
Abstract
In order to improve the control ability of the human body in the process of physical training, it is necessary to carry out the inverse simulation analysis of the physical training process and establish the process control model of the physical training. The complex problem of high-dimensional spatial motion planning involved in physical training is decomposed into a series of sub-problems in low-dimensional space, and the inertial attitude parameter fusion is carried out according to the position and pose state of the human body in the end of the workspace during the process of physical training. The design of sensor node and base station in the system can realize real-time collection of motion parameters of motion collectors. The multi-dimensional control of physical training process is carried out by fuzzy constraint and inverse integral control, and the attitude parameters of human body are adjusted by means of mechanical analysis model and inertial parameter analysis method. The simulation results show that the inversion simulation control has better convergence, higher control quality, and better inverse simulation performance in the process of physical training, which can effectively guide physical training and improve the effect of physical training.
Keywords
Introduction
With the rapid development of science and technology, people pay more and more attention to improving the quality of physical training by means of science and technology. In the past sports training process, the trainer used the less difficult video replay, and the analysis management way to explain the movement key points for the athlete is not intuitive and scientific, and lacks authenticity and interaction. It cannot meet the basic evaluation requirements of athletes’ movement norms and training results. However, the sports video can extract the training parameters of athletes, and can further analyze the training parameters by constructing models and observing the training movements, so as to obtain the results of the analysis of the pros and cons of the athletes’ training actions. 1 Wireless sensor network (WSN) is a distributed sensor network whose terminals are sensors that can sense and examine the outside world. Sensors in WSN communicate wirelessly, so network settings are flexible, device locations can be changed at any time, and wired or wireless connections can be made to the Internet. A multi-hop self-organizing network formed by wireless communication ensures athletes know their shortcomings intuitively and improve their quality of physical training according to the guidance of coaches. The movement of human body is a fuzzy control process in physical training. By simulating the posture of human body in physical training and combining with the method of mechanical analysis, the motion model of human body can be analyzed and the effect of physical training can be improved. It has important application value to study the simulation method of human body posture in physical training. 2
Traditionally, the research of human body attitude simulation control algorithm in sports training is mainly divided into path offset correction and path tracking control algorithm based on particle filter motion rigid trajectory decomposition and motion attitude simulation control algorithm based on genetic evolution algorithm. 3 In physical training based on genetic algorithm (GA), the human body control algorithm is commonly used. Wang and Shao 4 proposed a reinforcement learning algorithm based on neural network and applied to human trajectory correction and tracking control in physical training. And in the physical training of the human body to avoid obstacles in good practice, based on neural network reinforcement learning algorithm, it is combined with intelligent control structure applied in mobile sports training of human path and motion posture simulation control. The algorithm takes the human body in physical training as the model, which has certain guiding significance, but the model is not detailed enough and cannot completely reflect the characteristics of human body positioning and sports posture simulation in sports training, and the tracking control performance is not good. Zhang et al. 5 proposed an algorithm of simultaneous location of human body and map creation in sports training based on particle filter, and the pose model of human body and the creation of map of surrounding environment in sports training were obtained. The attitude tracking control of human body in physical training is realized, but the calculation accuracy of the algorithm is not high, the realization is more complex, and the application value is not good. 6 On the basis of designing human posture integral synovium control in physical training, multi-tree hybrid genetic evolution method was used to track human pose target in physical training, and human body trajectory control was carried out under multi-information fusion. The control accuracy is improved, but the convergence performance of the algorithm is not good, the local optimization ability and search speed need to be improved. 7 It is concluded that human posture is a multivariable nonlinear control system affected by small disturbance piecewise linear error in physical training. The traditional GA for motion attitude simulation control appears with steady tracking error in the boundary layer.
In view of the above problems, this article presents a physical training process control model based on inverse integral and fuzzy control. The complex problem of high-dimensional spatial motion planning involved in physical training is decomposed into a series of sub-problems in low-dimensional space, and the inertial attitude parameter fusion is carried out according to the position and pose state of the human body in the end of the workspace during the process of physical training. The multi-dimensional control of physical training process is carried out by fuzzy constraint and inverse integral control, and the attitude parameters of human body are adjusted by means of mechanical analysis model and inertial parameter analysis method. The inversion simulation control is realized in the process of physical training, and the effect of physical training is improved. Finally, the performance test is carried out through the simulation experiment, which shows the superior performance of improving the sports posture simulation and control under the method of this article.
Design of body posture environment model and analysis of constraint parameters in physical training
Human posture simulation model for physical training
In this article, we first simulate and construct the human posture simulation model in sports training, using bottom-up agent-based modeling method, and abstract the human posture spatial coordinate into the virtual world of genetic population.8,9 The human posture distributed structure model of physical training is shown in Figure 1.
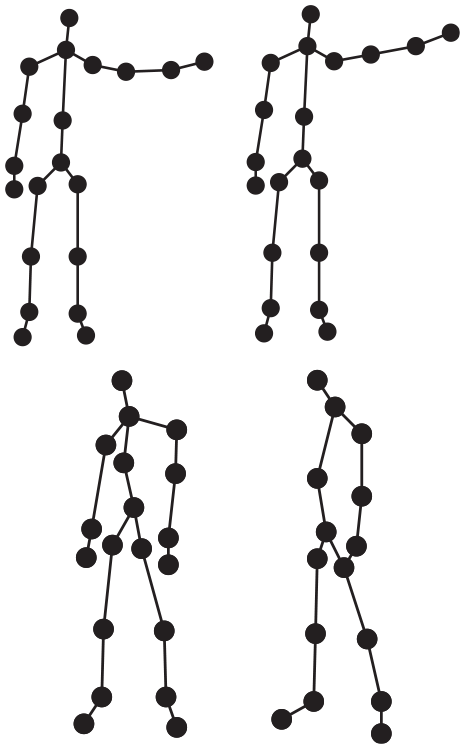
Distributed structure model of human posture in physical training.
In physical training, the movement space of human body can be expressed by a plane right angle coordinate system, which is organically connected with macro and micro. The optimization of human body’s path and the control of posture simulation in physical training are generally based on the multi-information fusion model of N decision variables. Several constraints of human posture simulation control in physical training are obtained as follows



Considering the nonlinear characteristics and uncertainty of the model, the two-position motion space of the human body in physical training is obtained

Every grid of human posture distribution in physical training can be described by point S; through the above description,9,10 the complex problem of high-dimensional spatial motion planning involved in physical training is decomposed into a series of sub-problems in low-dimensional space. According to the position and attitude status of the human body in the end of the workspace during physical training, the inertial attitude parameters are obtained as follows

where
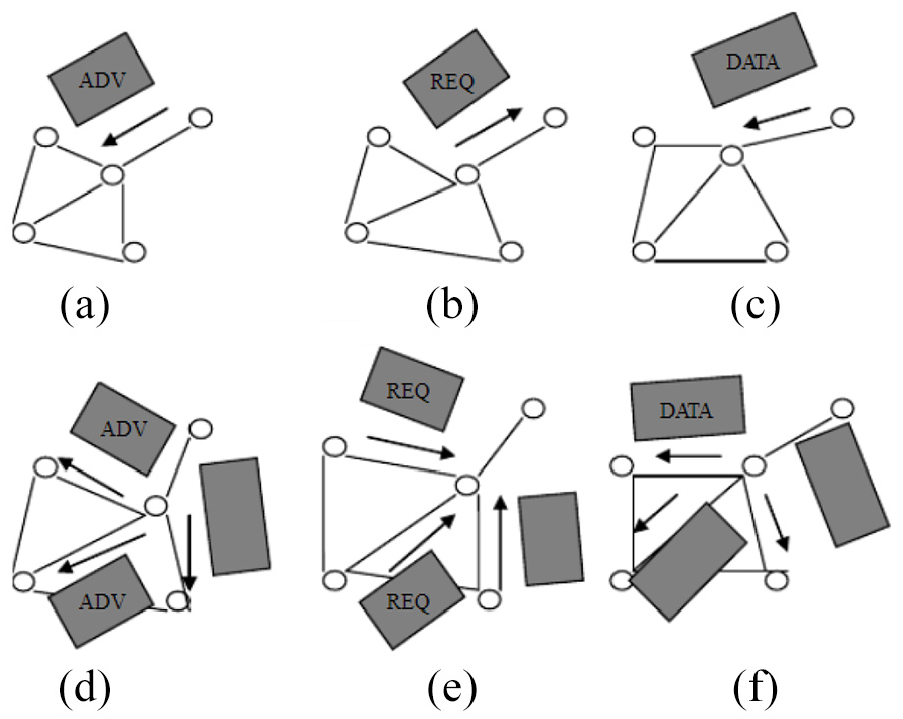
Working process of SPIN protocol.
Description of human body posture simulation control parameters in physical training
On the basis of constructing the grid structure model of human body motion space in physical training, this article analyzes the environment parameter model of human body posture simulation control in sports training, and according to the classical GA. In the process of sports posture simulation, the human body finds the target point and moves through the way of genetic evolution.13,14 The sensor collects a certain amount of external data, and it carries on the information characteristic analysis and the control. The process function of human body simulation control in physical training is obtained as follows

Suppose


where

where

By describing the parameters of human posture simulation control in sports training, this article provides a data basis for human posture simulation control in sports training.
Algorithm improvement design and implementation
Design of improved genetic control algorithm
According to the above analysis, it can be seen that the posture of human body is affected by the small disturbance piecewise linear error in sports training, and the human body attitude control system is a multivariable nonlinear control system in sports training. The traditional GA is used to simulate the motion and attitude control and the steady tracking error occurs in the boundary layer. In view of the disadvantages and defects of the traditional methods, 17 this article presents an improved GA based on the human body posture simulation control algorithm in sports training. First, three state-space equations of human body in the virtual world of genetic space in physical training are constructed as follows

where

The expression of confidence in moving position of human body in physical training is obtained as follows

According to Bayesian theorem, in order to satisfy the matching condition of GA and the error caused by parameter perturbation in physical training,
18
it is necessary to design an integral term of tracking error on the synovial surface of human posture in physical training. The genetic evolutionary switching control law of human posture in physical training can be written as

In physical training, human posture produces new individuals according to the quantum probability amplitude of quantum chromosomes and carries out quantum coding.
20
The measured data N are independent of their past measurements

Then

The control law of the body posture simulation control in the physical training is obtained as

The control error of the whole system is

It can be seen from the above analysis that the conventional sliding mode control can overcome the shortcomings of high error and no stability in motion trajectory control using the improved genetic evolutionary algorithm.
Retrieval integral control
According to the inertial attitude parameter fusion of the human body in the position and pose state of the end effect in the working space during physical training, the observation sequence of the human body in the course of physical training is

The total number of degrees of freedom
Given the initial configuration of the human body in the course of physical training, the initial posture of the human body
Simulation experiment and result analysis
In order to verify the application performance of this method in the process control of physical training, the simulation experiment is carried out, the model of human attitude parameter acquisition and characteristic analysis is constructed, and the signal acquisition sensor is designed. The route diagram by node resume is shown in Figure 3.
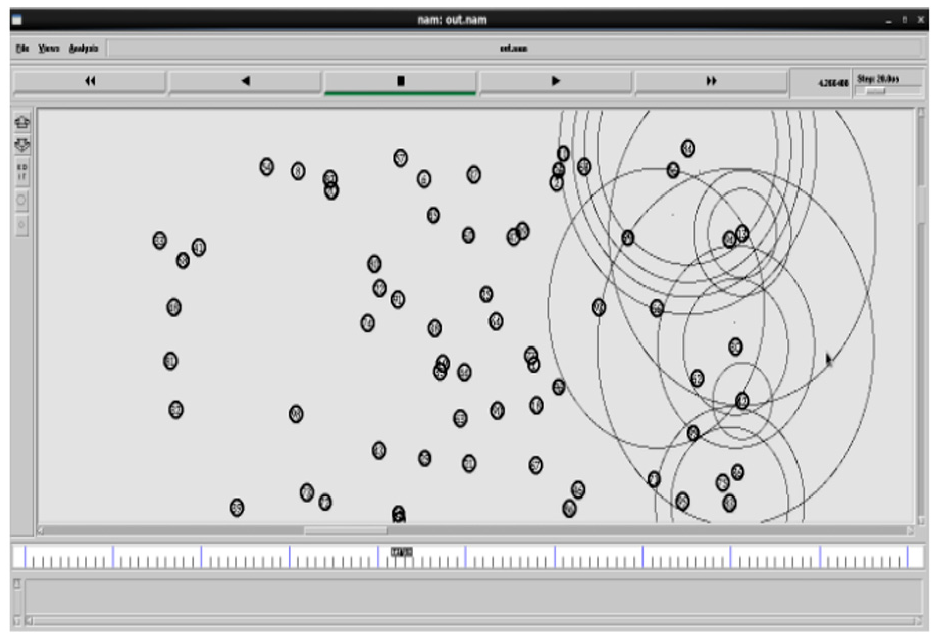
Route diagram by node resume.
Three data are obtained for each sensor. The simulation scene of human body motion space in physical training is in a two-dimensional (2D) plane of 300. The starting point of human attitude distribution coordinate is [20, 20], [250,250]. We adopt the international standard data set opportunity, Activity recognition data set, which includes a large number of acceleration and radio frequency identification (RFID) tags data, a total of 250 attributes. Two accelerometer data (six acceleration attributes and one state label attribute) are selected. According to the above simulation parameters, the analysis results of human posture simulation parameters in the course of physical training are shown in Figure 4. The number of nodes detected by the network is shown in Figure 5.

Simulated results of human posture during physical training.

Number of nodes detected by the network.
Figure 4 shows that the human posture performance of this method is better in the process of physical training, and the accuracy of inversion control in the process of physical training is tested by different methods. The comparison of control performance is shown in Figure 6, and the analysis in Figure 4 shows that this method has better convergence, higher control quality, and better inverse simulation performance in the process of physical training. The average energy consumption for transmitting a data message is shown in Figure 7.

Performance comparison of inversion simulation control.

Average energy consumption for transmitting a data message.
Conclusion
In this article, a physical training process control model based on inverse integral and fuzzy control is proposed. The complex problem of high-dimensional spatial motion planning involved in physical training is decomposed into a series of sub-problems in low-dimensional space, and the inertial attitude parameter fusion is carried out according to the position and pose state of the human body in the end of the workspace during the process of physical training. The multi-dimensional control of physical training process is carried out by fuzzy constraint and inverse integral control, and the attitude parameters of human body are adjusted by means of mechanical analysis model and inertial parameter analysis method. The inversion simulation control is realized in the process of physical training, and the effect of physical training is improved. The simulation results show that the inversion simulation control has better convergence, higher control quality, and better inverse simulation performance in the process of physical training, which can effectively guide physical training and improve the effect of physical training. This model has good application value in process control and posture simulation of sports training.
Footnotes
Handling Editor: Mohamed Elhoseny
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.