
Abstract
In this article, we consider the problem of optimally selecting a subset of transmitters from a transmitter set available to a multiple-input and multiple-output radar network. The aim is to minimize the location estimation error of underlying targets under a power constraint. We formulate it as a minimum-variance estimation problem and show that the underlying variance reduction function is submodular. From the properties of submodularity, we present a balanced selection policy which minimizes the worst-case error value using a minimax strategy. A greedy algorithm with guaranteed performance with respect to optimal solutions is given to efficiently implement the scheduling policy. The effectiveness and the efficiency of the proposed algorithm are demonstrated in simulated examples.
Keywords
Introduction
The idea of multiple-input multiple-output (MIMO) radar was first introduced by Fishler et al.1,2 Since then, it has been extensively investigated.3–7 There are, broadly speaking, two categories of MIMO radars: collocated MIMO radars and distributed MIMO radars. We in this article focus on the latter, which has widely separated transmitters and receivers. It may perform much better than a conventional radar on information collection capability, 8 which comes from the synchronization of the network with a centralized processing capability and the utilization of the independency among multiple transmitter–receiver channels. 9 Comparing with a conventional radar, one pro of a distributed MIMO radar is its capability of attaining the spatial diversity gain. That is, the widely separated transmitters/receivers can provide rich information on the spatial scattering properties of a target since they are able to capture different cross sections of the target. To this end, target scattering scintillations might be avoided. Therefore, a distributed MIMO radar may outperform a conventional radar in the detection of low-observable targets. 10
In order to exploit the potential sensing capability of a distributed MIMO radar, it is of importance to develop a sophisticated signal processing and resource management system that can extract desired information from the MIMO radar as much as possible with various constraints. For example, which transmitters and receivers are involved in the operation have a great impact on the sensing capability of a distributed MIMO radar. For a multistatic radar network, its geometric topology significantly influences the performance of target localization. 9 The work of Godrich et al. 11 showed that the performance of a distributed MIMO radar is related to signal-to-noise ratio (SNR), the number of transmitters and receivers involved, signal bandwidth, and so on. Accordingly, dynamic selection of transmitters/receivers of a distributed MIMO radar for maximizing its sensing performance is required. In practice, the network communication capability and power availability of a distributed MIMO radar restrict the number of transmitters/receivers that can be scheduled in a joint signal processing. The main challenge behind the selection of transmitters/receivers is to create a balance between the power that is consumed by transmitters/receivers and the amount of information acquired.
Much work has been done on the selection of transmitters/receivers for MIMO radars. Godrich et al.
6
used Cramér–Rao lower bound (CRLB) as an optimization metric, and considered two power allocation problems for a single target localization. One is to minimize the total power of transmitters subject to a predefined localization performance being met, while the power of each transmitter is restricted to an allowable range. The other is to maximize attainable localization performance with a given total power budget. Since both of the two problems are non-convex and non-linear, constraint relaxation and field decomposition were used to obtain approximate solutions. Godrich et al.
7
introduced two transmitter and receiver selection problems for a single target localization. Again CRLB was taken as a metric of optimization and two selection policies were considered. One is to minimize the number of transmitters and receivers subject to a given constraint on localization performance and the other is to select
Wang et al. 20 considered the transmitter selection problem in an MIMO radar network for multitarget localization, which was formulated as an estimation variance minimization problem with a submodular variance reduction function. A weighted average policy (WAP) was used to optimize the selection of transmitters with a power budget constraint. Based on submodularity, a polynomial computational time algorithm with a guaranteed accuracy was proposed. Tohidi et al. 21 considered the problem of joint antenna and pulse placement for angle of arrival and velocity estimation in a colocated MIMO radar, where the CRLB for the angle and velocity estimator was used as the performance criterion and a submodularity-based algorithm with performance guarantee was proposed to solve the problem. Based on convex optimization, Yan et al. 22 developed two optimal resource allocation schemes for asynchronous multitarget tracking in heterogeneous radar networks. However, none of the abovementioned work considered the balanced selection policy, which is our focus in this article.
We consider the problem of selecting transmitters with balance between multiple targets under a power budget constraint for a distributed MIMO radar network consisting of multiple transmitters and receivers. We illustrate our problem in Figure 1, where two targets are localized by a distributed MIMO radar network consisting of five transmitters (For the sake of clarity, the receivers are not plotted.). Suppose that, because of a power budget constraint, we are allowed to select at most three transmitters to illuminate the two targets. The variance of the estimated target location is used as the performance metric. The right two plots of Figure 1 show the possible results of two different selection policies: unbalanced policy and balanced policy (BP). Although the total variance of the two targets obtained by unbalanced policy (top right plot) is less than that obtained by BP (bottom right plot), the variance of Target 1 under the former is higher than that under the latter, which is not desired. We seek to perform equally well with respect to the two targets. Formally speaking, the objective function of BP tries to maximize the least variance reduction (or, equivalently, minimize the greatest variance) using a maximin (minimax) strategy. After showing that the defined objective function under consideration is submodular, we then adapt the Saturation algorithm in Krause et al. 23 to solve the problem. As WAP, the introduced greedy-based algorithm has a performance guarantee, that is, an upper bound on the least variance reduction is provided for the obtained solution of the algorithm. In summary, the innovation of this article is as follows: (1) a proof is provided that the variance reduction function derived based on CRLB is a non-decreasing submodular function and (2) a fast and balanced solution with performance guarantee is proposed for the problem of selecting transmitters under a power budget constraint in the presence of multiple targets for a distributed MIMO radar.

Illustrations of balanced selection policy for a distributed MIMO radar. Left: a distributed MIMO radar for target localization. Top right: the result of unbalanced transmitter selection. Bottom right: the result of balanced transmitter selection.
The remainder of this article is organized as follows. The system model for target localization in a distributed MIMO radar network is described in section “Modeling.” There we derive the Fisher information matrix (FIM) of the underlying network parameterized by a target’s location. The transmitter selection problem in terms of BP objectives and the corresponding solutions are proposed in section “Problem formulation and solution.” We present the simulation results in section “Simulated scenarios” and conclude this article in section “Conclusion.”
Modeling
In this section, we describe the models we introduce for the distributed MIMO radar network and the measurements obtained by the MIMO radar network. We then provide a rigorous derivation of CRLB on the estimation of target localization. Based on CRLB, we define the variance reduction function as the performance metric as the transmitter selection and prove that it is submodular.
The MIMO radar network
Like the assumptions made in Godrich et al.,6,7 we consider a distributed MIMO radar that consists of M transmitters and N receivers. We assume that all transmitters and receivers are time synchronized, widely separated, and located in a plane. Let
Measurement model
The underlying MIMO radar network is designed as such that each of the N receivers is able to separate the mixture of transmitted signals by exploiting the orthogonality between the transmitted waveforms. Denote

Let

where c is the light speed. The signal transmitted by transmitter m, and received by receiver n has the following baseband representation

with

Let

where

Under a centralized measurement processing consideration as aforementioned, we denote the measurement vector at a specific time t as
As in Wang et al., 20 our aim is to estimate the location of all targets in the region of interest based on the measurements using a portion of transmitters/receivers. We address this problem via minimizing the variance of localization error subject to the given constraint on power. Next, we derive a variance reduction function based on CRLB and show that it is submodular. Accordingly, the optimization problem can be efficiently addressed using the properties of submodularity.
The variance reduction function based on CRLB
It is understood from information theory that CRLB provides a lower bound for the mean square error (MSE) on parameter estimation via an unbiased estimator. The MSE of a maximum likelihood estimator (MLE) may approach the CRLB as SNR is large (say, over 10 dB).11,26 Therefore, we derive the CRLB of target localization using measurements from the MIMO radar as a function of transmitter power allocation and it is served as the cost function for our optimization problem.
Given a vector parameter

where

where
By assuming that different transmitter–target–receiver channels are independent, the FIM for target i with respect to

where
The derivation of equation (9) is given in Appendix 1.
Therefore, denoted by

Given the set of transmitters

We define the variance reduction function

We next show that the objective functions equation (13) satisfy the following intuitive diminishing returns property: adding a pair of transmitter-receiver reduces variance more if we have assigned few pairs of transmitter-receiver so far, and less if we already assigned lots of pairs of transmitter-receiver. This intuition can be formalized using the combinatorial concept of submodularity.27,28 More specifically, let E be a ground set. A set function

Theorem 1
The objective function defined by equation (13) is a non-decreasing submodular function. The proof is given in Appendix 1.
Problem formulation and solution
The balanced transmitter selection problem
In the final section, variance reduction of target localization estimation as a function of transmitting signal power is derived based on CRLB, which serves as a minimization cost function for selecting a subset of transmitters and receivers. Such a selection/scheduling is subject to a total transmitting power constraint. For simplicity, we assume that all receivers are activated for all time to receive signals, although the proposed algorithms can be extended to the case of selecting transmitters and receivers simultaneously.
In Wang et al., 20 WAP, which optimizes an average localization performance for all targets through weighting, was proposed for selecting a subset of transmitters which maximizes the objective function under the total power constraint. As aforementioned, if we optimize for the average performance with WAP, it can happen that a few of the targets are poorly localized, that is, there may exist some targets whose localization error variance reduction is insignificant, which can be problematic for security-critical applications. Alternatively, we may optimize variance reduction of the targets based on a balanced selection. Specifically, we maximize the minimum of each target’s variance reduction subject to the total power constraint. That is

In equation (14), the objective function of BP tries to maximize the least variance reduction using a maximin strategy. In this way, we seek to perform equally well with respect to each target. As the robust submodular observation selection (RSOS) problem in Krause et al. 23 (we will next describe it in detail) which is proved to be NP-hard, equation (14) is an NP-hard problem. Therefore, approximate solutions are sought. In particular, approximate algorithms with polynomial-time computational complexity and performance guarantee are preferred.
A balanced subset selection policy
Although each

where
Next, we adapt the Saturation algorithm in Krause et al. 23 to solve equation (15), and propose a subset selection algorithm for transmitters as in Algorithm 1.
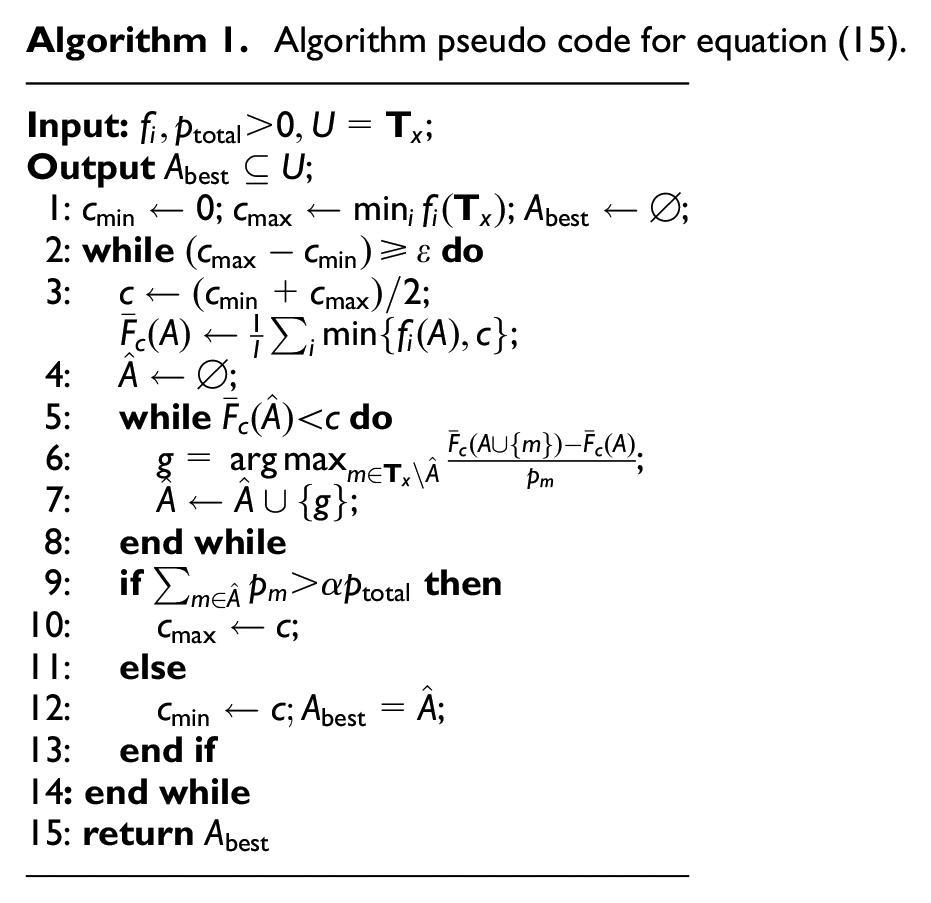
In the vein of the Saturation algorithm,
23
in Algorithm 1, c is an upper bound to equation (14). The lower bound
Theorem 2
For the objective function defined in equation (14) and
The computational complexity of Algorithm 1 is
More specifically, for any real number
Numerical simulation and analysis
In this section, we demonstrate the performance of Algorithm 1 considering two simulated scenarios on multitarget localization of a distributed MIMO radar. Under a small scale of an MIMO radar, we are able to compare the performance of Algorithm 1 with that of the optimal solutions. We also compare the performance differences between Algorithm 1, WAP, 20 and the particle swarm optimization (PSO) algorithm.30–32
PSO, which conducts search using a population of particles, is a kind of heuristic algorithms that can be applied to minimax optimization problems.
30
To ensure an improved convergence of particles, we adopt the binary PSO algorithm in Nezamabadi-pour et al.
31
to solve equation (14). In the initialization of the binary PSO algorithm, a population of particles is generated. Each particle represents a potential solution, that is, a binary code, of which the length is the total number of transmitters M. The mth bit of the code is randomly set as 0 or 1. The transmitter m is selected if the mth bit of the code is 1; otherwise, the transmitter m is not selected. For each iteration, the following steps are performed until a termination condition, such as the maximum number of iterations is reached, is met. (1) The objective function
Performance of the three algorithms is measured in terms of localization accuracy and computational efficiency. Note that in the simulations, once we derive the results of variance reduction, we then calculate the corresponding variance (i.e.
Simulated scenarios
The performance of Algorithm 1 will be checked via Scenario 1, by which we also compare the performance of Algorithm 1 with WAP and PSO. Statistical results of Algorithm 1 and PSO are generated via Scenario 2.
Scenario 1: the MIMO radar consists of
Scenario 2:
Case 1: assume there are
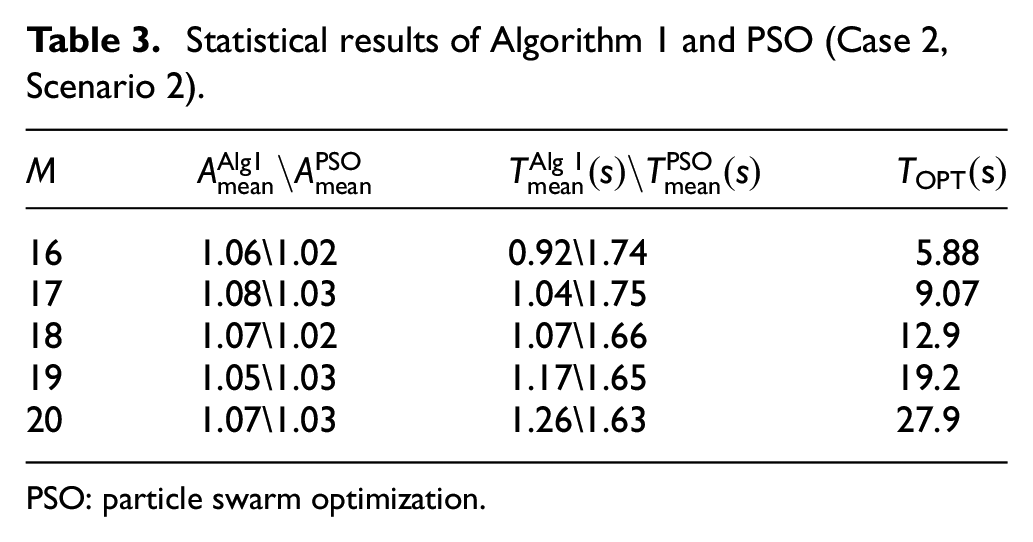
Case 2: we assume that the number of transmitters is
Case 3: assume that the configuration of the MIMO radar network is the same as that in Case

Illustrations of locations of transmitters, receivers, and targets in Scenario

Illustrations of locations of transmitters and receivers in Case
Simulation results and analysis
The observations and analysis of the simulations are summarized as follows.
BP
In Scenario 1, the signal decay factor l is assigned to

Selected transmitters of optimal solution (OPT), Algorithm 1 (Alg 1), WAP, and PSO in Scenario 1: (a)
The variances of the two targets under each value of l obtained by OPT, Alg 1, WAP, and PSO in Scenario 1.
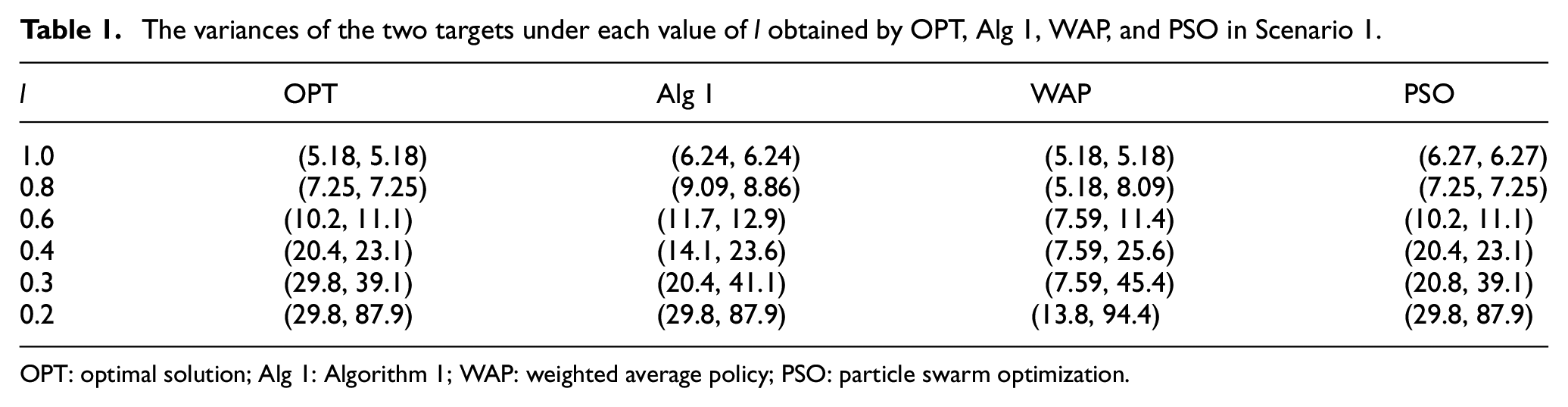
OPT: optimal solution; Alg 1: Algorithm 1; WAP: weighted average policy; PSO: particle swarm optimization.
From Table 1 and Figure 4, we observe that, when
In the case that
It is worth mentioning that since
Comparison of Algorithm 1 with WAP and PSO
We run WAP and PSO on Scenario
Statistical performance
As a way to analyze the robustness of Algorithm 1, we perform Monte Carlo multiple runs on the three cases in Scenario

where
Statistical results of Algorithm 1 and PSO (Case

PSO: particle swarm optimization.
Statistical results of Algorithm 1 and PSO (Case 2, Scenario 2).
PSO: particle swarm optimization.
Statistical results of Algorithm 1 and PSO (Case 3, Scenario 2).

PSO: particle swarm optimization.
Conclusion
We have addressed the problem of transmitter subset selection subject to a power budget constraint in a distributed MIMO radar for minimizing the variance of target localization error. For a given transmitter/receiver configuration, we explicitly derived the CRLB, which is a function of target location, and depicts the minimum achievable localization error. Based on the CRLB, for a subset of transmitters, we defined a variance reduction function and used it as the optimization objective. We proved that the variance reduction function is a non-decreasing submodular function. By exploiting submodularity of the objective function, a balanced selection policy, which has performance guarantee and polynomial-time computational complexity, was adopted to solve the underlying problem.
Footnotes
Appendix 1
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article.