
Abstract
This paper proposes a new type of robust fault detection and isolation filter for dynamics of HST based on descriptor systems with uncertainties in finite frequency. This filter is designed based on the unknown input filter to decouple the non-linear variables due to the aerodynamic drag pressing on the trains. The exogenous disturbance is partitioned into two parts-the decoupling one is regarded as the augmented variables of the non-linear part of the systems, and the non-decoupling one is seen as the augmented disturbance along with the uncertainties. Concurrent faults of different positions are considered, residual evaluation functions and adaptive threshold are given to judge if the faults occur. Fault isolation is implemented by a set of detection subspaces associated with every different fault which is assigned to its own detection subspace. The residual is not only sensitive to the fault, but also has a robustness against the non-decoupling disturbance and uncertainties in finite frequency. Simulation examples are given to demonstrate the effectiveness of this method.
Introduction
Safety technology related to railway operation is urgently required with the rapid growth of high-speed railway mileage. In addition to technical factors such as human operation, the hidden dangers of system equipment failure and incomplete safety monitoring mechanisms are the main factors impacting on the safe operation of high-speed trains (HSTs). It is well known that the fault diagnosis technique is a key technology to improve system safety, reliability, and maintainability. Therefore, combined with advanced fault diagnosis technology such as fault tolerant control and fault detection, it is of far-reaching practical significance to improve the safety performance of HST operation.
Due to the requirements of railway transportation safety, the incipient faults of the train must be detected in time to avoid disastrous consequences and economic losses. In view of this, plenty of fault detection methods have been investigated for HST systems in recent years. Among these, research has been investigated for detecting the component faults of the traction devices such as inverter, 1 rectifier, 2 and traction motor. Aiming at the fault diagnosis of the brake cylinder subsystem of the EMU, a fault detection and fault isolation strategy based on variable variance has been proposed and verified by experiments. 3 In addition, some other fault detection results have been reported for suspension systems, 4 pantograph, 5 and navigation systems 6 of HST. However, these methods only focus on the structure devices, which ignore the complicated exogenous disturbance of HST.
Considering the trains as a whole, single particle model has been proposed for describing the dynamics of the HST 7 ; Treating each car of the trains as a rigid point, considering the mutual force between car interconnected, the multi-particle model is proposed further. 8 Based on these models, adaptive algorithm and learning methods have been proposed to deal with the fault diagnosis of dynamics of HST.9–11 In the above literature, the research on HST’s fault diagnosis is more realistic by considering the changes in speed and position of the trains and the influence of the exogenous disturbance. However, these methods pay attention to speed and position tracking control under multiple faults with known boundary value rather than fault detection. To implement fault detection for dynamics of HST based on multi-particle, some prominent methods have been proposed to detect the actuator fault 12 and sensor fault13,14 under the premise that the distribution matrix of the fault is known. Nevertheless, there are still some problems unsolved in these studies. One is that fault detection methods in these studies only focus on the actuator or sensor fault occurring separately but not simultaneously. The other is that these studies ignore exogenous disturbance existing in measurement. Specific to the fault detection of HST, the measurement disturbance or noise has a great influence on the detection index and is difficult to process by state space model, which calls for a system model with better descriptive characteristics.
Regarding the measurement disturbance or noise as an auxiliary variable, the dynamics of the HST are seen as a descriptor system. Descriptor system, which is also named as the singular system, has received widespread attention as it has a better description than the state space one, and has widely used for describing a large class of actual systems such as attitude control systems of satellites (ACSs),
15
DC motor model,
16
vehicle,
17
and power network.
18
Many significant results have been reported for fault detection of descriptor systems in the time domain.19–22 Among these, the
Based on these reasons, this paper proposed a new fault detection and isolation (FDI) method for the dynamics of HST based on non-linear descriptor systems in finite frequency considering the system uncertainties and the wind gust. The proposed method is to design a nonlinear decoupled filter to achieve the decoupling of nonlinear state variables, partially decoupling disturbances, and faults. Superior to the former studies, the proposed method not only considers the actuator fault, plant fault and sensor fault, simultaneously, but also avoids the linearization of the non-linear variables that implementing more accurate fault detection results. Moreover, by designing detection subspaces, the filter has a better sensitiveness to the fault compared with the conventional
The descriptor system is introduced for the fault diagnosis of the dynamics of HST innovatively. The wind gust and the system uncertainties are considered simultaneously. The established model is closer to the real train model, and the fault detection for HST based on non-linear descriptor system with uncertainties extends the fault diagnosis theory for descriptor systems in finite frequency domain.
A decoupling filter avoiding the linearization of the non-linear systems is proposed. The decoupled disturbance and the non-linear variables of the dynamics of the HST are decoupled together which makes the filtering of non-linear systems be much easier.
Different kinds of faults are considered simultaneously, and an adaptive threshold is proposed. Not only the concurrent faults are detected rapidly, but also the miss alarm rate and the false alarm rate are decreased effectively comparing with fixed threshold. At the same time, effective fault isolation is implemented by the designed detection subspaces.
The remainder of this paper is organized as follows. In section 2, the measurement noise and the mass of HST are seen as the variables and the uncertainties of the dynamics of HST, respectively. Then an uncertain descriptor system for the dynamics of HST is established. In section 3, a new detection filter is proposed to decouple the non-linear part of the descriptor systems, detection subspaces is presented to guarantee the sensitiveness of the filer to the fault. By this way, filer design is formulated as the LMI feasible problem, then. Further, residual evaluation function and adaptive threshold are introduced to judge if the faults occur. Section 4 gives simulation example considering that the actuator fault, sensor fault and plant fault occur simultaneously, and miss alarm rate and false alarm rate are analyzed to show the effectiveness of the proposed adaptive threshold for comparing with a fixed threshold. Moreover, simulations are given to show the effectiveness of the designed filter on fault isolation. A brief conclusion is drawn at the end.
Notation: For a matrix
Uncertain descriptor system of HST
Dynamics of HST
In this section, the dynamics of HST is analyzed. To simplify the force analysis of HST, each car of the trains is seen as a rigid point, and the force between each car caused by the coupler is reduced as a spring model. Basically speaking, the train is affected by basic running resistance and additional resistance during operation. The former includes the rolling mechanical resistance, aerodynamic, and the latter includes bounded disturbance caused by curve resistance, slope resistance, tunnel resistance, etc. The resistance has non-ignorable influence on HST running. Thus, taking them into account, the force diagram of HST is shown in Figure 1.

Force diagram of HST.
Where:

Where:
Due to the Kinetic characteristics of HST, aerodynamic drag is only considered for the first car, as aerodynamic drag mainly acts on the first car. 24 Moreover, rolling resistance is impacted on each car. Then the aerodynamic drag and rolling resistance are formulated by Davis formula given as follows:


Where:
Commonly, there are two ways for system modeling of dynamics of HST. On the one hand, the aerodynamic drag and rolling resistance are seen as the disturbance of the train together with the curve resistance, slope resistance, and the tunnel resistance. 25 On the other hand, some others saw the aerodynamics and rolling resistance as the state variables of the train,24,26,27 which is also adopted in this study.
Define the additional resistance as

Where:
Define

Where:


Fault model
In order to consider the faults occurring in different positions of HST comprehensively for the proposed method, three types of common faults, namely, actuator fault, coupler fault, and sensor fault, are considered and modeled in this section.
Actuator fault usually occurs in the input of actuator, and its mathematical model can be expressed as:

Where:
Coupler fault occurs on the coupler between adjacent cars due to the changes of the spring constant k, and its mathematical model can be expressed as:

Where:
Sensor fault occurs in speed or position sensor and can be modeled as the additional term of the measurement variables in HST. Its mathematical model in measurement equation can be expressed as

Where:
Descriptor system modeling
In actual working conditions, wind gust is also an important external force affecting HST. Thus, the disturbance

Where:
For a convenient discussion, the sensor fault is temporary ignored here in descriptor system modeling. Define

Where:
So far, a descriptor model is established for dynamics of HST by seeing the noise as an auxiliary variable, and the filter design for fault detection of HST is formulated as the fault detection filter design for the descriptor system (10).
Robust fault detection filter design
The main aims of this paper are to design a fault detection filter for HST based on uncertain descriptor system (10). The proposed filter can not only guarantee the residual which is sensitive to the fault signals, but also is robust to the system disturbance if the following aims are satisfied.
Aim 1. Define

Aim 2. Residual signals
Fault detection filter
Lemma 1 is given to attenuate the influence of disturbance


Where:
Based on Lemma 1, a fault detection filter is proposed with a decoupled structure as:

Where:
Define the state estimation error
Where:
Then the gain matrices

Moreover, Lemma 2 is given to calculate matrices

and the matrix

Where:
Assumption 1 is proposed for calculating

Where:

such that
Composite fault isolation
In this section, detection subspaces related to the distribution matrices of the faults are given, and each of the fault is allocated to its corresponding subspace to implement the fault isolation.


Define

Where:

from (20) and assumption 2, it is obvious that:

Define:


then the complementary subspace

From (22), it is easy to verify that
Given matrices

and

Where:

The eigenvalues of

Define

from (27), the vector

Then, the gain matrix

Where:

Where:
Finite frequency
performance
To effectively describe the signal performance in different frequencies, the frequency domain is partitioned into the low, middle, and high frequency domain, respectively. Totally speaking, the finite frequency domain can be expressed as
When
In this paper, FDI is studied in longitude dynamics of HST. As the human body is more sensitive to the horizontal vibrations of 1–2 Hz, 28 and this frequency range belongs to the high frequency obviously. Thus the exogenous disturbance is assumed to belong to high frequency, which makes the study more practical.
The main purpose of this section is to find symmetric matrix

hold for asymptotically stable
Values


then, their exists a scalar

where
To analyze the

Where:
Theorem 1 is proposed to guarantee that the performance (31) is satisfied for an asymptotic stable signal


Where:


The proof theorem 1 is given in Appendix.

Where:
Where:
Based on the aforementioned process, the designing steps of the fault detection filter are summarized in algorithm 1.

then the optimized
Figure 2 is given to show the design flow of the proposed method.

Flow of FDI for dynamics of HST based on descriptor systems.
To detection the fault promptly and more accurately, an adaptive threshold is designed for comparing with the fixed threshold to show the effectiveness the proposed method.
Firstly, the

Where:
As there exists noise in disturbance, residual is a non-stationary stochastic process, and is approximated to a Gaussian distribution. Thus, adaptive threshold is relative to the mean value

The confidence interval for the mean with a confidence level of

Where:

Moreover, the detection logical is given as:


where
From equation (46) it is seen that, although
Simulation
Simulation parameters
In this section, a six-car HST model 24 is given to illustrate the effectiveness of the proposed method. In this paper, parameters of the model are given in Table 2.
Parameters of HST.

Moreover, the damping constant

Where:


Assuming that the disturbance


In this paper, three types of fault are considered. The actuator fault is assumed to be the motor power loss of the third car, the coupler fault is assumed to be the coupler failure between the fifth and sixth car, and the sensor fault is assumed to be the speed sensor drift of the first car. According to their actual working conditions, the fault signals are given as:

and their distribution matrices are given as:

By equation (38), the sensor fault is formulated as the pseudo-actuator fault with the distribution matrices:

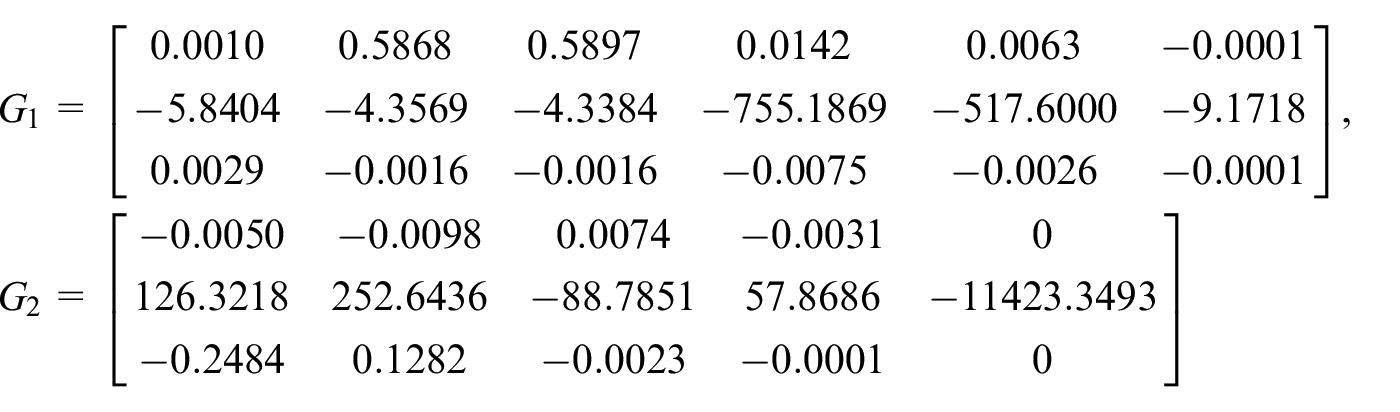
Then, matrices

By solving LMI (35) and LMI (36),
Simulation results and analysis of fault detection
To illustrate the effectiveness of proposed filter and the adaptive threshold for fault detection, two fault detection cases are considered. Moreover, for a convenient discussion, the residual evaluation function of the actuator fault, coupler fault and sensor fault occurrence dimensions are defined as

Fault detection results for concurrent faults: (a) fault detection result for actuator fault (b) fault detection result for coupler fault and (c) fault detection result for sensor fault.
Alarm delay times of the fault detection in case 1.

From Figure 3 it is seen that, when the actuator fault, coupler fault and sensor fault occur at the same time (
From the above analysis, it is known that the designed filter and the proposed adaptive threshold implements prompt fault estimation even the faults occur simultaneously.
Firstly, the disturbance in equation (47) is assumed to increase to 1.5 times, and the amplitude of the coupler fault is assumed to be decreased by 30% considering that the fixed threshold may lead to miss alarm for the fault with a smaller amplitude. By equation (47), the fixed threshold is calculated as

Miss alarm of the adaptive threshold and the fixed threshold.
Considering the actual working conditions of the train, the coupler connects the two adjacent cars, even short-time fault may cause trains to decouple. Thus, the acceptable detected delay is limited to 0.5 s in this paper. From Figure 4 it is seen that, for coupler fault, using the fixed threshold, the fault is detected as about
In addition, it is seen that for the single coupler fault, even under a higher level of disturbance, the fault detection is quicker comparing with the simultaneous ones. Comparing with the detection result in case 1, the detected time for coupler fault is decreased by 44.72%. The simulation result further verifies the effectiveness of the proposed adaptive threshold.
Then the false alarm results are given to show the effectiveness of the proposed adaptive threshold. As shown in remark 7, the fixed threshold is mainly relative to the disturbance level. Thus, in this section, the disturbance is assumed to abruptly increase by 1.5 times at
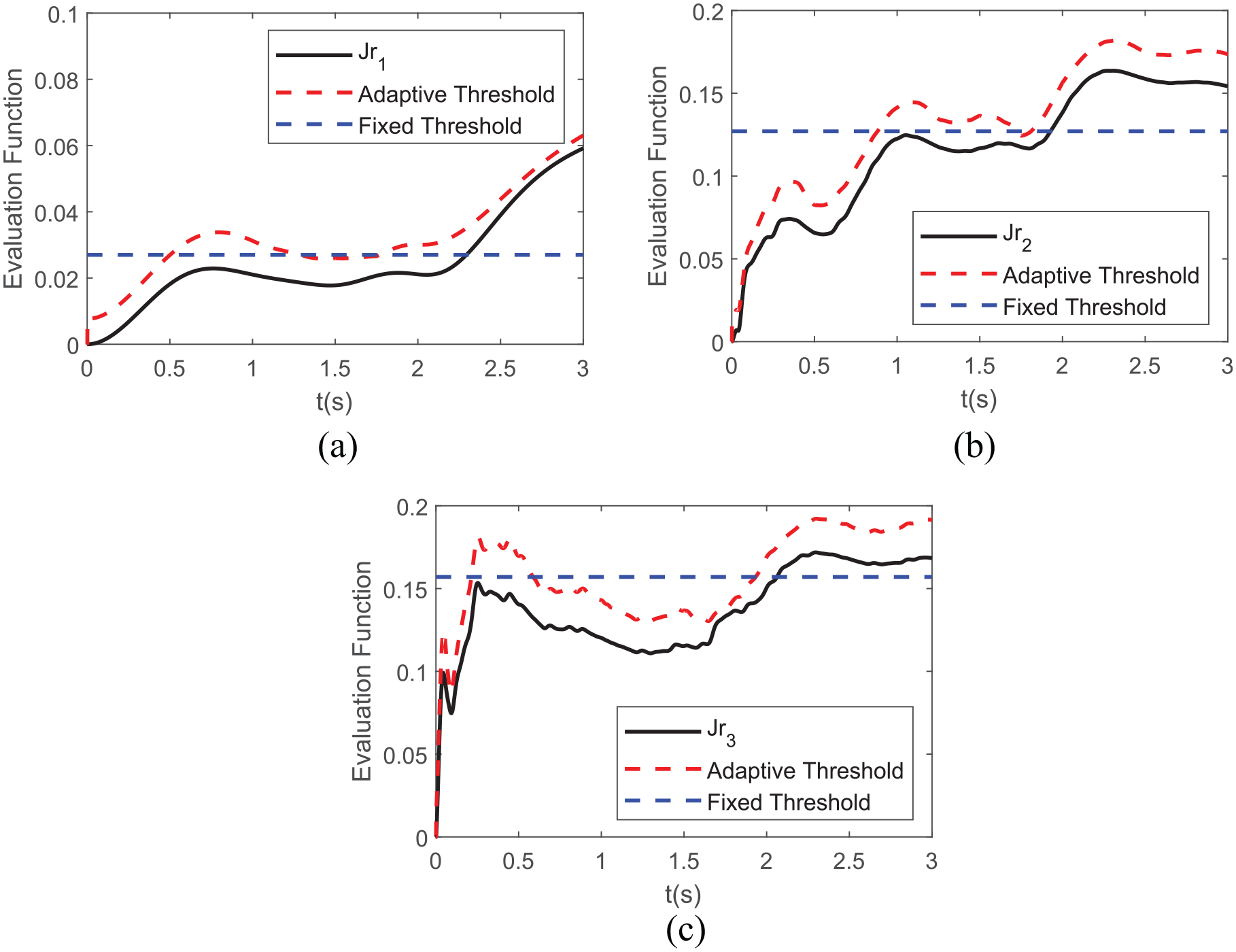
False alarm when disturbance abruptly changes: (a) false alarm for actuator fault (b) false alarm for coupler fault, and (c) false alarm for sensor fault.
False alarm times for three types of single fault in case 2.
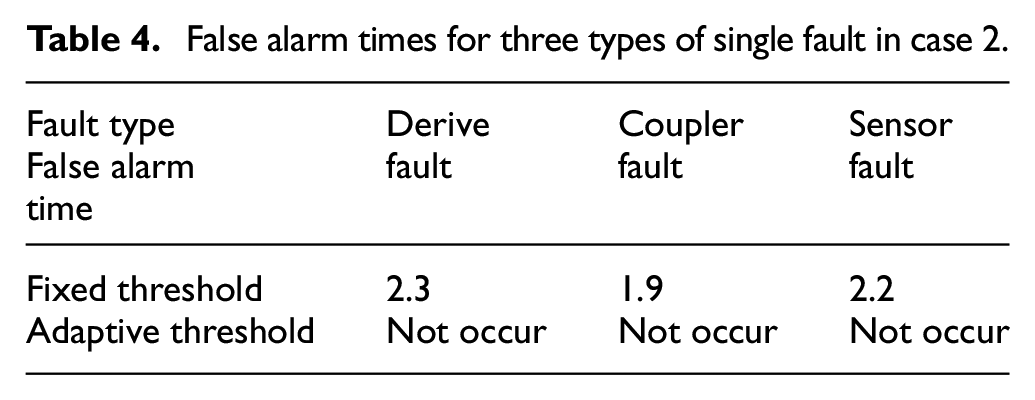
From Figure 4 and Table 5 it is seen that, although the faults don’t occur, as the disturbance abruptly increases, the residual evaluation functions for three types of fault increase correspondingly, then the false alarms happen for each single fault. For single actuator fault, the false alarm happens at about
Alarm delay times of the single fault detection.

By the above analysis, as the adaptive threshold tracks the residual evaluation function synchronously, the threshold of each single fault adjusts adaptively, the miss alarm rate and false alarm rate are both decreased effectively comparing with the fixed threshold, which means that the designed filer and the proposed adaptive threshold implements more accurate fault detection.
Simulation results and analysis of fault isolation
To show the effectiveness of the proposed filter for fault isolation, simulation results for residual evaluation functions
Firstly, assume that only actuator fault occurs, and the simulation results are given in Figure 6.

Fault isolation result for actuator fault: (a) residual evaluation function
From Figure 6 it is seen that, the residual evaluation functions
Then, the coupler fault isolation and sensor fault isolation results are given in Figures 7 and 8, respectively.

Fault isolation result for coupler fault: (a) residual evaluation function

Fault isolation result for sensor fault: (a) residual evaluation function
Similar fault isolation results are obtained by analyzing Figures 7 and 8. From Figures 7 and 8 it is known that, single coupler fault and single sensor fault are effectively isolated respectively. Figure 7 shows that, for single coupler fault, residual evaluation function
Moreover, alarm delay times of the single fault detection is given in Table 5.
Comparing with the alarm delay times of the concurrent faults which are shown in Table 3, the alarm delay time of the single actuator fault is decreased by 23.81%, and that of the coupler fault and sensor fault are decreased by 32.86% and 25.93%, respectively, which is consistent with the simulation results for single coupler fault detection of miss alarm simulation scenario. The simulation results in this section further verify that the proposed filter and the adaptive threshold not only implement rapid fault detection, but also implement effective fault isolation at the same time.
Simulation summary
Based on the results and analysis in FDI, for three types of fault, it is easy to know that the proposed decoupled filter not only implements single fault detection rapidly, but also implements concurrent faults detection promptly. At the same time, the proposed adaptive threshold decreases the miss alarm rate for faults with smaller amplitude even in a higher level of disturbance, and greatly decreases false alarm rate when disturbance increases abruptly. Comparing with the fixed threshold, the proposed adaptive threshold implements fault detection more accurately. Moreover, the residual evaluation function of the fault occurrence dimension of the proposed filer is sensitive to its own adaptive threshold, but has no influence on the other residual evaluation function, which means that the designed subspaces of the filter implement fault isolation for faults effectively. Simulation results and analysis show that, the proposed FDI method is effective for dynamics of HST with uncertainties, wind gust, exogenous disturbance and measurement noise by a descriptor system approach.
Moreover, it should be noticed that this descriptor approach is not only suitable for dynamics of HST, but also for other vehicles with concurrent faults and measurement disturbance/noise. In spite of this, there is still room for improvement in this method. For example, in actual working conditions, there may exist time-varying delays for state variables of the train due to severe working conditions. This delay may have an influence on simulation results. This provides some ideas for the study in the future.
Conclusion
In this paper, FDI problem in finite frequency for dynamics of HST is studied. The mathematical model for the dynamics of HST is established based on non-linear descriptor systems considering the system uncertainties, wind gust, exogenous disturbance as well as measurement noise. FDI filter is proposed which is sensitive to the concurrent faults and has a robustness against the exogenous disturbance and uncertainties. To decouple the nonlinear variable and attenuate the disturbance from residual signals, the nonlinear variable and part of disturbance are seen as the decoupled variable, and the rest of disturbance is attenuated by
The proposed method not only has broad application prospects in fast FDI of high-speed trains, but also improves the fault diagnosis theory for descriptor systems. Moreover, this method can be extended to FDI for uncertain dynamics of HST based on descriptor systems with time-varying delay in the future.
Footnotes
Appendix
Where:
from (35), it is easy to verify that
By Schur complement and lemma 3, (36) is equivalent to
where:
Define
Let:
Where:
from lemma 4, (A5) is equivalent to the following equation:
from lemma 5, under zero-initial condition, it is obvious that:
from (A7), the following inequality is satisfied:
The proof is completed.
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is supported by the Department of Education of Liaoning Province under Grants JDL2020020 and Changzhou Applied Basic Research Program under Grants CJ2020007.
Data availability statement
All data, models, and code generated or used during the study appear in the submitted article.