
Abstract
The model predictive control (MPC) is widely used in permanent magnet synchronous motor (PMSM) motion systems because of its simple structure, easy implementation, and reasonable control effect to realize accurate speed tracking. However, MPC relies on the mathematical model of a PMSM. During motor operation, parameter drifts will occur and the model will be mismatched. Furthermore, motor operation may be affected by known and unknown disturbances, resulting in a degraded control performance. To solve this problem, ultra-local model-free speed prediction control (MFSPC), based on high-order sliding mode compensation (HOSMC), is proposed. Only the output and input of the speed loop are used to establish MFSPC and no system parameters are considered. HOSMC shows good control performance under nonlinearity and is not sensitive to parameter changes and external disturbances, which improves the robustness and anti-interference performance of the control system. Therefore, the current output is composed of two parts: an MFSPC output current and an HOSMC output current. The experimental results show that the method has strong robustness and anti-interference ability, and it can achieve a rapid dynamic response, track rated speed, reduce current and speed ripples, and suppress chattering.
Keywords
Introduction
Permanent magnet synchronous motors (PMSMs) have the advantages of simple structure, small size, low manufacturing cost, small rotational inertia, and high-power density. Thus, they are widely used in driving devices. However, PMSMs are complex systems with strong coupling, multiple variables, and nonlinearity. Therefore, a reasonable control method must be adopted to improve the motor control performance, satisfy actual requirements, and ensure smooth motor operation.1,2
Traditional PMSM control methods include vector control and direct torque control (DTC). The vector control technology, which is based on DC motor control methods, establishes decoupling equations to achieve the separation of straight- and cross-axes currents, and thus realizes the decoupling of magnetic field and torque so that AC motors have a similar control performance to DC motors. However, when PMSM is subject to parameter changes or external disturbances, the motor control performance decreases.3–5 In order to solve this problem, Xia et al. 6 combined SMC and proportional–integral (PI) control, effectively using the insensitivity to parameters and faster dynamic response performance of the SMC, and the stability performance of the PI control. The results show that, when a PMSM starts, the adjustment time and overshoot become smaller, and the reference speed can be tracked stably. Vafaie et al. 7 proposed a PI resonant control by modeling the non-ideal factors that cause periodic torque ripple. This method does not require precise parameters and compensation terms, can effectively reduce the periodic speed fluctuations of a PMSM. DTC abandons the decoupling idea of the traditional vector control technology, cancels the rotation coordinate conversion, weakens the system’s dependence on motor parameters, and directly outputs the required space voltage vector through the torque and flux regulator, for the direct control of torque and flux. However, the traditional DTC method has a large torque and flux ripple, unstable inverter switching, and high-frequency noise due to the torque ripple.8–10 Accordingly, Xia et al. 11 proposed a minimum harmonic distortion criterion for the PMSM current based on the required switching frequency, adjusted the hysteresis band to maintain the switching frequency constant, analyzed and calculated the optimal frequency band of the PMSM, and obtained the best control. Liu and Li 12 devised an analytical expression between the PMSM torque and flux change rate and the matrix converter and constructed an enhanced switching table, with a fixed switching frequency and without coordinate conversion. The results show that this method can effectively reduce torque ripple.
With the development of science and technology, people put forward higher control performance requirements for PMSM. Therefore, traditional control methods have certain limitations, and artificial intelligence control is more and more widely used in PMSM. In order to improve the stability and reliability of PMSM vector control, the maximum likelihood voting (MLV) algorithm was proposed in Dan et al. 13 Firstly, the extended Kalman filter is used to estimate the motor speed as the input of MLV algorithm. Then, the data fusion technology is used to process the speed information and improve the MLV algorithm to ensure the high performance of PMSM and improve the operation efficiency. To improve the speed and position estimation accuracy of PMSM, Wang and Zhang 14 used back-propagation BP neural network to optimize and adjust the gain parameters of the second-order sliding mode observer online. According to the requirements of control performance, parameters were adjusted in real time to suppress the output jitter of the system and improve the accuracy and stability of the estimation. In view of the model parameters and the actual system do not match, cause the model mismatch, reduce the control performance, Wang et al. 15 proposed predictive control based on fuzzy algorithm. When model mismatch occurs, the fuzzy algorithm can adjust the weight coefficient to make online compensation in real time, eliminate the static error and chattering of the motor, and achieve fast dynamic response.
Compared with conventional control methods, model predictive control (MPC) is widely concerned by scholars because of its simple structure and easy operation. MPC relies on the precise PMSM mathematical model to discretize to get the predicted value of the next moment. By optimizing the cost function, the predicted value follows the reference trajectory and tends to the expected value. During the operation of the motor, the motor parameters will change with the saturation of the magnetic circuit, temperature rise, which will cause the control performance to decrease. Several scholars have recently proposed solutions to solve the model mismatch caused by parameter changes and the impact of unknown disturbances on control performance. Errouissi et al. 16 simplified the PMSM mathematical model and used the forward Euler discrete method to perform multi-step prediction and set an optimized objective function so that the predicted speed value along the reference trajectory approached the expected speed. An expanded state observer (ESO) was established to perform feedforward compensation for disturbances in speed, external disturbances, and current tracking errors. Experimental results show that this method has certain advantages in terms of speed tracking and overshoot. Liu et al. 17 proposed a nonlinear predictive control scheme. To enhance its robustness to parameter uncertainties and external disturbances, a disturbance observer is designed and integrated into the controller. A disturbance observer is used to estimate the deviation caused by parameter uncertainty and load torque changes. Experimental results show that the method is effective in terms of speed trajectory tracking performance, robustness to parameter uncertainty, interference suppression and constraints. In Fliess and Join, 18 to obtain a better speed-current tracking effect, a terminal sliding mode speed-current single-loop control is designed to avoid the traditional complex cascade control structure. Owing to the mismatch disturbances such as the parameter drift of the motor, the terminal sliding film control cannot maintain the invariance. Therefore, a nonlinear disturbance observer is designed for feedforward compensation. Experimental results show that the method has a good dynamic effect and tracking performance and is superior in terms of robustness and anti-interference performance.
Several modern control methods are based on the mathematical model of the control object, and the model mismatch caused by parameter changes is unavoidable. Therefore, Michel Fliess in Zhou et al. 19 proposed a model-free control method, which has been successfully applied to various fields such as transportation and energy management. MFSPC only uses the input and output of the system, does not involve any system parameters, and combines the known and unknown interference terms of the system, which are collectively referred to as the total system disturbance. Thus, it avoids the degradation of control performance due to parameter drift and reduces the sensitivity of the control system to parameter changes and unknown disturbances. In Zhang et al., 20 only the system input and output are used without considering any system parameters to establish an ultra-local model-free control, to solve the model mismatch problems such as parameter drift, inverter nonlinearity, and cross-coupling voltage. The parameter identification method is used to estimate the total disturbance of the system, and feedforward compensation is performed; however, there is a certain fluctuation in the estimated value. Yang et al. 21 shows that there is a certain relationship between the model-free predictive current control performance and the sampling frequency. A low sampling frequency may cause a poor control performance. Therefore, an ultra-local model-free predictive current control based on ESO is proposed. The ESO is established to monitor the total disturbance of the system in real time, and frequency domain analysis is used to set the ESO parameters. Experimental results show that the method demonstrates a reasonable performance in terms of dynamic overshoot, tracking error, and output ripple. However, both matching and non-matching disturbances exist in the PMSM control system. The ESO estimation system has some limitations. 22 Chen et al. 23 proposed a model-free adaptive discrete-time integral terminal sliding mode control for PMSM drive system with disturbance observer. Aiming at the deterioration of control accuracy caused by the unknown aggregate interference in the control system, a non-linear disturbance observer filter is designed to estimate and further suppress the interference. The results show that the proposed method has strong robustness and anti-interference ability.
During the PMSM movement, phenomena such as unknown disturbances and parameter drifts are unavoidable. However, we cannot measure the actual values of these disturbances accurately and can only approximate them. Therefore, a high-precision observer is required to reduce the influence of uncertainties. The high-order sliding mode observer is considered an effective method to deal with uncertain systems. 24 Zhang et al. 25 used a new SMC and extended sliding mode disturbance compensation technology and could effectively adapt to system changes, track the speed, and reduce chatter, to improve the PMSM speed control performance under different disturbances. Feng et al. 26 proposed a terminal sliding mode observer to deal with the problem that the actual parameters are difficult to measure during PMSM operation. This observer can track the system state with high accuracy within a limited time, estimate the changing parameters, and improve the control performance of the motor. Delpoux and Floquet 27 proposed a new PMSM sensorless control method, which uses a robust SMC technology, does not require a position sensor, and ensures the position tracking of the motor.
Thus, this paper proposes an MFSPC method based on HOSMC to improve the robustness of PMSM speed to parameter changes and the anti-interference ability against known and unknown disturbances. First, only the input and output of the speed loop are used, and the system parameters are not considered. The principle of deadbeat control is used to obtain the current generated by the MFSPC method. Subsequently, an HOSMC is established to reduce the influence of parameter drift, external disturbances, and internal disturbances, and the current generated by the HOSMC method is obtained. Therefore, the reference current output by the speed loop is composed of the currents generated by the MFSPC and HOSMC methods. The experimental results show that the method has strong robustness and anti-interference ability, and it can achieve a fast-dynamic response, reduce speed and current ripples, and suppress chatter.
The rest of the paper is structured as follows. Section II describes the MFSPC and determines the current generated by the MFSPC method. In Section III, the HOSMC controller is established, the Lyapunov function stability analysis is performed, and the current generated by the HOSMC method is obtained. Section IV presents an analysis of the experimental results, and Section V summarizes the paper.
Ultra-local model-free PMSM speed prediction design
For the first-order system input and output, the traditional ultra-local model is expressed as 22

where y is the system output, u is the system input, F includes the known and unknown disturbance terms of the system, and α is the non-physical scale factor.
If the traditional P controller is used, the ultra-local model-free control is expressed as

Here, e = y – y*, y* represents the expected output of the system,
The mathematical model of a PMSM is expressed as
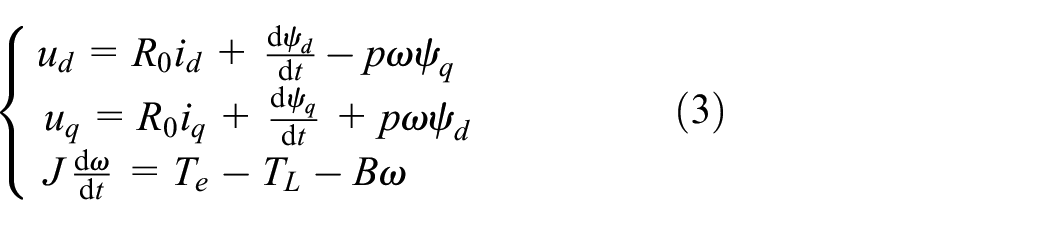

where ud and uq are the dq-axis voltages, respectively; id and iq are the dq-axis currents, respectively; ψd and ψq are the dq-axis flux linkages, respectively; Ld and Lq are the dq-axis inductances, respectively; R0 is the stator resistance; ψf0 is the permanent magnet flux linkage; J is the moment of inertia; p is the number of motor poles; B is the damping coefficient and ω is the mechanical angular velocity of the motor.
Substituting equation (4) into equation (3) yields the stator voltage equation

It can be observed from equation (5) that the PMSM mathematical model achieves complete decoupling. The electromagnetic torque equation can be written as

For a surface-mounted PMSM, Ld = Lq= L0. Thus, the equation of motion is

Considering the parameter drift and unknown disturbance generated during the operation of the motor, the equation of motion is rewritten as

Here, ΔJ, ΔB and Δψf respectively represent the change value of moment of inertia, damping coefficient and flux linkage, fω represents the unknown disturbance to the speed loop.
Figure 1 shows the mismatch of moment of inertia J, damping coefficient B and flux linkage ψf on the speed loop under the conditions of 1000 rpm and 10 N.m. It can be seen from Figure 1 that the three parameter mismatches all affect the stability of the speed loop, the mismatch of moment of inertia and damping coefficient has a greater impact on the speed loop, while the error caused by the flux linkage parameter mismatch is less.

Under the conditions of 1000 rpm and 10 N.m, the influence of the error caused by the mismatch parameters: (a) influence of the mismatch of moment of inertia and flux linkage and (b) influence of damping coefficient mismatch.
According to equation (8), and by denoting iq as the speed loop input and ω as the speed loop output, the ultra-local model-free structure of the speed loop can be established as

where iq1 is the input of the MFSPC controller, δ is the controller gain, and F is the total disturbance of the system, including the known and unknown disturbance terms of the system.
However, the actual value of the total disturbance term F of the system cannot be measured. The parameter identification method is used to estimate the total disturbance of the system.22,23

Here, T = nF·Ts, nF represents the sequence length and Ts represents the sampling time. The discrete-domain expression of the total disturbance estimate of the system is

Based on equation (9), the Euler discrete method is used to convert the continuous-time model to a discrete-time model as follows:

Then, the reference current is obtained as

To make the speed track the rated speed ω* better, the following equation is considered:

Finally, the reference current is obtained as

Design of HOSMC controller
The reference current output of the designed speed loop controller is composed of iq1, which is generated by the MFSPC method, and iq2, which is generated by the HOSMC method.

The speed error is defined as

The derivation of equation (17) yields

Here, F is the total disturbance of the system.
The sliding mode surface function is defined as 28

where ξ is the controller gain, and

The sliding mode surface function is differentiated to obtain

According to equation (21), the second derivative of the sliding mode surface function s(t) can be obtained as

Considering s(t) and

where σ is the switching gain, and α and β satisfy the two conditions,
The derivation of equation (23) yields

because 1 < α/β < 2, when
The approach rate function is selected as

Where, η1 is the controller gain.
Equating equation (24) and equation (25) yields

Simplifying equation (26) yields

where

Based on equation (22) and equation (27), the output current iq2 of the HOSMC method can be obtained as

satisfying
Using the Lyapunov function to verify the stability of the HOSMC controller, the function V is defined as

Differentiating the equation yields

As
The Control diagram of the PMSM drive system with MFSPC + HOSMC method is shown in Figure 2.

Control diagram of the PMSM drive system with MFSPC + HOSMC method.
Analysis of experimental results
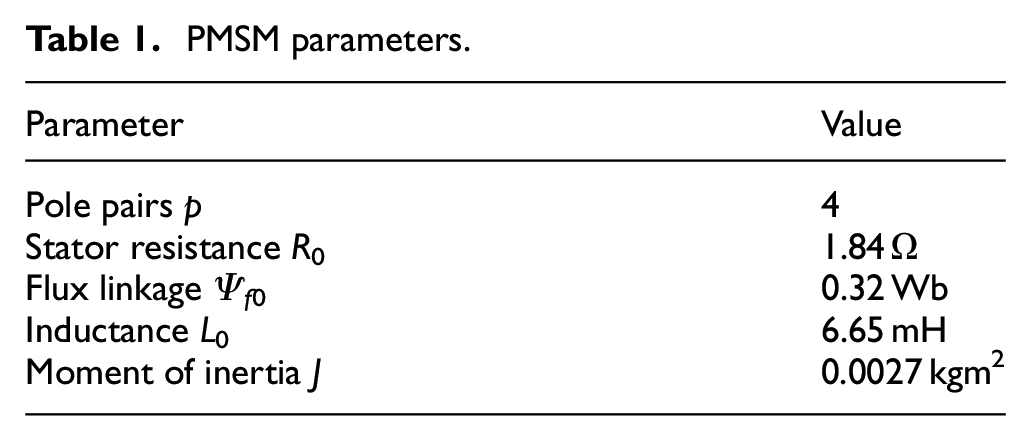
This section carries out the analysis of the experimental results. The experimental configuration of the PMSM drive control system is shown in Figure 3, and the experimental platform is shown in Figure 4. The experimental platform is based on MATLAB/Simulink to design the algorithm model of the servo control system, and can automatically generate code, download it to the target machine through RT-Sim software, and run it, which is convenient for the research and verification of PMSM control method. PMSM parameters are shown in Table 1. The Controller parameters are designed as follows: δ = 1000, ξ = 0.05, α/β = 1.4, σ = 0.01, and η = 1, nF = 10.

The experimental configuration of the PMSM drive control system.
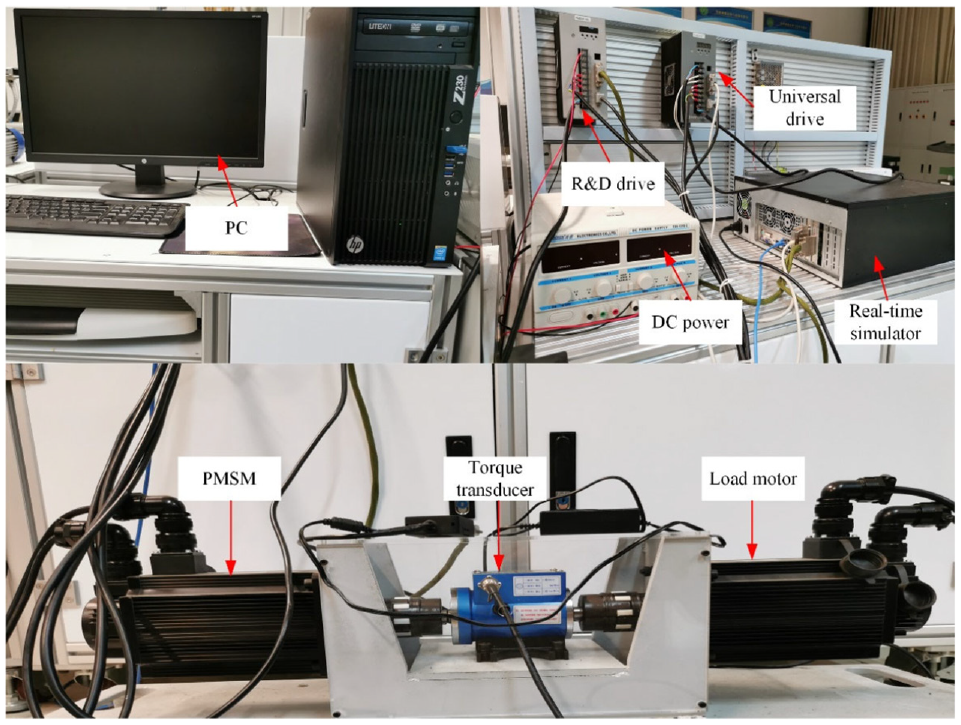
The experimental platform of the PMSM drive control system.
PMSM parameters.
The three methods, namely, conventional SMC, MFSPC, and MFSPC + HOSMC, are compared to evaluate the control performance of the method proposed in this paper.
Speed reversal performance
To verify the method proposed in this paper, the PMSM’s speed changes from forward to reverse.
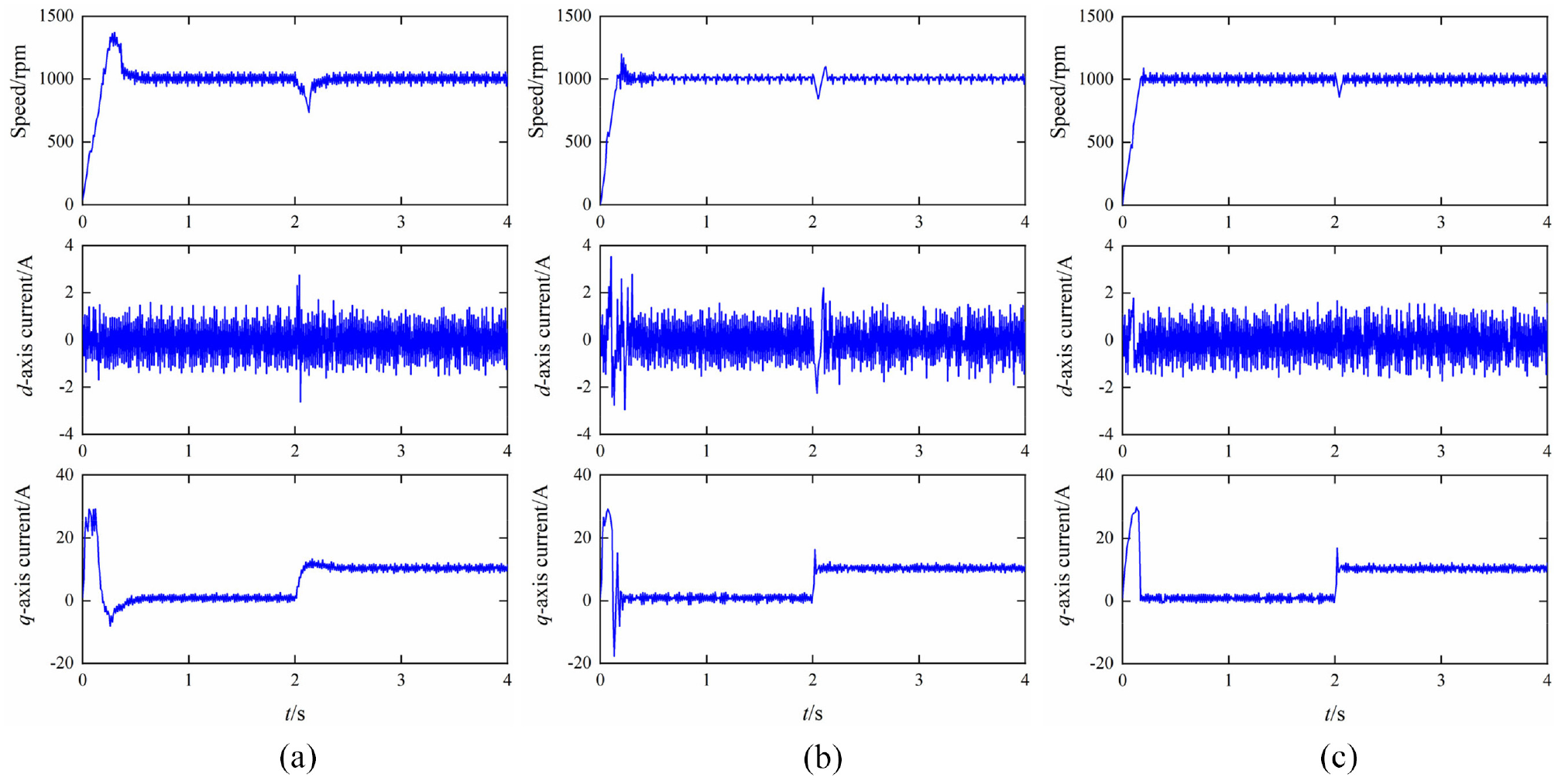
Figure 5 shows the speed and d−q axis current response of the three methods during the forward to reverse rotation of the PMSM. In terms of speed response, the conventional SMC method has a large overshoot in the motor starting phase. When the motor reverses, the overshoot is larger and the dynamic response speed is slower; When the motor starts and reverses, The MFSPC method produces large overshoot, there is large pulsation and the operation is not stable; The MFSPC + HOSMC method proposed in this paper has a stable motor start and high tracking accuracy, the overshoot is only 9.047%. When the PMSM reverses, it can quickly recover to the given speed and has a faster dynamic response characteristic. In terms of the d−q axis current response, the d-axis current abrupt change in the conventional SMC method is more obvious, and the q-axis current produces a large overshoot during the reverse recovery phase; The MSFPC method produces a larger current ripple, and the q-axis current chattering phenomenon is more obvious; the MFSPC + HOSMC method, the d−q axis current runs more smoothly.

Motor response waveforms under speed reversal performance: (a) conventional SMC, (b) MFSPC, and (c) MFSPC + HOSMC.
Load disturbance performance
Under the condition of adding load disturbance TL = 10 N.m at t = 2 s, verify the motor control performance. Figure 6 shows the PMSM’s speed and current response waveforms. In terms of speed response, the conventional SMC method has a large overshoot in the starting phase. When it is disturbed by external load, the speed decreases obviously and it takes a long time to recover to the given speed; The MFSPC method and MFSPC + HOSMC method have strong anti-interference ability. When it is disturbed by external load, the speed fluctuation is small and can quickly track the given speed, but the tracking accuracy of the MFSPC method is low. In terms of d−q axis current response, the conventional SMC method and MFSPC + HOSMC method do not produce large current ripples, and the current response is relatively stable; The MFSPC method current chattering phenomenon is more obvious, and the fluctuation is large, which is not conducive to the smooth operation of the motor.
Motor response waveforms under load disturbance performance: (a) conventional SMC, (b) MFSPC, and (c) MFSPC + HOSMC.
Parameter disturbance performance
Figure 7 shows the PMSM’s speed and current response waveforms under the condition of parameter change disturbance. Among them, the parameter changes flux linkage ψf = ψf0→0.8ψf0, damping coefficient B = B0→2B0, moment of inertia J = J0→2J0, and the load TL = 10 N.m. In terms of speed response, the conventional SMC method has a large overshoot in the speed, which cannot quickly track the rated speed and has poor dynamic response characteristics; The MFSPC method and the MFSPC + HOSMC method run relatively smoothly and have strong anti-interference ability, but the tracking performance of the MFSPC method is poor. In terms of d−q axis current response, the current operation of the conventional SMC and MFSPC method is not stable, and there is a large current fluctuation; In the MFSPC + HOSMC method, when the parameter changes are disturbed, the d-axis current fluctuates, but it can recover quickly, the q-axis current overshoot is small, and no large current ripples are generated. This method is less affected by disturbance and has strong robustness and anti-interference ability.

Motor response waveforms under parameter disturbance performance: (a) conventional SMC, (b) MFSPC, and (c) MFSPC + HOSMC.
Table 2 shows the comparison of the speed response of the conventional SMC method, the MFSPC method and the MFSPC + HOSMC method under the three conditions of A, B, and C. It can be seen from Table 2 that in the conventional SMC method, there is a large overshoot during the motor startup stage. When the motor reverses, the speed down becomes larger. When subjected to load disturbance and parameter change disturbance, the speed response is greatly affected, and the speed drop is more obvious. In the MFSPC method, during the motor startup phase, although there is no large overshoot, the speed response chattering is obvious. When disturbed by load and parameter changes, it has certain anti-interference ability, but the tracking accuracy is low. The MFSPC + HOSMC method proposed in this paper has strong parameter robustness and anti-interference ability. In the motor starting phase, there is a small overshoot. When disturbed by load and parameter changes, the speed response is less affected. It can quickly track a given speed, has faster dynamic response characteristics, and has higher tracking accuracy.
The comparison of the speed response under the three conditions of A, B, and C.

Conclusion
This paper proposed an ultra-local model-free speed prediction control based on high-order sliding mode compensation (MFSPC + HOSMC) to obtain a good speed tracking effect, solve the problem of model mismatch caused by the change in the motor parameters, and reduce the degradation of control performance caused by the known and unknown disturbances of the motor. The results showed that, under speed reversal conditions, it has a stable motor start and quickly track reverse speed. Under load disturbance conditions, it can achieve fast dynamic response, effectively reduced the speed and current ripples, and suppressed chattering. Under parameter disturbance conditions, the method showed strong robustness and anti-interference performance, obtained a good tracking effect.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Natural Science Foundation of China (No.71601180).
Data availability
The data used to support the findings of this study are included within the paper.