
Abstract
Gait analysis has become a hot spot in recent years, because it is proven that the status of a vast number of chronic diseases can be reflected by changes in gait. Furthermore, gait analysis can also help in improving the performance of athletes. Among the diverse gait analysis techniques, the piezoelectric-based insole technique has received broad attention due to its merits such as passive detection, high sensitivity, and low power consumption. However, the key coefficient of detecting plantar normal stress, the piezoelectric d33 coefficient, relies on the force frequency, which occupies a relatively wide bandwidth (1 Hz–1 kHz) during walking events. In order to get the frequency information of the signal, in this work, empirical mode decomposition is used to separate the gait signal into several intrinsic mode functions, and then the frequency information of each function is interpreted using the normalized Hilbert transform. In this way, the piezoelectric d33 coefficient is calibrated at every moment, obtaining higher accuracy (2.65% maximum improvement) in gait signal detection, promoting the development of gait analysis–based disease diagnosis and treatment.
Keywords
Introduction
Gait analysis has been widely used in recent years for sports training,1,2 chronic disease diagnosis,3,4 and emergency situation detection, 5 attracting worldwide attention and yielding both commercial and research products. 6 Conventional techniques for gait analysis include plate-based and insole-based architecture. Of these, the former provides higher detection accuracy and was the first generation of gait analysis. 7 However, users are constrained in a limited space due to the small area of the plate, which prohibits its use for long-term disease analysis in daily life. Hence, insole-based techniques were rapidly developed.
Most reported insole gait analysis techniques are capacitive-, resistive-, piezoresistive-, or piezoelectric-based methods.8–10 Capacitive-based techniques use flexible materials as insulating layers, which present significant deformations when suffering stress. Resistive techniques install strain gauges at desired locations to detect stress in the corresponding orientations. Piezoresistive architecture measures plantar stress information via piezoresistive effects,11–13 while piezoelectric architecture interprets plantar stress through analyzing the dipole movements. Among these methods, the first three require higher energy consumption than the last, owing to the nature of the active sensing mechanisms, which shorten the battery lifetime and limit their use for long-term monitoring. As a result, piezoelectric insole techniques have rapidly developed.
A variety of piezoelectric-based research outcomes have been reported in the literature.14–16 However, a key challenge for piezoelectric sensing—unstable force–voltage responsivity—has yet not been effectively addressed. This issue mainly originates from the dependency of the piezoelectric coefficient on frequency, indicating that when the same stress amplitude is applied to the piezoelectric device at different frequencies, the piezoelectric response varies due to the molecular structure. 14 For applications that do not require high force sensitivity, for example, touch panels, the shift of piezoelectric coefficient is easily tolerated. However, for medical diagnosis based on gait monitoring, the unstable responsivity may bring inaccurate information.
In this article, to address this very issue, a Hilbert–Huang transform (HHT)–based technique is proposed and implemented. Experimental results demonstrate an improved detection accuracy of 2.65% (maximum)/2.5% (average), advancing the area of piezoelectric-based in-shoe gait analysis.
This article is structured as follows. The “Literature review on piezoelectric-based insole techniques” section reviews piezoelectric-based insole techniques. The “Methodology” section explains the proposed algorithm. The “Testbed description” section describes the testbed. Experimental results and corresponding discussion are provided in the “Results and discussion” section. Finally, conclusions are offered in the “Conclusion” section.
Literature review on piezoelectric-based insole techniques
Plenty of piezoelectric-based insole architectures have been developed for gait analysis.7,17 Nevertheless, it is rare that commercialized products truly satisfy customers’ practical needs. This section briefly overviews existing work and then discusses their limitations.
Normal stress detection is supported in most, if not all, piezoelectric gait analysis prototypes. In Han et al., 18 two artificial intelligence (AI)-coated discrete polyvinylidene fluoride (PVDF) sensors were attached at the front and rear area of the plantar for recognizing different human motions, such as walking and running.
However, merely detecting normal stress cannot satisfy the need for disease diagnosis, for example, diabetic feet. Hence, in previous studies,19–21 shear stress sensing is added, and two main methods are used to assemble an in-shoe device. The first method constructs a multilayered structure, in which piezoelectric films are stacked with different polarization orientations. In Chen et al., 19 three sandwiched piezoelectric devices were positioned at the same point to detect three-axis stress. In Kärki et al., 20 four PVDF sensor elements were combined as a single device to detect normal and shear plantar stress. A differential amplifier-based circuitry was designed for improving detection accuracy, and averaged sensitivities at 12.6 mV/N for normal stress, and 223.9 and 55.2 mV/N for anterior–posterior and medical–lateral stress, respectively, were obtained. In contrast, in the second method, piezoelectric sensors for detecting different directions are arranged in the same layer, 21 hence decreasing the thickness of the device. However, because the piezoelectric elements are positioned in parallel, they cannot accurately represent stress information for the same location.
The above literature showcases different piezoelectric techniques used in insole devices for gait analysis. Nevertheless, a common issue is the stability of their piezoelectric coefficients, which are unfortunately not always solid in practical scenarios.14–16 To address this, the next section proposes a calibration method.
Methodology
The gait signal data were from the authors. The piezoelectric signal obtained contains a variety of frequency components, and each component has its own piezoelectric d33 coefficient corresponding to its instantaneous frequency. Thus, to accurately calibrate the piezoelectric d33 coefficient at a specific time, it is necessary to learn the corresponding instantaneous frequency,22–24 which is widely interpreted by the Hilbert transform–based algorithm in communication theories.25–32
The Hilbert transform is a method to generate a signal sh(t) that is orthogonal to the original signal s(t), expressed as

Phase information is given in equation (2), and the calculation of frequency is provided in equation (3)


where
Note that the signal needs to satisfy the Bedrosian theorem and Nuttall theorem before applying the Hilbert transform. In the Bedrosian theorem, the processed data should have a single frequency and a narrow band signal. However, in a practical case, amplitude modulation (AM) and frequency modulation (FM) coexist, and local changes in AM will affect the FM component. The Nuttall theorem is expressed in equation (4), which defines the error between the original signal xHT(t) from the Hilbert transform and the real original signal xOR(t)

in which

where
As stated above, in a conventional situation, AM and FM coexist due to the nonideal factors, for example, noise.33–36 Ignoring AM would result in a severe error in frequency interpretation. To address this, we adopted a normalized HHT, in which an empirical mode decomposition (EMD) algorithm31,37 divides the captured gait signal into several intrinsic mode functions (IMFs), the result being

where S(t) is the signal, IMFi is the intrinsic mode function component, and rK(t) is the error term which comes from the negligible low-frequency component. Then rK(t) is treated as a direct flow.
After that, empirical AM-FM decomposition is performed to separate each IMF into AM and FM components. The FM components are used to figure out the instantaneous frequency of each IMF, as well as its instantaneous amplitude. The flowchart for implementing the complete HHT-based algorithm for calibrating the piezoelectric d33 coefficient is illustrated in Figure 1, and a practical gait signal from a single piezoelectric sensor is given in Figure 2(a). In Figure 2(b), we list four IMFs of the gait signal. In fact, this signal can be divided into eight IMFs. The instantaneous frequency of IMF1 to IMF4 is given in Figure 2(c).

The algorithm to get the instantaneous frequency for the calibration of piezoelectric d33 coefficient.
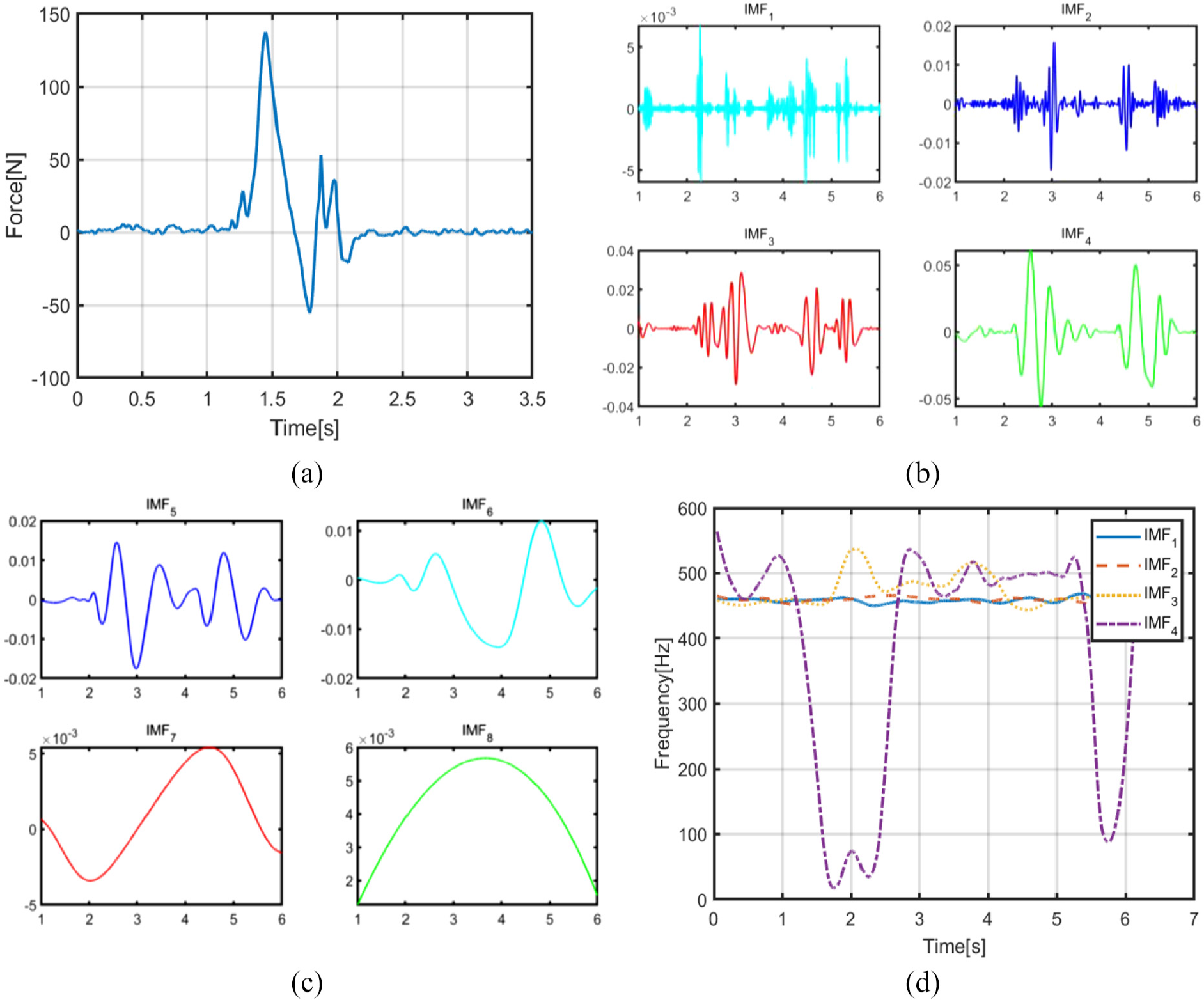
(a) The actual gait signal, (b) the separated IMFs (IMF1–IMF4) of the signal with empirical mode decomposition (EMD), (c) the separated IMFs (IMF5–IMF8) of the signal, and (d) the instantaneous frequency of IMF1 to IMF4 by the normalized Hilbert transform.
Based on the proposed algorithm above, the calibrated signal Sreal(t) can be expressed as a function of the directed obtained piezoelectric signal S(t)

where d33 is the piezoelectric d33 coefficient at 100 Hz (30 pC/N), which is used as a default value for sensing normal stress. With the amplitude and instantaneous frequency given from empirical AM-FM decomposition, we use equation (7) to calibrate the piezoelectric d33 coefficient.
Testbed description
A testbed was assembled to validate the proposed algorithm. PVDF films were selected as the functional material for their good mechanical and piezoelectric responses.38–42 In the constructed piezoelectric insole device, one PVDF film was settled as the intermedia layer with top (sensing) and bottom (ground) electrode layers on and underneath it. A PET/Cu/PVDF/Cu/PET41–48 structured device was integrated with the electrode substrate layers. At the sensing electrode layer, 36 round (radius = 5 mm) individual sensing locations (as shown in Figure 3) were patterned to reflect major gait information during walking.
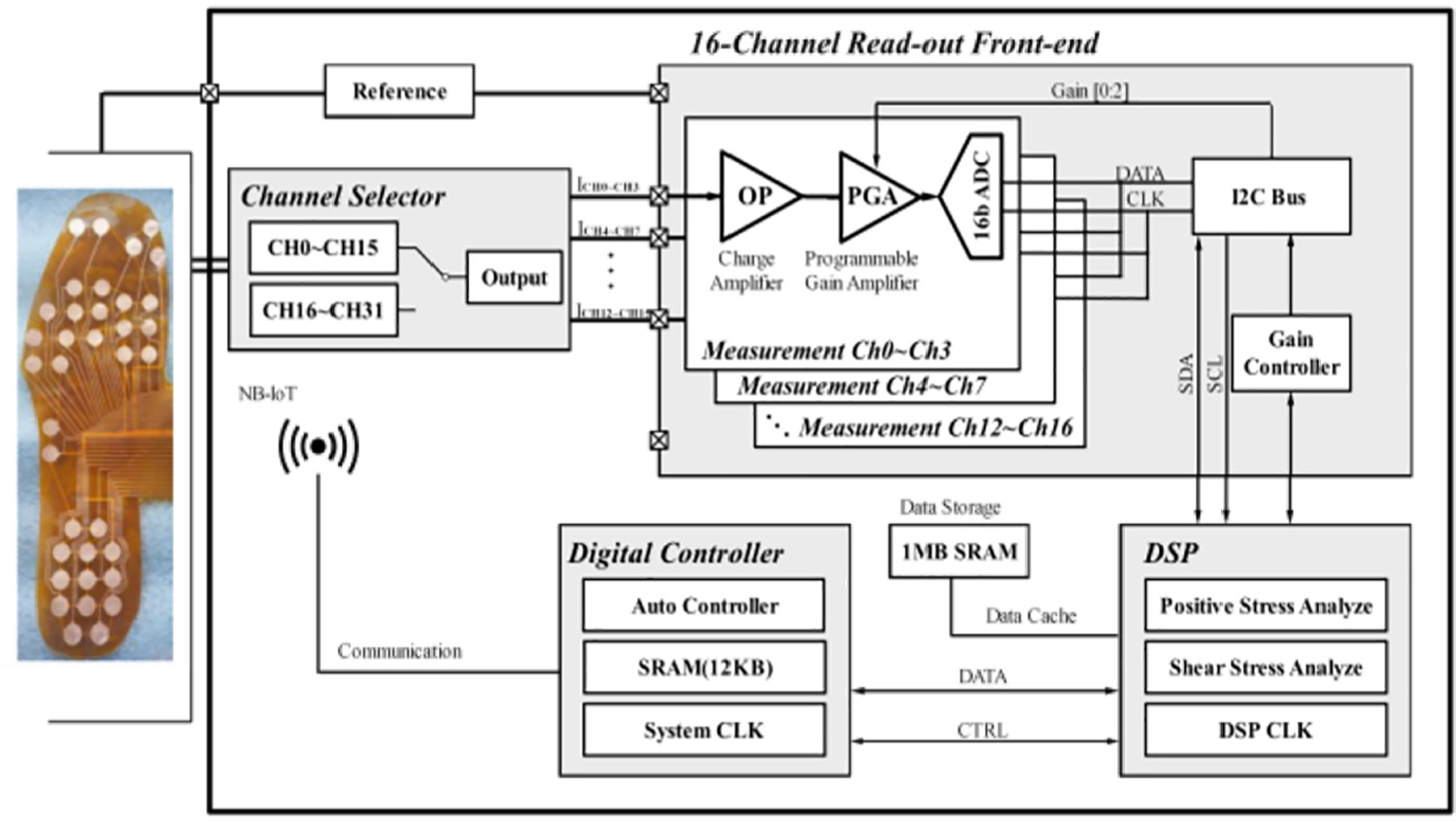
Block diagram of the readout circuit and the fabricated piezoelectric insole prototype (left foot).
During a walk event, plantar stress induced charges are converted to voltage signals by charge amplifier–based readout circuitry, whose block diagram is shown in Figure 3. Gait information could be obtained for further analysis through processing the voltage distribution. The developed piezoelectric insole system can provide high detection sensitivity at 56 mN with responsivity at 680 mV/N.
Results and discussion
As stated in the previous sections, the responsivity is associated with the frequency of the force signal. Hence, the force-to-voltage responsivity of the device was tested from 1 Hz to 1 kHz, and the obtained results for one sensing location are offered in Figure 4. Due to the limited test frequencies carried out, a curve fitting method was used to model the characterization of d33 versus frequency, which is expressed as


Variation of the piezoelectric d33 coefficient with frequency.
To validate our proposed algorithm for calibration of the instability issue introduced by the piezoelectric d33 coefficient’s dependency on frequency, 10 walking events were performed to obtain sufficient plantar normal stress data. Part of the data from one channel during a walking event are shown in Figure 5(a), which is also used to demonstrate the detection accuracy improvement after calibration.

(a) The contrast between the signal with and without calibration and (b) enlarged picture of the zone in the red cycle.
We used a force plate to record the accurate maximum force of each walking event. In Figure 5(a), there are spikes in the stepping states, and some vibrations during the dangling state mean that the signal contains high-frequency components. The figure also shows that the calibrated signal is closer to the reference signal from the force plate than its counterpart. For the data plotted in Figure 5(b), the mismatches between the directly measured/calibrated signal and the force reference signal were 89.53 and 87.27 N, respectively, demonstrating a 2.65% improvement in detection accuracy. In all 10 test sets, the average detection accuracy was boosted by 2.50%, validating the adaptability of our developed algorithm in calibrating the dependency on frequency of the piezoelectric coefficient.
According to further data analysis, the calibration effect on the frequency component of IMFs is inconstant. EMD was used to separate the signals into IMFi, and we normalized their amplitudes through the envelope line (AM part) depicted from the peak values. The algorithm works well in the high-frequency range (>200 Hz), because there are enough peaks to correctly reconstruct the frequency-modulated part of each IMF (IMF1–IMF4, shown in Figure 2(b)), which can be used to calibrate the piezoelectric d33 coefficient. However, at low frequency (<5 Hz), as shown in Figure 2(c) (IMF5–IMF8 of signal), there are fewer peak values with the increment of i, resulting in more fitting errors in the envelope line. However, the algorithm can still improve the accuracy by 2%.
Although the proposed algorithm demonstrates its power at improving detection accuracy, it is difficult to use the algorithm in real time due to its high complexity, which comes from the convolution process. However, real-time analysis is not a must when assisting chronic disease diagnosis. Sufficient gait signals can be calibrated before once being used. Our tests took around 12 s with EMD processing, and around 8 s using the normalized HHT to get the calibrated signals of all 36 channels with the maximum SRAM usage at 532 kB. 49 Nai-Fu Chang et al. have reported an online EMD microprocessor, which can decompose the signal with 256 sps sampling rate into five IMFs. 50 This work may greatly improve the efficiency of EMD in the future.
In addition, if the calibration speed is more important than the accuracy, some quicker, more compressed but less accurate algorithms can be used in our application such as TEO (Teager Energy Operator, 51 a method of using five adjacent data points to estimate the frequency of the central point, which has a smaller computational complexity than the Hilbert transform but is sensitive to nonlinearity), ZC (Zero-Crossing, 52 using zero-crossings over a short time period to estimate the average frequency in the selected time domain, 53 which needs a modest computational effort (O(N)) but low time resolution), or the wavelet-based HHT (using integration, but without needing to generate the orthogonal signal and construct the analysis signal, though the wavelet selection 54 limits its accuracy). These algorithms may be suitable for real-time applications, but some additional work should be done before they can be used.
Conclusion
This article addresses the instability responsivity of the piezoelectric-based gait signal. By separating the detected signal into several IMFs with EMD, both frequency and amplitude information are used to obtain an accurate instantaneous frequency at each stepping moment. The proposed algorithm offers an average improvement in detection accuracy of 2.50%. The study in this article potentially enables high detection accuracy for chronic disease analysis, advancing the area of insole gait analysis.
Footnotes
Handling Editor: Xing Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.