
Abstract
Manipulators have attracted wide attention in recent years because they are simple and easy to control when grasping objects in space. However, there are not many theoretical researches on manipulator at present. Therefore, based on the principle of simple operation and low cost, a manipulator with high versatility, high flexibility, diverse movement modes, and shape adaptability has laid a solid theoretical foundation and practical significance for the innovative development of robot. In this paper, a 4-RRS& planar four-bar mechanism with bifurcation motion is proposed based on the finite screw theory. The degrees of freedom of the mechanism are analyzed by using the screw theory. Then the closed-loop vector method and instantaneous screw method are used to establish the analytical expression and the velocity Jacobian matrix between the motor actuation angle and the moving platform, respectively. Finally, on the basis of kinematic analysis, the SolidWorks and Matlab software are used to verify the kinematic simulation of the mechanism, so as to ensure the rationality of the mechanism motion and the correctness of the theoretical derivation.
Keywords
Introduction
With the continuous intensification of processing and production tasks in all walks of life, different products in different industries have different shapes, which are no longer simple and regular shapes. Different from traditional industrial robots, most of them are designed for some specific use requirements, and the number of joints and degrees of freedom of the matched end-effector are relatively small, and the operational flexibility is very limited. 1 Therefore, in the processing and manufacturing production line, the manipulator with higher flexibility, smaller volume, more intelligent, and shape adaptability came into being.
The discussion on designing multi-functional and more practical manipulators has gradually become the focus of today’s robot research field. 2 At present, most manipulators have the problems of high cost, complex structure, high control difficulty, and low flexibility. For example, after China successfully developed the BH-1 manipulator in the 1880s, it developed the second generation of Beihang BH-2 3 and the third generation of Beihang BH-34,5 in 1987 and 1998, respectively. The third-generation Beihang hand can grasp objects of different shapes, which has high adaptability, but it has certain limitations in flexibility. The UB II hand 6 and DIST multi-finger hand 7 were developed in Italy in 1992 and 1998. The LMS hand 8 was developed by theUniversity of Poitiers in France in 1998. Tokyo Hand multi-finger hand 9 and Ultralight were developed in Japan in 1999 and 2000 Hand manipulator, 10 Karlsruhe hand 11 developed in Germany in 2000, etc. These manipulators have more reasonable structure and better performance, but there are problems such as excessive output force, more complex control algorithm, high cost, which make the innovative research on the manipulator few.
At present, the research of manipulator is mainly focuses on synthesis of configuration, kinematic and dynamics analysis, and design of control system.12–23 Therefore, in view of the actual situation in the field of machining and manufacturing, this paper takes parallel mechanism as the research object, and proposes a control mechanism based on variable platform, 4-RRS& planar four-bar mechanism, in order to solve the problems existing in the current industrial parts processing line. The specific research contents are as follows (as shown in Figure 1): In Section “Type synthesis,” the topological structure design is carried out based on the finite screw theory, and the structural characteristics of 4-RRS& planar four-bar mechanism are described. Then, the degrees of freedom of the mechanism are calculated by using the screw theory. In Section “Kinematics analysis,” the closed-loop vector method is used to solve the relationship between the actuation angle and the moving platform, and then the instantaneous screw method is used to solve the velocity Jacobian matrix of the mechanism. In Section “Numerical example and simulation,” the kinematic simulation of the mechanism is carried out with the help of SolidWorks and Matlab software, and then the obtained images are compared and analyzed. The simulation results are completely consistent with the theoretical derivation, so as to verify the rationality of the mechanism motion and the correctness of the kinematic analysis.

Integrated framework for type synthesis and performance analysis of mechanism.
Type synthesis
Type synthesis, also known as topological structure design, refers to the determination of the type, number, geometric arrangement, selection of actuation pairs, and the geometric relationship between limbs in the motion chain of each limb given the number of degrees of freedom and the motion properties (rotation or translation) of the moving platform. The type synthesis methods of parallel mechanisms can be divided into two categories: one belongs to the motion level, whose core is that the motion of the moving platform is the intersection of the motions of all limbs, including the displacement group/manifold synthesis,24–29 differential geometry synthesis,30,31 Gf set synthesis, 32 linear transformation synthesis, 33 POC synthesis,34,35 etc. The other type belongs to the constraint level, whose core moving platform is constrained by the union of constraints of all limbs. The main mathematical tool used in this kind of method is screw theory, so it is called the constrained screw synthesis method.36–42
Most of the existing parallel mechanisms have isotropic output, but in some engineering practices, the mechanism is required to have anisotropic output, and the output attitude capacity of such mechanisms is very high. However, the existing methods cannot meet the requirements of type synthesis of high-demand mechanisms. Therefore, based on the finite screw theory, this paper proposes a 2R1T parallel control mechanism with shape adaptability, micro, high attitude ability, and bifurcation motion.
The continuous motion of the moving platform of the 2R1T parallel mechanism can be regarded as the intersection of the continuous motion of one or several different limbs, and the continuous motion of each limb can be divided into different joint motions. Therefore, the type synthesis process of the 2R1T mechanism (as shown in Figure 2) can be summarized as follows:
(1) According to the motion mode of the moving platform of the 2R1T mechanism, the finite screw of its continuous motion is established.
(2) According to the relationship between the continuous motion of the moving platform of the mechanism and the continuous motion of the limbs, the standard type of the required finite screw of the limb is determined.
(3) Based on screw triangle product, finite screw derivations of limbs were obtained by transforming the type and position of the kinematic pair, and the number, type and motion of the required limbs were determined according to the assembly conditions.
(4) According to the finite screw expression of the limb, the composition of the kinematic pair in the limb is obtained, and the type, position, and direction of each single degree of freedom kinematic pair are determined, to obtain the specific topology structure.
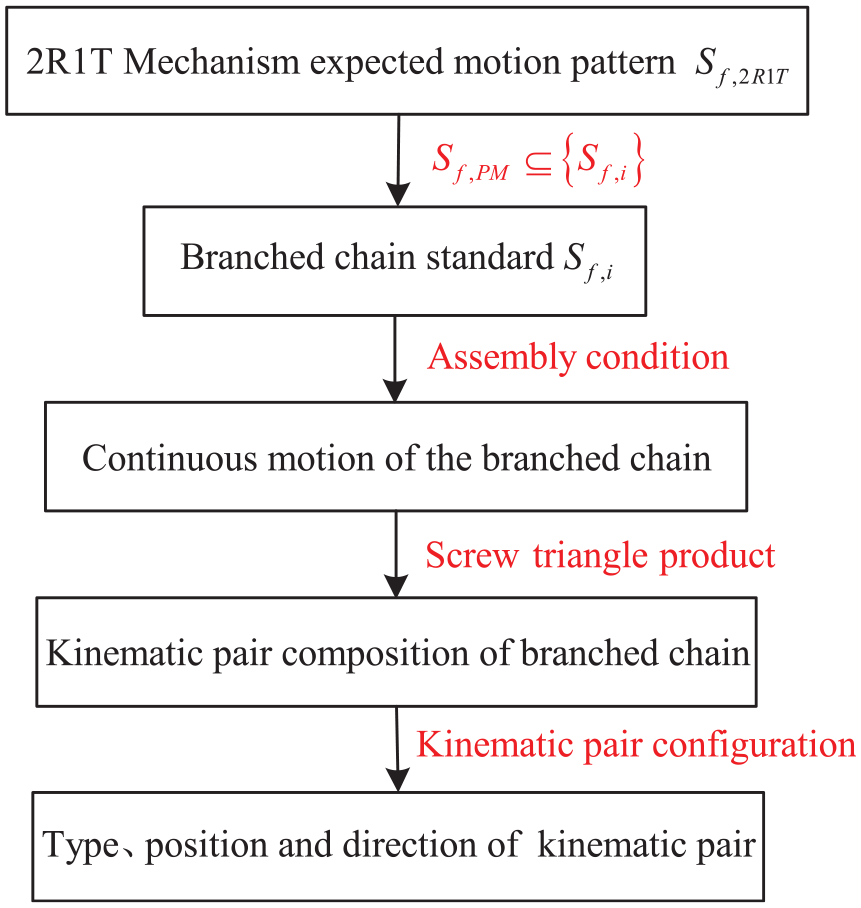
Type synthesis process of the mechanism.
Finite screw theory
In screw theory, for any finite motion, the Chasles equivalent axis is represented by
The finite motion of a rigid body can be described as the sum of a number of rotations and translations. In finite screws, the finite motion of the

Based on finite screws, the finite motion of the moving platform of a 2R1T parallel mechanism can be described as

where the symbol “
The canonical form of the limb finite screw

where
Considering the assembly conditions between limbs, according to equation (1),


where
Analysis of motion bifurcation
Parallel mechanisms with motion bifurcation characteristics are called motion bifurcation parallel mechanisms. In the continuous motion of the mechanism, the number of all the members does not change, and the structure of the mechanism does not change. Usually, two mutually vertical motion forms of the mechanism are realized by mutual constraints between the kinematic pairs of the motion itself, and the degrees of freedom during the motion are smaller than the degrees of freedom of the mechanism in the initial state. Because the motion bifurcation parallel mechanism is easier to control than other parallel mechanisms, and the stiffness can be maximized, this kind of mechanism can be used in special workplaces where strict two vertical working paths are required.
At present, significant progress has been made in the type synthesis and DOF analysis of parallel robots,40,43,44 but the vast majority of studies are still focused on parallel mechanisms with defined DOF. For parallel mechanisms with bifurcation characteristics of degrees of freedom, there is little systematic and in-depth research. In this paper, on the basis that the parallel mechanism has at least two rotation and one translation degrees of freedom, the coordination between them is required to achieve special grasping tasks (such as spherical rotation and grasping motion). Therefore, this paper proposed mechanism should be parallel mechanism with motion bifurcation properties. When a particular configuration is reached, the degrees of freedom in only one direction are available, while the degrees of freedom in other directions will be lost, and the stiffness of the mechanism will be maximized. This helps the mechanism to have higher shape adaptability when grasping tasks.
Workspace analysis
A 4-RRS& planar four-bar mechanism with motion bifurcation characteristics can be assembled by selecting limbs according to the assembly conditions. Figure 3 shows its structure diagram. The mechanism consists of static platform, moving platform and four symmetrical RRS limbs. Starting from the static platform, the RRS limb consists of a rotating hinge, a rotating hinge and a spherical hinge. Without loss of generality, let point
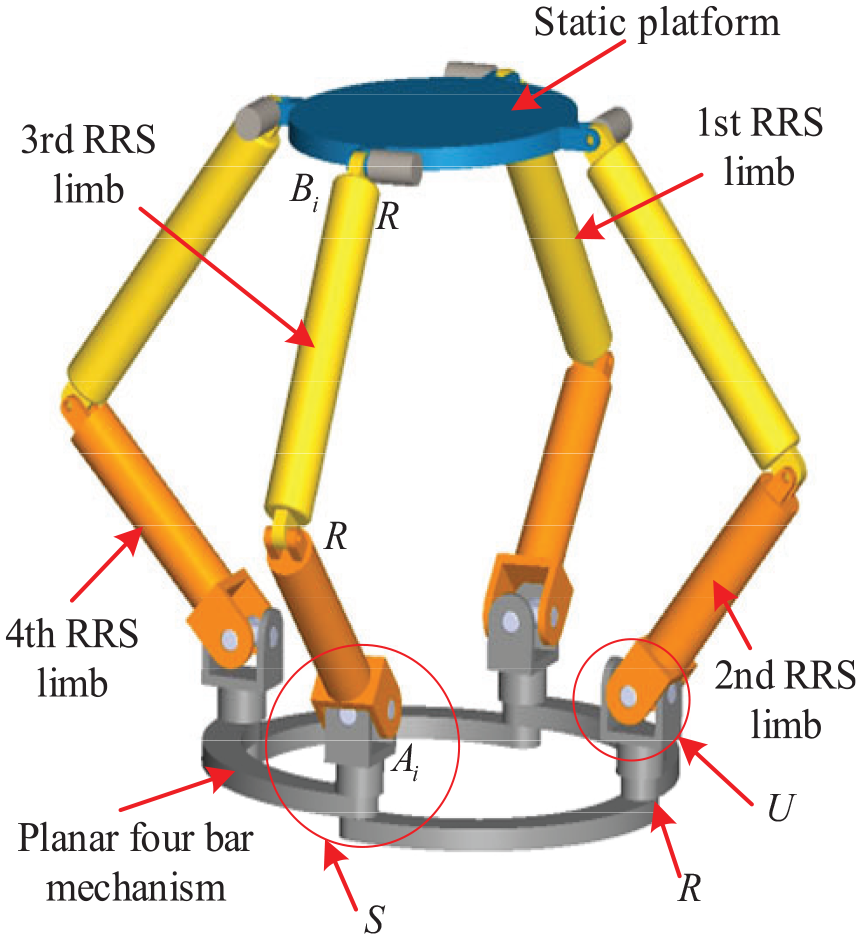
Schematic diagram of 4-RRS& planar four-bar mechanism.
Without loss of generality, since the structure of the four limbs of the parallel mechanism is exactly the same, the 3rd RRS limb is taken as an example to analyze the motion screws and constraint screws of the 4-RRS-planar four-bar mechanism, as shown in Figure 4. Where


Schematic diagram of the 3rd RRS limb analysis.
According to the reciprocal product principle, 45 the reciprocal screw of equation (6) can be obtained as follows:

The reciprocal screw represents the constraint force along the
Since the structure of the four limbs is the same, the reciprocal screw jointly constraints the translation along the

Special attitude diagram of 4-RRS& planar four-bar mechanism: (a) rotating about x axis, (b) rotating about y axis, and (c) rotating about z axis.
Kinematics analysis
In this section, the position and velocity analysis of 4-RRS& planar four-bar mechanism are carried out. The closed-loop vector method is used to establish the inverse solution model of mechanism position, and the finite instantaneous screw theory is used to establish the inverse solution model of mechanism velocity, to provide a certain theoretical basis for the subsequent kinematic simulation work.
Inverse position analysis
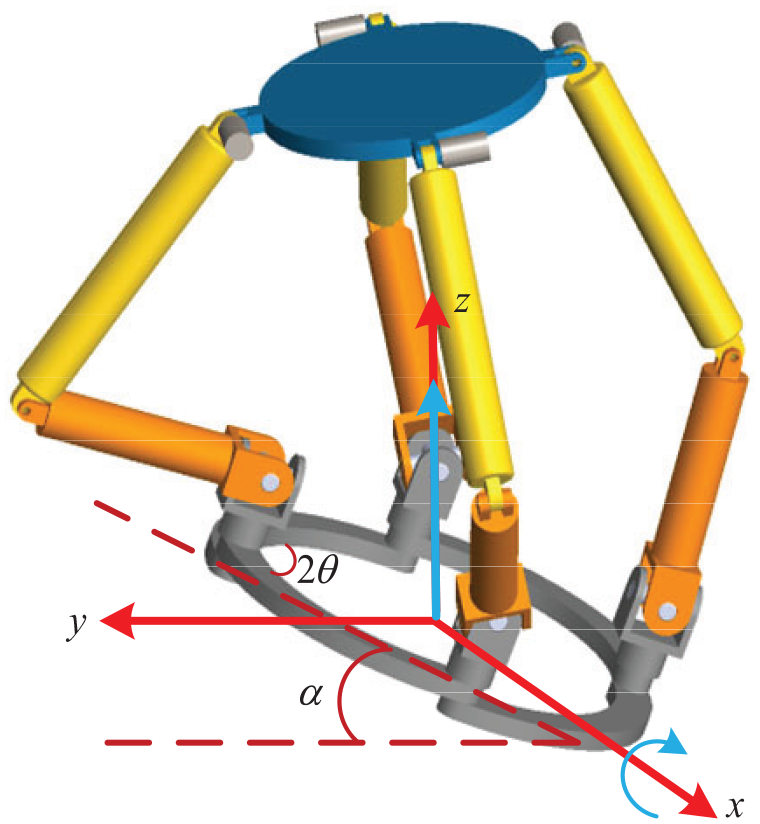
The core of inverse position analysis is to reveal the internal relationship between the actuation angle of the moving platform and the size of the static platform. As shown in Figure 6, the static platform coordinate system

Structure diagram of the 4-RRS& planar four-bar mechanism.
The angle between the unit normal vector

According to the homogeneous transformation coordinate method, it can be obtained that the rotating by intersection points



where
Based on the central symmetry, the closed-loop vector equation is established assuming rotation around the

where point
Assuming rotation of

The projection of the mechanism on the

Schematic diagram of projection in
By connecting



where three points
According to the law of cosines, the actuation angle is

Based on the central symmetry, the closed-loop vector equation is established assuming rotation around the

where point
Assuming rotation of

According to the law of cosines, the actuation angle is

Velocity analysis
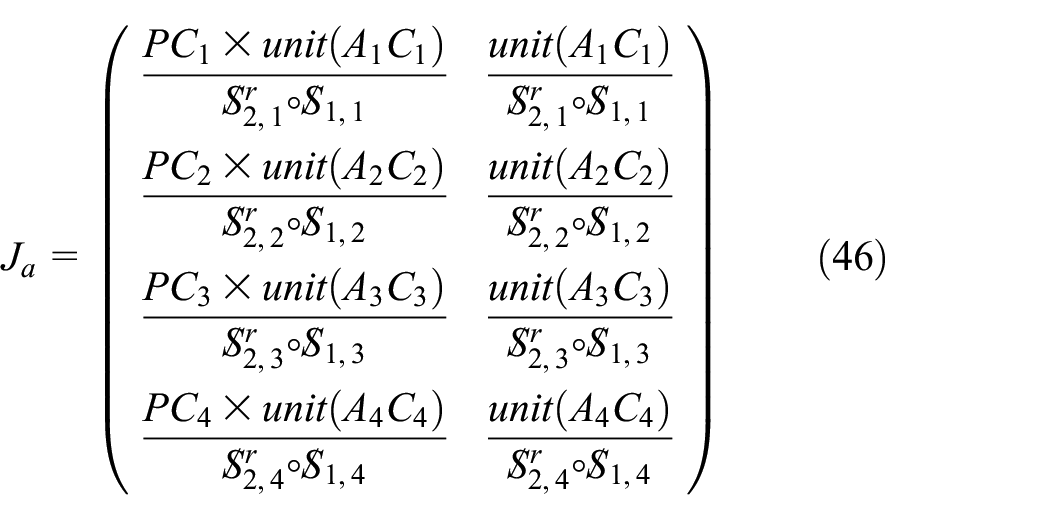
After addressing the displacement model of the mechanism in the previous sections, the velocity model is considered in this section, where the mappings between the joint parameters and the velocity of the moving platform are revealed. In this section, the motion mapping between the inputs and the outputs of the mechanism is considered, will be introduced to compute the Jacobian matrix between the actuation joint parameters and the output velocity. The instantaneous motion screw of the center

Based on position analysis, the moving platform can rotate
As shown in Figure 8, screws on the





Schematic diagram of actuation screw.
The screw of the motion (velocity) of the moving platform is expressed as

In state 1, when the moving platform rotates about the

where,
Since the 1st limb and the 3rd limb are symmetric, the 1st limb is taken as an example to solve the reciprocal screw of limb. The screw system of the 1st limb is

According to the reciprocal product principle, the reciprocal screw of limbs can be obtained as follows:

Similarly, taking the 2nd limb as an example to solve the reciprocal screw of the 2nd limb and the 4th limb, the screw system of the 2nd limb is
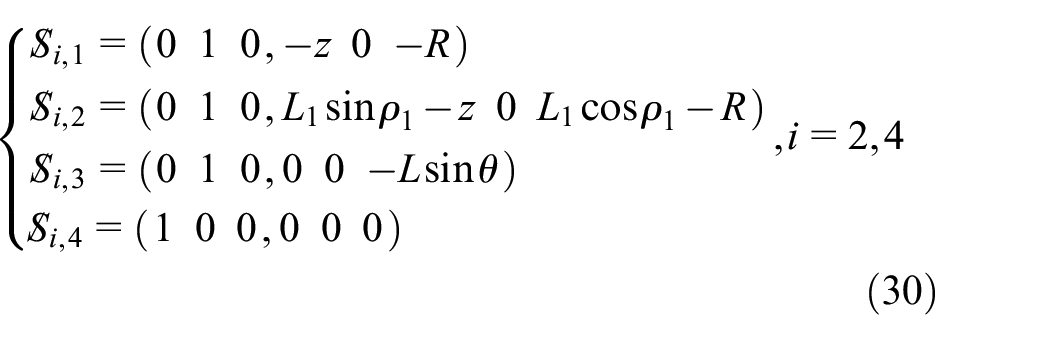
According to the reciprocal product principle, the reciprocal screw of limbs can be obtained as follows:

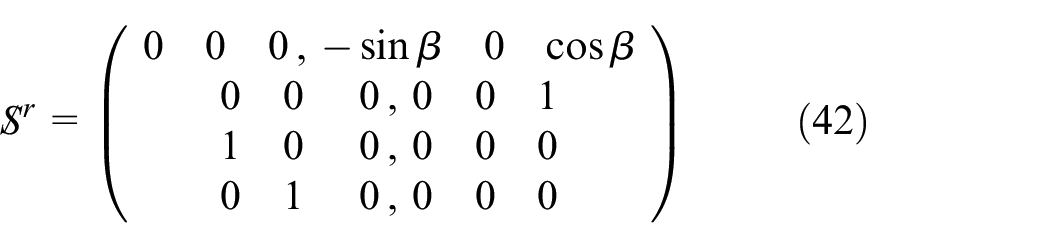
In summary, the reciprocal screw of this mechanism can be expressed as

Since the relation between the constrained Jacobian matrix

Then the constrained Jacobian matrix

According to the screw theory of coplanar two line and vector inversion, the actuation force screw
46

By the reciprocal product principle

where,



In state 2, when the moving platform rotates about the

where
Since the 1st limb and the 3rd limb are symmetric, the 1st limb is taken as an example to solve the reciprocal screw of limb. The screw system of the 1st limb is

The reciprocal screw of limb is obtained by reciprocal product of screw

Similarly, taking the 2nd limb as an example to solve the reciprocal screw of the 2nd limb and the 4th limb, the screw system of the 2nd limb is

According to the reciprocal product principle, the reciprocal screw of limbs can be obtained as follows:

In summary, the reciprocal screw of this mechanism can be expressed as
Since the relation between the constrained Jacobian matrix

Then the constrained Jacobian matrix

According to the screw theory of coplanar two line and vector inversion, the actuation force screw

By the reciprocal product principle
where



Numerical example and simulation
Figure 9 shows the state of the 4-RRS& planar four-bar mechanism when rotating around the
Moving platform rotation angle and moving distance.
Structural parameters of the mechanism.

The rotation angle

Matlab angular displacement–time curve.

SolidWorks angular displacement–time curve.
Then, the movement of the moving platform on the
Structural parameters of the mechanism.

The moving distance of the moving platform along the

Matlab displacement–time curve.

SolidWorks angular displacement–time curve.
Finally, the contraction motion of the moving platform itself is simulated and verified. The structural parameters of the mechanism are shown in Table 3.
Structural parameters of the mechanism.

The variable

Matlab displacement–time curve.

SolidWorks angular displacement–time curve.
By comparing and analyzing the images produced by the two software, it can be seen that the curves are all linear, that is, there is no singular point in the motion of the mechanism, so as to verify the correctness and rationality of the inverse kinematics solution of the mechanism.
Conclusion
Aiming at the characteristics of product diversity in machining and manufacturing, this paper takes parallel mechanism as the research object, and proposes a control mechanism with shape adaptability, 4-RRS& planar four-bar mechanism, based on the finite screw theory, to meet the task of grasping the shape diversity of industrial parts. The main conclusions are as follows:
1) The degrees of freedom of the mechanism were analyzed based on the screw theory. It can be seen that the mechanism not only has 2R1T, but also can carry out bifurcation motion to ensure the grasping of different objects.
2) The position of the mechanism is analyzed by the closed-loop vector method, and the analytical expression between the motor actuation angle and the moving platform is established.
3) The inverse velocity solution model was established by the instantaneous screw method, and the velocity Jacobian matrix of the mechanism was derived by the algebraic method.
4) With the help of SolidWorks and Matlab software, the kinematic simulation of the mechanism is carried out, and the simulation results are completely consistent with the theoretical derivation results, that is, the rationality of the mechanism motion and the correctness of the theoretical analysis are verified.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Tianjin University Science and Technology Development Fund Project (Grant No. 2020KJ105).
Data availability statement
Data are available from the authors on request.