feature vector in the subpopulation to form two groups of search methods based on differential mutations, one of which is guided by the global optimal frog
Direct perturbation update strategy
For the other frogs in the subpopulation, there are other models to learn from; thus, the direct perturbation update method shown below is used to update their position.

where
The direct perturbation update strategy is the fusion of two update methods based on local and global optimization in the standard SFLA. Based on equation (21), that the nonoptimal frog
Application of ISFLA in the stacker-scheduling optimization problem
Compared with the basic SFLA, the ISFLA creates a new way to generate new solutions within the subpopulation, thereby compensating for the defect wherein SFLA only updates the worst frog individuals in the local search, solving the problem of tedious updating steps, and increasing the probability of obtaining high-quality solutions. Simultaneously, as ISFLA does not need to set the number of iterations in the subpopulation or sort the frogs in the subpopulation, it reduces the computational complexity of the algorithm and improves its maneuverability.
Coding and decoding
When the above ISFLA is applied to the scheduling optimization problem of the stacker in the double-ended compact storage system, the task type must be coded before solving the problem. In this paper, the integer coding structure based on task number sorting is adopted, the storage tasks received by the stacker are numbered to form a coding section, and the retrieval tasks received by the stacker are numbered based on the storage task number to form another coding section. Any bit in the coding sequence represents a frog gene, and each gene consists of a set of numbers

Coding mode.
Decoding is the process of finding a reasonable sequence of I/O tasks according to their numbering order and the coding information corresponding to each I/O task. First, the number “0” is used to constitute the number of retrieval tasks; all storage and retrieval tasks are then paired according to the port information, and a set of continuous I/O task numbers are formed. As shown in Figure 9, 1→4→3→5→2 is a reasonable sequence of operations for I/O tasks.

Decoding mode.
Determine the fitness function
When ISFLA is used to solve the scheduling optimization problem of the stacker, the selection of a fitness function is made to evaluate the algorithm results simply and effectively. The fitness function is set to

Algorithm discrete operation
The stacker-scheduling problem of a double-ended compact storage system is a combinatorial optimization problem, and the solution space is discrete; thus, it is necessary to perform discrete operations on the update process of the algorithm when using ISFLA to solve the problem. The permutation sequences


where “⊕” is the combination of several permutation sequences; “−” is the position subtraction of two frogs, and the result is a set of permutation sequences;
Steps of ISFLA for solving stacker scheduling
The steps of the ISFLA for solving the stacker-scheduling optimization problem are as follows:
Step 1: Set the parameters; initialize the coordinates of all I/O tasks; calculate the running time between the two coordinates of the stacker performing any set of incoming and outgoing tasks; generate the time matrix.
Step 2: Initialize the frog population, and each frog is a reasonable coding sequence of integers consisting of (m+n) I/O tasks.
Step 3: The fitness values
Step 4: The frog population is divided into N subpopulations according to equation (14).
Step 5: The best individual
Step 6: Establish the model group of all nonoptimal frog individuals; select the model frog by Formula (19), and update the nonoptimal frog in the subpopulation by equation (24).
Step 7: Cross-boundary limits are imposed on each frog according to the time matrix in Step 1.
Step 8: Evaluate the fitness of each frog and replace other frogs in the subpopulation with elite frogs.
Step 9: Re-shuffle all the updated frogs into the frog population.
Step 10: All frogs in the population are arranged in descending order according to the fitness value.
Step 11: Output the optimal solution.
Simulation experiment research
The simulation experiment was conducted by taking the 3D warehouse used in a carton factory as an example. The 3D warehouse adopts the above double-ended compact layout design, and each row of racks was composed of 12 floors, 60 columns, and a total of
System operating parameters.

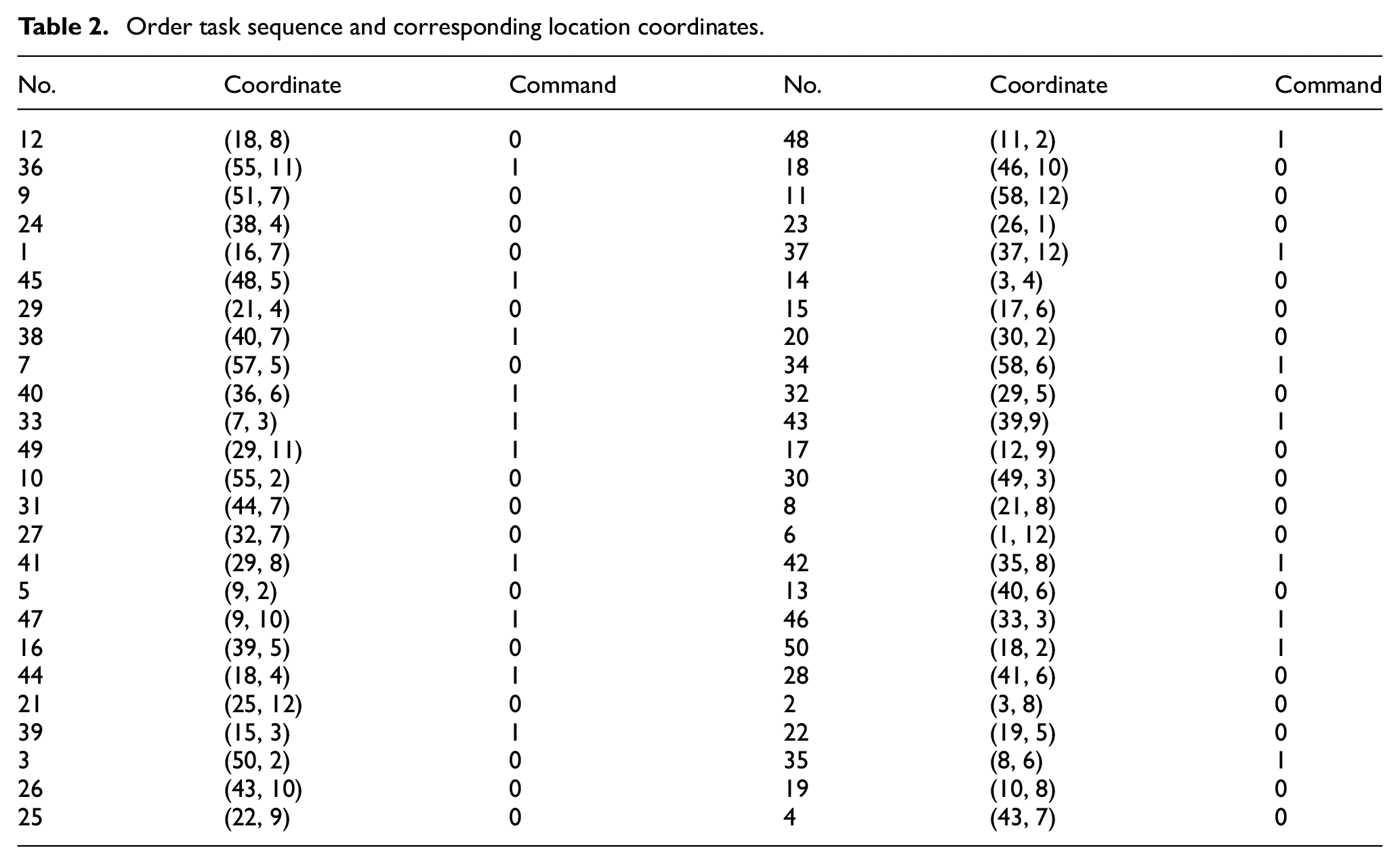
Order task sequence and corresponding location coordinates.
Optimal solution analysis
The experiments were conducted on 10, 20, 30, 40, and 50 order tasks an average of 30 times to explain the solving performance of ISFLA. The computer hardware configuration of the experimental platform is Intel Core i5-8300h 2.3 GHz 16 GB memory, which is performed under the Windows 10 operating system using the Matlab2018a development environment. The parameters of all algorithms are set as follows: population size was
Experimental results of the three algorithms under different numbers of tasks.

Table 2 shows that the storage and retrieval operations are six and four, respectively, when the number of tasks is 10. That is, the batch of I/O tasks contains four DC and two SC tasks. The corresponding numbers of all storage and retrieval operations are
However, as the scale of solving problems is increased, the solution quality of ISFLA is higher than that of SFLA and GA. When the number of tasks is 30, the average picking time of ISFLA is 46.86 s less than that of SFLA and 72.92 s less than that of GA (Table 3). When the number of tasks is 50, the average picking time of ISFLA is 92.49 s less than that of SFLA and 163.23 s less than that of GA. This shows that ISFLA has more advantages than SFLA and GA in solving the problem.
Furthermore, the running times of the three algorithms were compared. The running time of the algorithm is optimized because ISFLA overcomes the problem of tedious individual update steps in the standard SFLA and does not need to sort the frogs in the subpopulation. The average running time of ISFLA is shorter than that of SFLA and GA (Table 3), which shows that it can enhance the accuracy of the solution and ensure the speed of operation.
Convergence verification
To explain the solving characteristics of the ISFLA algorithm in more detail, the above scheduling optimization problem with 50 tasks was selected, and the number of iterations was 500. Figure 10 compares the operating processes of ISFLA, SFLA, and GA and the corresponding algorithm convergence diagram is drawn;

Iterative curves of the three algorithms.
Compared to SFLA and GA, ISFLA has great advantages in the iterative rate and quality of the solution (Figure 10). The GA gets the optimal solution after 247 iterations, which isis 1108.32 s. The optimal solution of SFLA is 1039.09 s after 286 times of execution. The optimal solution of the ISFLA is 949.07 s after 187 s execution, and the fitness value is no longer reduced. ISFLA has a faster convergence speed, higher convergence accuracy, and higher quality solution than the other two algorithms.
Optimal scheduling path of stacker
Figure 11 shows the scheduling path of the stacker in random access mode and solved by three algorithms. The sequence of I/O tasks and ports corresponding to the path obtained by ISFLA is the optimal scheduling scheme, as shown in Table 4.

Scheduling path diagram of the stacker: (a) scheduling path in the random access state, (b) scheduling path solved by GA, (c) scheduling path solved by SFLA, and (d) scheduling path solved by ISFLA.
I/O task sequence and its corresponding I/O port sequence.

1* and 2* in the table represent the left and right I/O ports, respectively.
After obtaining the optimal scheduling path of the stacker, the running sequence of the order task can be determined: 1*→21→37→2*→11→36→2*→26→49→1*→5→48→1* →22→39→1*→29→44→1*→14→33→1*→2→35→1*→ 17→47→1*→8→41→1*→25→43→2*→24→46→2*→16 →45→2*→27→42→2*→13→40→2*→4→38→2*→7→34 →2*→10→28→2*→30→2*→3→2*→31→2*→18→2*→9 →2*→20→50→1*→6→1*→19→1*→1→1*→15→1*→12 →1*→23→1*→32→1*.
The operation results of numerical simulation demonstrate that the stacker-scheduling optimization model established in this paper is suitable for the double-ended compact storage system, and the ISFLA can effectively solve the optimal task sequence problem for the stacker-scheduling path in the mixed operation mode.
Conclusions
This paper mainly presents a double-ended compact storage system and examines the stacker-scheduling optimization problem in the system. A scheduling optimization model for the stacker to execute DC/SC mixed tasks is established by analyzing the operation characteristics and actual workflow of related equipment, and the selection of the I/O port and the depth displacement of goods are comprehensively considered in the scheduling model, making the path optimization process of the stacker more reasonable. The ISFLA was designed to solve the existing problems, the update mode of only the worst frog individuals is changed in the standard SFLA, and a set of hybrid perturbation update methods are designed by combining a role model learning scheme; these changes improved the optimization performance and running efficiency of the algorithm. The simulation results show that ISFLA can get a satisfactory solution when considering different order scales, with good robustness. The superiority of ISFLA over SFLA and GA becomes increasingly prominent with the increasing scale of solving the problem, indicating that the improved algorithm can better meet the requirements of the stacker-scheduling tasks in the double-ended compact storage system.
Future research may be conducted on the following aspects. First, general cases with energy consumption and operating costs in the double-ended compact storage system may be worthy of consideration. Second, considering the acceleration and deceleration characteristics of related operating equipment in the scheduling model may get more accurate results. Third, a more effective solution can be further investigated for a more production task and batch I/O task sequence.
Footnotes
Handling editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article is supported by Zhejiang Science and Technology Plan Project (Grant No. 2018C01003), Natural Science Foundation of Zhejiang Province (Grant No. LQ22E050017), Postdoctoral Science Foundation of China (Grant No. 2021M702894) and Zhejiang Provincial Postdoctoral Science Foundation (Grant No. ZJ2021119).