
Abstract
Multi-node cooperative sensing can effectively improve the performance of spectrum sensing. Multi-node cooperation will generate a large number of local data, and each node will send its own sensing data to the fusion center. The fusion center will fuse the local sensing results and make a global decision. Therefore, the more nodes, the more data, when the number of nodes is large, the global decision will be delayed. In order to achieve the real-time spectrum sensing, the fusion center needs to quickly fuse the data of each node. In this article, a fast algorithm of big data fusion is proposed to improve the real-time performance of the global decision. The algorithm improves the computing speed by reducing repeated computation. The reinforcement learning mechanism is used to mark the processed data. When the same environment parameter appears, the fusion center can directly call the nodes under the parameter environment, without having to conduct the sensing operation again. This greatly reduces the amount of data processed and improves the data processing efficiency of the fusion center. Experimental results show that the algorithm in this article can reduce the computation time while improving the sensing performance.
Introduction
Developments in wireless communication technology have increased the need for spectrum resources, which are currently limited.1,2 To address this problem, cognitive radio networks have been proposed to improve existing spectrum resources.3,4 In this context, spectrum sensing technology is the basic link between cognitive radio networks. 5
Sensing nodes need to quickly and accurately perform spectrum sensing in order to efficiently utilize the idle frequency band without interfering with the primary user. 6 This presents another issue; due to the impacts of path loss, shadow fading, and hidden terminals, it is difficult for a single sensor node to accurately detect the primary user’s status.7,8 Nevertheless, cooperative sensing can effectively overcome these impacts by fusing detection information from multiple nodes in different geographical locations. 9 In centralized cooperative sensing, there is a special data fusion center in the cognitive network. This collects local perception results from the nodes participating in cooperative perception, judges the current usage of authorized bands, and then broadcasts the decision results in the network or directly controls and schedules the perception nodes. 10 The local sensing result collection process will increase the communication overhead when a large number of nodes are participating.11,12 However, too many cooperative cognitive users (sensing nodes) will cause vast communication overhead. A proposed review method addressed this problem by examining the observed values of perceived nodes and only allowing nodes containing sufficient information to send their decision values (0 or 1) to the fusion center. 13 This method reduces communication overhead but also reduces sensing performance. Aiming at the excessive overhead created by equal gain fusion,14,15 a double threshold method is used to perform cooperative spectrum sensing in which each node adopts double threshold detection and sends the detected value directly to the fusion center, which then makes the judgment. Combined with the judgments of each node and its own judgment, the fusion center makes two judgments to determine whether the primary user exists. This employs a combination of soft and hard fusion methods, but performs two operations in the fusion center, thus increasing computational power. Furthermore, a hierarchical cooperative spectrum detection method has been proposed to solve the problem of excessive cooperative sensing overhead.16,17 Here, when nodal observation values are between two thresholds, the region between these two thresholds is evenly divided into four parts; four different regions are thus quantized by 2 bits. The sensing nodes then send 2 bits of information to the fusion center. When compared with the equal gain fusion method, this reduces communication overhead. However, the sensing performance of hard fusion decreases. 18
Spectrum sensing performance directly affects the throughput of cognitive users, 19 and multi-node cooperative spectrum sensing is a common method to improve the performance of spectrum sensing. 20 However, when multi-node participates in cooperative sensing, the sensing data will increase greatly, and the fusion center cannot process a large number of data in time, which will cause delayed decision, which will affect the security of the main user or the throughput of cognitive users. In order to make a decision in time, a large number of data in the fusion center needs to be processed quickly, which requires the selection of some node data to reduce the number of processed data. Therefore, in order to achieve the real-time spectrum sensing, the fusion center needs to quickly fuse the data of each node. In this article, a fast algorithm of big data fusion is proposed to improve the real-time performance of the global decision. The algorithm improves the computing speed by reducing repeated computation. The reinforcement learning mechanism is used to mark the processed data. When the same environment parameter appears, the fusion center can directly call the nodes under the parameter environment, without having to conduct the sensing operation again. This greatly reduces the amount of data processed and improves the data processing efficiency of the fusion center. Experimental results show that the algorithm in this article can reduce the computation time while improving the perceived performance.
System model
This study designed an analog cognitive radio system consisting of a primary user (PU) and 16 nodes (cognitive users). 21 Each node communicates with the fusion center through a channel, while the fusion center fuses information from each node to determine whether the primary user channel is idle. The system model is illustrated in Figure 1.

Simulation scenario for spectrum sensing.
Derivation of the optimum local detection threshold
For spectrum sensing, every SU independently performs an energy detection process. The signal received by an SU is determined as follows 22

where

Assuming E is the average collected energy of an SU and it is expressed as follows 24

If each SU can make its local decision according to single threshold


where

Assuming the presence probability of a PU is

where

It is easy to obtain optimal threshold
Estimating the optimal threshold
If a sensing cycle sampling point is


where


If
Let

The estimation of optimal thresholds

Here, it should be noted that the conditions for the solution of equation (2) should be satisfied according to the following equation

Transform equation (15) type to the following

When the number of sampling points is
Adaptive double energy thresholds
To avoid error judgments due to SNR variations in a received end, lower threshold


Double threshold settings.
For weak PU signal detection, threshold


Here, equations (18) and (19) gives the following

Different from conventional double threshold settings, we introduced control parameter

According to equation (20),

When

Parameter
Quantization and coding based on adaptive double energy thresholds
We considered the cognitive radio network as shown in Figure 1. Here, each node communicates with the fusion center. This study assumed that the channel between the node and fusion center was perfect.
Calculating bode weights
Assume

where

Assigned weights and the cooperative spectrum sensing algorithm.
According to Figure 3, global sensing performance will change when the two nodal thresholds are altered. According to equation (24), both the weights of the SUs and global sensing performance will change when the two thresholds are altered. As such, it is highly important to select an optimal
Cooperative spectrum sensing based on quantization and coding
After an SU obtains weight and encodes weight
The fusion center will decode for

The decoding rules can thus be expressed as follows

where
The fusion center will use majority-rule fusion after completely decoding all data received from all SUs. The fusion expressed is as follows

where ℜ is the fusion result,

The code algorithm summarizes the coding-based cooperative spectrum sensing.

PU: primary user.
For the note code algorithm, the transmission of all SUs combines 1 bit sent and 3 bits sent. As such, the algorithm can improve sensing performance while reducing communication overhead.
Reinforcement learning based on the grid search algorithm
Grid search algorithm
A grid search can be used to obtain optimal
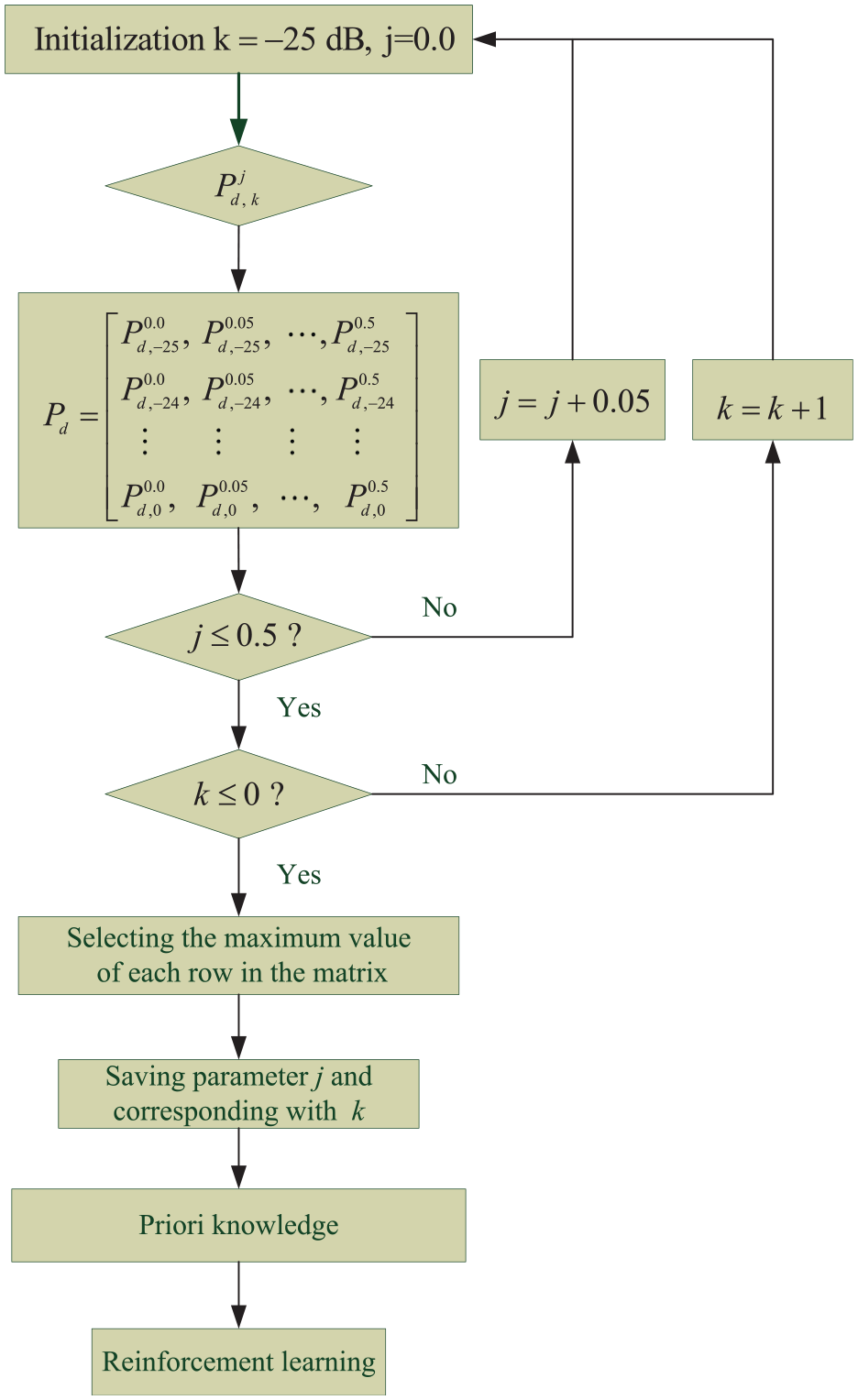
Flowchart showing the reinforcement learning scheme based on the grid search algorithm.
In Figure 4, k and j stand for SNR and control parameter
The grid search algorithm process is described as follows
1. When an SNR

where
2. When SNR

where
3. Under SNR
4.
5. When the real-time search has been finished, highest probability

where
6. End
Reinforcement learning based on the grid search algorithm
The learning process is as follows:
1. After the fusion center finishes executing the grid search, the obtained grid coordinates are represented as follows

The first column in matrix
2. The fusion center sends matrix
3. The cognitive user can memorize the data from matrix
4. In the case of a new radio environment, the fusion center must alter the range of
Experiments and evaluation
This study designed three groups of Monte Carlo simulation experiments to evaluate the performance of the cooperative spectrum sensing method, as follows: (1) a comparison of detection probabilities (
The simulation experiments set the PU signal to a BPSK, bandwidth to 100 kHz, and sensing duration to 100 ms.
30
The PU was placed in the center of a 1000 × 1,000 m square and surrounded by 16 evenly distributed sensing nodes. The simulation scenario is shown in Figure 1. The probability of setting the channel of PU occupancy was
Figure 5 illustrates a comparison of detection probabilities (
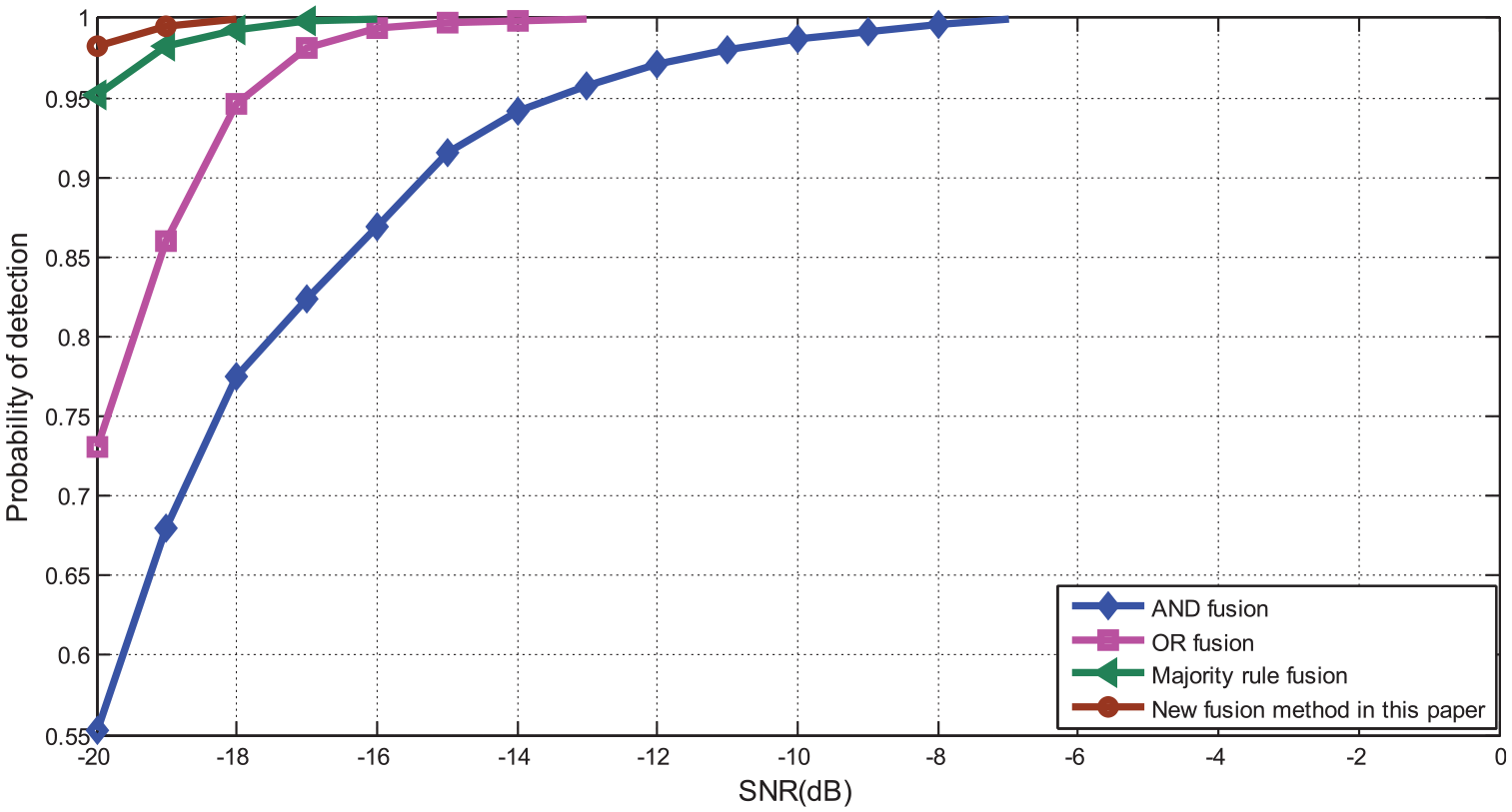
Comparison the traditional fusion methods and the new fusion method.
Figure 6 illustrates the comparison of probability of error (

A comparison of probability of error between the grid search algorithm and others.
Figure 7 shows a sensing speed comparison between reinforcement and non-reinforcement learning. As seen, reinforcement learning takes less sensing time than non-reinforcement learning under the same SNR conditions. This is because reinforcement learning can directly invoke detection thresholds in the same environment from the repository. If reinforcement learning is not used, then every spectrum sensing procedure requires a grid search algorithm to find the optimal threshold; this requires more sensing time. Sensing time decreases when SNR increases because the radio environment is simpler; with an increased signal-to-noise ratio, less information is stored and judgments are easier to make.

A sensing speed comparison between reinforcement and non-reinforcement learning.
In order to verification of fast fusion algorithm, compare the processing time of using fast fusion algorithm with that of not using fast fusion algorithm. The experiments are all under the same number of nodes. In order to highlight the advantages of the fast algorithm proposed in this article, observe the data processing time under different node numbers. Table 1 shows the processing time at different nodes. The processing environment is MATLAB 7.0, and the computer configuration is Intel (R) Core (TM) i5-8500 CPU at 3.00 GHz, RAM is 8 GB, and 64-bit operation system.
compare the processing time of using fast fusion algorithm with that of not using fast fusion algorithm.
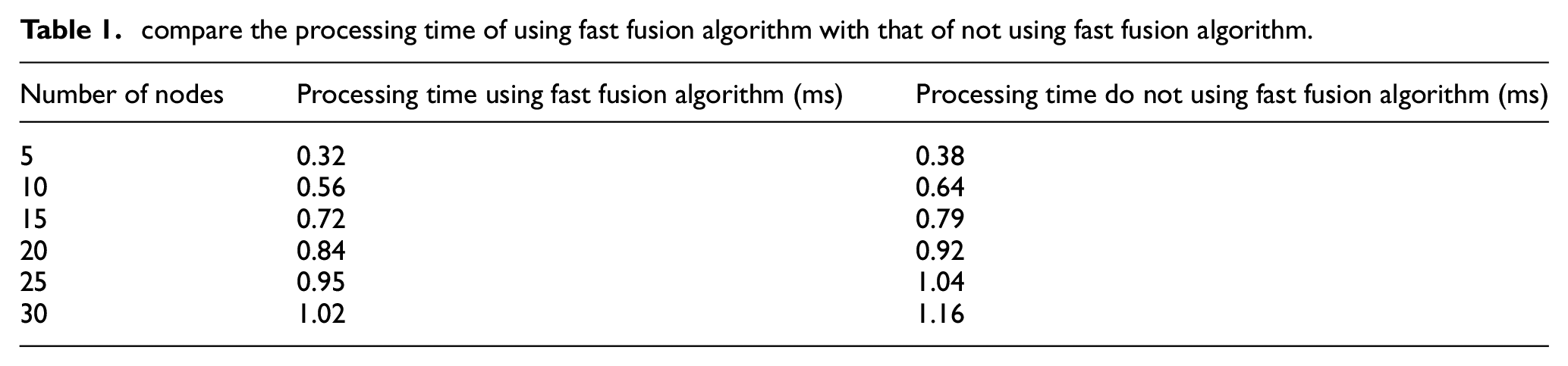
It can be seen from Table 1 that the fast algorithm used by the fusion center can effectively reduce the data processing time, and the average processing time can be reduced by 18%. When the number of nodes is more, the advantage of fast algorithm in dealing with big data is more obvious. When the number of nodes is more than 30, the time of fast algorithm in dealing with data is less than that of not using fast algorithm in dealing with 25 nodes, which can be the advantage of fast algorithm in this article.
Conclusion
This article studies a new perceptual data fusion algorithm, which can process the perceptual data of each node quickly without delay. In the cognitive radio network, different nodes have different perception data due to different geographical location, and the contribution of each node’s perception data to cooperative perception is also different. The fusion center uses reinforcement learning mechanism to select cooperation nodes by identifying the sensing performance of node, which can reduce the processing data to a certain extent, and enable the fusion center to process quickly the data sent by each node will not cause decision delay. This greatly improves the throughput of cognitive users while protecting the primary users. The experimental results show that the big data fast fusion algorithm in this article can effectively reduce the data processing time, The average processing time of using fast algorithm is 18% less than that of not using fast algorithm. When the number of nodes is more than 30, the time of fast algorithm in dealing with data is less than that of not using fast algorithm in dealing with 25 nodes, which can be the advantage of fast algorithm in this article. Furthermore, the algorithm in this article can reduce the processing time of node data and improve the sensing performance at the same time and increase the throughput of cognitive users, which is of great significance. However, at present, only the fast algorithm of big data is implemented in the fusion center, but not the energy-saving algorithm in the node itself, which is the follow-up research goal.
Footnotes
Handling Editor: Zheng Chang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article was supported by the Natural Science Foundation of Hunan Province, China (grant nos 2019JJ40097 and 2019JJ40096), the Key Research and Development Projects of Science and Technology Department of Hunan Province (grant no. 2017NK2390), the Research Foundation of Education Bureau of Hunan Province, China (grant no. 17B107), the Research Foundation of Science and Technology Bureau of Yongzhou City, China (nos 2019YZKJ08 and 2019YZKJ10), and the construct program of applied characteristic discipline at the Hunan University of Science and Engineering. The authors would like to thank Editage (![]() ) for English language editing.
) for English language editing.