
Abstract
This article proposes an adaptive control scheme with a neural network compensator for controlling a micro-electro-mechanical system gyroscope with disturbance and model errors. The adaptive neural network compensator is used to compensate the nonlinearities in the system based on its universal approximation and improve tracking performance of the gyroscope. The neural compensator, which is trained online, is combined with adaptive control of the Lyapunov framework system to approach the unknown system disturbance and model errors. The system stability is deduced by the Lyapunov stability theory, and the simulation of the micro-electro-mechanical system gyroscope is carried out on Matlab/Simulink, verifying the superior performance of the neural control compensation method.
Introduction
Micro-electro-mechanical system (MEMS) gyroscope is one of the basic measuring elements, which is called an angular velocity meter. However, there are always small manufacturing errors in the manufacturing process of the microgyroscope, which will lead to the asymmetry of the structure, transposition of the left and right drive, and the shift of the mass center. The above influences tend to produce unnecessary interlaced coupling and create inherent system disturbances in the form of mechanical and electrostatic forces, reducing the performance of the microgyroscope. In addition, the microgyroscope is extremely sensitive to environmental changes, including ambient temperature and pressure.
In recent years, some researchers have proposed many advanced adaptive control methods to control MEMS gyroscopes. Some advanced sliding mode control methods were discussed in previous studies1–7 to improve the control accuracy of the gyroscopes. Hu and Gallacher 8 presented a high-precision mode tuning method for the MEMS gyroscope. In Montoya-Cháirez et al., 9 an adaptive control scheme was used to control a gyroscope of two degrees of freedom. In Wu et al., 10 a MEMS gyroscope design was proposed based on a model predictive control method. In Yang et al., 11 a mode-matching control scheme with feedback calibration is proposed for gyroscopes.
In nonlinear systems, there are often unknown nonlinearities. Recently, many researchers are working on neural networks, which do not need the precise models and could approach the nonlinear function with arbitrary precision. In Fei and Yang, 12 a neural compensation method was presented for a gyroscope. In Xiao and Chen, 13 a general projection neural network was applied to solve quadratic programming problem. Hua et al. 14 and Yin et al. 15 proposed an adaptive neural network control method for switched systems. Fang et al. 16 proposed a recurrent cerebellar model articulation neural network controller. In previous studies,17,18 an adaptive neural network dynamic surface control method was studied for nonlinear systems. In Dong et al., 19 a fuzzy neural network control method was presented for the unmanned marine vehicle. In previous studies,20–30 researchers combined neural networks and fuzzy systems with sliding mode control methods for controlling nonlinear systems. In Roh et al., 31 a new design method for fuzzy radial basis function (RBF) neural network classifier was investigated and developed.
In the manufacture and use of gyroscopes, there are often model errors and external disturbances. We need to avoid these external factors, which will affect control performance. Motivated by the above studies and research, an adaptive control method combining with an RBF neural network compensator is proposed to control the gyroscope system. The contributions of the proposed controller are listed as follows:
This article combines the adaptive control and the nonlinear approximation of neural network compensator. The RBF neural network is a three-layer forward network. The input-to-output mapping is nonlinear and can approximate any continuous function with arbitrary precision. In this article, neural network approximator is used to approximate system disturbance and model errors, improving the robustness of MEMS gyroscope with model uncertainties and external disturbance.
The article applies adaptive control to the gyroscope system; weights can be adjusted in real time, increasing the system accuracy, robustness, and adaptability of the gyroscope system; and the estimation of the unknown system is updated in real time.
The article compares the compensation effects of RBF neural network and back propagation (BP) neural network for model error and external disturbance. It can be seen that the RBF neural network has better approximation effect. In addition, compared with the common nominal controller, the proposed RBF neural network compensator has smaller tracking error and higher tracking accuracy.
Based on the Lyapunov stability theory, the proposed adaptive scheme can ensure the stability of the gyroscope closed-loop system. Two different kinds of external disturbances are considered in the simulation, and the results show good position-tracking performance, proving the superiority of the proposed neural compensation scheme.
Dynamics of MEMS gyroscope
Figure 1 shows a mass-spring-damping system diagram of a MEMS microgyroscope. The motion equation of microgyroscope is evolved from the Lagrange-Maxwell equation 12

where

Schematic model of a z-axis MEMS vibratory gyroscope.
We assume that the angular velocity remains constant for a long time, namely,

where

where
Rewriting equation (3) into the following vector form obtains

where
Nominal control design and problem formulation
The ideal oscillation trajectory of a MEMS gyroscope is defined as follows

Rewriting the ideal trajectory into a vector form, yields

where
We assume that the gyroscope modeling is precise and the external disturbance is nonexistent, namely,

Substituting the control law (7) into equation (4), we get the closed-loop system equation as

where
The equation (8) can be written as a state-space form

where
The following is the proof for stability of the nominal controller
Proof
Define the following Lyapunov candidate function as

where
The derivative of

Since
However, in fact, we cannot easily get the accurate gyroscope model, and the external disturbance cannot be ignored. We define the nominal values of

Substituting the control law (12) into equation (4) gets

Defining

From the equations (8) and (11), the tracking performance of the nominal controller based on the nominal model is greatly reduced for the actual MEMS gyroscope, although the system can remain stable. The target is to design a compensation controller to enhance the tracking precision and also ensure the system stable under model errors and external disturbances.
Define the modeling error as follows

Then, we design the control law as

An ideal closed-loop system in equation (8) is obtained by substituting equation (13) into equation (4). However, the modeling error
Rewriting the equation (8) as a state space form obtains

where
Because
Remark 1. It is true that estimation techniques can only provide estimation with some inaccuracy practically. Actually, we already consider time-varying unknown but bounded parameter uncertainties in the MEMS gyroscope model as equation (4). Note that, the lumped disturbances
Adaptive neural compensation scheme
Introduction of neural network
Figure 2 is a block diagram of a three-layer RBF neural network structure, which mainly includes an input layer, hidden layer, and output layer. The hidden layer maps the signal from the input space to a higher dimensional space, and the output layer performs a weighted summation operation to generate an RBF network output value.

Structure of RBF neural network.
The RBF neural network model is described by mathematical symbols as follows


where
Remark 2. In order to achieve a predetermined mapping relationship, there should be more hidden layer nodes for a single hidden layer network to increase the tunable parameters of the network; however, too much nodes will increase the complexity of the network structure. According to the experienced formula
Design of neural network compensator
In addition to the global approximation properties, the RBF neural network has the optimal approximation performance, namely, the RBF network can approach any nonlinear function over a compact set with arbitrary precision. The block diagram of adaptive neural compensation system is designed in Figure 3. We make the following assumptions for our study:
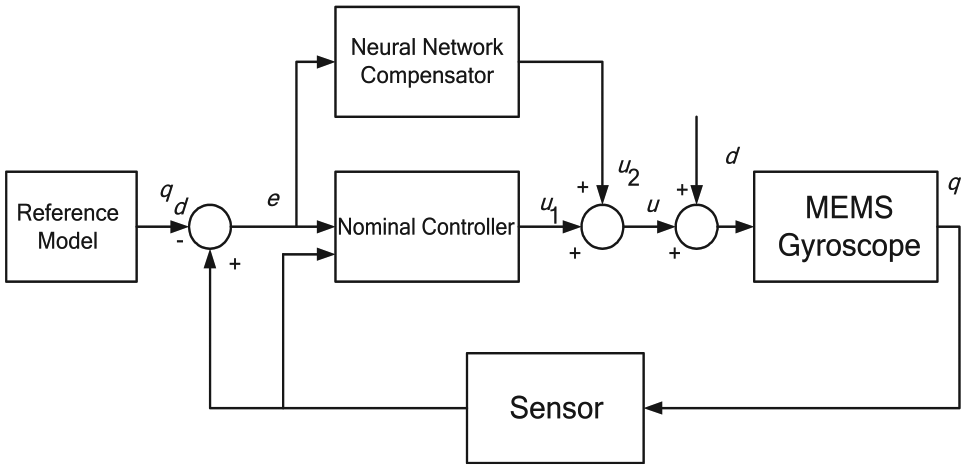
Block diagram of adaptive neural compensation system.
Defining

where
Based on the above assumptions, rewrite the equation (14) as

where
We assume

And

Then, the equation (18) can be expressed as

According to the characters of the RBF network, the function

where
Then, the equation (18) becomes

Then, we design a new neural compensator based on the proposed neural network for the MEMS gyroscope to eliminate the influence of uncertainty and external disturbance. Design the new control law as

where


where
Then, the closed-loop system equation becomes

where
Analysis of system stability
Select the following Lyapunov function

where

with
Because
Differentiating

Considering that

then, we can get

Set the adaptive law as

Substituting (36) into (35) yields

Due to

where
Simulation study
We verify the proposed neural network adaptive control method on the MEMS gyroscope model. The parameters of the microgyroscope are set as follows

We set

We define
Figures 4 and 5 are tracking error plots for two noises under the ordinary controller with

Tracking errors under
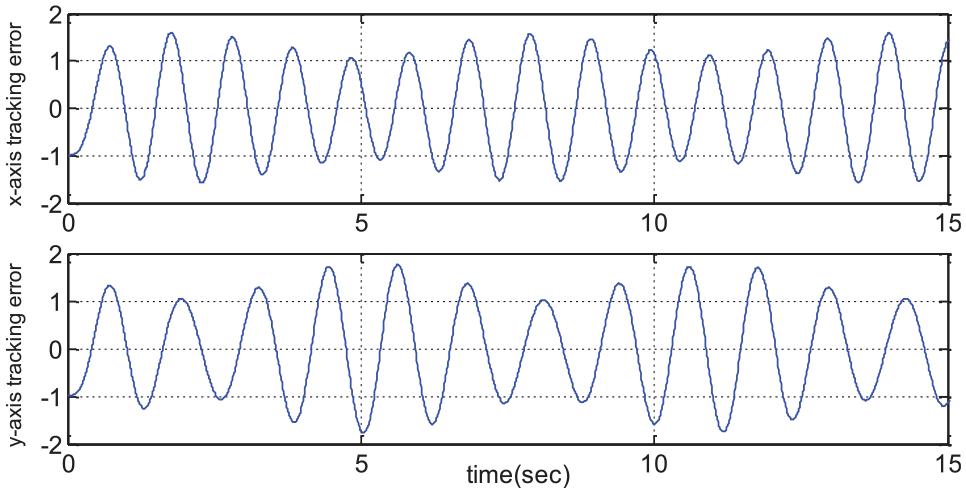
Tracking errors under
As is shown in the Figures 4 and 5 that the ordinary computed force control method can maintain the system stable, however, the tracking error is large owing to the modeling error and external disturbance. Note that the tracking errors displayed in the Figure 5 are nondimensional, namely, no units present. Their value characterizes their relative measurement respect to the reference length
The following are the parameters of the RBF neural network:

The center in each dimension is selected from −1 to 1 with the step
The simulation results of the neural network compensator under

Position tracking of

Position tracking of

Tracking errors under

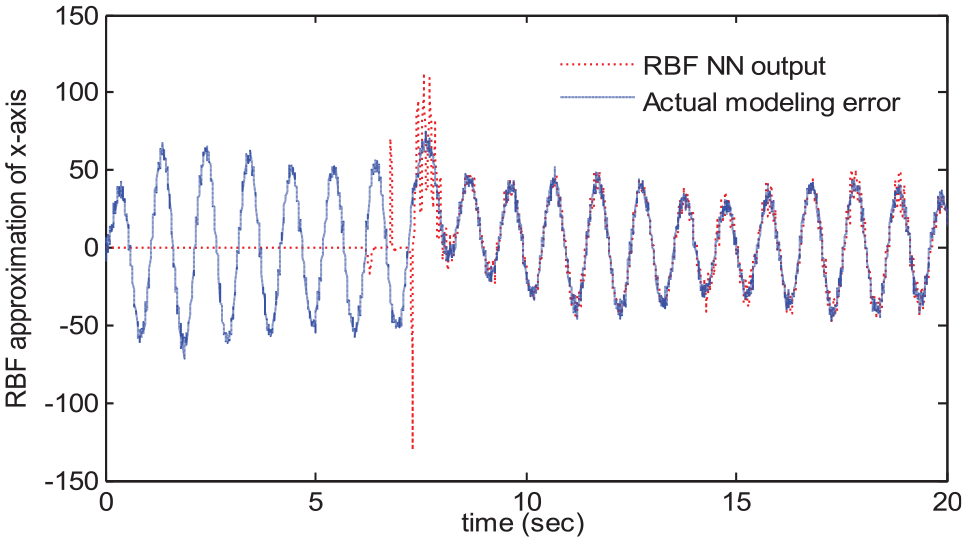
RBF network approximation of

RBF network approximation of
The simulation results of the neural network compensator under white noise disturbance

Position tracking of

Position tracking of

Tracking errors under
RBF network approximation of

RBF network approximation of
As is shown in the above figures, the modeling error
To demonstrate the effectiveness of the proposed RBF neural network compensator, we conduct a comparative study between RBF neural network compensator and BP neural network compensator.
32
The simulation results of the BP neural network compensator under

Tracking errors under
Conclusion
In this article, an adaptive control method based on the RBF neural network is proposed for MEMS gyroscope. An adaptive RBF neural network compensator, which is trained online, is used to approximate the model uncertainties and external disturbances. The control law and adaptive law are derived based on the Lyapunov theory, ensuring the stability of the MEMS gyroscope system. The ordinary controller method and the proposed neural network controller are applied to the microgyroscope system under two different interferences, respectively. The simulation results show that the proposed control scheme has a smaller control error, the better tracking performance, and strong robustness.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Science Foundation of China under Grant No. 61873085 and Natural Science Foundation of Jiangsu Province under Grant No. BK20171198.