We consider the composite hypothesis testing problem of time-bandwidth-constrained distributed detection. In this scenario, the probability distribution of the observed signal when the event of interest is happening is unknown. In addition, local decisions are censored and only those uncensored local decisions will be sent to the fusion center over a shared and noisy collision channel. The fusion center also has a limited time duration to collect transmitted decisions and make a final decision. Two types of medium access control that the sensor nodes apply to send their decisions are investigated: time division multiple access and slotted-Aloha. Unlike using the time division multiple access protocol, the slotted-Aloha-based distributed detection will experience packet collisions. However, in this article, since only uncensored decisions are sent, packet collisions are informative. We derive fusion rules according to generalized likelihood ratio test, Rao test, and Wald test for both the time division multiple access–based distributed detection and the slotted-Aloha-based distributed detection. We see that the fusion rules for the slotted-Aloha-based distributed detection here also exploit packet collisions in the final decision-making. In addition, the asymptotic performances and energy consumption of both schemes are analyzed. Extensive simulation and numerical results are provided to compare the performances of these two schemes. We show that, for a given time delay, the slotted-Aloha-based distributed detection can outperform the time division multiple access–based distributed detection by increasing the number of sensor nodes which results in higher energy consumption.
In distributed detection,1 we concern with a detection problem that the area of interest is larger than the sensing range of one detector and the signal of the event we are observing might cover only a region of the monitored area. In such case, only one detector is not applicable to detect the event properly, for example, biochemical-substance leaking detection,2,3 cooperative spectrum sensing,4–6 and so on. Therefore, a wireless sensor network (WSN) has been applied to distributed detection whose scheme consists of sensor nodes and a fusion center (FC). The sensor nodes are deployed in the monitored area to observe the event and make a local decision about the existence of the event. These local decisions are then transmitted over wireless channels to the FC. Since the local decisions are not equally reliable, the FC combines them according to a fusion rule to make a final decision about the existence of the event.
A fusion rule used to compute a final decision depends on the WSN’s architecture in distributed detection which consists of sensor nodes, communication channels/protocols, and a FC. Different combinations of these elements’ specifications/processing/structures result in different fusion rules’ algorithms: for example, fusion rules where local decisions transmitted over fading channels,7–11 fusion rules where differential modulation is used,12 fusion rules for multi-hop clustered WSNs,13,14 and fusion rules for the FC equipped with multiple antennas.15
Finding the optimal fusion rule is a task in designing distributed detection since its performance provides a benchmark for subsequent suboptimal fusion rules whose complexity might be significantly lower. The optimal fusion rules can be derived using the Bayes’ theorem,16 which requires the following information: the probability that the event occurs (i.e. ), the probability that the event is absent (i.e. ), and both conditional distributions of the observations given and . However, since the conditional distribution of the observation given is parameterized by, for example, event’s location and signal strength, an assumption on knowing this distribution might not be practical. To solve this issue, distributed detection might be formulated as a composite hypothesis testing problem,16 where fusion rules based on generalized likelihood ratio test (GLRT), Rao test, and Wald test approaches were derived.
In addition, designing distributed detection is a resource-constrained problem with, basically, limited energy consumption and bandwidth. Main energy consumption in distributed detection is from local decision transmissions.17 Therefore, many transmission strategies have been proposed to spend energy efficiently. For example, the sensor-censoring strategy18,19 suggests that only reliable (uncensored) local decisions should be transmitted to the FC and the ordered-transmission strategy20,21 further points out that transmitting local decisions in order of their reliabilities will help saving both the energy and the collection time. Note that the collection time is the time duration that the FC spends to collect local decisions. To solve the problem of limited bandwidth, many distributed detection schemes whose local decisions are transmitted over a multiple access channel (MAC) have been extensively analyzed.10,11,22 In the MAC model, sensor nodes are allowed to transmit their local decisions over a shared channel simultaneously. Those transmitted signals are coherently/noncoherently combined at the FC and are further applied to a fusion rule to make a final decision. Computation complexity of the MAC-based fusion rule depends on the model assumption. The MAC-based fusion rules are derived from a physical-layer perspective, where the inputs to the fusion rules are the received signals.
Distributed detection and fusion rules might be designed from a medium access control perspective. In this scenario, we will consider that local decisions are transmitted over a shared collision channel23 that divides time into time slots. Local decisions are transmitted within time slots. As a result, there will be three time-slot states: idle, successful, and collision time slots. These time-slot states are defined as follows. A time slot is called as an idle time slot if no sensor nodes transmit their decisions within this time slot. A time slot is called as a successful time slot if only one sensor node transmits its decision within this time slot. A time slot is called as a collision time slot if two or more sensor nodes transmit their decisions within this time slot (and these local decisions cannot be recovered). For example, slotted-Aloha has been applied to schedule local decision transmissions in distributed detection whose local decisions are transmitted over a shared collision channel.24–28
Motivation and contributions
For the collision channel model, two medium access control protocols are generally applied to schedule transmissions: time division multiple access (TDMA) and random access, which, in this article, we are interested in the slotted-Aloha protocol without retransmissions. Using the TDMA protocol, where each sensor node is given an exclusive time slot (which is organized by network administrators) to transmit its decision, the FC will always successfully receive the local decisions. On the contrary, using the slotted-Aloha protocol will induce some packet collisions at the FC since each sensor node decides to transmit its decision at a time slot with a probability. In data networks,23 where the data packet must be received successfully, using the TDMA protocol achieves a higher throughput than that of using the slotted-Aloha protocol. However, in distributed detection when only uncensored decisions will be sent to the FC who can recognize the collisions and exploit them in decision-making,28 it is interesting to find out when the distributed detection using the slotted-Aloha protocol outperforms the distributed detection using the TDMA protocol.
In this article, we consider the composite hypothesis testing problem of distributed detection, where the probability distribution of the observed signal when the event of interest is happening is unknown and the FC has a fixed time duration (delay) to collect local decisions transmitted over a shared and noisy collision channel (bandwidth and time constraints). Here, only the sensor nodes who decide that the event is happening will transmit their decisions to the FC. As a result, a collision is informative and indicates that two or more sensor nodes have decided that the event is happening.
Our main contributions of this article are as follows.
We derive the fusion rules based on GLRT, Rao test, and Wald test for the distributed detection schemes whose local decisions are transmitted according to the TDMA protocol.
We derive the fusion rules based on GLRT, Rao test, and Wald test for the distributed detection schemes whose local decisions are transmitted according to the slotted-Aloha protocol.
We derive and compare the asymptotic performances and energy consumption of these distributed detection schemes.
Consequently, our main results can be summarized as follows.
The fusion rules based on the GLRT, Rao test, and Wald test for the distributed detection using the TDMA protocol are shown. The FC will count the numbers of idle and successful time slots and apply them to these fusion rules to make a final decision. These fusion rules are simple. The GLRT fusion rule is in the form of a log-likelihood Chi-square test, while the Rao test fusion rule is in the form of a Chi-square test.
The fusion rules based on the GLRT, Rao test, and Wald test for the distributed detection using the slotted-Aloha protocol are shown. The FC will count the numbers of idle, successful, and collision time slots and apply them to these fusion rules to make a final decision. These fusion rules are complicated since they need to compute the minimum mean square error (MMSE) estimate of the number of sensor nodes who transmit local decisions to the FC and the variance of this MMSE estimate.
From the numerical results, under the bandwidth and time constraints, the performance of the distributed detection using the TDMA protocol is limited since its performance mainly depends on the number of time slots in the frame. Increasing the number of sensor nodes larger than the number of time slots in the frame does not help improving its performance. On the contrary, the distributed detection using the slotted-Aloha protocol can offer a better performance by increasing the number of sensor nodes while consuming more energy.
This article is organized as follows. Section “Related work” provides a short overview of the related work. The system model assumptions are described in section “Distributed detection system model.” Section “Fusion rules of TDMA-based distributed detection” explains about the distributed detection using the TDMA protocol and shows the corresponding fusion rules. Similarly, section “Collision-aware fusion rules of the slotted-Aloha-based distributed detection” explains about the distributed detection using the slotted-Aloha protocol and shows its corresponding fusion rules. Their performance metrics including asymptotic distributions and energy consumption are expressed in section “Performance metrics.” Numerical results are shown in section “Simulation and numerical results.” We conclude our work in section “Conclusions.”
Notation
Lower-case and upper-case bold letters denote vectors and matrices, respectively; denotes the transpose operator; and denote a probability and a conditional probability, respectively; and denote the expectation and variance of a random variable, respectively; denotes a binomial distribution of trials with probability of success ; denotes a normal distribution with mean and variance ; denotes a Chi-square distribution with degree of freedom; denotes a noncentral Chi-square distribution with degree of freedom and noncentrality parameter ; the symbols ~ and mean “distributed as” and “asymptotically distributed as,” respectively.
Related work
Composite hypothesis testing problems have been extensively studied in distributed detection.29–34 Fusion rules based on the GLRT, Rao test, and locally optimum-detection approaches under many scenarios have been derived and evaluated. However, all of them, here, are assumed that the local decisions are transmitted over PACs (parallel access channels). Instead, in our article, we derive GLRT, Rao test, and Wald test fusion rules where the uncensored decisions are transmitted over a shared and noisy collision channel.
Slotted-Aloha has been popularly exploited to schedule the local decisions sent to the FC when a shared collision channel is considered.24–27 In the slotted-Aloha protocol, two design parameters are of interest: the transmission probability24,27 and the retransmission strategy.25,26 For the distributed detection whose local decisions are transmitted in order of their reliabilities, it has been shown that the transmission probability maximizing the data throughput23 does not always optimize the performance of this distributed detection.27 These articles have treated collisions as errors and omitted them in making a final decision.
Actually, the collisions can be useful in decision-making with properly designing transmission strategies and fusion rules. Distributed detection whose FC recognizes the collision time slots, in addition to the idle time slots and successful time slots, and exploit them in final decision-making has been investigated and analyzed in many scenarios: the Neyman–Pearson framework,28 the sequential probability ratio test,35 and the Rao test.36,37 In our initial work,36,37 no channel errors have been considered and only the Rao test fusion rules for the slotted-Aloha-based distributed detection were derived. On the contrary, in this article, we comprehensively derives and extensively compares fusion rules based on the GLRT, Rao test, and Wald test for both the TDMA-based distributed detection and slotted-Aloha-based distributed detection, where channel errors exist.
Distributed detection system model
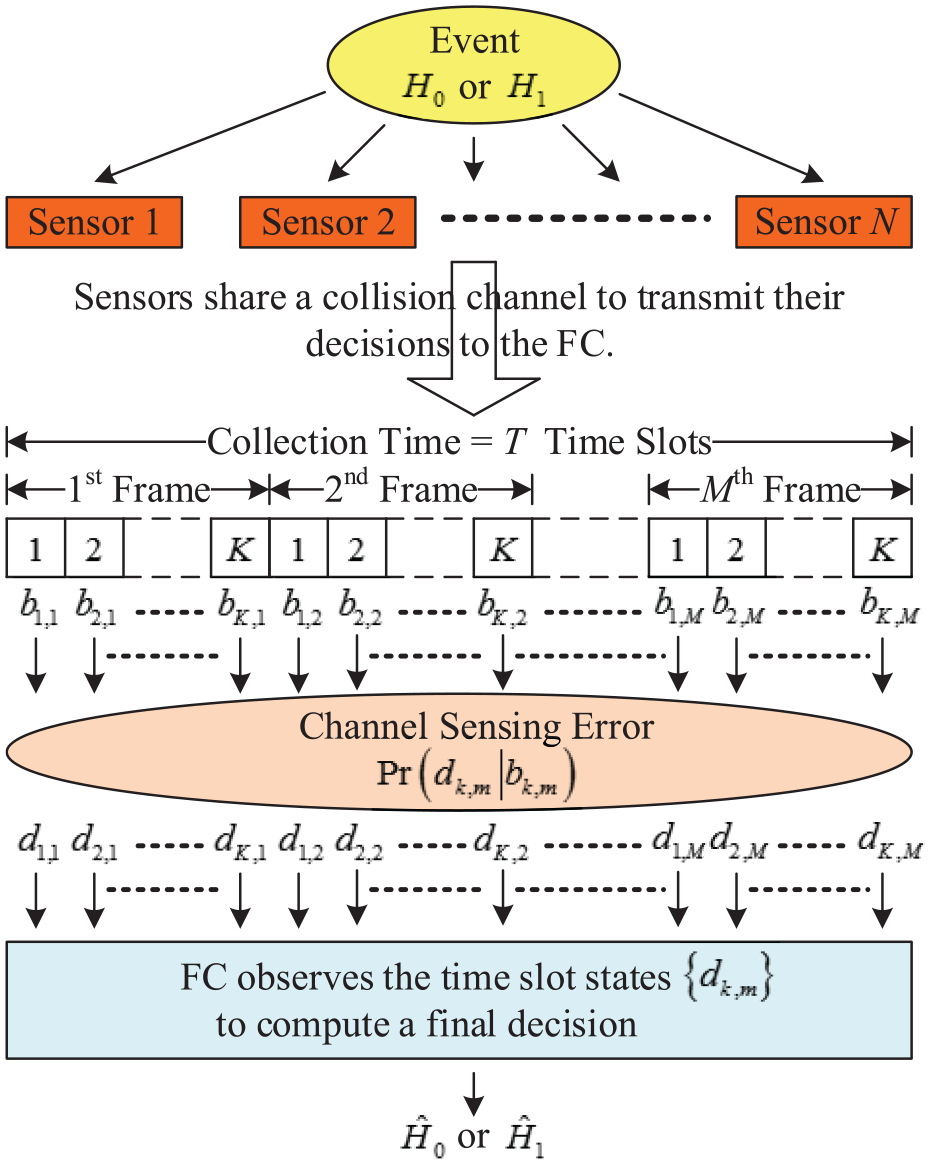
We consider a distributed detection system as shown in Figure 1. Its details are specified as follows.
Block diagram of distributed detection in a shared collision channel. There are sensor nodes monitoring the event of interest, and, then, make local decisions. Only decisions indicating the event is happening are transmitted over a shared collision channel to the FC. The collision channel is divided into time slots. The FC is allocated time slots (called the collection time) to collect the local decisions and makes a final decision at the end of the collection time. The collection time (T time slots) is divided further into frames and each frame consists of time slots.
Centralized fusion system
There are sensor nodes deployed in an area to monitor an event of interest. The FC will broadcast an inquiry about the existence of this event in the monitored area to start the local-decision collection process. Each sensor will make an observation, compute a binary decision (as indicated in section “Sensor processing, transmission rule, and time-slot states”), and send it to the FC via a single-hop wireless channel according to the TDMA protocol (as explained more in section “Fusion rules of TDMA-based distributed detection”) or the slotted-Aloha protocol (as explained more in section “Collision-aware fusion rules of the slotted-aloha-based distributed detection”).
Collision channel
We assume that the sensor nodes share a collision channel to transmit their decisions to the FC. The channel is divided into time slots, where the FC and sensors know when a time slot begins and ends (i.e. synchronous time slots). The FC has only time slots (called the collection time) to collect local decisions. This collection time is divided into frames and each frame consists of time slots. The length of each time slot is equal to the packet containing a local decision. The FC will make a final decision at the end of the collection time.
Sensor processing, transmission rule, and time-slot states
At the beginning of the mth frame, each sensor node senses the event and draws a new observation . If the observation is larger than or equal to the censoring threshold, the sensor node makes the local decision (uncensored decision indicating the event is happening); otherwise, the local decision is (censored decision indicating the event is absent). We apply that, at the mth frame, all sensor nodes exploit the same censoring threshold . To save an energy, only the sensor nodes with local decisions will transmit their decisions (i.e. ) to the FC over a shared and noisy collision channel. The medium access control protocols to schedule the local-decision transmissions are studied as explained further in sections “Fusion rules of TDMA-based distributed detection” and “Collision-aware fusion rules of the slotted-Aloha-based distributed detection.” According to the collision channel model,23 the following time slot states are classified: idle (0), successful (S), and collision (C) time slots. We assume that the collisions are solely from the transmissions of the sensor nodes in the considered network. We denote the actual time-slot state at the kth time slot in the mth frame as . More details of will be provided in sections “Fusion rules of TDMA-based distributed detection” and “Collision-aware fusion rules of the slotted-Aloha-based distributed detection.”
FC processing
At the end of the kth time slot in the mth frame, the FC senses the time-slot state denoted by instead of . Due to the nature of wireless channel and errors caused by physical-layer detectors, the sensed time-slot state at the FC might not be the same as the actual time-slot state . This sensing error is modeled by a conditional probability mass function (PMF) whose details will be specified in sections “Fusion rules of TDMA-based distributed detection” and “Collision-aware fusion rules of the slotted-Aloha-based distributed detection.” At the end of the collection time, the FC has observed the time slot states (as shown in Figure 1) and apply them into a fusion rule to make a final decision. Fusion rules for composite hypothesis testing are derived in sections “Fusion rules of TDMA-based distributed detection” and “Collision-aware fusion rules of the slotted-Aloha-based distributed detection.”
Binary composite hypothesis testing model
We assume that the noisy observation at a sensor node, , is governed by the following binary composite hypothesis testing model
where is the conditional probability density function (PDF) of given the hypothesis , for . Under this scenario, we assume that the is known while is unknown. The observations are assumed to be independent and identically distributed (IID) given , for , and among the sensor nodes and time slots. Let be the local decision of the nth sensor node drawing an observation at the beginning of the mth frame. As a result, the local decision can be modeled as a Bernoulli distribution. Specifically, the conditional PMF of given , denoted by , is equal to . Therefore, given a set of censoring thresholds , we recast our composite hypothesis testing problem as
where is known while is unknown and .
Fusion rules of TDMA-based distributed detection
In this section, we consider distributed detection whose sensor nodes share a collision channel by using the TDMA protocol to transmit their uncensored decisions to the FC. From now on, we refer to this scheme as the TDMA-based distributed detection. The TDMA protocol is a centralized transmission scheduling where each sensor node has been assigned an exclusive time slot to avoid a packet collision. This time slot assignment has been given in advance by the network administrators before the sensor node has sensed the event. Therefore, according to the censoring and transmission rule described in subsection “Sensor processing, transmission rule, and time-slot states,” at a time slot, the owner (assigned sensor node) might exploit this time slot to transmit its decision if ; otherwise, the owner keeps silent (and this time slot is idle).
By using the TDMA protocol, the sensor operation applied in this article can be described as follows. At the beginning of each frame, the sensor nodes who are assigned time slots to transmit their decisions in this frame will sense the event. As a result, there will be sensor nodes who sense the event in each frame. Thereafter, they will make local decisions according to the sensor censoring rule in subsection “Sensor processing, transmission rule, and time-slot states.” Those sensor nodes with the local decisions will transmit their decisions in their assigned time slots. On the contrary, those sensor nodes with the local decisions will keep silent to save some energy. The process here is repeated until the end of the Mth frame.
The mathematical model for the TDMA-based distributed detection can be formulated as follows. We consider the mth frame for . Because of using the TDMA protocol, the time-slot state of the kth time slot in the mth frame, , will be either or . The PMF of under is a Bernoulli distribution parameterized by , which can be expressed as
where is the indicator function. At the end of each time slot, the FC observes the time-slot state instead of due to a channel sensing error. This channel sensing error is modeled as a binary symmetric channel (BSC) whose PMF is
The conditional PMF of under is obtained from , where . Let denote . We can show that
At the end of the mth frame, the FC observes the following time-slot states: , , …, . The joint PMF of can be written as . In other words, the FC observes that there are idle time slots (i.e. the number of ) and successful time slots (i.e. the number of ) within the mth frame. Therefore, the joint PMF is equivalent to, when the FC observes
where , , and .
At the end of the collection time, the FC will observe the numbers of time-slot states , whose joint PMF is . Thereafter, the FC applies these numbers of time-slot states to a fusion rule to decide whether or is happening. The fusion rules for the composite hypothesis testing are provided in the proposition below.
Proposition 1
(TDMA-based fusion rules). Given the number of time slot states , where , is the number of idle time slots in the mth frame, and is the number of successful time slots in the mth frame. The GLRT, Rao test, and Wald test fusion rules for the TDMA-based distributed detection can be shown as follows.
1. The GLRT fusion rule can be expressed as
2. The Rao test fusion rule can be expressed as
3. The Wald test fusion rule can be expressed as
whereand.
The decision thresholds, , andare adjusted to achieve the desired performance.
Proof
The derivations of these fusion rules can be shown as follows.
where , , and is an maximum likelihood (ML) estimate of , which is obtained from . After substituting from equation (6) into equation (10) and some mathematical arrangements, we have
where and are and in equation (5) by replacing with . The ML estimate is the value such that . We can show that
From , , and after some mathematical arrangements, we obtain equation (9).
The operations of the fusion rules in Proposition 1 can be explained as follows. For the GLRT fusion rule as shown in equation (7), the FC computes the test statistic by comparing the number of time-slot states and to and , respectively. The term and are the expected numbers of the idle time slots and successful time slots under . If the event is happening, the FC would receive a higher number of successful time slots . As we can see from equation (7), the value larger than the mean indicates a likeliness of the event happening. Furthermore, when considering the test statistic carefully, we see that it is in a log-likelihood Chi-square test.
For the Rao test fusion rule as shown in equation (8), the FC counts the number of successful time slots , compares to the expected number of successful time slots under , and, then, normalized the square of the difference by the variance under . If the test statistic is within , the FC declares ; otherwise, the FC declares . When considering the test statistic carefully, as shown in the corollary below, it is a Chi-square test.
Corollary 1
The test statistic in (8) is a Chi-square test, which can be rewritten as
For the Wald test fusion rule as shown in equation (9), the operation is similar to that in the Rao test fusion rule except the normalized term, which is, here, an estimated variance under .
Collision-aware fusion rules of the slotted-Aloha-based distributed detection
In this section, we consider distributed detection whose sensor nodes share a collision channel by using the slotted-Aloha protocol (without retransmissions) to transmit their uncensored decisions to the FC. From now on, we refer this distributed detection as the slotted-Aloha-based distributed detection. The slotted-Aloha protocol is a decentralized transmission scheduling where each sensor node will decide to transmit its decision in a time slot with a probability called the transmission probability. As a result, packet collisions (i.e. two or more sensor nodes transmit their decisions in the same time slot) might occur. An advantage of using the slotted-Aloha protocol is that the network administrators do not need to assign a time slot to each sensor node, which will be a problem in a large sensor network.
By using the slotted-Aloha protocol, the sensor operation applied in this article can be described as follows. At the beginning of each frame, all sensor nodes will sense the event of interest. Thereafter, they will make local decisions according to the sensor censoring rule in subsection “Sensor processing, transmission rule, and time-slot states.” Those sensor nodes with local decisions will transmit their decisions in a time slot within this frame with a probability 1/K. In this article, we consider the transmission probability with this fixed value. However, we can assume it as a design parameter. Note that a sensor node with decision might transmit many times. Unlike the data network, repeated transmissions from the same sensor nodes within a frame are acceptable since the FC will apply the received local decisions to estimate the number of transmitting sensor nodes. On the contrary, those sensor nodes with the local decisions will keep silent to save some energy. The process here is repeated until the end of the Mth frame.
The mathematical model for the slotted-Aloha-based distributed detection is formulated as follows. We consider the mth frame for . At the beginning of mth frame, each sensor node will sense the event of interest and, then, will make a local decision according to the decision rule in subsection “Sensor processing, transmission rule, and time-slot states.” Let be the number of sensor nodes with decisions . The conditional PMF of parameterized by (i.e. given ) can be expressed as
where . These sensor nodes will transmit their decisions in a time slot with the transmission probability 1/K. Unlike the TDMA protocol, for the slotted-Aloha protocol, we have the actual time-slot state , where , , and denote the idle time slot, the successful time slot, and the collision time slot, respectively. Note that a collision time slot here is informative since it indicates that two or more sensors have sent their local decisions in this time slot. The conditional PMF of can be expressed as
At the end of each time slot, the FC observes the time-slot state instead of due to the channel sensing error. This channel sensing error is modeled as
The conditional PMF of given is obtained from , where . Let denote . We can show that
At the end of the mth frame, the FC observes the following time-slot states . The joint PMF of can be expressed as . In other words, the FC observes that there are idle time slots (i.e. the number of ), successful time slots (i.e. the number of ), and collision time slots (i.e. the number of ). Therefore, the joint conditional PMF is equivalent to, when the FC observes , , and
where , , , , and . In addition, we can write the joint conditional PMF of parameterized by (i.e. under ) as .
At the end of the collection time, the FC will observe the numbers of time-slot states , whose joint PMF is . Thereafter, the FC applies these numbers of time-slot states to a fusion rule to decide whether or is happening. The collision-aware fusion rules for the composite hypothesis testing are provided in the proposition below. Note that we use the term “collision-aware” because these fusion rules exploit the collision time slots in the final decision-making.
Proposition 2
(Collision-Aware Fusion Rules). Given the number of time slot states , where , is the number of idle time slots in the mth frame, is the number of successful time slots in the mth frame, and is the number of collision time slots in the mth frame. The GLRT, Rao test, and Wald test fusion rules for the slotted-Aloha-based distributed detection can be shown as follows.
1. The GLRT fusion rule can be expressed as
where, which is thesuch that.
2. The Rao test fusion rule can be expressed as
whereis a conditional expectation ofunderandis the variance ofunder.
3. The Wald test fusion rule can be expressed as
The decision thresholds, , andare adjusted to achieve the desired performance.
Proof
The derivations of these fusion rules can be shown as follows.
1. The GLRT fusion rule is directly obtained by substituting instead of into equation (10). The ML estimate is the value such that . We can show that
where is the minimum mean square error (MMSE) estimate of and computed from
Therefore, from equation (33), the ML estimate is the that makes .
2. The Rao test fusion rule is derived from equation (14) by using instead of . The derivative can be similarly obtained from equation (15), where
The FIM is obtained from equation (17). Similar to the steps in the proof in Proposition 1, we can show that if . For , from equations (19) and (33), we have
Since is the conditional expectation of the MMSE , we, then, have
3. The Wald test fusion rule is similarly derived from equation (22). The FIM can be obtained by applying the same steps shown in the Rao test fusion rule above, where is defined by equation (17), if , and can be obtained from equation (37).
The operations of the fusion rules in Proposition 2 can be explained as follows. For the GLRT fusion rule as shown in equation (30), the FC computes the maximum likelihood (ML) estimates , for . Thereafter, the FC puts these ML estimates into the test statistics and compares the result to the decision threshold to make a final decision.
For the Rao test fusion rule as shown in equation (31), the FC must compute the minimum mean square error (MMSE) estimate of the number of transmitting sensors under and the variance of the MMSE estimate under . Thereafter, the FC compares the MMSE estimate to the expected number of transmitting sensors under . The square of the difference is normalized by the variance of the MMSE estimate under . If the test statistic is within , the FC declares ; otherwise, the FC declares .
For the Wald test fusion rule as shown in equation (32), the FC computes the ML estimates and the variance , for . Thereafter, the FC puts them into the test statistic and compares the result with the decision threshold to make a final decision.
Performance metrics
Asymptotic distribution
Asymptotically, for large and , the test statistics of the GLRT, Rao test, and Wald test fusion rules have the same distribution.16 Specifically, the distribution of the test statistics in equations (7), (8), and (9) can be expressed as
where “a” denotes an asymptotic distribution, denotes a Chi-square PDF with degree of freedom, and denotes a noncentral Chi-square PDF with degree of freedom and noncentrality parameter . The noncentrality parameters is16
where the vector and is a Fisher information matrix shown in the proof in Proposition 1. Asymptotic performance of the fusion rules can be measured as a probability of detection and a probability of false alarm (PF). These probabilities can be obtained from and .
Similarly, the test statistics in equations (30), (31), and (32) have the same asymptotic distribution
where the noncentrality parameters is
The noncentrality parameter is computed from the same formula shown in equation (39) where the Fisher information matrix is shown in the proof in Proposition 2. The probability of detection (PD) and the probability of false alarm (PF) are obtained from and , respectively.
Both test statistics and have the same distribution under , that is, . Therefore, given the same threshold values and , the fusion rules experience the same probability of false alarm . On the contrary, the test statistics and occupy different distributions under , which are parameterized by the noncentrality parameters and as shown in equations (39) and (41), respectively. Consequently, the fusion rules in the TDMA-based distributed detection and the fusion rules in the slotted-Aloha-based distributed detection achieve different probabilities of detection . A higher noncentrality parameter results in a better . Therefore, we can determine when one fusion rule outperforms the other by comparing the noncentrality parameters with . If, in a scenario, , the TDMA-based distributed detection outperforms the slotted-Aloha-based distributed detection and vice versa.
Energy consumption
Since sensors are battery-powered devices, spending energy efficiently will extend their lifetime. In this article, we consider that energy consumption is mainly from sensing the event and transmitting a local decision.17 We model the energy consumption in this way such that we can see a trade-off between sensing and transmitting. We assume that is the energy spent per one sensing and is the energy spent per one transmission (generally, ).
TDMA-based distributed detection
At the beginning of the mth frame, the sensors who are assigned their time slots in this frame will sense the event of interest. The energy consumption for sensing will be equal to . Among sensors, there will be sensors who make local decision and, then, transmit their decisions at the allocated time slots. The number of transmitting sensors is a Binomial random variable: . The energy spent on transmission will be equal to . The energy consumption spent in the mth frame is . At the end of the collection time, the total energy that has been spent will be equal to . The conditional expectation of under is . Finally, the average energy consumption per a decision-making, which is computed from , where , is equal to
Slotted-Aloha-based distributed detection
At the beginning of the mth frame, all sensors will sense the event of interest. The energy consumption for sensing will be equal to . Among sensors, there will be sensors who make local decision and, then, transmit their decisions to the FC by using the slotted-Aloha protocol described in section “Collision-aware fusion rules of the slotted-Aloha-based distributed detection.” The number of transmitting sensors is a Binomial random variable: . The energy spent on transmission will be equal to . The energy consumption spent in the mth frame will be equal to . At the end of the collection time, the total energy that has been spent will be equal to . The conditional expectation of under is . Finally, the average energy consumption per a decision-making, which is computed from , where , is equal to
Basically, as shown in equations (42) and (43), if the same set of censoring thresholds is used for both schemes, for , the slotted-Aloha-based distributed detection will consume more energy than that of the TDMA-based distributed detection.
Simulation and numerical results
In this section, we present both simulation and numerical results on the performances of the proposed fusion rules. For simplicity, we assume that the noisy observation is modeled as an invariant and independent Gaussian shift-in-mean distribution. Specifically, the observation sensed by each sensor node at the beginning of the mth frame, for , is governed by
where is the event signal’s strength and is the noise variance. The performances of the fusion rules are parameterized by a set of censoring thresholds , the global decision thresholds and , the number of sensor nodes , the number of time slots in the frame , the number of frames in the collection time , and the channel sensing error . The effects of these parameters on the fusion-rule performances will be studied subsequently. In addition, the performances between the TDMA-based distributed detection and the slotted-Aloha-based distributed detection will be compared.
Simulation
The purpose of simulation here is to study the performances of the proposed fusion rules under a finite number of sensor nodes and a finite number of time slots . As opposed to the asymptotical analysis in the next subsection, we will see how each fusion rule performs. The effects of the censoring thresholds on receiver operating characteristic (ROC) curves of the proposed fusion rules obtained from Monte Carlo simulation are also investigated. The censoring thresholds control the number of sensor nodes transmitting their decisions in each frame. Higher censoring threshold will lower the number of transmitting sensor nodes under both and for the hypothesis testing model in equation (44). Subsequently, the censoring threshold will affect the numbers of idle time slots, successful time slots, and collision time slots (in the mth frame) seen by the FC and applied to the fusion rules to make global decisions.
Figure 2 shows ROC curves for the TDMA-based distributed detection where the GLRT, Rao test, and Wald test fusion rules (as derived in Proposition 1) are applied. For simplicity, the censoring thresholds are set up such that . The other parameters are given as shown in the figure caption. When , for all , as shown in Figure 2(a), the Rao test and Wald test fusion rules provide almost the same performance and significantly outperform that of the GLRT fusion rule. When , for all , as shown in Figure 2(b), the GLRT fusion rule performs slightly better than that of the Rao test fusion rule and far better than that of the Wald test fusion rule. In addition, we see that both GLRT and Rao test fusion rules prefer to while the Wald test fusion rule prefers to . A set of optimal thresholds for the TDMA-based distributed detection will be evaluated asymptotically in subsection “Optimal censoring thresholds.”
TDMA-based distributed detection. The effects of the parameters on the ROC curves of the TDMA-based distributed detection using the GLRT, Rao test, and Wald test fusion rules. The other parameters are set up as follows: , , , , , and . (a) The ROC curves when for all . (b) The ROC curves when for all .
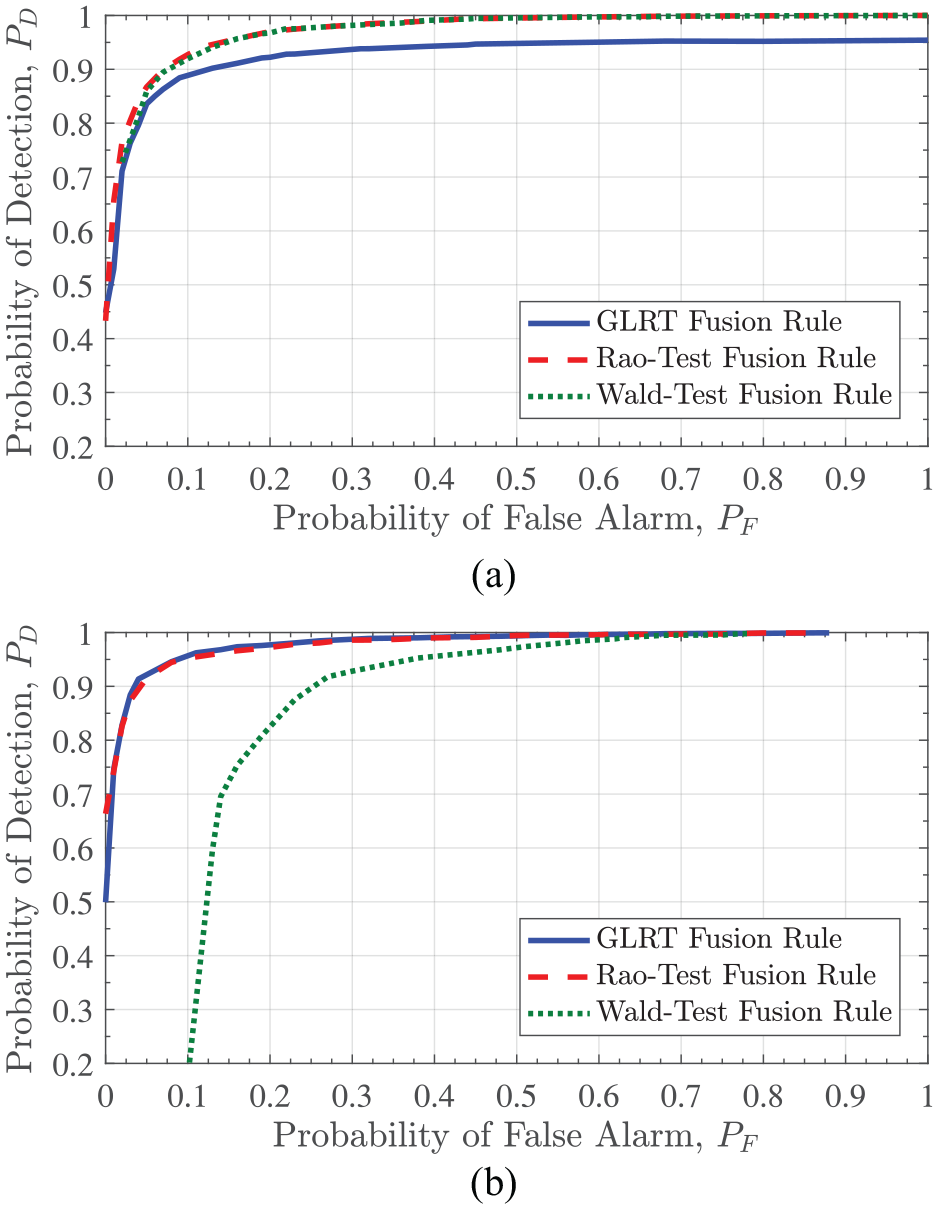
Figure 3 shows ROC curves for the slotted-Aloha-based distributed detection where the GLRT, Rao test, and Wald test fusion rules (as derived in Proposition 2) are applied. For simplicity, the censoring thresholds are set up such that . The other parameters are given as shown in the figure caption. When , for all , as shown in Figure 3(a), the GLRT fusion rule provides a better performance than those of the Rao test and Wald test fusion rules. When , for all , as shown in Figure 3(b), the Rao test fusion rule performs better than that of the GLRT fusion rule and far better than that of the Wald test fusion rule. Similar to the TDMA-based distributed detection, we see that both GLRT and Rao test fusion rules prefer to while the Wald test fusion rule prefers to . A set of optimal thresholds for the slotted-Aloha-based distributed detection will be evaluated asymptotically in subsection “Optimal censoring thresholds.”
Slotted-Aloha-based distributed detection. The effects of the parameters on the ROC curves of the slotted-Aloha-based distributed detection using the GLRT, Rao test, and Wald test fusion rules. The other parameters are set up as follows: , , , , , and . (a) The ROC curves when for all . (b) The ROC curves when for all .
Asymptotic performance
In this section, we investigate the asymptotic performance of the TDMA-based distributed detection and the slotted-Aloha-based distributed detection by using equations (38) and (40) under various scenarios. Recall that the performance of the GLRT, Rao test, and Wald test fusion rules are asymptotically identical as shown in subsection “Asymptotic distribution.”
ROC
Figure 4 compares ROC curves of the TDMA-based distributed detection and the slotted-Aloha-based distributed detection. The censoring thresholds are set up such that . The other parameters are given as shown in the figure caption. Figure 4(a) shows the ROC curves when , for all , while Figure 4(b) shows the ROC curves when , for all . Note that the performance of the TDMA-based distributed detection does not depend on since, in each frame, only sensor nodes corresponding to time slots will make their local decisions. We see that the censoring threshold significantly affects the performances of both schemes. When , the TDMA-based distributed detection offers a better performance. On the contrary, when , the slotted-Aloha-based distributed detection offers a better performance. While the performance of the TDMA-based distributed detection is independent of , the performance of the slotted-Aloha-based distributed detection can be improved by increasing . The effects of , , and on the performances of both schemes will be studied in subsection “Performance comparisons.”
The effects of the parameters and on the ROC curves of the TDMA-based distributed detection and the slotted-Aloha-based distributed detection. The other parameters are set up as follows: , , , and . (a) The ROC curves when for all . (b) The ROC curves when for all .
Optimal censoring thresholds
In this section, we show and study the censoring thresholds that optimize the performance of each scheme. According to subsection “Asymptotic distribution,” the optimal censoring thresholds are those who maximize the probability of detection . Specifically, the optimal thresholds for the TDMA-based distributed detection are those who maximize equation (39) while the optimal thresholds for the slotted-Aloha-based distributed detection are those who maximize equation (41). Since both equations (39) and (41) are functions of (via ), to find and study these optimal thresholds, we assume that the event’s signal strength is given.
According to the assumption that, at each frame, sensor nodes sense the noisy observation from the invariant Gaussian distribution specified in equation (44) and for simplicity, we limit our searching for the optimal thresholds to a set of identical thresholds , where , that optimize .
Table 1 shows the censoring thresholds for the TDMA-based distributed detection when , , , , and . Note that the performance of the TDMA-based distributed detection is independent of . In addition, the average numbers of idle time slots and successful time slots , for , are included. As shown in the table, the optimal thresholds result in a lot of number of idle time slots under and a lot of successful time slots under .
The censoring threshold maximizing for the TDMA-based distributed detection, where , , , , and .
−
TDMA: time division multiple access.
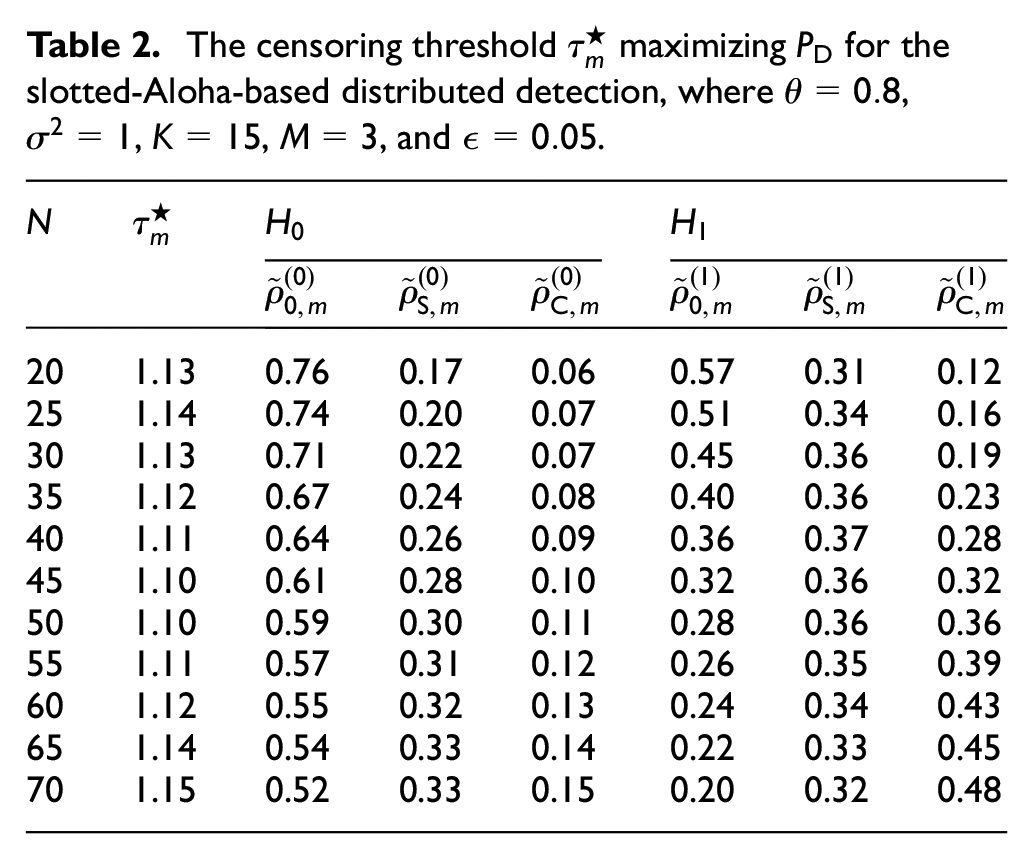
Table 2 shows the censoring thresholds for the slotted-Aloha-based distributed detection with various , when , , , , and . In addition, we are also interested in the network traffic of this scheme which exploits the slotted-Aloha protocol as the medium control access. Unlike data network,23 the performance matric here is . It would be very interesting that how the corresponding network traffic according to the optimal thresholds behaves. Therefore, we show the probability that a time slot will be an idle time slot , the probability that a time slot will be a successful time slot , and the probability that a time slot will be a collision time slot under . As a result, we can see that, by applying the optimal thresholds , the slotted-Aloha-based distributed detection does not attempt to maximize the probability of successful time slots . On the contrary, to achieve the maximum , it might experience a lot of idle time slots (high ) and/or collision time slots (high ).
The censoring threshold maximizing for the slotted-Aloha-based distributed detection, where , , , , and .
20
1.13
0.76
0.17
0.06
0.57
0.31
0.12
25
1.14
0.74
0.20
0.07
0.51
0.34
0.16
30
1.13
0.71
0.22
0.07
0.45
0.36
0.19
35
1.12
0.67
0.24
0.08
0.40
0.36
0.23
40
1.11
0.64
0.26
0.09
0.36
0.37
0.28
45
1.10
0.61
0.28
0.10
0.32
0.36
0.32
50
1.10
0.59
0.30
0.11
0.28
0.36
0.36
55
1.11
0.57
0.31
0.12
0.26
0.35
0.39
60
1.12
0.55
0.32
0.13
0.24
0.34
0.43
65
1.14
0.54
0.33
0.14
0.22
0.33
0.45
70
1.15
0.52
0.33
0.15
0.20
0.32
0.48
Performance comparisons
Figure 5 compares the probabilities and energy consumption of the TDMA-based distributed detection and slotted-Aloha-based distributed detection as varying , , and for P0 = P1 = 0.5. Recall that energy consumption values of these schemes are obtained from equations (42) and (43), where we assume that energy unit and energy unit. The optimal thresholds are applied. The other parameters are set up as shown in the sub-figures’ captions. Figure 5(a) demonstrates that, for a given collection time (or delay), , the slotted-Aloha-based distributed detection can outperform the TDMA-based distributed detection by increasing which results in higher energy consumption. On the contrary, Figure 5(b) shows the and energy consumption versus for . We see that the probability of the TDMA-based distributed detection can be improved by increasing the collection time , which results in more energy consumption and a longer (decision) delay. Figure 5(c) shows that the probability of the slotted-Aloha-based distributed detection is quite sensitive to the channel error . Overall, from the scenarios studied in this subsection, we can see that the slotted-Aloha-based distributed detection spends more energy than the TDMA-based distributed detection does.
The effects of the key parameters on the probabilities and energy consumption of the TDMA-based distributed detection and the slotted-Aloha-based distributed detection. The optimal censoring thresholds are applied. (a) The effect of on the probabilities and the energy consumption of both schemes. The other parameters are set up as follows: , , , , , , , and . (b) The effect of on the probabilities and the energy consumption of both schemes. The other parameters are set up as follows: , , , , , , , and . (c) The effect of on the probabilities and the energy consumption of both schemes. The other parameters are set up as follows: , , , , , , , and .
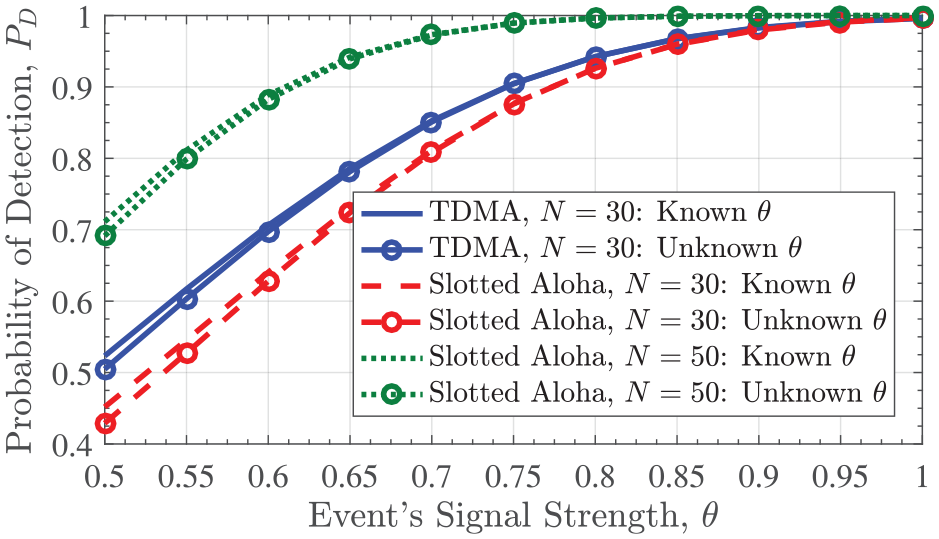
Performance sensitivity to the unknown signal strength : Figure 6 shows the effects of the unknown signal strength to the probabilities of both schemes. For each scheme, we compare the probabilities of the known case (where the thresholds corresponding to that are applied) and the unknown case (where the thresholds computed from assuming that are applied). We see that these two schemes are slightly deteriorated by the unknown .
The effect of unknown on the probability of both schemes. The other parameters are set up as follows: , , , , and .
Conclusion
The composite hypothesis testing problem in time-bandwidth-constrained distributed detection has been considered. We have derived the GLRT, Rao test, and Wald test fusion rules for the TDMA-based distributed detection and the slotted-Aloha-based distributed detection. The fusion rules for the TDMA-based distributed detection are simple and apply the numbers of idle and successful time slots to compute a final decision. On the contrary, the fusion rules for the slotted-Aloha-based distributed detection are complicated and apply the numbers of idle, successful, and collision time slots to make a final decision. Their asymptotic performance and energy consumption are obtained. The numerical results have shown the tradeoffs among the number of sensor nodes, time delay, and energy consumption of these two schemes. To improve the performance of the TDMA-based distributed detection, given a number of sensor nodes, we need to increase the collection time which results in a longer delay in the final decision-making. On the contrary, to improve the performance of the slotted-Aloha-based distributed detection, given a delay, we can add more sensor nodes into the monitored area which results in requiring higher energy consumption. Therefore, for a given time delay, the slotted-Aloha-based distributed detection can outperform the TDMA-based distributed detection by increasing the number of sensor nodes but higher energy consumption might be needed in exchange. This work can be used for distributed detection whose model of is difficult to be obtained and time delay is critical such as environment monitoring in a large area.
In this article, we have derived a set of fusion rules for fixed-sample-size distributed detection whose sensor nodes send their decisions over a shared collision channel. The following are possible extensions of this work. Designing and comparing sequential fusion rules for composite hypothesis testing of the TDMA-based distributed detection and the slotted-Aloha-based distributed detection would be interesting. Another extension can focus on finding fusion rules when sensor nodes send their decisions over a different channel model such as multipacket reception.
Footnotes
Acknowledgements
The author thanks the associate editor and the anonymous reviewers for comments and suggestions that contributed to improve the quality of this article.
Handling Editor: Janos Botzheim
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Seksan Laitrakun
References
1.
ViswanathanRVarshneyPK. Distributed detection with multiple sensors: part I–fundamentals. Proc IEEE1997; 85(1): 54–63.
2.
OrtnerMNehoraiA. A sequential detector for biochemical release in realistic environments. IEEE T Signal Process2007; 55(8): 4173–4182.
3.
PahlajaniCDPoulakakisITannerHG. Networked decision making for Poisson processes with applications to nuclear detection. IEEE T Automat Contr2014; 59(1): 193–198.
4.
ZouQZhengSSayedAH. Cooperative sensing via sequential detection. IEEE T Signal Process2010; 58(12): 6266–6283.
5.
MalekiSLeusG. Censored truncated sequential spectrum sensing for cognitive radio networks. IEEE J Sel Areas Commun2013; 31(3): 364–378.
6.
ZhangXLiuXSamaniH, et al. Cooperative spectrum sensing in cognitive wireless sensor networks. Int J Distrib Sens N. Epub ahead of print 16August2015. DOI: 10.1155/2015/170695.
7.
ChenBJiangRKasetkasemT, et al. Channel aware decision fusion in wireless sensor networks. IEEE T Signal Process2004; 52(12): 3454–3458.
8.
JiangRChenB. Fusion of censored decisions in wireless sensor networks. IEEE T Wirel Commun2005; 4(6): 2668–2673.
9.
NiuRChenBVarshneyPK. Fusion of decisions transmitted over Rayleigh fading channels in wireless sensor networks. IEEE T Signal Process2006; 54(3): 1018–1027.
10.
LiFEvansJSDeyS. Decision fusion over noncoherent fading multiaccess channels. IEEE T Signal Process2011; 59(9): 4367–4380.
11.
Salvo RossiPCiuonzoDKansanenK, et al. Performance analysis of energy detection for MIMO decision fusion in wireless sensor networks over arbitrary fading channels. IEEE T Wirel Commun2016; 15(11): 7794–7806.
12.
LeiASchoberR. Multiple-symbol differential decision fusion for mobile wireless sensor networks. IEEE T Wirel Commun2010; 9(2): 778–790.
13.
SunXCoyleEJ. Low-complexity algorithms for event detection in wireless sensor networks. IEEE J Sel Areas Commun2010; 28(7): 1138–1148.
14.
LuoJNiJLiuZ. Distributed decision fusion under nonideal communication channels with adaptive topology. Inform Fusion2019; 45: 190–201.
15.
CiuonzoDSalvo RossiPDeyS. Massive MIMO channel-aware decision fusion. IEEE T Signal Process2015; 63(3): 604–619.
16.
KaySM. Fundamentals of statistical signal processing: detection theory. Upper Saddle River, NJ: Prentice Hall, 1993.
17.
AppadwedulaSVeeravalliVVJonesDL. Energy-efficient detection in sensor networks. IEEE J Sel Areas Commun2005; 23(4): 693–702.
18.
RagoCWillettPBar-ShalomY. Censoring sensors: a low-communication-rate scheme for distributed detection. IEEE T Aerosp Electron Syst1996; 32(2): 554–568.
19.
ChengVWangTY. Performance analysis of distributed decision fusion using a multilevel censoring scheme in wireless sensor networks. IEEE T Veh Technol2012; 61(4): 1610–1619.
20.
BlumRSSadlerBM. Energy efficient signal detection in sensor networks using ordered transmissions. IEEE T Signal Process2008; 56(7): 3229–3235.
21.
SrirangaNNaganandaKGBlumRS. Shared channel ordered transmissions for energy-efficient distributed signal detection. IEEE Commun Let2019; 23(1): 96–99.
22.
BergerCRGuerrieroMZhouS, et al. PAC vs. MAC for decentralized detection using noncoherent modulation. IEEE T Signal Process2009; 57(9): 3562–3575.
23.
BertsekasDGallagerR. Data networks. 2nd ed.Upper Saddle River, NJ: Prentice Hall, 1992.
24.
ChangTYHsuTCHongYWP. Exploiting data-dependent transmission control and MAC timing information for distributed detection in sensor networks. IEEE T Signal Process2010; 58(3): 1369–1382.
25.
XuDYaoY. Contention-based transmission for decentralized detection. IEEE T Wirel Commun2012; 11(4): 1334–1342.
26.
XuDYaoY. Splitting tree algorithm for decentralized detection in sensor networks. IEEE T Wirel Commun2013; 12(12): 6024–6033.
27.
LaitrakunSCoyleEJ. Reliability-based splitting algorithms for time-constrained distributed detection in random-access channels. IEEE T Signal Process2014; 62(21): 5536–5551.
28.
WhippsGTErtinEMosesRL. Distributed detection of binary with collisions in a large, random network. IEEE T Signal Process2015; 63(6): 1477–1489.
29.
CiuonzoDPapaGRomanoG, et al. One-bit decentralized detection with a Rao test for multisensor fusion. IEEE T Signal Process Let2013; 20(9): 861–864.
30.
GaoFLiliFGLiH, et al. Quantizer design for distributed GLRT detection of weak signals in wireless sensor networks. IEEE T Wirel Commun2015; 14(4): 2032–2042.
31.
CiuonzoDDe MaioASalvo RossiP. A system framework for composite hypothesis testing of independent Bernoulli trials. IEEE Signal Process Let2015; 22(9): 1249–1253.
32.
CiuonzoDSalvo RossiPWillettP. Generalized Rao test for decentralized detection of an uncooperative target. IEEE Signal Process Let2017; 24(5): 678–682.
33.
CiuonzoDSalvo RossiP. Distributed detection of a non-cooperative target via generalized locally-optimum approaches. Inform Fusion2017; 36: 261–274.
34.
ChengXCiuonzoDSalvo RossiP. Multi-bit decentralized detection through fusing smart & dumb sensors based on Rao test. IEEE T Aerosp Electron Syst2020; 56(2): 1391–1405.
35.
LaitrakunSCoyleEJ. Collision-aware sequential distributed detection with sensor censoring in random-access WSNs. In: 12th international conference on electrical engineering/electronics, computer, telecommunications and information technology (ECTI-CON), Hua Hin, Thailand, 24–27 June 2015, pp.1–6. New York: IEEE.
36.
LaitrakunSCoyleEJ. Collision-aware composite hypothesis testing in random-access WSNs with sensor censoring. In: International computer science and engineering conference (ICSEC), Chiang Mai, Thailand, 23–26 November 2015, pp.1–6. New York: IEEE.
37.
LaitrakunS. Rao-test fusion rules of uncensored decisions transmitted over a collision channel. In: 21st international symposium on wireless personal multimedia communications (WPMC), Chiang Rai, Thailand, 25–28 November 2018, pp.495–500. New York: IEEE.