
Abstract
Knitted spacer fabrics can be an alternative material to typical rubber sponges and polyurethane foams for the protection of the human body from vibration exposure, such as automotive seat cushions and anti-vibration gloves. To provide a theoretical basis for the understanding of the nonlinear vibration behavior of the mass-spacer fabric system under harmonic excitation, experimental, analytical and numerical methods are used. Different from a linear mass-spring-damper vibration model, this study builds a phenomenological model with the asymmetric elastic force and the fractional derivative damping force to describe the periodic solution of the mass-spacer fabric system under harmonic excitation. Mathematical expression of the harmonic amplitude versus frequency response curve (FRC) is obtained using the harmonic balance method (HBM) to solve the equation of motion of the system. Parameter values in the model are estimated by performing curve fit between the modeled FRC and the experimental data of acceleration transmissibility. Theoretical analysis concerning the influence of varying excitation level on the FRCs is carried out, showing that nonlinear softening resonance turns into nonlinear hardening resonance with the increase of excitation level, due to the quadratic stiffness term and the cubic stiffness term in the model, respectively. The quadratic stiffness term also results in biased vibration response and causes an even order harmonic distortion. Besides, the increase of excitation level also results in elevated peak transmissibility at resonance.
Introduction
The human body is sensitive to vibrations of various frequency ranges. For example, internal human organs and the nervous system are negatively affected by the frequency ranges from 4 to 8 Hz, and from 20 Hz to below 250 Hz, respectively. 1 However, occupations dealing with electrical and pneumatic powered rotary tools and processes in farming, mining, quarrying, demolition, and road construction inevitably produce dangerous vibrations in specific frequency ranges. 2 Prolonged exposure to vibrational environments may cause discomfort and even mechanical injuries and other diseases to workers in these professions. For example, workers operating hand-held power tools may develop hand arm vibration syndrome (HAVS) such as vibration-induced white finger (VWF) and peripheral neurological disorders. 2
To minimize the risks of vibration injury, vibration dampening materials can be used to attenuate the magnitude of vibration. However, traditional materials such as rubber sponges and polyurethane foams may have problems in comfort to wear and recycling. As a potential substitute, knitted spacer fabric is breathable, reusable, versatile and has good compression property. Especially for weft-knitted spacer fabric, it exhibits good conformability due to the loop nature of weft-knitted stitches. In practical applications, the cushioning performance of knitted spacer fabric as functional seat cushions or anti-vibration gloves is tool or excitation spectrum specific, because different vibrating machines induce different frequency spectrum and intensity of the vibration. 3 It is also common knowledge that in a linear mass-spring-damper vibration system, a low stiffness results in a broadened range of excitation frequencies in which the vibration can be isolated. Besides, a high damping is beneficial when vibration at resonance is a concern. Nevertheless, reducing the stiffness of the cushioning material may become disadvantageous when the excitation frequencies are very low; similarly, increasing damping may also be disadvantageous when the excitation frequencies are much higher than the resonance frequency. As a result, to minimize adverse vibrations and slow down the onset of vibration induced diseases, fabric design should match the specific application scenario. 4
Knitted spacer fabrics are sandwiched textiles which usually consist of two outer layers connected but kept apart by a spacer layer. They have been made into compression bandage,5,6 wound dressing7–9 and impact protector10–12 due to their particular mechanical and thermophysiological properties. For these uses, the compression behavior plays a very important role. To date, the compression behavior of knitted spacer fabrics has been extensively studied using experimental, numerical and analytical approaches.13–23 As a type of three-dimensional textile structure made of polymeric materials, knitted spacer fabric exhibits nonlinear compression force. Liu and Hu 16 experimentally identified that the compression force versus displacement relationship of knitted spacer fabric could be divided into the initial stage, the linearly elastic stage, the plateau stage and the densification stage. They 19 also developed a finite element model to strengthen the understanding of the compression mechanism of spacer fabric structure, finding that the nonlinear compression behavior is due to the post-buckling, torsion, shear, rotation, contacts between spacer monofilament, and contacts between spacer monofilament and outer layers. Parametric study also showed that smaller monofilament inclination, coarser monofilament and smaller fabric thickness result in higher compression resistance. Liu and Hu 17 also proposed a constitutive model consisting of seven parameters to describe the compressive stress-strain relationship of knitted spacer fabric. The proposed model outperforms three existing constitutive models by having the smallest fitting errors.
The quasi-static compression behavior is closely related with the pressure relief 24 and the impact protection10,25 performance of knitted spacer fabric as a cushioning material. Relevant research has already shown its energy absorption capacity from the perspectives of quasi-static compression and impulsive loading. Studies on the vibration properties and vibration dampening performance of knitted spacer fabrics have also been carried out in recently years. Blaga et al.26–29 studied the impact response of knitted spacer fabrics by employing the free vibration method. It was found that knitted spacer fabric should have both the capacity of absorbing vibration energy and sufficient stiffness to avoid its collapse. 28 Frydrysiak and Pawliczak 1 made a comparative study on the vibro-insulation properties of knitted spacer fabric and typical upholstery materials as vibration damping inserts in workplace seating, and concluded that knitted spacer fabrics can be a viable alternative to typical sponges, with the unquestionable advantage of having much lower thickness. Krumm et al. 30 compared the vertical seat transmissibility of warp knitted spacer fabrics and standard foam cushion, and found that the design of the seat backrest cushion should prefer warp knitted spacer fabrics, while the design of the seat pan cushion should prefer foams. Liu and Hu 31 experimentally investigated the vibration isolation properties of warp-knitted spacer fabrics under harmonic excitation, and found that thicker fabric possessed lower resonant and isolation frequencies, and thus showed better vibration isolation performance. Chen et al.32,33 studied the vibration transmission property of warp-knitted spacer fabrics under harmonic excitation and under damped free vibration conditions, respectively, based on a linear mass-spring-damper model. They found that the structural and material properties of warp-knitted spacer fabrics have significant effects on vibration transmission properties. However, taking knitted spacer fabric with top-loaded mass as a linear vibration system may be inadequate. Chen et al. 2 has experimentally studied the vibration isolation performance of weft-knitted spacer fabrics under harmonic excitation, and found that the curve shape in the transmissibility curve is asymmetric which bends to left at resonance, indicating the mass-spacer fabric vibration system is nonlinear. The study also showed that changing the load mass and the vibration intensity changes the loading conditions of the fabric structure, and thus also changes fabric stiffness and vibration isolation performance.
Based on the current research background, this study seeks to find a mathematical model to describe the vibration behavior of knitted spacer fabric under harmonic excitation. As a linear model only applies to very small vibration, it is necessary to take nonlinearities into account in building the equation of motion when the vibration is large. Nevertheless, if adopting the complex nonlinear elastic force-displacement relationships suitable for describing the quasi-static compression behavior of polymeric materials, such as the abovementioned Liu’s seven-parameter model 17 and the LS model, 34 which divides the typical compression stress-strain response of polymer foam into three regions, the vibration model will be difficult to arrive at an analytical solution. To circumvent this issue, force nonlinearity in the vibration model can be expressed in the form of a cubic polynomial consisting of linear-quadratic-cubic stiffness terms, instead of complex nonlinear force expressions. The quadratic stiffness term indicates force asymmetry.
Moreover, due to the viscoelasticity of polymer materials, a fractional derivative term is adopted in the vibration model to describe the time-dependent property of spacer fabric. The fractional-order derivative was raised by Leibniz more than 300 years ago. 35 Its nonlocal property indicates that the history states of a system have an influence on its current state. Moreover, it has a fading memory in that it weighs the recent past more heavily than the distant past.36,37 This property of having an unlimited and decaying memory makes fractional differential equations applicable to a description of complicated dynamical systems in the real world.38,39 Fractional calculus has become a popular instrument in many scientific and engineering fields such as viscoelasticity, hereditary physics, structural hysteresis, rheology, electrochemistry, bioengineering, mechanics, automatic control, signal and image processing, quantum evolution of complex system, etc.35,40 Bagley and Torvik 41 has used fractional derivate models to describe the frequency-dependent damping behavior of materials and systems very well. Deng et al. 36 and Deng 42 have also demonstrated the fractional derivative model is applicable in describing the viscoelasticity of flexible polyurethane foam during vibration.
Experimental
Fabric sample preparation
Weft-knitted spacer fabric was fabricated on a 14-gauge STOLL CMS 822 computerized flat knitting machine. Front and back needle systems produced two separate outer-layer pieces, which were knitted with single jersey structure using one 100D nylon multifilament yarn and one 30D Spandex/70D nylon covering yarn together. Simultaneously, polyester monofilaments with 0.12 mm diameter made tuck stitches every six-needle distance on two needle systems in turn. In this way, spacer monofilaments connected two outer-layer fabrics, and thus a sandwiched structure was obtained. After steaming treatment, fabric thickness was increased as the shrinkage of elastic outer layers caused the rotation of spacer monofilaments. Fabric samples were further relaxed under an environmental condition of 20°C and 65% relative humidity for 5 h. The diagram of fabric structure and structural characteristics of fabric including surface loop density, areal mass and fabric thickness are listed in Table 1. It is worth noting that only half numbers of needles participated in making the tucking texture, in which the tuck stitches were evenly distributed over the whole outer layers. Assuming using all needles to knit tuck stitches, the amounts of monofilaments consumed will be doubled, limiting the shrinkage of outer layers during the steaming treatment. Besides, monofilaments inside the spacer will become compacted and collapsed rather than standing up, resulting in much lower fabric thickness and less supporting capacity. Therefore, the structure with all needles knitting tuck stitches was not preferred.
Properties of the fabric sample.

Standard deviations are given in parentheses.
The cross-sections of the fabric along the course direction and the wale direction are shown in Figure 1(a) and (b), respectively. Spacer monofilaments have a cross-over structure along the course direction, and a curved shape along the wale direction. As shown in Figure 1(b), as the linking points A and B of each monofilament on two outer layers are not aligned vertically, relative slip between two outer layers can happen along the wale direction when a vibration force or a compression force is applied. To avoid the transverse instability, two identical spacer fabrics were bonded together using a double-sided adhesive tape as shown in Figure 1(c). In this way, the topmost layer and the base layer of the laminated fabric can maintain right opposite to each other when bearing load. Figure 1(d) shows the quasi-static compression curve of the laminated spacer fabric. Clearly, force nonlinearity takes place, as is also indicated by the stiffness curve.

(a) The course cross section, (b) the wale cross section of the weft-knitted spacer fabric, (c) the schematic of two identical fabrics laminated together, and (d) the quasi-static compression curve of the laminated fabric.
Vibration test
An electromagnetic vibration shaker equipped with a 350 mm × 350 mm platform was used to measure the acceleration transmissibility T of the laminated weft-knitted spacer fabric. The acceleration transmissibility T is defined as the ratio of the absolute value of the acceleration of the mass to the absolute value of the acceleration of the base platform.
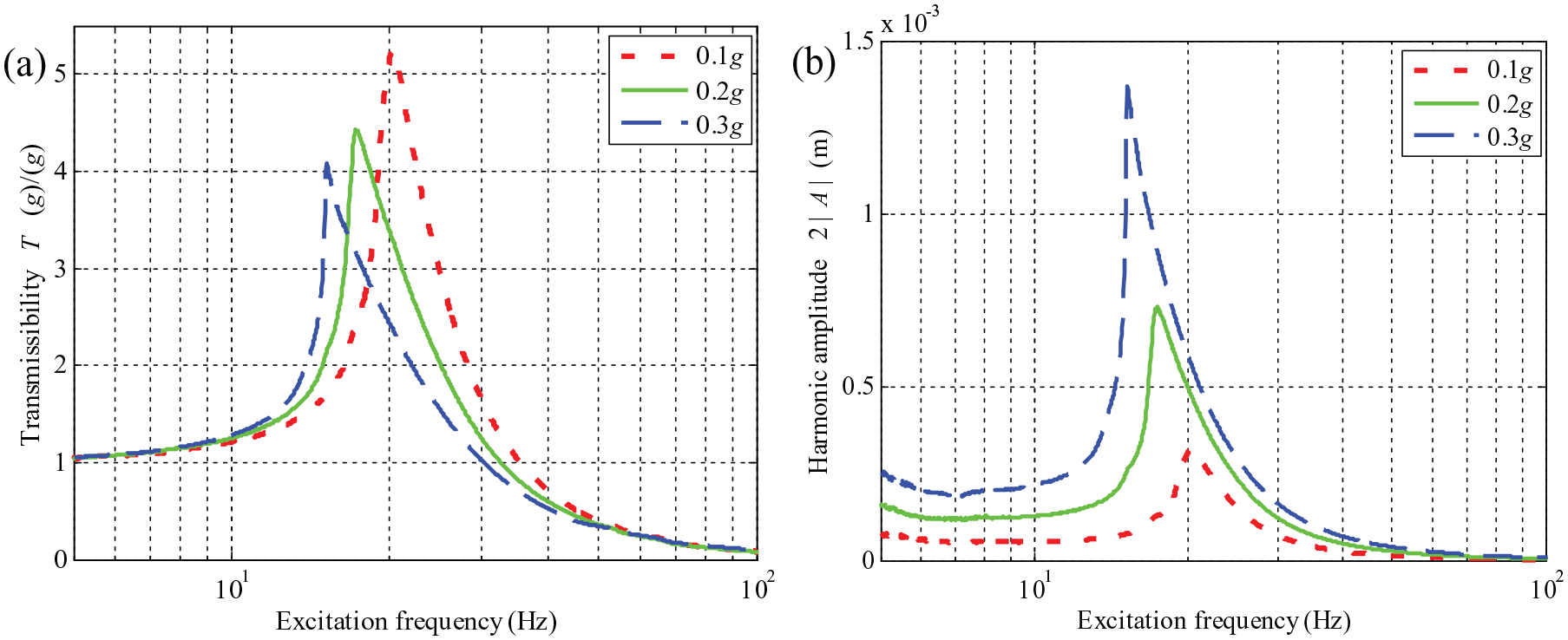
Frequency response curves (FRCs) of spacer fabric under different excitation levels: (a) acceleration transmissibility T versus excitation frequency and (b) harmonic amplitude
The curve shape near resonance peak is close to symmetric for 0.1 g excitation level, in which case the dynamic load and dynamic deformation for spacer fabric is relatively small, so it can be treated as a linear vibration system. For 0.2 g and 0.3 g excitation levels, however, the vibration behavior of the mass-spacer fabric system exhibits softening nonlinearity as the curves bend to the left side around resonance peaks. It is also shown that as the excitation level increases, the harmonic amplitude increases as well, but at the same time, the degree of nonlinear softening increases, that is, the peak acceleration transmissibility and the resonance frequency decreases, which implies the decrease of dynamic stiffness of the mass-spacer fabric system, referring to the equation
Mathematical modeling
Building the equation of motion
Since the vibration takes place in the vertical direction, the mass-spacer fabric vibration system is simplified as unidimensional. Due to polymeric viscoelasticity, the dynamical mechanical behavior of spacer fabric is different from the static mechanical behavior in that the history states also affect the current state of the dynamical system. As a result, the stiffness coefficients identified from the quasi-static compression curve in Figure 1(d) cannot well describe the vibration behavior of spacer fabric. Therefore, a phenomenological model is proposed in this study based on the nonlinear softening phenomenon observed in the vibration experiment. In this case, spacer fabric is treated as a nonlinear spring with linear, quadratic and cubic stiffness coefficients k,

Schematic of the mass-spacer fabric system: (a) vibration test and (b) the phenomenological model.
When the quadratic stiffness coefficient
At the resting state, a static force balance leads to

where

Let

where x is the dynamic deformation of spacer fabric. The harmonic displacement of the forced oscillation can be expressed as

Furthermore, in order to account for the viscoelasticity of weft-knitted spacer fabric, a fractional derivative term

Approximate analytical solution
The solution of the above equation mainly referred to the research work by Deng 42 and by Abolfathi. 51 The dynamic deformation of spacer fabric x depends on the excitation frequency, so that the frequency-domain solution of x is obtained by using the harmonic balance method 52 (HBM) with the first-order approximation here. To use the HBM, the coordinate system is transformed in order to change the asymmetric elastic force caused by the quadratic term into a symmetric elastic force containing a linear and cubic term, plus a constant force.51,53 The transformation is shown as below.
The polynomial has a relation of equivalence as follows:

which results in

Let the new coordinate be

On the other hand, the fractional derivative of constant δ is

where

At last, the equation of motion is transformed into

Solving the unknowns

in which

where

Using the HBM, to equate the constants on both sides of equation (11), we have

The static displacement

where

Equating the coefficients of

The equation above can be simplified as

Further split into real and imaginary parts as

and multiplied by

where

Equation (19) can also be squared to obtain

which is used to recover the harmonic amplitude (
Fitness function and goodness of fit
Given the expression of harmonic amplitude versus excitation frequency relationship, the next procedure is to find the optimal parameter estimates that best describe the vibration behavior of the mass-spacer fabric system by optimization strategy, which can be stated as

where

where

The value of

Experimental data for the mass-spacer fabric system under 0.1 g, 0.2 g, and 0.3 g excitation level conditions were used for fitting. The raw data on a logarithmic scale in the frequency range of 10–25 Hz were converted into the linear scale format by interpolation. If the selected frequency range is too wide, the nonlinear resonance peak will have a lowered weighing factor during fitting, so the nonlinear feature at resonance may not be well captured. By optimizing the fitness function in equation (24), parameter estimates of
Results of curve fit
Figures 4 and 5 show the fitted curves of amplitude-frequency responses of the static displacement

Harmonic amplitude

Static displacement
In order to examine the contribution of viscous damping coefficient c and fractional derivative term
Summary of the root mean square errors (RMSEs) from curve fits using three variants of model structures.

The physical significance of the fractional derivative term
Reconstructed force-displacement curve
To reconstruct the elastic force-displacement curves in the form of polynomials, the fractional derivative term
Parameter estimates by curve fit.

Spacer fabric is pre-stressed by a load mass. During harmonic excitation, the compressive displacement for spacer fabric changes dynamically. The emergence of the bias force β in equation (11) is due to the existence of an asymmetric stiffness term
In order to trace the frequency response curves (FRCs) to the nonlinear stiffness terms of the system, we let

(a) The reconstructed elastic force-displacement curve
Parameter analysis
Backbone curve and the loci of peaks of the FRCs
To study the effects of excitation level on the FRCs, the loci of peaks of the FRCs concerning the harmonic amplitude, the static displacement and the acceleration transmissibility, and the backbone curves concerning the harmonic amplitude and the static displacement were used in order to track the trends of peak values and the resonance frequency. The derivations are shown as below, which referred to the work by Abolfathi. 51
At resonance, we have


and

from equations (14), (20), and (21), at resonance, we will have

As a result, the locus of harmonic amplitude at resonance is

It is observed that the locus of harmonic response is not only a function of the excitation frequency, but also a function of the excitation level, load mass, viscous damping coefficient and the fractional derivative term. It does not depend on the stiffness of the system. Substituting equation (28) into equation (16), the locus of static displacement is solved accordingly.
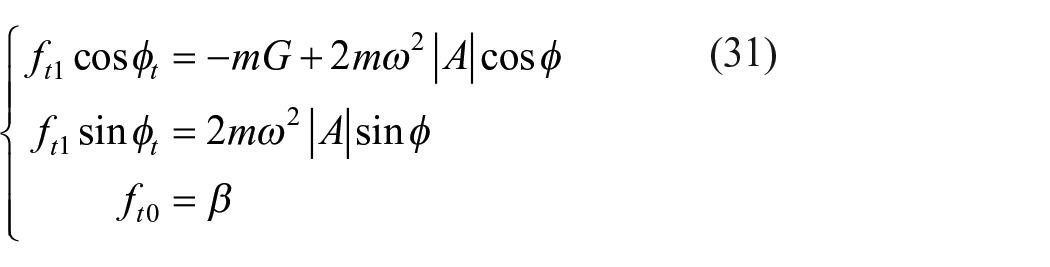
The transmitted force is composed of a harmonic component and a static component

Since

we have now
Using


and

from equations (14), (20), and (21), the transmissibility becomes
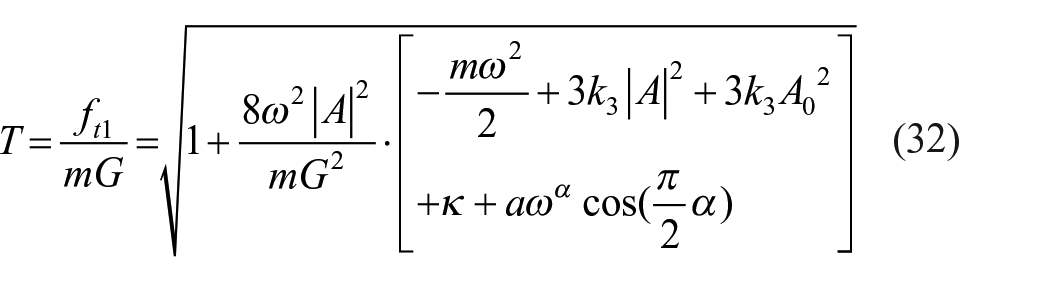
The locus of peak transmissibility is obtained by setting phase angle
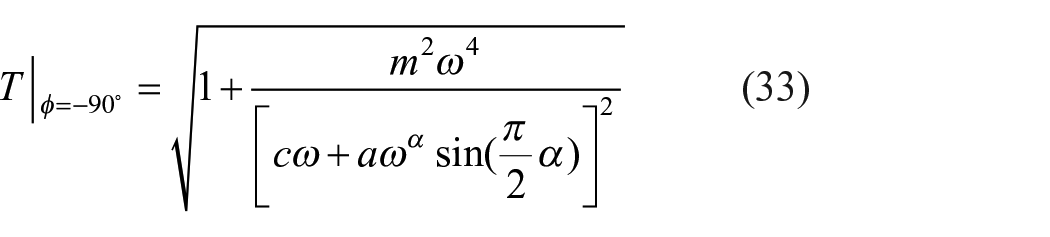
If we let

and substituting
Effect of excitation level G
When the excitation level is very small, the system oscillates with a very limited amplitude around the statically loaded position. The tangential stiffness at the statically loaded position is the linear stiffness k. When the harmonic amplitude becomes infinitesimal, the backbone curve intercepts with the horizontal axis at the frequency

Effect of excitation level G on: (a) static displacement
Numerical simulation
Given the model parameters

The MATLAB/Simulink block diagram, with the Oustaloup filter implemented for the approximation of the fractional derivative operator.
Experimental versus analytical
Figure 9 shows the frequency response curve (FRC) obtained by the numerical method, in comparison with the experimental data and the analytical approximation of the harmonic amplitude

Numerical result (“+”) in comparison with the experimental data (“○”) and the analytical approximation (“•”), with model parameters identified by fitting with experimental data of the 0.1 g excitation level.
Numerical versus analytical
Figure 9 also evaluates the difference between the numerical result and the analytical approximation. For all three excitation level conditions, the numerical results (in plus sign “+” line) and the analytical approximations (in dotted “•” line) agree well under both high excitation frequencies which are larger than resonance frequencies and very low excitation frequencies. For the 0.1 g excitation level at resonance, an evident difference occurs between the numerical result and the analytical approximation. However, this difference is absent for the model eliminating the fractional derivative term. For excitation frequencies larger than 10 Hz, a discrepancy between the numerical results and the analytical approximations occurs. To explain this discrepancy, periodic solutions for the dynamic displacement of spacer fabric in the time domain are obtained. Time-domain numerical representations for spacer fabric under the 0.1 g excitation level are shown in Figure 10, which includes the time series, phase portrait and Fourier amplitude spectrum for the steady-state solutions when the excitation frequency varies from 8 to 14 Hz. The time series diagram contains the displacement of vibration platform and the displacement of fabric deformation. Phase portrait depicts the trajectories of a dynamic system in the state space, in which the horizontal and vertical axes represent the state variables of displacement and velocity. The closed trajectory in the phase portrait is a limit cycle. For a linear system under sinusoidal excitation force, the limit cycle appears as an oval. However, the limit cycle becomes distorted in a nonlinear system as is shown here. The peak at the driving frequency ΩΩ and the peak at zero frequency in the Fourier amplitude spectrum represents the primary harmonic and the static displacement, respectively. The magnitudes of

Time series, phase portrait and Fourier amplitude spectrum for the dynamic displacement of spacer fabric under 0.1 g excitation level at different excitation frequencies: (a) 8 Hz, (b) 10 Hz, (c) 12 Hz, and (d) 14 Hz. In the Fourier amplitude spectrum,
The asymmetric period shape shown in the time series and the symmetry-breaking trajectory in the phase portrait suggest an even order harmonic distortion, which is caused by the quadratic stiffness term in the elastic force. This even order harmonic is represented by a peak at frequency 2Ω

It results in a symmetric model with parameters
Conclusion
To promote the use of knitted spacer fabric for the protection of human body from vibration exposure, this study aims at a comprehensive understanding of the vibration behavior of the mass-spacer fabric system under harmonic excitation, with the use of experimental, analytical and numerical methods.
Experimental results of the acceleration transmissibility curve of the mass-spacer fabric system showed that increasing the vibration level gives rise to a nonlinear softening type of transmissibility curve, and it also results in a broadened isolation region. The nonlinear softening phenomenon in vibration is correlated with the nonlinear compressive force-displacement relationship of spacer fabric. As a result, to build an analytical model to describe the periodic response of the mass-spacer fabric system under harmonic excitation, a linear mass-spring-damper vibration model can only be acceptable for very small excitation levels. For large excitation levels, however, force nonlinearity should be considered. In our study, the analytical model uses an asymmetric polynomial composed of linear-quadratic-cubic stiffness terms to describe the nonlinear force of knitted spacer fabric. Besides, a fractional derivative damping term is used to account for the viscoelasticity, which outperforms viscous damping by giving a higher level of the goodness of fit. The frequency-domain solution to the governing equation of motion was obtained using harmonic balance method (HBM).
Parameter analysis shows that frequency response curves (FRCs) can be softening, hardening and mixed softening-hardening depending on the magnitude of excitation level. Under small excitation levels, the linear stiffness is responsible for system dynamics. Under larger excitation levels, nonlinear stiffness terms start to exert their influences. With the increase of excitation level, resonance peak becomes softening first and then hardening, due to the quadratic and cubic stiffness terms, respectively. On one hand, the cubic stiffness causes hardening behavior in the FRCs, characterized by peak bending to the right. Cubic stiffness results in symmetrical vibration response for displacements away from the statically-loaded position to two opposite directions. On the other hand, the quadratic stiffness causes softening behavior in the FRCs, characterized by peak bending to the left. Quadratic stiffness also results in biased vibration response and causes an even order harmonic distortion in the numerical simulation.
Stemming from an empirical observation of nonlinear vibration by experiment, the proposed model cannot directly reveal the inherent mechanism of how material and structural properties of knitted spacer fabric act on the vibration dynamics. However, this could be done in future by performing a correlation analysis between model parameters and experimental variables, including material properties and structural properties such as the initial curvature of the three-dimensionally buckled monofilament. The current mathematical model provides a theoretical background for the development of weft-knitted spacer fabric as vibration isolator in the future. Using this model, parameter estimates from one excitation level condition can be used to predict the vibration behavior for a different excitation level condition when the excitation frequency is not at resonance. However, for the prediction of the nonlinear vibration at resonance, this model needs to be improved in future studies.
Footnotes
Acknowledgements
The authors would like to acknowledge the funding supports from the Research Grants Council of HK Special Administrative Region Government (Grant No. 516011) and the Textile Vision Basic Research Program (Grant No. J202004).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.